
Abstract
The study of unclear phenomena has been facilitated by fuzzy sets. Fuzzy set extensions have allowed for a more detailed investigation of these kinds of research. Finding quantitative measures for ambiguity and other characteristics of these occurrences thus becomes a challenge. As a fuzzy set extension, several researchers proposed intuitionistic fuzzy (IF) sets and used them in many contexts since they were first described by Atanassov. One such use is to solve multi-criteria decision-making issues. This study measure the amount of knowledge linked with an IF-set. An IF-knowledge measure is proposed. Using numerical examples, its utility and validity are examined. Besides this, the IF-accuracy measure, IF-information measure, similarity measure, and dissimilarity measure, are the four new measures that are derived from the proposed IF-knowledge measure. All these measures are checked for their validation and their properties are discussed. Pattern detection is taken as an application of the proposed accuracy measure. Finally, a modified VIKOR approach depending upon the proposed similarity and dissimilarity measure is proposed to deal with an MCDM issue in an intuitionistic fuzzy environment. The efficiency of the proposed approach is demonstrated by using a numerical example. A comparative study is also provided to assess the feasibility of the proposed approach.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Based on Zadeh’s fuzzy set (Zadeh 1965), Atanassov (1986) gave the notion of intuitionistic fuzzy (IF) set. The requirement that the non-membership degree and membership degree after adding give one is relaxed by Atanassov’s IF-sets. We can say that an IF-set is a general form of fuzzy sets as described in Bustince et al. (2015), Couso and Bustince (2018). For an IF-set, the hesitation degree is calculated by subtracting the sum of the non-membership and membership degrees from one. Due to its benefit in modelling uncertain information systems, Bustince (2000) has given the IF-set theory a lot of attention. Numerous areas, including decision-making (Ye 2010b; Xia and Xu 2012) and uncertainty reasoning (Papakostas et al. 2013) have effectively used the concept of IF-sets.
To quantify the fuzziness of a fuzzy set, Zadeh (1968) initially established the concept of entropy. In certain ways, the Shannon entropy idea (Shannon 1948), which was first introduced in probability theory, is related to the fuzzy entropy concept proposed for fuzzy sets. Luca and Termini (1972) developed the axiomatic idea of entropy. The measure of intuitionistic entropy was first axiomatically established by Burillo and Bustince (1996), and it was just based on hesitation degree. The ratio of two distance values served as the basis for the definition of IF-sets provided by Szmidt and Kacprzyk (2001); Szmidt et al. (2014a). Many authors including Wang and Xin (2005), Song et al. (2017), Garg and Kaur (2018), Garg (2019) etc. gave attention to the definition of entropy of an IF-set. Find entropy of IF-sets and use this in evaluating attribution weighting vectors have also been focused on by some researchers. According to Szmidt et al. (2014a), the entropy cannot properly describe the uncertainty present in an IF-set. As a result, using an entropy measure alone may not be sufficient to create an acceptable uncertainty estimate for IF-sets. In computing the uncertainty of IF-sets, Pal et al. (2013) have underlined the distinction between entropy and hesitation. Entropy and hesitation together may provide a useful technique to calculate the entire quantity of uncertainty associated with an IF-set.
In general, the IF-knowledge measure is connected to the usable data that an IF-set provides. According to information theory, having a lot of information means having a lot of knowledge, which is beneficial for making decisions. Accordingly, rather than the entropy measure, the concept of knowledge measure may be seen as a complementary idea to the total uncertainty measure. (see Arya and Kumar 2021) This indicates that more knowledge is always accompanied by less overall uncertainty. Szmidt et al. (2014a) proposed an IF-knowledge measure by taking into account both entropy and hesitation of an IF-set to differentiate between different types of intuitionistic fuzzy information. In order to resolve challenges with multi-criteria decision-making (MCDM), Das et al. (2016) found that each attribute’s weight has been estimated by using the knowledge measure. By calculating the separation between an IF-set and the most uncertain IF-set, Nguyen (2015) has created a novel knowledge measure. Guo (2015) offered a new notion of knowledge measure for IF-set. The model studied by Guo (2015) has been widely utilized to establish the intuitionistic fuzzy entropy by calculating the difference between an IF-set and its complement. A detailed inspection of the axiomatic definitions of IF-information measures was also carried out by Das et al. (2017).
In an MCDM issue, we try to find out a particular alternative from given alternatives that meets the greatest number of predetermined criteria. Numerous scholars including Hwang and Yoon (1981), Mareschal et al. (1984), Gomes and Lima (1991), Opricovic (1998), Yager (2020), Dutta and Saikia (2021), Ohlan (2022), Gupta and Kumar (2022) etc. have looked at various strategies for selecting a most preferable alternative from all available alternatives. Every solution to an MCDM issue has a key term attached to it like criteria weights. By using the justified criteria weights, we may identify the best alternative. Therefore, extra attention must be given while evaluating the weights of each criterion. Criteria weights are calculated by several approaches. For the evaluation of criteria, Chen and Li (2010) provided the following two ways-
-
Objective Evaluation approach: The criterion weights in this approach are determined using mathematical formulas. The most acceptable objective evaluation approach is the calculation of criterion weights using information and knowledge measures (see Diakoulaki et al. 1995; Fan 2002; Odu 2019).
-
Subjective Evaluation approach: In this approach, resource persons directly assess the criteria weights. Subjective weights are determined by the preferences indicated by resource persons (see Chu et al. 1979; Ginevičius and Podvezko 2005; Zoraghi et al. 2013).
When dealing with MCDM issues, Opricovic (1998) suggested an approach, called VIKORFootnote 1 approach, which can offer a compromise solution in an MCDM issue. In this approach, the precise assessment of “Closeness” to the positive ideal solution is employed to select the best alternative. Many researchers extended the traditional VIKOR approach to finding the solutions of MCDM, MADM, and MCGDM problems. Chen and Chang (2016) proposed IF-geometric averaging operator to solve MADM issues. Wang and Chang (2005) solved the MCGDM problem by using the VIKOR approach in a fuzzy environment. Sanayei et al. (2010) took the problem of supplier selection and solve it with help of the fuzzy VIKOR approach. Shemshadi et al. (2011) solved the supplier selection method by entropy-based fuzzy VIKOR approach. By using triangular intuitionistic fuzzy numbers, Wan et al. (2013) extended the Concept of the VIKOR approach to solving multi-attribute group decision-making problems. Chang (2014) studied a case to find the best hospital in Taiwan. By using triangular fuzzy numbers, Rostamzadeh et al. (2015) found the solution to the green supply chain management problem by using the VIKOR approach. Gupta et al. (2016) extended the VIKOR approach for the selection of plant location. Zeng et al. (2019) used the novel score function in the VIKOR approach to finding the best alternative. Ravichandran et al. (2020) solved the personnel selection problem by extended VIKOR approach. Hu et al. (2020) gave a ranking to the doctors by using the VIKOR approach. Gupta and Kumar (2022) proposed VIKOR approach based on IF-scale-invariant information measure with correlation coefficients for solving MCDM. Most of the researchers used the distance measure in calculating maximum group utility and the minimum individual regret in the VIKOR approach. But in the proposed approach, we use the proposed similarity as well as dissimilarity measure and find the results are highly encouraging.
According to the study presented above, there is still space for debate about IF-knowledge measures. The majority of studies on the IF-knowledge and information measures primarily concentrate on the distinction between IF-sets and their complement. Even though Nguyen (2015) pioneered this novel approach to analysing IF-knowledge measures, further research is required to enhance this type of measure and provide a suitable measure that will find the total amount of knowledge for an IF-set. Some of the valuable conclusions from the study on IF-information and knowledge measures cannot fully address some problems in intuitionistic fuzzy environment and run into different difficulties, including the following:
- \(\checkmark\):
-
The vast majority of IF-knowledge and information measures do not follow the order required for linguistic comparison. But, the proposed IF-knowledge measure fulfils the desired order (see Example 1).
- \(\checkmark\):
-
The bulk of the IF-knowledge and information measures that are documented in the literature provide absurd results when calculating the ambiguity between different IF-sets (see Example 2).
- \(\checkmark\):
-
The majority of IF-knowledge and information measures compute the same criteria weights for various alternatives, while the criteria weights calculated by the proposed IF-knowledge measure are different for different alternatives (see Example 3).
- \(\checkmark\):
-
The vast majority of similarity and dissimilarity measures in intuitionistic fuzzy environment are not able to detect a pattern from the available patterns. But, the proposed IF-accuracy measure clearly detects the pattern from the given patterns (see Example 4).
This inspires us to provide a fresh way to gauge one’s understanding of IF-sets. From these facts, we proposed an effective IF-knowledge measure in this study. The main highlights of this study are as follows
- \(\checkmark\):
-
An IF-knowledge measure, together with its properties, is proposed.
- \(\checkmark\):
-
We provide numerical examples to show how the proposed IF-knowledge measure overcomes the drawbacks of some current IF-knowledge and information measures.
- \(\checkmark\):
-
Based on the proposed knowledge measure, we derived a new accuracy measure, information measure, similarity measure, and dissimilarity measure in intuitionistic fuzzy environment. Some properties are also discussed.
- \(\checkmark\):
-
The proposed accuracy measure is used in pattern detection. A comparison with various measures is provided to demonstrate the efficacy of the proposed accuracy measure in pattern detection.
- \(\checkmark\):
-
To address an MCDM issue, a modified VIKOR approach is presented. In the proposed approach, we use proposed IF-similarity and dissimilarity measures in place of the distance measure.
- \(\checkmark\):
-
We also show how effective the proposed approach is for selecting the best university for a student in the MCDM issue.
This study’s primary points are as follows: Sect. 1 covered the primary objective of this article and related literature. The requirement and main contribution of this study are discussed. In Sect. 2, some of the basic definitions are discussed. In Sect. 3, an IF-knowledge measure is suggested and is checked for validation. Some of its properties are mentioned and a comparison with some other measures is given. In Sect. 4, we developed four additional measures based on the proposed IF-knowledge measure: accuracy measure, information measure, similarity measure, and dissimilarity measure in intuitionistic fuzzy environment. They are validated, and it is discussed what properties they have. The proposed accuracy measure is used in pattern detection and is compared with some existing measures for detecting patterns. Section 5 discusses a modified VIKOR approach depending upon proposed similarity and dissimilarity measures to solve MCDM issues. By employing a numerical example to tackle the MCDM issues, the proposed approach is compared with previously published approaches in the literature. The conclusion and recommendations for more study are given in Sect. 6.
2 Preliminaries
In the present section, we quickly recap a few pieces of background information on IF-sets to make the upcoming exposition easier.
Assume that
is the collection of total probability distributions for t \(\ge\) 2. Shannon’s definition of the information measure is
where \(\Lambda\) \(\in\) \(\Omega _{t}\). There are many generalizations of Shannon entropy (Shannon 1948) given by many researchers including Rényi (1961), Havdra and Charvat (1967), Tsallis (1988), Boekee and Vander Lubbe (1980) etc. The r-norm entropy explored by Boekee and Vander Lubbe (1980) is provided by
Furthermore, the r-norm entropy is equivalent to the Shannon entropy when \(r \rightarrow 1\) and \(E_{r}(\Lambda ) \rightarrow (1-\max (\lambda _i))\) when \(r \rightarrow \infty\). The r-norm entropy was further generalized by Hooda (2004), Kumar (2009), Kumar et al. (2014), Joshi and Kumar (2018).
Now, we provide the necessary background information on IF-sets and their generalizations.
Definition 1
(Zadeh 1965) Let D(\(\ne\) \(\phi\)) be a finite set. A Fuzzy set \({\bar{R}}\) defined on D is given by
where \(\mu _{{\bar{R}}}\): D \(\rightarrow\) \(\left[ 0,1\right]\) represents membership function for the fuzzy set \({\bar{R}}\).
Definition 2
(Atanassov 1986) Let D(\(\ne\) \(\phi\)) be a finite set. An IF-set R defined on D is given by
where \(\mu _{R}\): D \(\rightarrow\) \(\left[ 0,1\right]\) is membership function and \(\nu _{R}\): D \(\rightarrow\) \(\left[ 0,1\right]\) is non-membership function with condition that
For an IF-set R described on D, the hesitation degree (\(\pi _R\)) is computed by the formula given below
Clearly, \(\pi _R(d_i)\) \(\in\) [0,1]. Hesitation degree can also be regarded as an intuitionistic index and is used to represent the degree of the hesitance of the element \(d_i\) \(\in\) D in IF-set R. Higher value of \(\pi _R(d_i)\) corresponds to high vagueness. Also, when \(\pi _R(d_i)=0\), then the IF-set R decays into a simple fuzzy set. The most IF-set is an IF-set in which the membership and non-membership function values are identical for every element of the set. Every element of most IF-set is called a crossover element.
Note: From this point forward, the term IFS(D) shall refer to the collection of all the IF-sets.
Definition 3
Consider two IF-sets \(R,S \in\) IFS(D) defined by
then following are the basic operations on IF-sets:
Definition 4
(Szmidt and Kacprzyk 2001) To define a function E: IFS(D) \(\rightarrow\) \(\left[ 0,1\right]\) as an IF-information measure, it must satisfy the following four axioms:
- (E1):
-
E(R)=1 \(\Leftrightarrow\) \(\mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D\), i.e., R is most IF-set.
- (E2):
-
E(R)=0 \(\Leftrightarrow\) \(\mu _{R}(d_i)=0\), \(\nu _{R}(d_i)=1\) or \(\mu _{R}(d_i)=1\), \(\nu _{R}(d_i)=0\) \(\forall\) \(d_i \in D\), i.e., R is a crisp set.
- (E3):
-
E(R) \(\le\) E(S) \(\Leftrightarrow\) R \(\subseteq\) S.
- (E4):
-
If \(R^{c}\) represents complement of a fuzzy set R, then \(E(R)=E(R^{c})\).
The fuzzy entropy calculates the Fuzziness of a fuzzy set. In addition, a knowledge measure determines the total quantity of knowledge. According to Singh et al. (2019), these two theories are complimentary to one another.
Definition 5
(Singh et al. 2019) The following four axioms must be met to define a function K: IFS(D) \(\rightarrow\) \(\left[ 0,1\right]\) as an IF-knowledge measure:
- (K1):
-
K(R)=1 \(\Leftrightarrow\) \(\mu _{R}(d_i)=0\), \(\nu _{R}(d_i)=1\) or \(\mu _{R}(d_i)=1\), \(\nu _{R}(d_i)=0\) \(\forall\) \(d_i \in D\), i.e., R is a crisp set.
- (K2):
-
K(R)=0 \(\Leftrightarrow\) \(\mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D\), i.e., R is most IF-set.
- (K3):
-
K(R) \(\ge\) K(S) \(\Leftrightarrow\) R \(\subseteq\) S.
- (K4):
-
If \(R^{c}\) represents complement of a fuzzy set R, then \(K(R)=K(R^{c})\).
Definition 6
(Hung and Yang 2004; Chen and Chang 2015) Let \(R,S,T \in IFS(D)\). A mapping \(S_m: IFS(D) \times IFS(D) \rightarrow [0,1]\) is considered to be an IF-similarity measure if it meets the four axioms listed below:
- (S1):
-
\(0 \le S_m(R,S) \le 1\).
- (S2):
-
\(S_m(R,S)=S_m(S,R)\).
- (S3):
-
\(S_m(R,S)=1\) \(\Leftrightarrow\) \(R=S\).
- (S4):
-
If \(R \subseteq S \subseteq T\), then \(S_m(R,S) \ge S_m(R,T)\) & \(S_m(S,T) \ge S_m(R,T)\).
Definition 7
(Wang and Xin 2005) Let \(R,S,T \in IFS(D)\). A mapping \(D_m: IFS(D) \times IFS(D) \rightarrow [0,1]\) is considered to be a dissimilarity/distance measure if it meets the four axioms listed below:
- (D1):
-
\(0 \le D_m(R,S) \le 1\).
- (D2):
-
\(D_m(R,S)=D_m(S,R)\).
- (D3):
-
\(D_m(R,S)=0\) \(\Leftrightarrow\) \(R=S\).
- (D4):
-
If \(R \subseteq S \subseteq T\), then \(D_m(R,S) \le D_m(R,T)\) & \(D_m(S,T) \le D_m(R,T)\).
Definition 8
Let \(R,S \in IFS(D)\). A mapping \(A_m: IFS(D) \times IFS(D) \rightarrow [0,1]\) is said to be accuracy measure in S w.r.t. R, if it fulfils the following four axioms:
- (A1):
-
\(A_m(R,S) \in [0,1]\).
- (A2):
-
\(A_m(R,S)=0\) \(\Leftrightarrow\) \(\mu _{R}(d_i)=\nu _{R}(d_i)\).
- (A3):
-
\(A_m(R,S)=1\) if \(\mu _{R}(d_i) =\mu _{S}(d_i)=0\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=1\) or \(\mu _{R}(d_i) =\mu _{S}(d_i)=1\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=0\), i.e., Both R and S are equal and crisp IF-sets.
- (A4):
-
\(A_m(R,S)=K(R)\) if \(R=S\), where K(R) is knowledge measure.
As briefly described below, Szmidt and Kacprzyk (1998) provided a technique for converting IF-sets into fuzzy sets.
Definition 9
(Szmidt and Kacprzyk 1998) Let R \(\in\) IFS(D), then the fuzzy membership function \(\mu _{{\bar{R}}}(d_i)\) corresponding to fuzzy set \({\bar{R}}\) is given as follow
In the next section, we proposed an IF-knowledge measure.
3 Proposed intuitionistic fuzzy knowledge measure
3.1 Definition
Let R \(\in\) IFS(D). Based on the concept of r-norm information measure proposed by Hooda (2004), Verma and Sharma (2011), and Bajaj et al. (2012), we define a new IF-knowledge measure for IF-set R as follow
for some R \(\in\) IFS(D). Further on solving, we can write Eq. (10) as follows
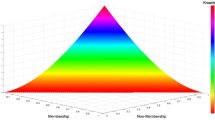
Further, if \(\nu _R(d_i)=1-\mu _R(d_i), \forall d_i \in D\) then Eq. (11) becomes a fuzzy knowledge measure which is studied by Joshi (2023) and is slightly different from the knowledge measure studied by Singh and Kumar (2023). Figure 1 represents the total quantity of the knowledge passed by the proposed IF-knowledge measure.

Knowledge passed by proposed IF-knowledge measure
Now, we test the validity of the proposed IF-knowledge measure \(K^A_{I}\).
Theorem 1
Let \(R=\left\{ \langle d_i, \mu _{R}(d_i), \nu _{R}(d_i) \rangle : d_i \in D\right\}\) and \(S=\left\{ \langle d_i, \mu _{S}(d_i), \nu _{S}(d_i) \rangle : d_i \in D\right\}\) are two members of IFS(D) for a finite set D\(\left( \ne \phi \right)\). Define a mapping \(K^A_I\):IFS(D) \(\rightarrow\) \(\left[ 0,1\right]\) given in Eq. (11). Then, \(K^A_I\) is a valid IF-knowledge measure if it fulfils the following axioms, (K1)-(K4):
- (K1):
-
\(K^A_I(R)=1 \Leftrightarrow \mu _{R}(d_i)=0\), \(\nu _{R}(d_i)=1\) or \(\mu _{R}(d_i)=1\), \(\nu _{R}(d_i)=0\) \(\forall\) \(d_i \in D\), i.e., R is a crisp set.
- (K2):
-
\(K^A_I(R)=0 \Leftrightarrow \mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D\), i.e., R is most IF-set.
- (K3):
-
\(K^A_I(R) \ge K^A_I(S) \Leftrightarrow\) R \(\subseteq\) S.
- (K4):
-
If \(R^{c}\) represents complement of a fuzzy set R, then \(K^A_I(R)=K^A_I(R^c)\).
Proof
(K1). First, we consider
This proves axiom K1.
(K2). Let us take \(K^A_I\)(R)=0. Then, from Eq. (11), we have
which gives
i.e.,
Thus, we get \(\mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D.\)
Conversely, Let \(\mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D,\) then Eq. (11) implies \(K^A_I\)(R)=0.
This proves axiom K2.
(K3). To prove this axiom, first, we prove that function
is an increasing function w.r.t. t and decreasing function w.r.t. s, where \(s,t \in [0,1]\). Partially differentiate function f w.r.t. s, we have
Now, critical points of s can be found by putting
which gives \(s=t\).
Here, two cases arise given below:
i.e., function f is increasing function for \(s \ge t\) and is decreasing function for \(s \le t\).
Similarly, we have
i.e., function f is decreasing function for \(s \ge t\) and is increasing function for \(s \le t\).
Now, take R,S \(\in\) IFS(D) s.t. \(R \subseteq S\). Let \(D_1\) and \(D_2\) are two partitions of D s.t. \(D=D_1\cup D_2\) and
Thus, from the monotonic behaviour of function f and from Eq. (11), it is easy to prove that \(K^A_I(R)\) \(\ge\) \(K^A_I(S)\). This proves axiom (K3).
(K4). It is easy to see that \(R^c =\left\{ \langle d_i, \nu _{R}(d_i), \mu _{R}(d_i) \rangle : d_i \in D\right\}\),
i.e.,
Thus, from Eq. (11), we get \(K^A_I(R)=K^A_I(R^c)\). This proves axiom (K4).
Thus, \(K^A_I\)(R) is a valid IF-knowledge measure. \(\square\)
3.2 Properties
Now, we study about some of the characteristics of the suggested knowledge measure \(K^A_I\)(R).
Theorem 2
Some following properties are fulfilled by the proposed IF-knowledge measure \(K^A_I\):
-
(1)
For an IF-set R, \(K^A_I\)(R) \(\in\) [0,1].
-
(2)
\(K^A_I(R)=K^A_I(R^c)\).
-
(3)
\(K^A_I(R \cup S)+K^A_I(R \cap S)=K^A_I(R)+K^A_I(S)\) for any two arbitrary IF-sets R, S.
-
(4)
\(K^A_I(R)\) attains its highest value for crisp set R and attains its lowest value for most IF-set R.
Proof
(1). Since, \(\mu _{R}(d_i)\), \(\nu _{R}(d_i) \in \left[ 0,1\right]\) \(\forall d_i \in \hbox {D}\), therefore, \(-1 \le \mu _{R}(d_i)-\nu _{R}(d_i) \le 1\) \(\forall d_i \in D.\)
\(\Rightarrow\) \(0 \le \left( \mu _{R}(d_i)-\nu _{R}(d_i)\right) ^2 \le 1\) \(\forall d_i \in D\),
\(\Rightarrow\) \(1 \le \sqrt{1+\left( \mu _{R}(d_i)-\nu _{R}(d_i)\right) ^2} \le \sqrt{2}\) \(\forall d_i \in D\),
\(\Rightarrow\) \(0 \le \sqrt{1+\left( \mu _{R}(d_i)-\nu _{R}(d_i)\right) ^2}-1 \le \sqrt{2}-1\) \(\forall d_i \in D\),
\(\Rightarrow 0 \le \frac{(\sqrt{2}-1)^{-1} }{t} \sum _{i=1}^{t} \left[ \sqrt{1+\left( \mu _{R}(d_i)-\nu _{R}(d_i)\right) ^2}-1\right] \le 1\),
\(\Rightarrow 0 \le K^A_I(R) \le 1\).
\(\Rightarrow K^A_I(R) \in [0,1]\).
(2). Proof is obvious from axiom (K4).
(3). Let R, S \(\in\) IFS(D). We take the partition of D as follows:
i.e.,
where \(\mu _{R}(d_i)\) and \(\mu _{S}(d_i)\) are the membership functions and \(\nu _{R}(d_i)\) and \(\nu _{S}(d_i)\) are the non-membership functions for the IF-set R and S, respectively.
Now, \(\forall d_i \in D\),
which gives
On solving, we get
(4). Proof is obvious from axioms (K1) and (K2). \(\square\)
3.3 Comparative study
Now, we contrast the suggested IF-knowledge measure with the other measures that are already in use. The benefits of new knowledge measure are explored by this comparison. We examine these benefits in relation to the estimation of ambiguity content of IF-sets, the estimation of attribute weights in MCDM issues, and the manipulation of structured linguistic variables. Among the available measures in the literature are
3.3.1 Structured linguistic computation
The idea of an IF-set is utilized to represent linguistic variables, and the linguistic hedges are used to represent the operations on an IF-Set. The linguistic hedges, which are used to reflect linguistic variables, include “MORE”, “LESS”, “VERY”, “FEW”, “SLIGHTLY” and “LESS”. In this situation, we investigated these linguistic hedges and compared the suggested IF-knowledge measure’s performance to existing measures.
Let us take an IF-set \(R=\left\{ \langle d_i, \mu _{R}(d_i), \nu _{R}(d_i) \rangle : d_i \in D\right\}\) defined on a finite set D(\(\ne \phi\)) and treat this IF-set as “Wide” on D. For \(k>0\), De et al. (2000) define the modifier of IF-set R as follow
De et al. (2000) define the concentration and dilatation for an IF-set R as follow
Concentration and dilatation are used for modifiers. For the sake of clarity, we shorten the following terms: W stands for WIDE, V.W. stands for VERY WIDE, M.L.W. stands for MORE/LESS WIDE, Q.V.W. stands for QUITE VERY WIDE and V.V.W. stands for VERY VERY WIDE. Hedges for the IF-set R are defined as follows:
It makes intuitive sense that as we move from set \(R^{0.5}\) to set \(R^4\), the uncertainty concealed in them decreases and the knowledge amount they express grows. For top performance, the information measure E(R) of an IF-set R must match the following criteria:
where E(R) is the information measure of an IF-set R. On the other hand, a knowledge measure must adhere to the following criteria:
where \(K^A\)(R) is knowledge measure of IF-set R.
Now, to assess the efficacy of the suggested knowledge measure \(K^A_I\)(R), consider the following example:
Example 1
Let us consider a set \(\hbox {D}= \left\{ d_i, 1\le i \le 5\right\}\) and let R is an IF-set defined on D defined as follows:
Considering an IF-set “R” on D as “WIDE” and assuming the linguistic variables according to Eq. (31). Using Eq. (29), we may produce the following IF-sets:
Now, we compared the suggested IF-knowledge measure’s performance to existing measures described in the literature. The values of the existing measures and the proposed IF-knowledge measure are compared and shown in Table 1.
Following observations are made from Table 1:
Now, we found that, except \(E_{HY}(R)\) and \(K_I^A(R)\), none of the information and knowledge measures follow the sequence indicated in Eqs. (32) and (33). It suggests that they are not performing well. Then, we solely compare information measure \(E_{HY}(R)\) and knowledge measure \(K_I^A(R)\).
To do this, we use another IF-set provided by
The observed values are computed in Table 2 and the following observations are made from it:
In this case, we see that the information measure \(E_{HY}(R)\) does not match the order stated in Eq. (32). But the proposed knowledge measure goes in the right order. Consequently, the efficacy of the proposed knowledge measure is really amazing.
3.3.2 Ambiguity computation
Two separate IF-sets have different levels of ambiguity. However, some knowledge measures provide the same ambiguity values corresponding to various IF-sets. As a result, a new knowledge measure that generalizes previously recognized knowledge measures is required. The effectiveness of the proposed measure is illustrated in the following example:
Example 2
Define a set D=\(\left\{ d_1,d_2,d_3,d_4\right\}\) and take \(R_1,R_2,R_3,R_4 \in\) IFS(D) as follows
We now determine the ambiguous content of given IF-sets using some previously established knowledge measures and suggested knowledge measure. Table 3 displays the results of the calculations.
We can observe from Table 3 that the ambiguity content as determined by existing knowledge measures is the same for various IF-sets. However, the proposed knowledge measure clearly distinguishes between these IF-sets. Therefore, a fresh approach is constantly needed.
3.3.3 Attribute weights evaluation
The attribute weights are significant in an MCDM issue. Here, we calculate attribute weights using both the proposed measure and the previously existing knowledge measures defined for IF-sets. Take a look at an example of this.
Example 3
Let D is a decision matrix corresponding to a set of alternatives \(\left\{ L_1,L_2,L_3,L_4\right\}\) and a set of attributes \(\left\{ T_1,T_2,T_3,T_4\right\}\) established in an intuitionistic fuzzy environment.
The attribute weights can be determined using one of two approaches given below:
- (A).:
-
Approach depending upon information measures - We can determine the weights corresponding to various attributes by using the formula given as follows:
$$\begin{aligned} w_j=\frac{1-E(T_j)}{q-\sum _{j=1}^{q}E(T_j)}, j=1,2,3,\dots ,q; \end{aligned}$$(40)where E denotes information measures corresponding to an IF-set.
- (B).:
-
Approach depending upon knowledge measures - We can determine the weights corresponding to various attributes by using the formula given as follows:
$$\begin{aligned} w_j=\frac{K(T_j)}{\sum _{j=1}^{q} K(T_j)}, j=1,2,3,\dots ,q; \end{aligned}$$(41)where K denotes knowledge measures corresponding to an IF-set.
In this example, we calculate weights calculated by knowledge measures only. The attribute weights are computed in the Table 4.
Table 4 demonstrates that the attribute weights determined by some existing knowledge measures are inconsistent. In some cases, the weights assigned to different attributes are the same. However, the weights assigned by the proposed knowledge measure are different for different attributes. Thus, it is necessary to develop a new knowledge measure for IF-sets.
4 Deduction of some new measures
In the present section, some more measures that are derived from the proposed IF-knowledge measure, are suggested.
4.1 IF-accuracy measure
The quantity of intuitionistic fuzzy accuracy can be equated with the quantity of intuitionistic fuzzy knowledge. The notion of IF-accuracy measure is used when we wish to know how accurate IF-set S is in comparison to another IF-set R. Verma and Sharma (2014) expanded the notion of inaccuracy measure for IF-sets from fuzzy sets and gave Intuitionistic Fuzzy Inaccuracy measure as follows:
where \(R,S \in IFS(D)\).
Now, depending upon proposed IF-knowledge measure \(K_I^A(R)\), we define a new IF-accuracy measure \(K^{I}_{accy}(R,S)\) of IF-set S w.r.t. IF-set R as follows:
Now we check for the validation of the proposed accuracy measure \(K^{I}_{accy}\).
Theorem 3
Let \(R=\left\{ \langle d_i, \mu _{R}(d_i), \nu _{R}(d_i) \rangle : d_i \in D\right\}\) and \(S=\left\{ \langle d_i, \mu _{S}(d_i), \nu _{S}(d_i) \rangle : d_i \in D\right\}\) are two members of IFS(D) for a finite set D\(\left( \ne \phi \right)\). Define a mapping \(K^{I}_{accy}:IFS(D) \times IFS(D)\) \(\rightarrow\) \(\left[ 0,1\right]\) given in Eq. (43). Then, \(K^{I}_{accy}(R,S)\) is a valid accuracy measure for IF-set S relative to R if it fulfils the following axioms, (A1)-(A4):
- (A1):
-
\(K^{I}_{accy}(R,S) \in [0,1]\).
- (A2):
-
\(K^{I}_{accy}(R,S)=0\) \(\Leftrightarrow\) \(\mu _{R}(d_i)=\nu _{R}(d_i)\).
- (A3):
-
\(K^{I}_{accy}(R,S)=1\) if \(\mu _{R}(d_i) =\mu _{S}(d_i)=0\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=1\) or \(\mu _{R}(d_i) =\mu _{S}(d_i)=1\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=0\), i.e., R and S both are equal crisp IF-sets.
- (A4):
-
\(K^{I}_{accy}(R,S)=K^A_I(R)\) if \(R=S\), where \(K^A_I(R)\) is the proposed knowledge measure.
Proof
(A1). It is easy to prove this from Eq. (43).
(A2). Let \(K^{I}_{accy}(R,S)=0\),
i.e.,
Since the above summation contains only positive terms, therefore above-mentioned equation is true only if \(\left( \mu _{R}(d_i)-\nu _{R}(d_i)\right) =0\) and \(|\mu _{R}(d_i)-\nu _{R}(d_i)|\times |\mu _{S}(d_i)-\nu _{S}(d_i)|=0, \forall d_i \in D\); which gives \(\mu _{R}(d_i)=\nu _{R}(d_i), \forall d_i \in D\).
Conversely, let us consider \(\mu _{R}(d_i)=\nu _{R}(d_i), \forall d_i \in D\); which clearly implies \(K^{I}_{accy}(R,S)=0\).
(A3). Let R, S are two crisp sets in IFS(D) and are equal. It implies that \(\mu _{R}(d_i) =\mu _{S}(d_i)=0\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=1\) or \(\mu _{R}(d_i) =\mu _{S}(d_i)=1\), \(\nu _{R}(d_i) =\nu _{S}(d_i)=0\). Clearly, \(K^{I}_{accy}(R,S)=1\) from both cases.
(A4). It is simple to demonstrate \(K^{I}_{accy}(R,S)=K^A_I(R)\) for \(R=S\) from definition given in Eq. (43).
Hence, \(K^{I}_{accy}(R,S)\) is a valid IF-accuracy measure. \(\square\)
Theorem 4
For \(R,S,T \in IFS(D)\), then \(K^{I}_{accy}\) satisfy the following properties:
- (1):
-
\(K^{I}_{accy}(R,S \cup T) + K^{I}_{accy}(R,S \cap T) = K^{I}_{accy}(R,S) + K^{I}_{accy}(R,T)\).
- (2):
-
\(K^{I}_{accy}(R \cup S, T) + K^{I}_{accy}(R \cap S, T) = K^{I}_{accy}(R,T) + K^{I}_{accy}(S,T)\).
- (3):
-
\(K^{I}_{accy}(R \cup S, R \cap S) + K^{I}_{accy}(R \cap S, R \cup S) = K^{I}_{accy}(R,S) + K^{I}_{accy}(S,R)\).
- (4):
-
If \(R^c\) and \(S^c\) represents complements of R and S respectively then
- (a):
-
\(K^{I}_{accy}(R,R^c)=K^{I}_{accy}(R^c,R)\).
- (b):
-
\(K^{I}_{accy}(R,S^c)=K^{I}_{accy}(R^c,S)\).
- (c):
-
\(K^{I}_{accy}(R,S)=K^{I}_{accy}(R^c,S^c)\).
- (d):
-
\(K^{I}_{accy}(R,S) + K^{I}_{accy}(R^c,S) = K^{I}_{accy}(R^c,S^c) + K^{I}_{accy}(R,S^c)\).
Proof
Let \(R,S,T \in\) IFS(D) for a non-empty finite set D, are given as follows:
where \(\mu _{R}(d_i),\mu _{S}(d_i),\mu _{T}(d_i)\) are membership functions and \(\nu _{R}(d_i),\nu _{S}(d_i),\nu _{T}(d_i)\) are non-membership functions corresponding to sets R, S, T, respectively.
(1). Consider two sets
Now,
and
On adding Eqs. (44) and (45), we get
(2). Consider two sets
Now,
and
On adding Eqs. (46) and (47), we get
(3). Consider the same two sets
Now,
and
Adding Eqs. (48) and (49), we get
(4). The definition given in Eq. (43) is used as the direct proof for this part. \(\square\)
4.1.1 Application of proposed accuracy measure in pattern detection
Now, the pattern detection issue with IF-set is addressed by the following application of the accuracy measure.
Problem: Let us consider m patterns, represented by IF-sets \(P_j=\left\{ \langle d_i, \mu _{P_j}(d_i), \nu _{P_J}(d_i) \rangle :d_i \in D\right\}\) \((j=1,2,3,\dots ,m)\) defined on a non-empty finite set \(D=\left\{ d_1,d_2,\dots ,d_n\right\}\). Let \(C=\left\{ \langle d_i, \mu _{C}(d_i), \nu _{C}(d_i) \rangle : d_i \in D\right\}\) is any unknown pattern. The goal is to categorize pattern C into one of the recognized patterns \(P_j\).
There are three approaches to finding the solution to the above problem as folows:
-
Similarity measure approach: (Chen et al. 2016b) If S(R,S) represents the similarity between pattern R and S, then C is recognized as pattern \(P_{{\bar{j}}}\), where
$$\begin{aligned} S(C,P_{{\bar{j}}})=\max _{j=1,2,3,\dots ,m} (S(C,P_j)). \end{aligned}$$ -
Dissimilarity measure approach: (Kadian and Kumar 2021) If D(R,S) represents the dissimilarity between pattern R and S, then C is recognized as pattern \(P_{{\bar{j}}}\), where
$$\begin{aligned} D(C,P_{{\bar{j}}})=\min _{j=1,2,3,\dots ,m} (D(C,P_j)). \end{aligned}$$ -
Accuracy measure approach: If A(R,S) represents the accuracy of pattern R from S, then C is recognized as pattern \(P_{{\bar{j}}}\), where
$$\begin{aligned} A(C,P_{{\bar{j}}})=\max _{j=1,2,3,\dots ,m} (A(C,P_j)). \end{aligned}$$
Boran and Akay (2014) investigated pattern detection using similarity measures, whereas Xiao (2019) investigated pattern detection using dissimilarity measures. We notice from the comparative studies of similarity and dissimilarity measures that neither a similarity measure nor a dissimilarity measure is suitable for every problem of pattern detection. Therefore, for issues involving pattern detection, an alternative model is required. In some pattern detection problems, the proposed accuracy measure may work as an improvement over the existing similarity and dissimilarity measures. In the pattern detection issue, we compare the examples from Boran and Akay (2014) and illustrate the usefulness of the proposed IF-accuracy measure.
Example 4
Let us consider a non-empty finite set \(D=\left\{ d_1,d_2,d_3,d_4\right\}\). Let \(A_1,A_2,A_3\) be three patterns defined as follows:
Let the unknown pattern C be defined as follows:
Our current goal is to classify the unknown pattern C as one of the patterns \(A_1,A_2\) or \(A_3\).
Boran and Akay (2014) used a similarity-measure approach to solve this problem of pattern detection. Results are computed in Table 5.
From Table 5, we found that the similarity measures \(S_C\) (Fan and Zhangyan 2001), \(S_{HB}\) (Mitchell 2003), \(S_{HY}^1\) (Hung and Yang 2004), \(S_{HY}^2\) (Hung and Yang 2004) and \(S_{HY}^3\) (Hung and Yang 2004) are not able to recognize the pattern C, but similarity measures \(S_H\) (Hong and Kim 1999), \(S_O\) (Li et al. 2002) and \(S_e^P\) (Liang and Shi 2003) easily recognize the pattern C.
Further, Xiao (2019) used a dissimilarity measure approach to find the solution of the same example. Results are computed in Table 6.
From Table 6, we found that the dissimilarity measures \(l_{eh}\) (Yang and Chiclana 2012), \(l_h\) (Grzegorzewski 2004) and \(d^2_Z\) (Zhang and Yu 2013) are not able to classify pattern C, but dissimilarity measures \(d_E\) (Wang and Xin 2005), \(d^1_Z\) (Zhang and Yu 2013) and \(d_1\) (Wang and Xin 2005) easily classify the pattern C.
Now, we use the accuracy measure approach and apply the proposed accuracy measure to the given patterns. The values calculated are: \(K^{I}_{accy}(C,A_1)=0.2914\), \(K^{I}_{accy}(C,A_2)=0.2406\) and \(K^{I}_{accy}(C,A_3)=0.1932\). Pattern C is categorized into the pattern \(\hbox {A}_1\) using the proposed accuracy measure. As a result, the proposed accuracy measure technique works well for this pattern detection problem.
4.2 IF-information measure
For any IF-set R, we can define an IF-information measure \(E^A_I\) as follows:
We now test the proposed IF-information measure’s validity.
Theorem 5
Let \(R=\left\{ \langle d_i, \mu _{R}(d_i), \nu _{R}(d_i) \rangle : d_i \in D\right\}\) is a member of IFS(D) for a finite set D\(\left( \ne \phi \right)\). Define a mapping \(E^A_I:IFS(D)\) \(\rightarrow\) \(\left[ 0,1\right]\) given in Eq. (50). Then, \(E^A_I\) is a valid IF-information measure if it satisfies the following axioms, (E1)-(E4):
- (E1):
-
\(E^A_I(R)=1\) \(\Leftrightarrow\) \(\mu _{R}(d_i)=\nu _{R}(d_i)\) \(\forall\) \(d_i \in D\), i.e., R is most IF-set.
- (E2):
-
\(E^A_I(R)=0\) \(\Leftrightarrow\) \(\mu _{R}(d_i)=0\), \(\nu _{R}(d_i)=1\) or \(\mu _{R}(d_i)=1\), \(\nu _{R}(d_i)=0\) \(\forall\) \(d_i \in D\), i.e., R is a crisp set.
- (E3):
-
\(E^A_I(R)\) \(\le\) \(E^A_I(S)\) \(\Leftrightarrow\) R \(\subseteq\) S.
- (E4):
-
If \(R^{c}\) represents the complement of R, then \(E^A_I(R)=E^A_I(R^{c})\).
Proof
It is simple to confirm that the information measure given in Eq. (50) adheres to the aforementioned axioms. \(\square\)
4.3 Similarity measure in intuitionistic fuzzy environment
For \(R,S \in\) IFS(D), we can define a similarity measure as follows:
Now we examine the proposed similarity measure’s validity in an intuitionistic fuzzy environment.
Theorem 6
Let \(R,S,T \in\) IFS(D) for a finite set D\(\left( \ne \phi \right)\). Define a mapping \(\Im _m:IFS(D) \times IFS(D)\) \(\rightarrow\) \(\left[ 0,1\right]\) given in Eq. (51). Then, \(\Im _m\) is considered to be an IF-similarity measure if it meets the four axioms (S1)-(S4) listed below:
- (S1):
-
\(0 \le \Im _m(R,S) \le 1\).
- (S2):
-
\(\Im _m(R,S)=\Im _m(S,R)\).
- (S3):
-
\(\Im _m(R,S)=1 \Leftrightarrow R=S\).
- (S4):
-
If \(R \subseteq S \subseteq T\), then \(\Im _m(R,S) \ge \Im _m(R,T)\) and \(\Im _m(S,T) \ge \Im _m(R,T)\).
Proof
We verify the axioms (S1)-(S4) as follows:
- (S1).:
-
Since, we know that values of proposed knowledge measures \(K^A_I(R)\) and \(K^A_I(S)\) lies in [0,1], therefore, \(0 \le |K^A_I(R)-K^A_I(S)| \le 1\), and hence the axiom (S1).
- (S2).:
-
From Eq. (51), we can say that \(\Im _m(R,S)=\Im _m(S,R)\).
- (S3).:
-
From Eq. (51), we have
$$\begin{aligned} \begin{aligned} \Im _m(R,S)=1&\Leftrightarrow 1-|K^A_I(R)-K^A_I(S)|=1,\\&\Leftrightarrow |K^A_I(R)-K^A_I(S)|=0, \\&\Leftrightarrow K^A_I(R)=K^A_I(S), \\&\Leftrightarrow \mu _{R}(d_i)=\mu _{S}(d_i) \text { and } \nu _{R}(d_i)=\nu _{S}(d_i), ~\forall d_i \in D, \\&\Leftrightarrow R=S. \end{aligned} \end{aligned}$$ - (S4).:
-
Let \(R,S,T \in\) IFS(D) be s.t. \(R \subseteq S \subseteq T\),
$$\begin{aligned} \begin{aligned}\Rightarrow & \mu _{R}(d_i) \le \mu _{S}(d_i) \le \mu _{T}(d_i) \text { and } \\ & \nu _{R}(d_i) \ge \nu _{S}(d_i) \ge \nu _{T}(d_i), \text { } \forall d_i \in D, \\ \Rightarrow & K^A_I(R) \ge K^A_I(S) \ge K^A_I(T), \\ \Rightarrow & K^A_I(R)-K^A_I(T) \ge K^A_I(R)-K^A_I(S), \\ \Rightarrow & |K^A_I(R)-K^A_I(T)| \ge |K^A_I(R)-K^A_I(S)|, \\ \Rightarrow & 1- |K^A_I(R)-K^A_I(T)| \le 1-|K^A_I(R)-K^A_I(S)|, \\ \Rightarrow & \Im _m(R,T) \le \Im _m(R,S). \end{aligned} \end{aligned}$$Similarly, we can prove that \(\Im _m(S,T) \ge \Im _m(R,T)\).
\(\square\)
Thus, the measure defined in Eq. (51) is a valid similarity measure. If two IF-sets provide equal knowledge, then the proposed similarity measure attains its maximum value, i.e., 1. This set up the potency of the proposed similarity measure.
Example 5
If D={d} and \(R,S \in\) IFS(D) s.t. \(R= \left\{ d, \mu _{R}(d), \nu _{R}(d) \right\}\) and \(S= \left\{ d, 0.5, 0.5\right\}\), where \(\mu _R\) is the membership and \(\nu _R\) is non membership function, respectively. Thus, Fig. 2 represents the amount of similarity in IF-sets R and S corresponding to different values of \(\mu\) and \(\nu\). From Fig. 2, the following points are easy to understand:
-
Boundedness i.e., \(0 \le \Im _m(R,S) \le 1\).
-
\(\Im _m(R,S)=1\) when \(R=S\).
-
Symmetry i.e., \(\Im _m(R,S)=\Im _m(S,R)\).

Proposed Similarity measure
4.4 Dissimilarity/distance measure in intuitionistic fuzzy environment
For \(R,S \in\) IFS(D), we can define a dissimilarity measure as follows:
Now we examine the proposed dissimilarity measure’s validity in an intuitionistic fuzzy environment.
Theorem 7
Let \(R,S,T \in\) IFS(D) for a finite set D\(\left( \ne \phi \right)\). Define a mapping \(\zeta _m:IFS(D) \times IFS(D)\) \(\rightarrow\) \(\left[ 0,1\right]\) given in Eq. (52). Then, \(\zeta _m\) is considered to be an IF-dissimilarity/distance measure if it meets the four axioms (D1)-(D4) listed as follows:
- (D1):
-
\(0 \le \zeta _m(R,S) \le 1\).
- (D2):
-
\(\zeta _m(R,S)=\zeta _m(S,R)\).
- (D3):
-
\(\zeta _m(R,S)\)=0 \(\Leftrightarrow\) \(R=S\).
- (D4):
-
If \(R \subseteq S \subseteq T\), then \(\zeta _m(R,S) \le \zeta _m(R,T)\) and \(\zeta _m(S,T) \le \zeta _m(R,T)\).
Proof
We verify the axioms (D1)-(D4) as follows:
- (D1).:
-
Since, \(K^A_I(R) \in [0,1] \forall R \in\) IFS(D), therefore, \(0 \le |K^A_I(R)-K^A_I(S)| \le 1\), and hence the axiom (D1).
- (D2).:
-
From Eq. (52), it is easy to say that \(\zeta _m(R,S)=\zeta _m(S,R)\).
- (D3).:
-
From Eq. (52), we have
$$\begin{aligned} \begin{aligned} \zeta _m(R,S)=0&\Leftrightarrow |K^A_I(R)-K^A_I(S)|=0,\\&\Leftrightarrow K^A_I(R)=K^A_I(S), \\&\Leftrightarrow \mu _{R}(d_i)=\mu _{S}(d_i) \text { and } \nu _{R}(d_i)=\nu _{S}(d_i), \text { } \forall d_i \in D, \\&\Leftrightarrow R=S. \end{aligned} \end{aligned}$$ - (S4).:
-
Let \(R,S,T \in\) IFS(D) are s.t. \(R \subseteq S \subseteq T\),
$$\begin{aligned} \begin{aligned}&\Rightarrow \mu _{R}(d_i) \le \mu _{S}(d_i) \le \mu _{T}(d_i) \text { and } \nu _{R}(d_i) \ge \nu _{S}(d_i) \ge \nu _{T}(d_i), \text { } \forall d_i \in D, \\&\Rightarrow K^A_I(R) \ge K^A_I(S) \ge K^A_I(T), \\&\Rightarrow K^A_I(R)-K^A_I(T) \ge K^A_I(R)-K^A_I(S), \\&\Rightarrow |K^A_I(R)-K^A_I(T)| \ge |K^A_I(R)-K^A_I(S)|, \\&\Rightarrow \zeta _m(R,T) \ge \zeta _m(R,S). \end{aligned} \end{aligned}$$Similarly, we can prove that \(\zeta _m(S,T) \le \zeta _m(R,T)\).
\(\square\)
Thus, the measure defined in Eq. (52) is a valid dissimilarity measure. If two IF-sets provide equal knowledge, then the proposed dissimilarity measure attains its minimum value, i.e., 0. This set up the potency of the proposed dissimilarity/distance measure.
Example 6
If D={d} and \(R,S \in\) IFS(D) s.t. \(R= \left\{ d, \mu _{R}(d), \nu _{R}(d) \right\}\) and \(S= \left\{ d, 0.5, 0.5\right\}\), where \(\mu _R\) is the membership and \(\nu _R\) is non membership function, respectively. Thus, Fig. 3 represents the amount of dissimilarity in IF-sets R and S corresponding to different values of \(\mu\) and \(\nu\). From Fig. 3, the following points are easy to understand:
-
Boundedness i.e., \(0 \le \zeta _m(R,S) \le 1\).
-
\(\zeta _m(R,S)=0\) when \(R=S\).
-
Symmetry i.e., \(\zeta _m(R,S)=\zeta _m(S,R)\).

Proposed Dissimilarity measure
5 Proposed intuitionistic fuzzy knowledge, similarity and dissimilarity measure-based modified VIKOR approach
In the present section, applications of the proposed IF-knowledge measure, similarity, and dissimilarity measure are provided in MCDM issues.
In MCDM problems, we try to choose the best alternative out of all those that are accessible. Multiple criteria are used to describe a variety of real-world issues. This model must meet the following requirements:
-
(i).
A group of all the alternatives.
-
(ii).
A defined group of criterions.
-
(iii).
Weights of the defined Attributes/Criteria weights.
-
(iv).
Variables that might change the priority given to each alternative.
5.1 The proposed approach
Opricovic (1998) studied an approach, named VIKOR approach to tackle MCDM issues. In terms of aggregation function and normalizing technique, VIKOR differs from TOPSIS. In the TOPSIS approach, an alternative that is nearer to the positive ideal solution and farthest from the negative ideal solution is chosen as the best alternative (see Chen et al. 2016a). This could prefer to make a choice that maximizes the profit and minimize the cost. Furthermore, in the VIKOR, the precise assessment of “Closeness” to the positive ideal solution is employed to select the best alternative.

Flowchart representing steps of the proposed approach
5.2 Proposed IF-similarity and dissimilarity measure-based modified VIKOR approach
The similarity and dissimilarity-based modified VIKOR technique for the MCDM issue with the IF-knowledge measure may be provided. It is inspired by the traditional VIKOR approach and its extensions. Consider a MCDM issue in which \({\mathcal {M}}_L=\left\{ L_i\right\} _{i=1}^r\) is a collection of all the alternatives and \({\mathcal {M}}_T=\left\{ T_j\right\} _{j=1}^s\) is a collection of criteria. Let \({\mathcal {R}}_P=\left\{ P_d\right\} _{d=1}^n\) is a set of resource persons that are involved to give their opinion for an alternative under certain criteria. Let \({\mathcal {W}}_C=\left\{ c_j\right\} _{j=1}^s\) represent the criteria weight corresponding to the attributes \(T_j\) s.t. \(\sum _{j=1}^{s} c_j =1\). Figure 4 represents the working steps of the proposed approach. The proposed VIKOR approach includes the following steps:
-
Step 1: Create assessment information: We may create the following decision matrix (Table 7) in an intuitionistic fuzzy environment after receiving the resource person’s responses for a criterion of a certain alternative:
Table 7 Decision matrix in Intuitionistic Fuzzy environment \(DM_{r \times s}\) where \(\mu _{ij}\) is the degree with which \(L_i\) alternative satisfy \(T_j\) criteria and \(\nu _{ij}\) is the degree with which \(L_i\) alternative do not satisfy \(T_j\) criteria.
-
Step 2: Compute normalized decision matrix: We can normalize the fuzzy decision matrix as follows
$$\begin{aligned} \begin{aligned} M&= \left\{ m_{ij}\right\} , \\&={\left\{ \begin{array}{ll} \langle \mu _{ij}, \nu _{ij} \rangle &{}\quad \text {Benefit criteria} \\ \langle \nu _{ij}, \mu _{ij} \rangle &{}\quad \text {Cost criteria} \end{array}\right. } \end{aligned} \end{aligned}$$(53)Also, the amount of knowledge passed is estimated by using Eq. (11).
-
Step 3: Compute criteria weights: Criteria weights are calculated by following two approaches:
- (A).:
-
For unknown criteria weights: Chen and Li (2010) provided the following approach for determining the criterion weights:
$$\begin{aligned} c^E_j=\left( 1-FE_{j}\right) /\left( s-\sum _{j=1}^{s}FE_{j}\right) ,\forall j=1,2,\dots ,s; \end{aligned}$$(54)where \(FE_{j}= \sum _{i=1}^{r}E(L_i,T_j)\) \((\forall j=1,2,\dots ,s)\). In this case, \(E(L_i,T_j)\) stands for the fuzzy information measure of the alternative \(L_i\) equivalent to the criteria \(T_j\). Knowing that the ideas of fuzzy information measure and fuzzy knowledge measure complement each other, we apply the following formula to get the criteria weights:
$$\begin{aligned} c^K_{j}=\frac{FK_{ij}}{\sum _{j=1}^{s}FK_{ij}}, \forall j=1,2,\dots ,s; \end{aligned}$$(55)where \(FK_{ij}=\sum _{i=1}^{r} K(L_i,T_j)\) and \(K(L_i,T_j)\) is the knowledge obtained from the alternative \(L_i\) analogous to criteria \(T_j\).
- (B).:
-
For partially known criteria weights: Resource persons may not always be able to offer their opinions in the form of exact statistics in real-world circumstances. This could be as a result of lack of time, inability to understand the issue domain, etc. So, resource persons like to give their opinions in the form of intervals in this sort of difficult circumstance. We compile the information delivered by resource persons in the set \({\bar{I}}\). Also, the total quantity of knowledge is found by the formula given as follows
$$\begin{aligned} FK_{j}= \sum _{i=1}^{r} K(m_{ij}); \end{aligned}$$(56)where
$$\begin{aligned} \begin{aligned} K(m_{ij})&= K^A_I (L_i,T_j), \\&= \frac{{(\sqrt{2}-1)^{-1}} {\left[ \sqrt{1+\left( \mu _{ij}-\nu _{ij}\right) ^2}-1\right] }}{t},\\&\qquad \forall i=1,2,3,\dots ,r,j=1,2,3,\dots ,s. \\ \end{aligned} \end{aligned}$$(57)Thus, optimum criteria weights are calculated as follows
$$\begin{aligned} \begin{aligned} max({\mathcal {F}})&= \sum _{j=1}^{s} (c^K_j)(FK_{j}), \\&= \sum _{j=1}^{s}\left( c^K_j\sum _{i=1}^{r} K(m_{ij})\right) , \\&= \left( \sqrt{2}-1\right) ^{-1} \\&\quad \sum _{i=1}^{r} \sum _{j=1}^{s} \left[ c^K_j\left( \frac{\sqrt{1+\left( \mu _{ij}-\nu _{ij}\right) ^2}-1}{t}\right) \right] ; \end{aligned} \end{aligned}$$(58)where \(c^K_j \in {\bar{I}}\) and \(\sum _{j=1}^{s} c^K_j=1.\)
Hence, the criteria weights obtained by Eq. (58) are given as follows
$$\begin{aligned} \arg \max ({\mathcal {F}})= \left( C_1,C_2,\dots ,C_s\right) ^{{\mathcal {T}}}; \end{aligned}$$(59)where \(^{\mathcal {T}}\) represents the transpose of the matrix.
-
Step 4: Compute Best and Worst ideal solutions: Now, we find the ideal solutions. Let \({\mathcal {B}}=\left\{ {\mathcal {B}}_1,{\mathcal {B}}_2,\dots , {\mathcal {B}}_s\right\}\) and \({\mathcal {W}}=\left\{ {\mathcal {W}}_1,{\mathcal {W}}_2,\dots ,{\mathcal {W}}_s\right\}\) are two sets of best and worst ideal solutions respectively. We can find the values of the best and worst ideal solutions as follows
$$\begin{aligned} {\mathcal {B}}_j= & {} {\left\{ \begin{array}{ll} \langle \max \nolimits _{\{i\}} \mu _{ij}, \min \nolimits _{\{i\}} \nu _{ij} \rangle &{} \text { Benefit criteria} \\ \langle \min \nolimits _{\{i\}} \mu _{ij}, \max \nolimits _{\{i\}} \nu _{ij} \rangle &{} \text { Cost criteria} \end{array}\right. } \end{aligned}$$(60)$$\begin{aligned} {\mathcal {W}}_j= & {} {\left\{ \begin{array}{ll} \langle \min \nolimits _{\{i\}} \mu _{ij}, \max \nolimits _{\{i\}} \nu _{ij} \rangle &{} \text { Benefit criteria} \\ \langle \max \nolimits _{\{i\}} \mu _{ij}, \min \nolimits _{\{i\}} \nu _{ij} \rangle &{} \text { Cost criteria} \end{array}\right. } \end{aligned}$$(61) -
Step 5: Compute best and worst ideal similarity matrices: By using the formula of similarity measure given in Eq. (51), we can find the value of similarity measure of the best ideal solution \({\mathcal {B}}\) and normalized decision matrix M for each attribute, find the value of similarity measure of the worst ideal solution \({\mathcal {W}}\) and normalized decision matrix M for each attribute, and compute the best ideal matrix B and worst ideal matrix W under similarity measure as follows
$$\begin{aligned} B= \left\{ b_{ij}\right\} _{r \times s} \text { and } W= \left\{ w_{ij}\right\} _{r \times s} \end{aligned}$$(62)where \(b_{ij}=\Im _m({\mathcal {B}}_j,m_{ij}), w_{ij}=\Im _m({\mathcal {W}}_j,m_{ij})\).Footnote 2
-
Step 6: Compute similarity measure solutions: We can find the similarity measure solution \(Y^+\) which is nearest to the best ideal solution and similarity measure solution \(Y^-\) which is farthest to the best ideal solution and find the similarity measure solution \(Z^+\) which is nearest to worst ideal solution and similarity measure solution \(Z^-\) which is farthest to worst ideal solution as follows
$$\begin{aligned} \begin{aligned} Y^+=\left\{ y^+_1,y^+_2,\dots ,y^+_s\right\} , Y^-=\left\{ y^-_1,y^-_2,\dots ,y^-_s\right\} ,\\ Z^+=\left\{ z^+_1,z^+_2,\dots ,z^+_s\right\} , Z^-=\left\{ z^-_1,z^-_2,\dots ,z^-_s\right\} ; \end{aligned} \end{aligned}$$(63)where \(y^+_j=\max _{\{i\}}b_{ij}\), \(y^-_j=\min _{\{i\}}b_{ij}\), \(z^+_j=\max _{\{i\}}w_{ij}\), \(z^-_j=\min _{\{i\}}w_{ij}, (j=1,2,3,\dots ,s)\).
-
Step 7: Compute normalized best & worst group utility and individual regret values: We can find the values of normalized nearest best ideal group utility \(\mathcal{B}\mathcal{U}_i\) and normalized nearest best ideal individual regret \(\mathcal{B}\mathcal{R}_i\) as follows
$$\begin{aligned} \mathcal{B}\mathcal{U}_i= & {} \sum _{j=1}^s c^K_j \frac{y^+_j-b_{ij}}{y^+_j-y^-_j},\nonumber \\ \mathcal{B}\mathcal{R}_i= & {} \max _{\{j\}}\left( c^K_j \frac{y^+_j-b_{ij}}{y^+_j-y^-_j}\right) , \forall i=1,2,3,\dots , r. \end{aligned}$$(64)Similarly, we can find the values of normalized nearest worst ideal group utility \(\mathcal{W}\mathcal{U}_i\) and normalized nearest worst ideal individual regret \(\mathcal{W}\mathcal{R}_i\) as follows
$$\begin{aligned} \mathcal{W}\mathcal{U}_i= & {} \sum _{j=1}^s c^K_j \frac{z^+_j-w_{ij}}{z^+_j-z^-_j},\nonumber \\ \mathcal{W}\mathcal{R}_i= & {} \max _{\{j\}}\left( c^K_j \frac{z^+_j-w_{ij}}{z^+_j-z^-_j}\right) , \forall i=1,2,3,\dots , r. \end{aligned}$$(65) -
Step 8: Compute nearest best and worst ideal VIKOR indices: we can find the values of VIKOR indices \({\mathcal {V}}^P_i\) that are nearest to best ideal solutions and VIKOR indices \({\mathcal {V}}^N_i\) that are nearest to worst ideal solutions as follows
$$\begin{aligned} \begin{aligned} {\mathcal {V}}^P_i&= \lambda \frac{\mathcal{B}\mathcal{U}_i-\min _{\{i\}}\mathcal{B}\mathcal{U}_i}{\max _{\{i\}}\mathcal{B}\mathcal{U}_i-\min _{\{i\}}\mathcal{B}\mathcal{U}_i} \\&\quad + (1-\lambda ) \frac{\mathcal{B}\mathcal{R}_i-\min _{\{i\}}\mathcal{B}\mathcal{R}_i}{\max _{\{i\}}\mathcal{B}\mathcal{R}_i-\min _{\{i\}}\mathcal{B}\mathcal{R}_i}, \forall i=1,2,3,\dots , r, \\ {\mathcal {V}}^N_i&= \lambda \frac{\mathcal{W}\mathcal{U}_i-\min _{\{i\}}\mathcal{W}\mathcal{U}_i}{\max _{\{i\}}\mathcal{W}\mathcal{U}_i-\min _{\{i\}}\mathcal{W}\mathcal{U}_i} \\&\quad + (1-\lambda ) \frac{\mathcal{W}\mathcal{R}_i-\min _{\{i\}}\mathcal{W}\mathcal{R}_i}{\max _{\{i\}}\mathcal{W}\mathcal{R}_i-\min _{\{i\}}\mathcal{W}\mathcal{R}_i}, \forall i=1,2,3,\dots , r. \end{aligned} \end{aligned}$$(66)In general, the value of weightage (\(\lambda\)) is used to be 0.5.
-
Step 9: Compute Correlation factor for proximity: We can find the value of correlation factor \({\mathcal {C}}^c_i\) for each alternative \(L_i\) as follows
$$\begin{aligned} {\mathcal {C}}^c_i=\frac{{\mathcal {V}}^P_i}{{\mathcal {V}}^P_i+{\mathcal {V}}^N_i}, \forall i=1,2,3,\dots ,r. \end{aligned}$$(67)After calculating the value of the correlation factor, we arrange the list of correlation factors of each alternative in increasing order. Smaller the value of the correlation factor for an alternative, the better the performance of that alternative.
\({{\textbf {Note:}}}\) Also, if we use the proposed dissimilarity measure in place of the similarity measure, then the greater the value of the correlation factor for an alternative, the better the performance of that alternative.
5.3 Numerical example
University selection for higher education: Take an example of a student looking for the best university for his higher education. After initial scrutiny, a student has shortlisted five universities as alternatives say \(L_1,L_2,L_3,L_4\) and \(L_5\). He has established twelve criteria’s \(T_1,T_2,\dots ,T_{12}\) defined in Table 8. In Fig. 5, a basic framework is given.

Basic framework of MCDM
The student has taken the help of ten resource persons \(P_1,P_2,P_3,\dots , P_{10}\) from various education-related fields to choose the best alternative. Table 9 provides the details about the profession and experiences of the resource persons involved in the proposed MCDM issue. The basic framework of the MCDM issue is shown in Fig. 6.

Framework of the proposed MCDM issue
Now, we solve the given MCDM issue by using the proposed model. There are the following steps involved:
-
Case 1. For unknown criteria weights
-
Step 1: We collect the responses from all the resource persons about a criterion corresponding to a particular alternative. Table 10 provides the details about the responses collected from the resource persons.
Compile the responses supplied by all resource persons, and the resulting decision matrix is displayed in Table 11.
In this matrix, M = \(m_{ij}=\langle \mu _{ij}, \nu _{ij} \rangle\), \(\mu _{ij}\) represents the ratio of total number of all the resource persons that support alternative \(L_i\) w.r.t. criteria \(T_j\) to the total resource persons involved and \(\nu _{ij}\) represents the ratio of total number of all the resource persons that don’t support alternative \(L_i\) w.r.t. criteria \(T_j\) to the total resource persons involved. The amount of knowledge passed by each individual criteria is also provided in Table 11.
-
Step 2: Because all of the criteria involved are benefit criteria, therefore normalized matrix is the same as presented in Table 11.
-
Step 3: The criterion weights are calculated. Let us say that the criterion weights are unknown. Then, by using Eq. (55), we have
$$\begin{aligned} {\mathcal {W}}_C= & {} \left\{ 0.0441,0.0899, 0.0414, 0.1035, 0.0417,\right. \\{} & {} 0.0849, 0.0876, 0.1104, 0.0780, 0.0479, \\{} & {} \left. 0.1202, 0.1504\right\} . \end{aligned}$$ -
Step 4: We can determine the best and worst ideal solutions provided by Eqs. (60) and (61) as given below:
$$\begin{aligned} \begin{aligned} {\mathcal {B}}&=\{ \langle 0.6,0.3 \rangle , \langle 0.7,0.1 \rangle , \langle 0.6,0.3 \rangle , \langle 0.7,0.1 \rangle , \\&\quad \langle 0.6,0.3 \rangle , \langle 0.6,0.2 \rangle , \langle 0.8,0.2 \rangle , \langle 0.7,0.2 \rangle ,\\&\quad \langle 0.6,0.2 \rangle , \langle 0.6,0.2 \rangle , \langle 0.8,0.1 \rangle , \langle 0.7,0.2 \rangle \}.\\ {\mathcal {W}}&=\{ \langle 0.3,0.5 \rangle , \langle 0.3,0.6 \rangle , \langle 0.4,0.5 \rangle , \langle 0.4,0.4 \rangle , \\&\quad \langle 0.3,0.5 \rangle , \langle 0.3,0.5 \rangle , \langle 0.3,0.4 \rangle , \langle 0.3,0.4 \rangle , \\&\quad \langle 0.3,0.6 \rangle , \langle 0.3,0.4 \rangle , \langle 0.4,0.5 \rangle , \langle 0.2,0.5 \rangle \}. \end{aligned} \end{aligned}$$ -
Step 5: Using the Eq. (62), we calculate best ideal matrices \({\mathcal {B}}\) and worst ideal matrices \({\mathcal {W}}\) under similarity measure as follows
$$\begin{aligned} B= \left[ \begin{array}{cccccccccccc} 0.9057 &{} 0.6108 &{} 0.8937 &{} 0.8837 &{} 0.9415 &{} 1 &{} 0.6108 &{} 0.9010 &{} 0.8261 &{} 1 &{} 1 &{} 0.8213 \\ 0.9415 &{} 1 &{} 1 &{} 0.6108 &{} 1 &{} 0.9203 &{} 1 &{} 0.7629 &{} 1 &{} 0.8618 &{} 0.4793 &{} 1 \\ 1 &{} 0.5988 &{} 1 &{} 0.6466 &{} 0.8937 &{} 0.8618 &{} 0.6108 &{} 0.7629 &{} 0.8618 &{} 0.8140 &{} 0.4793 &{} 0.7629 \\ 0.9415 &{} 0.6466 &{} 0.8937 &{} 0.7848 &{} 0.9057 &{} 0.8618 &{} 0.6108 &{} 1 &{} 0.9203 &{} 0.8261 &{} 0.4793 &{} 1 \\ 0.9057 &{} 0.5988 &{} 0.8937 &{} 0.5988 &{} 0.9415 &{} 0.8618 &{} 0.6108 &{} 0.7150 &{} 0.8618 &{} 0.8140 &{} 0.5151 &{} 0.7629 \\ \end{array}\right] \end{aligned}$$and
$$\begin{aligned} W= \left[ \begin{array}{cccccccccccc} 0.9642 &{} 0.9057 &{} 0.9880 &{} 0.7150 &{} 1 &{} 0.8618 &{} 1 &{} 0.8261 &{} 0.9057 &{} 0.8261 &{} 0.4793 &{} 1 \\ 1 &{} 0.7051 &{} 0.9057 &{} 0.9880 &{} 0.9415 &{} 0.9415 &{} 0.6108 &{} 0.9642 &{} 0.9203 &{} 0.9642 &{} 1 &{} 0.8213 \\ 0.9415 &{} 0.8937 &{} 0.9057 &{} 0.9522 &{} 0.9522 &{} 1 &{} 1 &{} 0.9642 &{} 0.9415 &{} 0.9880 &{} 1 &{} 0.9415 \\ 1 &{} 0.9415 &{} 0.9880 &{} 0.8140 &{} 0.9642 &{} 1 &{} 1 &{} 0.7271 &{} 1 &{} 1 &{} 1 &{} 0.8213 \\ 0.9642 &{} 0.8937 &{} 0.9880 &{} 1 &{} 1 &{} 1 &{} 1 &{} 0.9880 &{} 0.9415 &{} 0.9880 &{} 0.9642 &{} 0.9415 \\ \end{array}\right] \end{aligned}$$ -
Step 6: The similarity measure solutions \(Y^+,Y^-,Z^+,Z^-\) can be found by using Eq. (63) and their values are given as below
$$\begin{aligned} \begin{aligned} Y^+&= \left\{ 1,1,1,0.8837, 1, 1, 1,1, 1, 1, 1, 1 \right\} , \\ Y^-&= \left\{ 0.9057, 0.5988, 0.8937, 0.5988, \right. \\&\quad 0.8937, 0.8618, 0.6108, 0.7150, 0.8261, \\&\quad \left. 0.8140, 0.4793, 0.7629 \right\} , \\ Z^+&=\left\{ 1, 0.9415, 0.9880, 1, 1, 1, 1, 0.9880, 1, 1, 1, 1 \right\} , \\ Z^-&=\left\{ 0.9415, 0.7051, 0.9057, 0.7150, \right. \\&\quad 0.9415, 0.8618, 0.6108, 0.7271, 0.9057,\\&\quad \left. 0.8261, 0.4793, 0.8213 \right\} . \end{aligned} \end{aligned}$$ -
Step 7: By using Eq. (64), the calculated values of normalized nearest best ideal group utility \(\mathcal{B}\mathcal{U}_i\) and normalized nearest best ideal individual regret \(\mathcal{B}\mathcal{R}_i\) for each alternative, are shown below
$$\begin{aligned} \begin{aligned} \mathcal{B}\mathcal{U}_1&= 0.5129, \mathcal{B}\mathcal{U}_2 =0.4231, \mathcal{B}\mathcal{U}_3 =0.8626,\\ \mathcal{B}\mathcal{U}_4&=0.5941, \mathcal{B}\mathcal{U}_5 =0.9570; \\ \mathcal{B}\mathcal{R}_1&= 0.1133, \mathcal{B}\mathcal{R}_2 =0.1202, \mathcal{B}\mathcal{R}_3 =0.1504, \\ \mathcal{B}\mathcal{R}_4&= 0.1202, \mathcal{B}\mathcal{R}_5 = 0.1504. \end{aligned} \end{aligned}$$Similarly, by using Eq. (65), the calculated values of normalized nearest worst ideal group utility \(\mathcal{W}\mathcal{U}_i\) and normalized nearest worst ideal individual regret \(\mathcal{W}\mathcal{R}_i\) for each alternative, are shown below
$$\begin{aligned} \begin{aligned} \mathcal{W}\mathcal{U}_1&= 0.5435, \mathcal{W}\mathcal{U}_2 = 0.5372, \mathcal{W}\mathcal{U}_3 = 0.2661, \\ \mathcal{W}\mathcal{U}_4&= 0.3539, \mathcal{W}\mathcal{U}_5 =0.1543; \\ \mathcal{W}\mathcal{R}_1&= 0.1202, \mathcal{W}\mathcal{R}_2 = 0.1504, \mathcal{W}\mathcal{R}_3 = 0.0493, \\ \mathcal{W}\mathcal{R}_4&= 0.1504, \mathcal{W}\mathcal{R}_5 = 0.0493. \end{aligned} \end{aligned}$$ -
Step 8: By using Eq. (66), the values of VIKOR indices \({\mathcal {V}}^P\) and \({\mathcal {V}}^N\) for each alternative, are shown below
$$\begin{aligned} \begin{aligned} {\mathcal {V}}^P_1&= 0.0841, {\mathcal {V}}^P_2 = 0.924, {\mathcal {V}}^P_3 = 0.9116, \\ {\mathcal {V}}^P_4&= 0.2525, {\mathcal {V}}^P_5 = 1, \\ {\mathcal {V}}^N_1&= 0.8505, {\mathcal {V}}^N_2 = 0.9918, {\mathcal {V}}^N_3 = 0.1436, \\ {\mathcal {V}}^N_4&= 0.7564, {\mathcal {V}}^N_5 = 0. \end{aligned} \end{aligned}$$ -
Step 9: From Eq. (67), the calculated values of correlation factors \({\mathcal {C}}^c_i\) for each alternative, are shown below
$$\begin{aligned} {\mathcal {C}}^c_1= & {} 0.09, {\mathcal {C}}^c_2 = 0.0852, {\mathcal {C}}^c_3 = 0.8639, \\ {\mathcal {C}}^c_4= & {} 0.2503, {\mathcal {C}}^c_5 = 1. \end{aligned}$$Fig. 7 represents the graphical representation of the values of correlation factors \({\mathcal {C}}^c_i\) w.r.t. each alternative
We compile the values of nearest best ideal VIKOR indices \({\mathcal {V}}^P_i\), nearest worst ideal VIKOR indices \({\mathcal {V}}^N_i\), correlation factor \({\mathcal {C}}^c_i\) and ranks for each alternative by using proposed similarity measure and proposed dissimilarity measure in Table 12. Figure 8 and Fig. 9 represent these values under similarity measure and dissimilarity measure respectively.
The preference order of the alternatives is given by
$$\begin{aligned} {\left\{ \begin{array}{ll} L_2 \succ L_1 \succ L_4 \succ L_3 \succ L_5 &{} \text {for proposed similarity measure} \\ L_2 \succ L_4 \succ L_1 \succ L_3 \succ L_5 &{} \text {for proposed dissimilarity measure} \end{array}\right. } \end{aligned}$$(68)In both cases, we get \(L_2\) as the most preferable alternative.
Now, we take a sensitivity analysis for the different values of weightage (\(\lambda\)). The value of \(\lambda\) lies between 0 and 1. We take the different values of \(\lambda\) starting from 0 and ending with 1 with step interval 0.1. The values of correlation factor under the proposed similarity measure for different values of \(\lambda\)’s are shown in Table 13 and diagrammatical representation is given in Fig. 10. Further, The values of the correlation factor under the proposed dissimilarity measure for different values of \(\lambda\)’s are shown in Table 14, and diagrammatical representation is given in Fig. 11.
-
-
Case 2. For partially known criteria weights
Resource persons are not in a position to assign criterion weights in the form of numbers since there are so many real-world issues involved. Under these circumstances, intervals are used to distribute the weights of the criterion. Let us have a look at the MCDM issue mentioned above with partially known criterion weights. Let the following details be provided for the weights of the criteria:
$$\begin{aligned} \bar{I}= {\left\{ \begin{array}{ll} 0.02 \le c^K_1 \le 0.06, 0.05 \le c^K_2 \le 0.10, 0.02 \le c^K_3 \le 0.06, 0.08 \le c^K_4 \le 0.12, \\ 0.02 \le c^K_5 \le 0.06, 0.05 \le c^K_6 \le 0.10, 0.05 \le c^K_7 \le 0.10, 0.10 \le c^K_8 \le 0.14, \\ 0.05 \le c^K_9 \le 0.10, 0.02 \le c^K_{10} \le 0.06, 0.10 \le c^K_{11} \le 0.14, 0.13 \le c^K_{12} \le 0.18. \\ \end{array}\right. } \end{aligned}$$(69)The data in Eq. (69) should be interpreted as follow
$$\begin{aligned} \begin{aligned} {\mathcal {F}}_{max}&= 0.0452 c^K_1 + 0.0922 c^K_2 + 0.0425 c^K_3 + 0.1062 c^K_4 + 0.0428 c^K_5 + 0.0871c^K_6 + 0.0899 c^K_7 + 0.1133 c^K_8 \\&\quad + 0.0800 c^K_9 + 0.0492 c^K_{10} + 0.1233 c^K_{11} + 0.1544 c^K_{12}; \\&\quad \text {subjected to conditions} {\left\{ \begin{array}{ll} 0.02 \le c^K_1 \le 0.06, \\ 0.05 \le c^K_2 \le 0.10, \\ 0.02 \le c^K_3 \le 0.06, \\ 0.08 \le c^K_4 \le 0.12, \\ 0.02 \le c^K_5 \le 0.06, \\ 0.05 \le c^K_6 \le 0.10, \\ 0.05 \le c^K_7 \le 0.10, \\ 0.10 \le c^K_8 \le 0.14, \\ 0.05 \le c^K_9 \le 0.10, \\ 0.02 \le c^K_{10} \le 0.06, \\ 0.10 \le c^K_{11} \le 0.14, \\ 0.13 \le c^K_{12} \le 0.18. \\ \sum _{i=1}^{12} c^K_i=1. \end{array}\right. } \end{aligned} \end{aligned}$$(70)Using MATLAB software to solve Eq. (70), the following result is obtained:
$$\begin{aligned} \begin{aligned} c^K_1&=0.06, c^K_2= 0.10, c^K_3= 0.06, c^K_4= 0.1, \\ c^K_5&=0.05, c^K_6=0.08, c^K_7=0.06, c^K_8= 0.1, \\ c^K_9&= 0.1, c^K_{10}= 0.06, c^K_{11}=0.1, c^K_{12}=0.13. \end{aligned} \end{aligned}$$(71)We again acquire \(L_2\) as a more preferred alternative by solving in the same way that case \({\textbf {(}}1)\) was solved.

Correlation factors for proximity for each alternative

Nearest best & worst ideal VIKOR indices, correlation factor and ranks in case of the proposed Similarity measure

Nearest best & worst ideal VIKOR indices, correlation factor and ranks in case of proposed Dissimilarity measure

Sensitive analysis under proposed similarity measure

Sensitive analysis under proposed dissimilarity measure
The aforementioned technique may be used to resolve a variety of MCDM issues that occur in real-world contexts, including the following:
-
(I).
A person wants to pick a restaurant in a city for a party. The selection criteria are (A) Costs, (B) Location, (C) Quality of food, (D) Comfort, and (E) Other services.
-
(II).
A student wishes to pick one of the six offered subjects. Student selection factors include (A) The availability of the teacher, (B) The number of seats available, (C) the Student’s interest in the subject, and (D) the Topic’s future.
-
(III).
A principal wants to choose a teacher for his school. There are the following criteria that the principal created: (A) Education, (B) Experience, (D) Communication skill, (D) Age, (E) Previous record (if any).
-
(IV).
A company wants to develop tourism in India. Some factors might have an impact on it. They are (A) Community interest, (B) Funds availability, (C) Development of infrastructure, and (D) Support of government.
5.4 Comparison and discussion
To test the usefulness of the proposed approach, we solve the example described in Table 11 utilizing other approved methodologies from the literature. Among the popular techniques are as follows:
- \(\checkmark\):
-
Hwang and Yoon (1981) proposed TOPSIS (Technique for Order Preference by Similarity to Ideal Solutions) approach.
- \(\checkmark\):
-
Ye (2010a) proposed Decision-making approach (DMA).
- \(\checkmark\):
-
Verma and Sharma (2014) proposed DMA.
- \(\checkmark\):
-
Singh et al. (2020) proposed DMAs by using three knowledge measures.
- \(\checkmark\):
-
Farhadinia (2020) proposed DMAs by using four knowledge measures.
- \(\checkmark\):
-
Farhadinia (2020) proposed DMA by using knowledge measure studied by Nguyen (2015).
- \(\checkmark\):
-
Farhadinia (2020) proposed DMA by using knowledge measure studied by Guo (2015).
To compare the outcomes of several approaches with the outcomes of the proposed approach in intuitionistic fuzzy environment, we generate Table 15 and Fig. 12.

Comparison of the proposed approach with other known approaches
According to the TOPSIS approach, the best alternative is the one that is the furthest away from the worst solution and closest to the best solution. Opricovic and Tzeng (2004) contrasted the VIKOR approach to the TOPSIS approach, arguing that it is not always correct that the alternative closest to the best solution is likewise the alternative farthest from the worst solution. Ye (2010a) merely took into account the relationships between alternatives and the optimal alternative. In certain specific situations, being close to the optimum answer may be advantageous, but not always, as this might result in the loss of crucial information. As a result, the output suggested by Ye (2010a) technique is not particularly trustworthy. Verma and Sharma (2014) developed an approach to solve MCDM issues in an intuitionistic fuzzy environment based on the weighted intuitionistic fuzzy inaccuracy measure. Singh et al. (2020) gave an approach to tackle MCDM issues by utilizing three different knowledge measures. Farhadinia (2020) gave an approach to finding the solution to the MCDM issue by using four different measures. He also uses the measures proposed by Nguyen (2015) and Guo (2015) to solve the same MCDM issue. The proposed problem suggests five different alternatives out of which the \(L_2\) alternative is the best alternative by all given approaches as suggested by Table 15. As a result, the output of the proposed approach is trustworthy.
6 Conclusion
In this study, an IF-knowledge measure is suggested and is checked for validation. The IF-knowledge measure proposed in this work is found to be an effective option for handling problems with structured linguistic variables, the calculation of ambiguity for two different IF-sets, and the computation of objective weights. To show the efficacy of the proposed IF-knowledge measure, its comparison with several well-known IF-information and knowledge measures is taken. Three examples are provided in the current study to evaluate the efficacy of the proposed IF-knowledge measure. In addition, four new measures are proposed and validated namely accuracy measure, information measure, Similarity measure, and Dissimilarity measure in intuitionistic fuzzy environment. We use the proposed IF-accuracy measures in pattern detection. Also, an example of pattern detection is given to compare the performance of some other measures with the proposed accuracy measure. To tackle MCDM issues, proposed knowledge measure, similarity measure, and dissimilarity measure based modified VIKOR approach based is proposed, and it is discovered that the results were quite encouraging. To illustrate its efficacy, a numerical example with a comparison is given. The proposed approach has great promise since it can find the best alternative that almost perfectly meets all the criteria. It also gives professionals advice on what factors make a particular alternative less successful. Further, the proposed approaches make it simple to see why some alternatives are preferable to others in terms of making decisions. The proposed approach does not require more complex calculations and may be assessed and used for a wide range of intuitionistic fuzzy scenarios. Hesitant Fuzzy set; Interval-valued Intuitionistic Fuzzy set; Picture Fuzzy set; and Neutrosophic Fuzzy set are all included in the scope of expansion of the proposed measure. The suggested knowledge, accuracy, similarity, and dissimilarity measures may be applied to many areas including feature recognition, voice recognition, and image thresholding.
Data availability
The manuscript contains all of the data that were examined throughout this study.
Notes
Vlsekriterijumska Optimizacija I Kompromisno Resenje.
If we use the proposed dissimilarity measure then \(b_{ij}=\zeta _m({\mathcal {B}}_j,m_{ij}), w_{ij}=\zeta _m({\mathcal {W}}_j,m_{ij})\).
References
Arya V, Kumar S (2021) Knowledge measure and entropy: a complementary concept in fuzzy theory. Gran Comput 6(3):631–643. https://doi.org/10.1007/s41066-020-00221-7
Atanassov KT (1986) Intutionistic fuzzy sets. Fuzzy Sets Syst 20:87–96. https://doi.org/10.1007/978-3-7908-1870-3_1
Bajaj RK, Kumar T, Gupta N (2012) R-norm intuitionistic fuzzy information measures and its computational applications. Proceedings of International Conference on Eco-friendly Computing and Communication System-2012 (ICECCS-12), 372–380. https://doi.org/10.1007/978-3-642-32112-2_43
Boekee DE, Vander Lubbe JCA (1980) The R-norm information measure. Inf Control 45(2):136–155. https://doi.org/10.1016/S0019-9958(80)90292-2
Boran FE, Akay D (2014) A biparametric similarity measure on intuitionistic fuzzy sets with applications to pattern recognition. Inf Sci 255:45–57. https://doi.org/10.1016/j.ins.2013.08.013
Burillo P, Bustince H (1996) Entropy on intuitionistic fuzzy sets and on interval-valued fuzzy sets. Fuzzy Sets Syst 78(3):305–316. https://doi.org/10.1016/0165-0114(96)84611-2
Bustince A et al (2015) A historical account of types of fuzzy sets and their relationships. IEEE Trans Fuzzy Syst 24(1):179–194. https://doi.org/10.1109/TFUZZ.2015.2451692
Bustince H (2000) Indicator of inclusion grade for interval-valued fuzzy sets. Application to approximate reasoning based on interval-valued fuzzy sets. Int J Approxi Reason 23(3):137–209. https://doi.org/10.1016/S0888-613X(99)00045-6
Chang TH (2014) Fuzzy VIKOR method: a case study of the hospital service evaluation in Taiwan. Inf Sci 271:196–212. https://doi.org/10.1016/j.ins.2014.02.118
Chen SM, Chang CH (2015) A novel Similarity measure between Atanassov’s intuitionistic fuzzy sets based on transformation techniques with applications to pattern recognition. Inf Sci 291:96–114. https://doi.org/10.1016/j.ins.2014.07.033
Chen SM, Chang CH (2016) Fuzzy multiattribute decision making based on transformation techniques of intuitionistic fuzzy values and intuitionistic fuzzy geometric averaging operators. Inf Sci 352:133–149. https://doi.org/10.1016/j.ins.2016.02.049
Chen SM, Cheng SH, Lan TC (2016) Multicriteria decision making based on the TOPSIS method and similarity measures between intuitionistic fuzzy values. Inf Sci 367:279–295. https://doi.org/10.1016/j.ins.2016.05.044
Chen SM, Cheng SH, Lan TC (2016) A novel similarity measure between intuitionistic fuzzy sets based on the centroid points of transformed fuzzy numbers with applications to pattern recognition. Inf Sci 343:15–40. https://doi.org/10.1016/j.ins.2016.01.040
Chen T, Li C (2010) Determining objective weights with intutionistic fuzzy entropy measures: a comparative analysis. Inf Sci 180(21):4207–4222. https://doi.org/10.1016/j.ins.2010.07.009
Chu ATW, Kalaba RE, Spingarn K (1979) A comparison of two methods for determining the weights of belonging to fuzzy sets. J Optim Theory Appl 27:531–538. https://doi.org/10.1007/BF00933438
Couso I, Bustince H (2018) From fuzzy sets to interval-valued and Atanassov intuitionistic fuzzy sets: A unified view of different axiomatic measures. IEEE Trans Fuzzy Syst 27(2):362–371. https://doi.org/10.1109/TFUZZ.2018.2855654
Das S, Dutta B, Guha D (2016) Weight computation of criteria in a decision-making problem by knowledge measure with intuitionistic fuzzy set and interval-valued intuitionistic fuzzy set. Soft Comput 20(9):3421–3442. https://doi.org/10.1007/s00500-015-1813-3
Das S, Guha D, Mesiar R (2017) Information measures in the intuitionistic fuzzy framework and their relationships. IEEE Trans Fuzzy Syst 26(3):1626–1637. https://doi.org/10.1109/TFUZZ.2017.2738603
De SK, Biswas R, Roy AR (2000) Some operations on intuitionistic fuzzy sets. Fuzzy Sets Syst 114(3):477–484. https://doi.org/10.1016/S0165-0114(98)00191-2
Diakoulaki D, Mavrotas G, Papayannakis L (1995) Determining objective weights in multiple criteria problems: the critic method. Comput Oper Res 22(7):763–770. https://doi.org/10.1016/0305-0548(94)00059-H
Dutta P, Saikia B (2021) Arithmetic operations on normal semi elliptic intuitionistic fuzzy numbers and their application in decision-making. Gran Comput 6:163–179. https://doi.org/10.1007/s41066-019-00175-5
Fan J (2002) Some new fuzzy entropy formulas. Fuzzy Sets Syst 128(2):277–284. https://doi.org/10.1016/S0165-0114(01)00127-0
Fan L, Zhangyan X (2001) Similarity measures between vague sets. J Softw 12(6):922–927
Farhadinia B (2020) A cognitively inspired knowledge-based decision-making methodology employing intuitionistic fuzzy sets. Cogn Comput 12(3):667–678. https://doi.org/10.1007/s12559-019-09702-7
Garg H (2019) Generalized intuitionistic fuzzy entropy-based approach for solving multi-attribute decision-making problems with unknown attribute weights. Proc Natl Acad Sci India Sect A 89(1):129–139. https://doi.org/10.1007/s40010-017-0395-0
Garg H, Kaur J (2018) A novel (R, S)-norm entropy measure of intuitionistic fuzzy sets and its applications in multi-attribute decision-making. Mathematics 6(6):92. https://doi.org/10.3390/math6060092
Ginevičius R, Podvezko V (2005) Objective and Subjective approaches to determining the criterion weight in multicriteria models. Transp Telecommun 6(1):133–137
Gomes LFAM, Lima MMPP (1991) TODIM: Basic and application to multicriteria ranking of projects with environmental impacts. Found Comput Decis Sci 16(3):113–127
Grzegorzewski P (2004) Distances between intuitionistic fuzzy sets and/or interval-valued fuzzy sets based on the Hausdorff metric. Fuzzy Sets Syst 148(2):319–328. https://doi.org/10.1016/j.fss.2003.08.005
Guo K (2015) Knowledge measure for Atanassov’s intuitionistic fuzzy sets. IEEE Trans Fuzzy Syst 24(5):1072–1078. https://doi.org/10.1109/TFUZZ.2015.2501434
Gupta P, Mehlawat MK, Grover N (2016) Intuitionistic fuzzy multi-attribute group decision-making with an application to plant location selection based on a new extended VIKOR method. Inf Sci 370:184–203. https://doi.org/10.1016/j.ins.2016.07.058
Gupta R, Kumar S (2022) Intuitionistic fuzzy scale-invariant entropy with correlation coefficients-based VIKOR approach for multi-criteria decision-making. Gran Comput 7(1):77–93. https://doi.org/10.1007/s41066-020-00252-0
Havdra JH, Charvat F (1967) Quantification method classification process: concept of structural \(\alpha\)-entropy. Kybernetika 3:30–35
Hong DH, Kim C (1999) A note on similarity measures between vague sets and between elements. Inf Sci 115(1–4):83–96. https://doi.org/10.1016/S0020-0255(98)10083-X
Hooda DS (2004) On generalized measures of fuzzy entropy. Math Slovaca 54(3):315–325
Hu J, Zhang X, Yang Y, Liu Y, Chen X (2020) New doctors ranking system based on VIKOR method. Int Trans Oper Res 27(2):1236–1261. https://doi.org/10.1111/itor.12569
Hung WL, Yang MS (2004) Similarity measures of intuitionistic fuzzy sets based on Hausdorff distance. Pattern Recogn Lett 25(14):1603–1611. https://doi.org/10.1016/j.patrec.2004.06.006
Hung WL, Yang MS (2006) Fuzzy entropy on intuitionistic fuzzy sets. Int J Intell Syst 21(4):443–451. https://doi.org/10.1002/int.20131
Hwang CL, Yoon KP (1981) Multiple attribute decision-making: methods and applications. Springer, Berlin. https://doi.org/10.1007/978-3-642-48318-9
Joshi R (2023) Multi-criteria decision making based on novel fuzzy knowledge measures. Gran Comput 8(2):253–270. https://doi.org/10.1007/s41066-022-00329-y
Joshi R, Kumar S (2018) An exponential Jensen fuzzy divergence measure with applications in multiple attribute decision-making. Math Probl Eng. https://doi.org/10.1155/2018/4342098
Kadian R, Kumar S (2021) A novel intuitionistic Renyi’s-Tsallis discriminant information measure and its applications in decision-making. Gran Comput 6(4):901–913. https://doi.org/10.1007/s41066-020-00237-z
Kumar S (2009) Some more results on R-norm information measure. Tamkang J Math 40(1):41–58. https://doi.org/10.5556/j.tkjm.40.2009.35
Kumar S, Choudhary A, Kumar R (2014) Some more results on a generalized parametric R-norm information measure of type \(\alpha\). J Appl Sci Eng 17(4):447–453. https://doi.org/10.6180/jase.2014.17.4.12
Li J, Deng G, Li H, Zeng W (2012) The relationship between similarity measure and entropy of intuitionistic fuzzy sets. Inf Sci 188:314–321. https://doi.org/10.1016/j.ins.2011.11.021
Li Y, Zhongxian C, Degin Y (2002) Similarity measures between vague sets and vague entropy. J Comput Sci 29(12):129–132
Liang Z, Shi P (2003) Similarity measures on intuitionistic fuzzy sets. Pattern Recogn Lett 24(15):2687–2693. https://doi.org/10.1016/S0167-8655(03)00111-9
Luca AD, Termini S (1972) A definition of a Nonprobabilistic entropy in the setting of fuzzy sets theory. Inf Control 20:301–312. https://doi.org/10.1016/S0019-9958(72)90199-4
Mareschal B, Brans P Vincke P (1984) Promethee: a new family of outranking methods in multicriteria analysis. Technical report, Universite Libre de Bruxelles
Mitchell HB (2003) On the Dengfeng–Chuntian similarity measure and its application to pattern recognition. Pattern Recogn Lett 24(16):3101–3104. https://doi.org/10.1016/S0167-8655(03)00169-7
Nguyen H (2015) A new knowledge-based measure for Intuitionistic fuzzy sets and its application in multiple attribute group decision making. Expert Syst Appl 42(22):8766–8774. https://doi.org/10.1016/j.eswa.2015.07.030
Odu GO (2019) Weighting methods for multi-criteria decision making technique. J Appl Sci Environ Manag 23(8):1449–1457. https://doi.org/10.4314/jasem.v23i8.7
Ohlan A (2022) Novel entropy and distance measures for interval-valued intuitionistic fuzzy sets with application in multi-criteria group decision-making. Int J Gen Syst 51(4):413–440. https://doi.org/10.1080/03081079.2022.2036138
Opricovic S (1998) Multicriteria optimization of civil engineering systems. Faculty of civil engineering, Belgrade 2(1):5–21
Opricovic S, Tzeng GH (2004) Decision aiding compromise solution by MCDM methods: a comparative analysis of VIKOR and TOPSIS. Eur J Oper Res 156(2):445–455. https://doi.org/10.1016/S0377-2217(03)00020-1
Pal A et al (2013) Uncertainties with Atanassov’s intuitionistic fuzzy sets: fuzziness and lack of knowledge. Inf Sci 228:61–74. https://doi.org/10.1016/j.ins.2012.11.016
Papakostas GA, Hatzimichailidis AG, Kaburlasos VG (2013) Distance and similarity measures between intuitionistic fuzzy sets: A comparative analysis from a pattern recognition point of view. Pattern Recogn Lett 34(14):1609–1622. https://doi.org/10.1016/j.patrec.2013.05.015
Ravichandran KS et al (2020) A novel extension to VIKOR method under intuitionistic fuzzy context for solving personnel selection problem. Soft Comput 24:1063–1081. https://doi.org/10.1007/s00500-019-03943-2
Rényi A (1961) On measures of entropy and information. In: Proceedings of the 4th Berkeley symposium on mathematical statistics and probability 1:547–561
Rostamzadeh R, Govindan K, Esmaeili A, Sabaghi M (2015) Application of fuzzy VIKOR for evaluation of green supply chain management practices. Ecol Ind 49:188–203. https://doi.org/10.1016/j.ecolind.2014.09.045
Sanayei A, Mousavi SF, Yazdankhah A (2010) Group decision making process for supplier selection with VIKOR under fuzzy environment. Expert Syst Appl 37(1):24–30. https://doi.org/10.1016/j.eswa.2009.04.063
Shannon CE (1948) A mathematical theory of communication. Bell Syst Tech J 27(3):379–423. https://doi.org/10.1002/j.1538-7305.1948.tb01338.x
Shemshadi A, Shirazi H, Toreihi M, Tarokh MJ (2011) A fuzzy VIKOR method for supplier selection based on entropy measure for objective weighting. Expert Syst Appl 38(10):12160–12167. https://doi.org/10.1016/j.eswa.2011.03.027
Singh S et al (2020) On some knowledge measures of intuitionistic fuzzy sets of type two with application to MCDM. Cybern Inf Technol 20(1):3–20. https://doi.org/10.2478/cait-2020-0001
Singh A, Kumar S (2023) Novel fuzzy knowledge and accuracy measures with its applications in multi-criteria decision-making. Gran Comput. https://doi.org/10.1007/s41066-023-00374-1
Singh S, Lalotra S, Sharma S (2019) Dual concepts in fuzzy theory: entropy and Knowledge measure. Int J Intell Syst 34(5):1034–1059. https://doi.org/10.1002/int.22085
Song A et al (2017) Uncertainty measure for Atanassov’s intuitionistic fuzzy sets. Appl Intell 46(4):757–774. https://doi.org/10.1007/s10489-016-0863-2
Szmidt E, Kacprzyk J (1998) A fuzzy set corresponding to an intuitionistic fuzzy set. Int J Uncertain Fuzz Knowl-Based Syst 6(05):427–435. https://doi.org/10.1142/S0218488598000343
Szmidt E, Kacprzyk J (2001) Entropy for intuitionistic fuzzy sets. Fuzzy Sets Syst 118(3):467–477. https://doi.org/10.1016/S0165-0114(98)00402-3
Szmidt E, Kacprzyk J, Bujnowski P (2014) How to measure the amount of knowledge conveyed by Atanassov’s intuitionistic fuzzy sets. Inf Sci 257:276–285. https://doi.org/10.1016/j.ins.2012.12.046
Szmidt E, Kacprzyk J, Bujnowski P (2014) How to measure the amount of knowledge conveyed by Atanassov’s intuitionistic fuzzy sets. Inf Sci 257:276–285. https://doi.org/10.1016/j.ins.2012.12.046
Tsallis C (1988) Possible generalization of Boltzman–Gibbs statistics. J Stat Phys 52(1):479–487. https://doi.org/10.1007/BF01016429
Verma R, Sharma BD (2011) A measure of inaccuracy between two fuzzy sets. Cybern Inform Technol 11(2):13–23
Verma R, Sharma BD (2014) A new measure of inaccuracy with its application to multi-criteria decision making under intuitionistic fuzzy environment. J Intell Fuzzy Syst 27(4):1811–1824. https://doi.org/10.3233/IFS-141148
Wan SP, Wang QY, Dong JY (2013) The extended VIKOR method for multi-attribute group decision making with triangular intuitionistic fuzzy numbers. Knowl-Based Syst 52:65–77. https://doi.org/10.1016/j.knosys.2013.06.019
Wang TC, Chang TH (2005) Fuzzy VIKOR as a resolution for multicriteria group decision-making. In: The 11th International Conference on Industrial Engineering and Engineering Management, pp 352–356. https://doi.org/10.1109/ICSSSM.2006.320751
Wang W, Xin X (2005) Distance measure between intuitionistic fuzzy sets. Pattern Recogn Lett 26:2063–2069. https://doi.org/10.1016/j.patrec.2005.03.018
Xia M, Xu Z (2012) Entropy/cross entropy-based group decision making under intuitionistic fuzzy environment. Inf Fus 13(1):31–47. https://doi.org/10.1016/j.inffus.2010.12.001
Xiao F (2019) Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf Fus 46:23–32. https://doi.org/10.1016/j.inffus.2018.04.003
Yager RR (2020) Decision-making with measure modeled uncertain payoffs and multiple goals. Gran Comput 5(2):149–154. https://doi.org/10.1007/s41066-019-00203-4
Yang Y, Chiclana F (2012) Consistency of 2D and 3D distances of intuitionistic fuzzy sets. Expert Syst Appl 39(10):8665–8670. https://doi.org/10.1016/j.eswa.2012.01.199
Ye J (2010) Fuzzy dcision-making method based on the weighted correlation coefficient under intutionistic fuzzy enviornment. Eur J Oper Res 205(1):202–204. https://doi.org/10.1016/j.ejor.2010.01.019
Ye J (2010) Fuzzy decision-making method based on the weighted correlation coefficient under intuitionistic fuzzy environment. Eur J Oper Res 205(1):202–204. https://doi.org/10.1016/j.ejor.2010.01.019
Zadeh LA (1965) Fuzzy sets. Inf Control 8(3):338–353. https://doi.org/10.1016/S0019-9958(65)90241-X
Zadeh LA (1968) Probability measures of fuzzy events. J Math Anal Appl 23(2):421–427. https://doi.org/10.1016/0022-247X(68)90078-4
Zeng S, Chen SM, Kuo LW (2019) Multiattribute decision making based on novel score function of intuitionistic fuzzy values and modified VIKOR method. Inf Sci 488:76–92. https://doi.org/10.1016/j.ins.2019.03.018
Zeng W, Li H (2006) Relationship between similarity measure and entropy of interval valued fuzzy sets. Fuzzy Sets Syst 157(11):1477–1484. https://doi.org/10.1016/j.fss.2005.11.020
Zhang H, Yu L (2013) New distance measures between intuitionistic fuzzy sets and interval-valued fuzzy sets. Inf Sci 245:181–196. https://doi.org/10.1016/j.ins.2013.04.040
Zhang QS, Jiang SY (2008) A note on information entropy measures for vague sets and its applications. Inf Sci 178(21):4184–4191. https://doi.org/10.1016/j.ins.2008.07.003
Zoraghi A et al (2013) A fuzzy MCDM model with objective and subjective weights for evaluating service quality in hotel industries. J Ind Eng Int 9(1):1–13. https://doi.org/10.1186/2251-712X-9-38
Author information
Authors and Affiliations
Contributions
AS: Conceptualization, Formal analysis, Investigation, Methodology, Software, Validation, Visualization, Writing—original draft, Writing—review & editing. SK: Conceptualization, Data curation, Investigation, Project administration, Supervision.
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Singh, A., Kumar, S. Intuitionistic fuzzy entropy-based knowledge and accuracy measure with its applications in extended VIKOR approach for solving multi-criteria decision-making. Granul. Comput. 8, 1609–1643 (2023). https://doi.org/10.1007/s41066-023-00386-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41066-023-00386-x