
Abstract
In this paper, an adaptive fuzzy backstepping output feedback dynamic surface control (DSC) approach is developed for a class of multiinput and multioutput (MIMO) stochastic nonlinear systems with immeasurable states. Fuzzy logic systems are firstly utilized to approximate the unknown nonlinear functions, and then a fuzzy state observer is designed to estimate the immeasurable states. By combining adaptive backstepping technique and dynamic surface control (DSC) technique, an adaptive fuzzy output feedback backstepping DSC approach is developed. The proposed control method not only overcomes the problem of “explosion of complexity” inherent in the backstepping design methods, but also the problem of the immeasurable states. It is proved that all the signals of the closed-loop adaptive control stochastic system are semiglobally uniformly ultimately bounded (SUUB) in probability, and the observer errors and the output of the system converge to a small neighborhood of the origin. Simulation results are provided to show the effectiveness of the proposed approach.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, many approximation-based adaptive backstepping control approaches have been developed to deal with uncertain nonlinear strict-feedback systems via fuzzy-logic-systems (FLSs) or neural-networks (NNs) approximators; see, for example, [1–16] and references herein. Adaptive fuzzy or Neural network backstepping control approaches in [1–10] are for single-input and single-output (SISO) nonlinear systems, and in [11, 12] are for multiple-input and multiple-output (MIMO) nonlinear systems, while those in [13–16] are for SISO/MIMO nonlinear systems with immeasurable states. Adaptive fuzzy or neural network backstepping control approaches can provide a systematic methodology of solving tracking or regulation control problems for a larger of unknown nonlinear systems, where FLSs or NNs are used to approximate unknown nonlinear functions, and the backstepping design technique is applied to construct adaptive controllers and the adaptation adjusted laws of the parameters. Two of the main features of these adaptive approaches are (i) they can be used to deal with those nonlinear systems without satisfying the matching conditions, and (ii) they do not require the unknown nonlinear functions being linearly parameterized. Therefore, the approximator-based adaptive fuzzy or neural network backstepping control becomes one of the most popular design approaches to a large class of uncertain nonlinear systems.
Despite that many developments have been achieved for the adaptive backstepping control of uncertain nonlinear strict-feedback systems using FLSs or NNs, the mentioned above adaptive control approaches are only applied to the deterministic nonlinear strict-feedback systems without stochastic disturbances. It is well known that stochastic disturbances often exist in many practical systems. Their existence is a source of instability of the control systems, thus, the investigations on stochastic systems modeling and control have received considerable attention in recent years [17]. Authors in [18] first proposed an adaptive backstepping control design approach for strict-feedback stochastic systems by a risk-sensitive cost criterion. Authors in [19] solved the output feedback stabilization problem of strict-feedback stochastic nonlinear systems by using the quartic Lyapunov function, while authors in [20] and [21] developed backstepping control design approaches for nonlinear stochastic systems with Markovian switching. Meanwhile, by using the linear reduced-order state observer, several different output-feedback controllers are developed in [22–24] for strict-feedback nonlinear stochastic systems with unmeasured states. However, these schemes are only suitable for those nonlinear stochastic systems with nonlinear dynamics models known exactly or with the unknown parameters appearing linearly with respect to known nonlinear functions.
To handle the above the problems, authors in [25] and [26] first developed adaptive output feedback control approaches for a class of uncertain nonlinear stochastic systems by using neural networks and the stability proofs of the control systems are given on the stochastic stability theory [27]. Afterward, authors in [28] extended the results of [25] and [26] to a class of uncertain large-scale nonlinear stochastic systems and developed adaptive NN decentralized output feedback control schemes. The adaptive NN backstepping control approaches in [25, 26], and [28] can control a class of nonlinear stochastic systems with immeasurable states, however, the nonlinear uncertainties in the nonlinear stochastic systems are only the functions of the system output, not related with the other states variables. Moreover, the mentioned above approaches are only limited to those SISO or large-scale nonlinear stochastic systems. To our best knowledge, to date, there are few results on MIMO stochastic nonlinear systems with immeasurable states.
Motivated by the above observations, in this paper, an observer-based adaptive fuzzy backstepping output feedback DSC approach is proposed for a class of MIMO stochastic nonlinear strict-feedback systems. In the design, the FLSs are first used to approximate the unknown functions, and a nonlinear fuzzy state observer is designed to estimate the unmeasured states. Combining the adaptive backstepping design along with the DSC technique, an observer-based adaptive fuzzy backstepping control approach is developed. It is proved that this control approach can guarantee that all the signals of the closed-loop system are semiglobally uniformly ultimately bounded (SUUB) in probability, and the observer errors and the output of the system converge to a small neighborhood of the origin by appropriate choice of the design parameters. Compared with the existing results, the main advantages of the proposed control schemes are as follows: (i) by designing a fuzzy nonlinear state observer, the proposed adaptive control method does not require that all the states of the system are measured directly. Meanwhile, the designed state observer can achieve the better estimation results for the unmeasured states than the linear reduced-order state observer in [25, 26, 28]. (ii) DSC technique is incorporated in adaptive fuzzy backstepping control design, thus the proposed adaptive control method can overcome the problem of “explosion of complexity” inherent in the methods of [25, 26, 28].
2 Problem formulation and some preliminaries
2.1 Problem formulation
Consider the following MIMO uncertain strict-feedback stochastic nonlinear system

where \(\underline{x}_{j,i_{j}} = (x_{j,1}, \ldots,x_{j,i_{j}})^{T} \in R^{i_{j}}\), i j =1,2,…,m j is the state vector for the first i j differential equations of the jth subsystem, u j and y j are the input and output of the first j subsystems. \(f_{j,i_{j}}( \cdot) \) is an unknown smooth nonlinear function. \(X = (x_{1}^{T}, \ldots,x_{n}^{T})^{T} \) with \(x_{j} = (x_{j,1},\ldots,x_{j,m_{j}})^{T}\). w is an independent r-dimensional standard Wiener process. In this paper, it is assumed that the only output variable y j =x j,1 is available for measurement.
Assumption 1
\(\phi_{j,i_{j}}(\underline{x}_{j,i_{j}}) =g_{j,i_{j}}(y_{j})\), where \(g_{j,i_{j}}(y_{j})\) is a smooth function satisfying locally Lipschitz condition.
Write (1) in the state space form

where

Choose vector K j such that matrix A j is a strict Hurwitz, therefore, given \(Q_{j} = Q_{j}^{T} > 0\), there exists a positive definite matrix \(P_{j} = P_{j}^{T} \) such that
Control objective: Using fuzzy logic systems to determine an output feedback controller and parameters adaptive laws such that all the signals involved in the closed-loop system are SUUB in probability and the observer errors and the output of the system are as small as the desired.
2.2 Stochastic system and stability
To establish stochastic stability as preliminary, we consider the following stochastic nonlinear system:
where χ∈R n is the state, ω is an r-dimensional independent standard Wiener process, and f(⋅):R n→R n and g(⋅):R n→R n×r are locally Lipschitz and satisfy f(0)=0, g(0)=0.
Define a differential operator ℓ for twice continuously differentiable function V(χ) as follows:
Recall two stability notions for nonlinear stochastic system (4).
Definition 1
[27]
Consider system (4) with f(0)=0 and g(0)=0. The solution χ(t)=0 is said to be asymptotically stable in the large if for any ε>0,
And for any initial condition χ(0),
Definition 2
[27]
The solution process {χ(t),t≥0} of stochastic differential system (4) is said to be bounded in probability, if
Lemma 1
Consider the stochastic nonlinear system (4). If there exists a positive definite, radially unbounded, twice continuously differentiable Lyapunov V:R n→R, and constants ρ>0 and μ≥0, such that
then the following conclusions are true:
-
(1)
the system has a unique solution almost surely;
-
(2)
the system is bounded in probability;
-
(3)
in addition, if f(0)=0 and g(0)=0 and μ=0. Then the system is asymptotically stable in the large.
Lemma 2
(Young’s inequality)
For any vectors x,y∈R n, there is inequality, \(x^{T}y \le\frac{a^{p}}{p}\Vert x \Vert^{p} +\frac{1}{qa^{q}}\Vert y \Vert^{q}\), where a>0,p>1,q>1, and (p−1)(q−1)=1.
2.3 Fuzzy logic systems
A FLS consists of four parts: the knowledge base, the fuzzifier, the fuzzy inference engine, and the defuzzifier. The knowledge base is composed of a collection of fuzzy. If-then rules of the following form:

where x=(x 1,x 2,…,x n )T and y are FLS input and output, respectively, \(\mu_{F_{i}^{l}}(x_{i})\) and \(\mu_{G^{l}}(y) \) are the membership function of fuzzy sets \(F_{i}^{l}\) and G l,N is the number of inference rules.
Through singleton fuzzifier, center average defuzzification and product inference [29], the FLS can be expressed as
where \(\bar{y}_{l} = \max_{y \in R}\mu_{G^{l}}(y)\).
Define the fuzzy basis functions as
Denoting \(\theta^{T} = [ \bar{y}_{1},\bar{y}_{2}, \ldots,\bar{y}_{N} ] =[ \theta_{1},\theta_{2}, \ldots,\theta_{N} ]\) and φ(x)=[φ 1(x),φ 2(x),…,φ N (x)]T, then fuzzy logic system (8) can be rewritten as
Lemma 3
[29]
Let f(x) be a continuous function defined on a compact set Ω. Then for any constant ε>0, there exists a fuzzy logic system (10) such as
By Lemma 3, we can assume that the nonlinear functions in (1) can be approximated by the following fuzzy logic systems as

where 1≤j≤n,i j =1,2,…,m j . \(\hat{X}_{j,i_{j}} \) is the estimation of state vector \(X_{j,i_{j}}\).
The optimal parameter vector \(\theta_{j,i_{j}}^{ *}\) is defined as

where \(\varOmega _{j,i_{j}},U_{j,i_{j}}\), and \(\hat{U}_{j,i_{j}} \) are compact regions for \(\theta_{j,i_{j}},X_{j,i_{j}}\), and \(\hat{X}_{j,i_{j}}\), respectively. The fuzzy minimum approximation errors \(\varepsilon_{j,i_{j}} \) and approximation errors \(\delta_{j,i_{j}} \) are defined as

Assumption 2
There are unknown positive constants \(\varepsilon_{j,i_{j}}^{ *}\) and \(\delta_{j,i_{j}}^{ *}\) such that \(\vert \varepsilon_{j,i_{j}} \vert \le\varepsilon_{j,i_{j}}^{ *}\) and \(\vert \delta_{j,i_{j}} \vert \le\delta_{j,i_{j}}^{ *}\).
Denote \(\omega_{j,i_{j}} = \varepsilon_{j,i_{j}} - \delta_{j,i_{j}}\), by Assumption 2, one has \(\vert \omega_{j,i_{j}} \vert \le\varepsilon_{j,i_{j}}^{*} + \delta_{j,i_{j}}^{ *} = \omega_{j,i_{j}}^{ *}\), where \(\omega_{j,i_{j}}^{ *}\) is also an unknown constant. \(\varepsilon_{j,i_{j}}^{ *}\) and \(\omega_{j,i_{j}}^{ *}\) can be estimated by the parameters adaptation laws to be designed in the next section.
3 Nonlinear fuzzy adaptive observer design
Note that the states \((x_{j,2}, \ldots,x_{j,m_{j}})^{T} \) in system (1) are not available for measurement, thus a state observer should be designed to estimate the unmeasured states. A fuzzy adaptive observer is designed for (1) as

Rewrite (15) in state space form

Let \(e_{j} = \underline{x}_{m_{j}} - \underline{\hat{x}}_{m_{j}} \) be state estimation error vector. From (1) and (16), one has a composite error dynamic equation

where \(\delta_{j} = (\delta_{j,1},\delta_{j,2},\ldots,\delta_{j,m_{j}})^{T}\).
Consider the following Lyapunov candidate V j,0 as

where λ j =λ min(P j )⋅λ min(Q j ),λ min(P j ), and λ min(Q j ) are the smallest eigenvalues of the matrices P j and Q j , respectively.
Choosing an appropriate constant η j,0>0 such that
By using the well-known mean value theorem in [26], \(g_{j,i_{j}}(y_{j}) \) can be expressed as \(g_{j,i_{j}}(y_{j}) =y_{j}\psi_{j,i_{j}}(y_{j})\), thus
By Lemma 2, one can obtain the following inequalities:

where \(\delta_{j}^{ *} = (\delta_{j,1}^{ *},\delta_{j,2}^{ *},\ldots,\delta_{j,m_{j}}^{ *} )^{T}\).
Substituting (20) and (21) into (19) results in

where \(\varXi _{j} = \frac{1}{2\eta_{j,0}^{4}}\Vert \delta_{j}^{ *} \Vert^{4}\).
Remark
Note that if the stochastic disturbance dw=0 (the third term is zero) and fuzzy logic systems \(\hat{f}_{j,i_{j}}(\hat{X}_{j,i_{j}}\vert \theta_{j,i_{j}} ) \) can well approximate \(f_{j,i_{j}}(X_{j,i_{j}}) \) in system (1), then Ξ j will be small, and by (22), it is concluded that the design state observer (15) is asymptotically stable. It should be pointed that the linear reduced-order state observer used in [22–26], even if dw=0, it cannot be concluded that the state observer is asymptotically stable.
4 Control design and stability analysis
In this section, a fuzzy controller and parameter adaptive laws are to be developed by using the backstepping design and DSC technique so that all the signals in the closed-loop systems are SUUB, the observer errors and the system outputs are as small as the desired.
The m j -steps adaptive fuzzy output-feedback backstepping design is based on the following changes of coordinates:



where \(\chi_{j,i_{j}} \) is called the error surface, \(z_{j,i_{j}}\) (j=1,…,n;i j =2,…,m j ) is called the output error of the first-order filter.
Step j.1 (j=1,2,…,n) Using (1), (15), (24), and (25), one has

Consider the following Lyapunov function candidate:
where γ j,1>0 and \(\bar{\gamma}_{j,1} > 0\) are design parameters. \(\tilde{\theta}_{j,1} = \theta_{j,1}^{*} - \theta_{j,1} \) and \(\tilde{\varepsilon}_{j,1} =\varepsilon_{j,1}^{ *} - \hat{\varepsilon}_{j,1} \) are the parameter errors. θ j,1 and \(\hat{\varepsilon}_{j,1}\) are the estimates of \(\theta_{j,1}^{*}\) and \(\varepsilon_{j,1}^{*}\), respectively.

By Lemma 2, the following inequalities can be obtained:


where η j,1>0 is a design parameter. Substituting (29)–(30) into (28), one has

Design the intermediate control function α j,1 and the adaptation functions θ j,1 and \(\hat{\varepsilon}_{j,1}\) as



where σ j,1>0 and \(\bar{\sigma}_{j,1} > 0 \) are design parameters, and \(\theta_{j,1}(0) = \hat{\varepsilon}_{j,1}(0) = 0\).
Substituting (32)–(34) into (31) and utilizing the inequalities

(31) becomes

where \(p_{j,1} = p_{j,0} - \frac{1}{4\eta_{j,1}^{4}}\).
Introduce a new state variable z j,2 and let α j,1 pass through a first-order filter with the constant τ j,2 to obtain z j,2
Step j.i j (j=1,2,…,n; i j =2,…m j −1)
From (24) and (25), the time derivative of χ i is

To avoid repeatedly differentiating \(\alpha_{j,i_{j}} \) in the traditional backstepping design, which leads to the so-called “explosion of complexity,” we can incorporate the DSC technique proposed by [30–32] into the following backstepping design.
Introduce a new state variable z i,j+1 and let \(\alpha_{j,i_{j}} \) pass through a first-order filter with the constant \(\tau_{j,i_{j} + 1}\) to obtain \(z_{j,i_{j} + 1} \)
(37) can be rewritten as

By the definition of \(\xi_{j,i_{j} + 1} = z_{j,i_{j} + 1} -\alpha_{j,i_{j}}\), it yields \(\dot{z}_{j,i_{j} + 1} = - \frac{\xi_{j,i_{j} + 1}}{\tau_{j,i_{j} + 1}}\) and

where \(\underline{\chi}_{j,i_{j}} = [\chi_{j,1}\cdots\chi_{j,i_{j}}]^{T},\underline{\xi}_{j,i_{j} + 1} = [\xi_{j,2}\cdots \xi_{j,i_{j} + 1}]^{T} \) and

Consider the following Lyapunov function candidate:

where \(\gamma_{j,i_{j}} > 0\) and \(\bar{\gamma}_{j,i_{j}} > 0\) are design parameters. \(\tilde{\theta}_{j,i_{j}} = \theta_{j,i_{j}}^{*} -\theta_{j,i_{j}}\) and \(\tilde{\omega}_{j,i_{j}} = \omega_{j,i_{j}}^{ *}- \hat{\omega}_{j,i_{j}} \) are the parameters errors. \(\theta_{j,i_{j}} \) and \(\hat{\omega}_{j,i_{j}}\) are the estimates of \(\theta_{j,i_{j}}^{*} \) and \(\omega_{j,i_{j}}^{ *}\), respectively.
From (39), (40), and (43), one has

Choose intermediate control function \(\alpha_{j,i_{j}} \) and adaptation functions \(\theta_{j,i_{j}} \) and \(\hat{\omega}_{j,i_{j}} \) as:



with \(\theta_{j,i_{j}}(0) = 0,\hat{\omega}_{j,i_{j}}(0) = 0\).
Substituting (45)–(47) into (44) and utilizing the inequalities

one can obtain

Step j.m j (j=1,2,…,n) In the final step, the actual control input u j appears. From (15) and (24), one has

Choose the following Lyapunov function candidate:

where \(\tilde{\theta}_{j,m_{j}} = \theta_{j,m_{j}}^{*} -\theta_{j,m_{j}}\) and \(\tilde{\omega}_{j,m_{j}} = \omega_{j,m_{j}}^{ *}- \hat{\omega}_{j,m_{j}} \) are the parameter errors, \(\theta_{j,m_{j}} \) and \(\hat{\omega}_{j,m_{j}} \) are the estimates of \(\theta_{j,m_{j}}^{*},\omega_{j,m_{j}}^{ *}\), respectively.
Design controller u j and adaptation functions \(\theta_{j,m_{j}} \) and \(\hat{\omega}_{j,m_{j}} \) as



with \(\theta_{j,m_{j}}(0) = \hat{\omega}_{j,m_{j}}(0) = 0\).
Similar to the derivations in step j.i j , one has

Applying Young’s inequality, one has







where

Assumption 3
[33]
For a given \(p_{j,i_{j}} > 0\), for all initial conditions satisfying \(V_{j,i_{j}}(t) \le p_{j,i_{j}}\), where

Since for any \(p_{j,i_{j}} > 0\), the sets \(\prod_{j,k} = \{ V_{j,i_{j}}\le2p_{j,i_{j}}\}\) (j=1,…,n,k=2,…,i j ) is a compact set in \(R^{\sum_{i_{j} = 1}^{k} N_{i_{j}} + j + 3k}\) where \(N_{i_{j}} \) is the dimension of \(\tilde{\theta}_{i,i_{j}}\). Since \(B_{j,i_{j} + 1}(\cdot) \) and \(\mathit{Tr}\{ C_{j,i_{j} + 1}( \cdot)^{T}C_{j,i_{j} + 1}( \cdot)\} \) are continuous functions, there exists the positive constants \(M_{j,i_{j} + 1}( \cdot),N_{j,i_{j} + 1}( \cdot)\) such that |B j,k+1(⋅)|≤M j,k+1(⋅),|Tr{C j,k+1(⋅)T C j,k+1(⋅)}|≤N j,k+1(⋅) on ∏ j,k .
Substituting (55)–(61) into (54) results in

Choose the design parameters \(\eta_{j,0},\eta_{j,1},c_{j,i_{j}},\upsilon_{j,i_{j}}\) and \(\rho_{j,i_{j}}\) (j=1,…,n;i j =1,…,m j ) such that





Substituting (63)–(67) into (62), one has

Denote λ max(P j ) is the largest eigenvalue of P j , and let

then (68) becomes
Finally, choose the whole Lyapunov function candidate as
Combining (69) and (70), one has

where ρ=min{ρ 1,ρ 2⋯ρ n },μ=μ 1+μ 2+⋯+μ n .
By Lemma 1 and inequality (74), and using the same arguments as [23, 26, 28], one can obtain that all the signals of the closed-loop system are bounded by μ/ρ, that is, e j and \(\chi_{j,i_{j}} \) are SUUB in probability. \(\tilde{\theta}_{j,i_{j}},\tilde{\varepsilon}_{j,1}\), and \(\tilde{\omega}_{j,k}\) are also SUUB in probability (j=1,2,…,n,i j =1,2,…,m j ,k=2,…,m j ). Moreover, choosing appropriate design parameters, the states observer errors and the outputs of the control system can be made as small as the desired [25, 26].
The above design procedures and stable analysis are summarized in the following theorem.
Theorem 1
For stochastic nonlinear system (1), under Assumptions 1–3, the state observer (15) and the controller (51), with the intermediate control (32), (45) and parameter laws (33)–(34), (46)–(47), and (52)–(53) guarantee that all the signals in the closed-loop system is semiglobally uniformly ultimately bounded in probability. Moreover, the states observer errors and the outputs of the control system can be made as small as the desired by choosing appropriate design parameters.
5 Simulation example
In this section, the proposed adaptive fuzzy control approach is applied to the following example to verify its effectiveness.
Example
Consider a two-continuous stirred tank reactor process with stochastic disturbances, which is described by the following differential equation [16, 34]:
as the described [34], cooling water is added to the cooling jackets around both reactors at flow rates F j1 and F j2, temperatures T j,1 and T j,2, respectively. Denote \(x_{1,1} =C_{A2} - C_{A2}^{d}\), x 1,2=F 2, \(x_{2,1} = T_{2} - T_{2}^{d}\), \(x_{2,2} = T_{j2} -T_{j2}^{d}\), \(x_{3,1} = T_{1} - T_{j1}^{d}\), with V j1=V j2=V j ,V 1=V 2=V,F 0=F 2=F. w is an independent r-dimensional standard Wiener process, and the parameters in (72) are

where α,E, and λ denote the reaction rate constant, activation energy, and heat generation rate; ρ and ρ j are the densities of liquid in the reactors and in the jackets; c p and c j stand for heat capacities. The values of the process parameters are provided in Table 1.
The objective is to control C A2,T 1, and T 2 by manipulating C A0,T j10, and T j20. The deviation \(T_{0} - T_{0}^{d}\) of the inlet temperature T 0 from the steady-state value \(T_{0}^{d} \) is assumed to be an unmeasurable disturbance.
Define the following coordinate changes: \(\bar{x}_{1,1} =x_{1,1},\bar{x}_{1,2} = b_{11}x_{1,2},\bar{x}_{2,1} =x_{2,1},\bar{x}_{2,2} = b_{21}x_{2,2}\), \(\bar{x}_{3,1} = x_{3,1} \) and \(\bar{x}_{3,2} = b_{31}x_{3,2}\), then the system (72) is of the same form as in system (1)
where \(\bar{u}_{1} = b_{11}b_{12}u_{1},\bar{u}_{2} =b_{21}b_{22}u_{2},\bar{\phi}_{21}(\bar{x}_{2,1},\bar{x}_{2,1}) =\phi_{21}(x_{1,1},x_{2,1})\), \(\bar{\phi}_{22}(\bar{x}_{2,1},\bar{x}_{2,2})= b_{21}\phi_{22}(x_{2,1}, x_{2,2})\), \(\bar{u}_{3} = b_{31}b_{32}u_{3}\) and \(\bar{\phi}_{32}(\bar{x}_{3,1},\bar{x}_{3,2}) =b_{31}\phi_{32}(x_{3,1}, b_{31}x_{3,2})\).
In the simulation study, eleven fuzzy set are defined over interval [−10,10] for all \(\bar{x}_{1,1},\bar{x}_{1,2},\bar{x}_{2,1}, \bar{x}_{2,2},\bar{x}_{3,1}\), and \(\bar{x}_{3,2}\), and by choosing partitioning points as −10,−8,−6,−4,0,2,4,6,8, and 10, their fuzzy membership functions are given as follows:

Let

Then

The fuzzy controllers and parameters of adaptive law are constructed as

The design parameters are chosen as

The initial conditions are chosen as

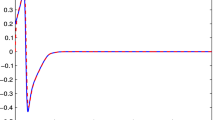
The simulation results are shown in Figs. 1–9.

The trajectories of x 1,1 “solid line” and \(\hat{x}_{1,1} \) “dash-dotted”

The trajectories of x 1,2 “solid line” and \(\hat{x}_{1,2} \) “dash-dotted”

The trajectories of x 2,1 “solid line” and \(\hat{x}_{2,1} \) “dash-dotted”

The trajectories of x 2,2 “solid line” and \(\hat{x}_{2,2} \) “dash-dotted”

The trajectories of x 3,1 “solid line” and \(\hat{x}_{3,1} \) “dash-dotted”

The trajectories of x 3,2 “solid line” and \(\hat{x}_{3,2} \) “dash-dotted”

The trajectory of u 1

The trajectory of u 2

The trajectory of u 3
From the above simulation results, it is clear that even though the exact information on the nonlinear functions in the system is not available and the state variables are immeasurable, the proposed adaptive fuzzy output feedback control approaches guarantee the stability of the closed-loop adaptive control system and achieve good control performance.
6 Conclusions
In this paper, an observer-based adaptive fuzzy output feedback control approach has been proposed for a class of uncertain MIMO stochastic nonlinear system with immeasurable states. Fuzzy logic systems are used to approximate the unknown nonlinear functions and a fuzzy state observer is designed to estimate those immeasurable states. By combining the adaptive backstepping design with the DSC technique, a novel adaptive fuzzy output feedback backstepping control approach is developed. It is proved that all the signals of the closed-loop control system are semiglobally uniformly ultimately bounded (SUUB) in probability; the observer errors and the system outputs can be made as small as the desired by appropriate choice of the design parameters. Simulation results are provided to show the effectiveness of the proposed approach.
References
Polycarpou, M.M., Mears, M.J.: Stable adaptive tracking of uncertain systems using nonlinearly parametrized on-line approximators. Int. J. Control 70, 363–384 (1998)
Zhou, S.S., Feng, G.F.C.B.: Robust control for a class of uncertain nonlinear systems: adaptive fuzzy approach based on backstepping. Fuzzy Sets Syst. 151, 1–20 (2005)
Zhang, T., Ge, S.S., Hang, C.C.: Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 36, 1835–1846 (2000)
Chen, W.S., Jiao, L.C., Li, R.H., Li, J.: Adaptive backstepping fuzzy control for nonlinearly parameterized systems with periodic disturbances. IEEE Trans. Fuzzy Syst. 18, 674–685 (2010)
Zhang, Y.P., Peng, P.Y., Jiang, Z.P.: Stable neural controller design for unknown nonlinear systems using backstepping. IEEE Trans. Neural Netw. 11, 1347–1360 (2000)
Chen, B., Liu, X.P., Shi, P.: Direct Adaptive fuzzy control for nonlinear systems with time-varying delays. Inf. Sci. 180, 776–792 (2010)
Wang, M., Chen, B., Liu, X.P., Shi, P.: Adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear time-delay systems. Fuzzy Sets Syst. 159, 949–967 (2008)
Wang, M., Chen, B., Shi, P.: Adaptive neural control for a class of perturbed strict-feedback nonlinear time-delay systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 3, 721–730 (2008)
Chen, B., Liu, X.P., Liu, K.F., Lin, C.: Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 45, 1530–1535 (2009)
Chen, B., Liu, X.P., Liu, K., Lin, C.: Fuzzy-approximation-based adaptive control of strict-feedback nonlinear systems with time delays. Automatica 18, 883–892 (2010)
Liu, Y.J., Wang, W., Tong, S.C.: Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters. IEEE Trans. Syst. Man Cybern., Part A, Syst. Hum. 40, 170–184 (2010)
Chen, B., Liu, X.P., Liu, K., Lin, C.: Novel adaptive neural control design for nonlinear MIMO time-delay systems. Automatica 46, 1554–1560 (2009)
Hua, C.C., Guan, X.P., Shi, P.: Robust output tracking control for a class of time-delay nonlinear using neural network. IEEE Trans. Neural Netw. 18, 495–505 (2007)
Hua, C.C., Wang, Q.G., Guan, X.P.: Adaptive fuzzy output-feedback controller design for nonlinear time-delay systems with unknown control direction. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 39, 363–374 (2009)
Tong, S.C., Li, Y.M.: Observer-based fuzzy adaptive control for strict-feedback nonlinear systems. Fuzzy Sets Syst. 160, 1749–1764 (2009)
Tong, S.C., Li, C.Y., Li, Y.M.: Fuzzy adaptive observer backstepping control for MIMO nonlinear systems. Fuzzy Sets Syst. 160, 2755–2775 (2009)
Shi, P., Xia, Y.Q., Liu, G.P., Rees, D.: On designing of sliding-mode control for stochastic jump systems. IEEE Trans. Autom. Control 51, 97–103 (2006)
Pan, Z.G., Basar, T.: Adaptive controller design for tracking and disturbance attenuation in parametric strict-feedback nonlinear systems. IEEE Trans. Autom. Control 43, 1066–1083 (1998)
Deng, H., Krstić, M.: Output-feedback stochastic nonlinear stabilization. IEEE Trans. Autom. Control 44, 328–333 (1999)
Wu, Z., Xie, X., Shi, P.: Backstepping controller design for a class of stochastic nonlinear systems with Markovian switching. Automatica 45, 997–1004 (2009)
Xia, Y., Fu, M., Shi, P.: Adaptive backstepping controller design for stochastic jump systems. IEEE Trans. Autom. Control 54, 2853–2859 (2009)
Ji, H.B., Xi, H.S.: Adaptive output-feedback tracking of stochastic nonlinear systems. IEEE Trans. Autom. Control 51, 355–360 (2006)
Liu, S.J., Zhang, J.F., Jiang, Z.P.: Decentralized adaptive output-feedback stabilization for large-scale stochastic nonlinear systems. Automatica 43, 238–251 (2007)
Liu, S.J., Ge, S.S., Zhang, J.F.: Adaptive output-feedback control for a class of uncertain stochastic non-linear systems with time delays. Int. J. Control 81, 1210–1220 (2008)
Chen, W.S., Jiao, L.C.: Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40, 939–990 (2010)
Li, J., Chen, W.S., Li, J.M., Fang, Y.Q.: Adaptive NN output-feedback stabilization for a class of stochastic nonlinear strict-feedback systems. ISA Trans. 48, 468–475 (2009)
Khas’minski, R.Z.: Stochastic Stability of Differential Equations. Springer, Berlin (1972)
Li, J., Chen, W.S., Li, J.M.: Adaptive NN output-feedback decentralized stabilization for a class of large-scale stochastic nonlinear strict-feedback systems. Int. J. Robust Nonlinear Control 10, 1002–1609 (2010)
Wang, L.X.: Adaptive Fuzzy Systems and Control. Prentice Hall, Englewood Cliffs (1994)
Li, T.S., Wang, D., Feng, G.: A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40, 915–927 (2010)
Yoo, S.J., Park, J.B.: Neural-network-based decentralized adaptive control for a class of large-scale nonlinear systems with unknown time-varying delays. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 39, 1316–1323 (2009)
Wang, D., Huang, J.: Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw. 16, 195–202 (2005)
Chen, W.S., Jiao, L.C., Du, Z.B.: Output-feedback adaptive dynamic surface control of stochastic nonlinear systems using neural network. IET Control Theory Appl. 4, 3012–3021 (2010)
Liu, X.P., Jutan, A., Rohani, S.: Almost disturbance decoupling of MIMO nonlinear systems and application to chemical processes. Automatica 40, 465–471 (2004)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (No. 61074014), and the Outstanding Youth Funds of Liaoning Province (No. 2005219001).
Rights and permissions
About this article
Cite this article
Li, Y., Tong, S. & Li, Y. Observer-based adaptive fuzzy backstepping dynamic surface control design and stability analysis for MIMO stochastic nonlinear systems. Nonlinear Dyn 69, 1333–1349 (2012). https://doi.org/10.1007/s11071-012-0351-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0351-0