
Abstract
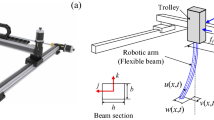
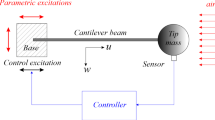
This paper presents an experimental study implementing the input shaping control of the first two modes of the vibration of a non-uniform flexible cantilever beam having a translating base. Examples of a moving cantilever beam appear in many industrial systems. Vibration suppression of the beam has important implications for improving the effectiveness of such systems. The equations of motion of the cantilever beam, including the moving base, are developed using the extended Hamilton principle. The partial differential equation representing the beam’s dynamics is then transformed into a finite-dimensional model using the Galerkin method. Accordingly, the modal parameter identification procedure is established based on experimental modal analysis. Under the estimated modal parameters, including the natural frequency and damping ratio, single- and two-mode input shaping controllers of three different types (zero vibration, zero vibration derivative, and zero vibration derivative-derivative) are designed for vibration suppression of the beam. Experimental results are discussed, reporting that the two-mode shaper’s vibration suppression was superior to the single-mode shaper. In contrast, the two-mode shaper’s settling time has slightly increased compared to that of the single-mode shaper.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
“Drill and Injection Robot,” Accessed on Jan. 28, 2021 [Online]. Available: http://nbtltd.com/products/drill-and-injection-robot/.
M. Dadfarnia, N. Jalili, B. Xian, and D. M. Dawson, “Lyapunov-based vibration control of translational Euler-Bernoulli beams using the stabilizing effect of beam damping mechanisms,” Journal of Vibration and Control, vol. 10, no. 7, pp. 933–961, 2004.
W. He and S. S. Ge, “Vibration control of a flexible beam with output constraint,” IEEE Transactions on Industrial Electronics, vol. 62, no. 8, pp. 5023–5030, 2015.
P. Shi, J. McPhee, and G. R. Heppler, “A deformation field for Euler-Bernoulli beams with applications to flexible multibody dynamics,” Multibody System Dynamics, vol. 5, no. 1, pp. 79–104, 2001.
B. A. H. Abbas, “Dynamic stability of a rotating Timo-shenko beam with a flexible root,” Journal of Sound and Vibration, vol. 108, no. 1, pp. 25–32, 1986.
T. Yokoyama, “Vibrations of a hanging Timoshenko beam under gravity,” Journal of Sound and Vibration, vol. 141, no. 2, pp. 245–258, 1990.
S. M. Han, H. Benaroya, and T. Wei, “Dynamics of transversely vibrating beams using four engineering theories,” Journal of Sound and Vibration, vol. 225, no. 5, pp. 935–988, 1999.
P.-T. Pham and K.-S. Hong, “Dynamic models of axially moving systems: A review,” Nonlinear Dynamics, vol. 100, no. 1, pp. 315–349, 2020.
T. Yokoyama, “Free-vibration characteristics of rotating Timoshenko beams,” International Journal of Mechanical Sciences, vol. 30, no. 10, pp. 743–755, 1988.
Q. C. Nguyen and K.-S. Hong, “Stabilization of an axially moving web via regulation of axial velocity,” Journal of Sound and Vibration, vol. 330, no. 20, pp. 4676–4688, 2011.
J. H. Fan, D. G. Zhang, and H. Shen, “Dynamic modeling and simulation of a rotating flexible hub-beam based on different discretization methods of deformation fields,” Archive of Applied Mechanics, vol. 90, no. 2, pp. 291–304, 2020.
Z. C. Qiu, J. D. Han, X. M. Zhang, Y. C. Wang, and Z. W. Wu, “Active vibration control of a flexible beam using a non-collocated acceleration sensor and piezoelectric patch actuator,” Journal of Sound and Vibration, vol. 326, no. 3–5, pp. 438–455, 2009.
M. H. Tso, J. Yuan, and W. O. Wong, “Suppression of random vibration in flexible structures using a hybrid vibration absorber,” Journal of Sound and Vibration, vol. 331, no. 5, pp. 974–986, 2012.
U. H. Shah and K.-S. Hong, “Input shaping control of a nuclear power plant’s fuel transport system,” Nonlinear Dynamics, vol. 77, no. 4, pp. 1737–1748, 2014.
H. H. Yoo and S. H. Shin, “Vibration analysis of rotating cantilever beams,” Journal of Sound and Vibration, vol. 212, no. 5, pp. 807–828, 1998.
J. S. Fang, D. Zhou, and Y. Dong, “Three-dimensional vibration of rotating functionally graded beams,” Journal of Vibration and Control, vol. 24, no. 15, pp. 3292–3306, 2018.
T. R. Kane, R. R. Ryan, and A. K. Banerjee, “Dynamics of a cantilever beam attached to a moving base,” Journal of Guidance Control and Dynamics, vol. 10, no. 2, pp. 139–151, 1987.
Y. Xie, P. Liu, and G. P. Cai, “Frequency identification of flexible hub-beam system using control data,” International Journal of Acoustics and Vibration, vol. 21, no. 3, pp. 257–265, 2016.
K. M. Liew, H. K. Lim, M. J. Tan, and X. Q. He, “Analysis of laminated composite beams and plates with piezoelectric patches using the element-free Galerkin method,” Computational Mechanics, vol. 29, no. 6, pp. 486–497, 2002.
M. C. Amirani, S. M. R. Khalili, and N. Nemati, “Free vibration analysis of sandwich beam with FG core using the element free Galerkin method,” Composite Structures, vol. 90, no. 3, pp. 373–379, 2009.
S. Wei, S. Q. Chen, Z. K. Peng, X. J. Dong, and W. M. Zhang, “Modal identification of multi-degree-of-freedom structures based on intrinsic chirp component decomposition method,” Applied Mathematics and Mechanics-English Edition, vol. 40, no. 12, pp. 1741–1758, 2019.
K. Liu and X. Sun, “System identification and model reduction for a single-link flexible manipulator,” Journal of Sound and Vibration, vol. 242, no. 5, pp. 867–891, 2001.
M. X. Yang, Y. Dai, Q. Huang, X. Mao, L. Li, X. Jiang, and Y. Peng, “A modal parameter identification method of machine tools based on particle swarm optimization,” Proceedings of the Institution of Mechanical Engineers Part C-Journal of Mechanical Engineering Science, vol. 233, no. 17, pp. 6112–6123, 2019.
R. F. Fung, Y. T. Liu, and C. C. Wang, “Dynamic model of an electromagnetic actuator for vibration control of a cantilever beam with a tip mass,” Journal of Sound and Vibration, vol. 288, no. 4–5, pp. 957–980, 2005.
S. M. Khot, N. P. Yelve, R. Tomar, S. Desai, and S. Vittal, “Active vibration control of cantilever beam by using PID based output feedback controller,” Journal of Vibration and Control, vol. 18, no. 3, pp. 366–372, 2012.
K.-S. Hong and P.-T. Pham, “Control of axially moving systems: A Review,” International Journal of Control Automation and Systems, vol. 17, no. 12, pp. 2983–3008, 2019.
M. A. Eshag, L. Ma, Y. K. Sun, and K. Zhang, “Robust boundary vibration control of uncertain flexible robot manipulator with spatiotemporally-varying disturbance and boundary disturbance,” International Journal of Control Automation and Systems, vol. 19, no. 2, pp. 788–798, 2021.
G. H. Kim, P.-T. Pham, Q. H. Ngo, and Q. C. Nguyen, “Neural network-based robust anti-sway control of an industrial crane subjected to hoisting dynamics and uncertain hydrodynamic forces,” International Journal of Control Automation and Systems, vol. 19, pp. 1953–1961, 2021.
Q. C. Nguyen and K.-S. Hong, “Asymptotic stabilization of a nonlinear axially moving string by adaptive boundary control,” Journal of Sound and Vibration, vol. 329, no. 22, pp. 4588–4603, 2010.
Q. C. Nguyen and K.-S. Hong, “Simultaneous control of longitudinal and transverse vibrations of an axially moving string with velocity tracking,” Journal of Sound and Vibration, vol. 331, no. 13, pp. 3006–3019, 2012.
Q. C. Nguyen, M. Piao, and K.-S. Hong, “Multivariable adaptive control of the rewinding process of a roll-to-roll system governed by hyperbolic partial differential equations,” International Journal of Control Automation and Systems, vol. 16, no. 5, pp. 2177–2186, 2018.
W. He, T. Wang, X. He, L. J. Yang, and O. Kaynak, “Dynamical modeling and boundary vibration control of a rigid-flexible wing system,” IEEE/ASME Transactions on Mechatronics, vol. 25, no. 6, pp. 2711–2721, 2020.
W. He, T. Meng, X. He, and C. Sun, “Iterative learning control for a flapping wing micro aerial vehicle under distributed disturbances,” IEEE Transactions on Cybernetics, vol. 49, no. 4, pp. 1524–1535, 2018.
W. He, H. Gao, C. Zhou, C. Yang, and Z. Li, “Reinforcement learning control of a flexible two-link manipulator: An experimental investigation,” to appear in IEEE Transactions on Systems, Man, and Cybernetics: Systems, Mar. 2020. DOI: https://doi.org/10.1109/TSME.2020.2975232
C. G. Kang, R. Hassan, and K. Y. Kim, “Analysis of a generalized ZVD shaper using impulse vectors,” International Journal of Control Automation and Systems, vol. 18, no. 8, pp. 2088–2094, 2020.
T. Zhang, M. H. Zhang, and Y. B. Zou, “Time-optimal and smooth trajectory planning for robot manipulators,” International Journal of Control Automation and Systems, vol. 19, no 1, pp. 512–531, 2021.
W. Singhose, “Command shaping for flexible systems: A review of the first 50 years,” International Journal of Precision Engineering and Manufacturing, vol. 10, no. 4, pp. 153–168, 2009.
K.-S. Hong and U. H. Shah, Dynamics and Control of Industrial Cranes, Springer, Singapore, 2019.
U. H. Shah, K.-S. Hong, and S.-H. Choi, “Open-loop vibration control of an underwater system: application to refueling machine,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 4, pp. 1622–1632, 2017.
S. Park, W. K. Chung, Y. Youm, and J. W. Lee, “Natural frequencies and open-loop responses of an elastic beam fixed on a moving cart and carrying an intermediate lumped mass,” Journal of Sound and Vibration, vol. 230, no. 3, pp. 591–615, 2000.
N. M. M. Maia and J. M. M. Silva, Theoretical and Experimental Modal Analysis, Wiley, New York, 1997.
R. Craig and A. Kurdila, Fundamentals of Structural Dynamics, John Wiley & Sons. Inc, New Jersey, 2006.
J. D. Ewins, Model Testing: Theory, Practice and Application, Research Studies Press, Hertfordshire, 2006.
A. Brandt, Noise and Vibration Analysis: Signal Analysis and Experimental Procedures, John Wiley & Sons, Chichester, 2011.
D. J. Inman, Engineering Vibration, Pearson Education, Inc., New Jersey, 2008.
N. C. Singer, Residual Vibration Reduction in Computer Controlled Machines, Massachusetts Institute of Technology, Cambridge, 1989.
N. C. Singer and W. P. Seering, “Preshaping command inputs to reduce system vibration,” Journal of Dynamic Systems Measurement and Control-Transactions of the ASME, vol. 112, no. 1, pp. 76–82, 1990.
N. T. G. Vu, Control of a 3D Flexible Cantilever Beam, M.S. thesis, Dept. of Mechatronics, Ho Chi Minh City Univ. of Tech., Ho Chi Minh City, 2020.
N. Roy, M. Violin, and E. Cavro, “Sine sweep effect on specimen modal parameters characterization,” Advances in Aircraft and Spacecraft Science, vol. 5, no. 2, pp. 187–204, 2018.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor Kyoung Kwan Ahn
This research was funded in part by Vietnam National University Ho Chi Minh City (VNU-HCM) under grant no. C2018-20-01 and in part by the National Research Foundation (NRF) of Korea under the auspices of the Ministry of Science and ICT, Korea (grant no. NRF-2020R1A2B5B03096000).
Phuong-Tung Pham received his B.S. and M.S. degrees in mechanical engineering from Ho Chi Minh City University of Technology, in 2016 and 2018, respectively. He is currently a Ph.D. candidate in the School of Mechanical Engineering, Pusan National University, Korea. His research interests include nonlinear control, adaptive control, vibration control, and control of distributed parameter systems.
Gyoung-Hahn Kim received his B.S. degree in mechanical engineering from Yeungnam University, Gyeongsan, in 2013 and his Ph.D. degree in mechanical engineering, Pusan National University, Busan, Korea, in 2021. He is currently a Postdoctoral Fellow in the Institute of Intelligent Logistics and Big Data, Pusan National University. Dr. Kim’s current research interests include sliding mode control, adaptive neural network control, reinforcement deep learning, nonlinear system identification, data-driven control, and control applications to industrial robotics.
Quoc Chi Nguyen received his B.S. degree in mechanical engineering from Ho Chi Minh City University of Technology (HCMUT), Vietnam, in 2002, an M.S. degree in cybernetics from HCMUT, Vietnam, in 2006, and a Ph.D. degree in mechanical engineering from the Pusan National University, Korea, in 2012. Dr. Nguyen was a Marie Curie FP7 postdoctoral fellow at the School of Mechanical Engineering, Tel Aviv University, from 2013 to 2014. He is currently an associate professor with the Department of Mechatronics, HCMUT. Dr. Nguyen’s current research interests include nonlinear systems theory, adaptive control, robotics, and distributed parameter systems.
Keum-Shik Hong Please see vol. 17, no. 12, p. 3008, December, 2019 of this journal.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Pham, PT., Kim, GH., Nguyen, Q.C. et al. Control of a Non-uniform Flexible Beam: Identification of First Two Modes. Int. J. Control Autom. Syst. 19, 3698–3707 (2021). https://doi.org/10.1007/s12555-020-0913-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0913-8