
Abstract
This paper presents several modified subgradient extragradient methods with inertial effects to approximate solutions of variational inequality problems in real Hilbert spaces. The operators involved are either pseudomonotone Lipschitz continuous or pseudomonotone non-Lipschitz continuous. The advantage of the suggested algorithms is that they can work adaptively without the prior information of the Lipschitz constant of the mapping involved. Strong convergence theorems of the proposed algorithms are established under some suitable conditions. Finally, some numerical experiments are given to verify the advantages and efficiency of the proposed iterative algorithms with respect to previously known ones.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction and preliminaries
The goal of this paper is to provide several efficient and adaptive numerical methods to solve pseudomonotone variational inequality problems in real Hilbert spaces. Recall that the classical variational inequality problem (shortly, VIP) is given as follows:
where C is a nonempty, closed and convex subset of a real Hilbert space \( \mathcal {H} \) with inner product \(\langle \cdot , \cdot \rangle \) and induced norm \(\Vert \cdot \Vert \), and \(M: \mathcal {H} \rightarrow \mathcal {H}\) is an operator. Throughout the paper, the solution set of the (VIP) is denoted by \( \mathrm {VI}(C,M) \), and is assumed to be nonempty. The variational inequality, as one of the fundamental problems in mathematics, provides a unified and useful framework for the study of many linear and nonlinear problems. It has become one of the effective mathematical methods and research tools in solving optimization problems, and has been widely used in many research fields (such as engineering, finance, mechanics, transportation modeling, operations management and optimal control), see, e.g., Mordukhovich (2018), Vuong and Shehu (2019), Bonacker et al. (2020), Cuong et al. (2020), Khan et al. (2015) and Sahu et al. (2021).
Let us first review the basic definitions of some mappings in nonlinear analysis, which will be used in the next sequel. Recall that a mapping \(M: \mathcal {H} \rightarrow \mathcal {H}\) is said to be:
-
L-Lipschitz continuous with \( L > 0 \) if \( \Vert M x-M y\Vert \le L\Vert x-y\Vert , \; \forall x,y\in \mathcal {H} \).
-
monotone if \( \langle M x-M y, x-y\rangle \ge 0, \; \forall x,y\in \mathcal {H} \).
-
pseudomonotone if \( \langle M x, y-x\rangle \ge 0 \Rightarrow \langle M y, y-x\rangle \ge 0, \; \forall x,y\in \mathcal {H} \).
-
sequentially weakly continuous if for each sequence \(\left\{ x_{n}\right\} \) converges weakly to x implies \(\left\{ M x_{n}\right\} \) converges weakly to Mx.
In the past decades, researchers proposed a large number of iterative methods to solve variational inequality problems, among which the methods based on extragradient types are the focus of this paper. Recall that the classical extragradient method (shortly, EGM), which was introduced by Korpelevich (1976), requires computing the projection on the feasible set twice in each iteration. The computation of the projection is difficult if the feasible set is complex. In order to improve the computational efficiency of the iterative algorithm, scholars have proposed many improvements to the EGM, see, e.g., (He 1997; Solodov and Svaiter 1999; Tseng 2000; Censor et al. 2011; Malitsky 2015) and the references therein. It should be mentioned that the subgradient extragradient method (SEGM) proposed by Censor et al. (2011) replaces the projection on the feasible set in the second step of the EGM with a projection on the half-space in each iteration. It is known that the projection on a half-space can be computed explicitly (see, e.g., Cegielski 2012). Thus, the SEGM greatly improves the computational efficiency of the EGM. Note that the SEGM can only obtain the weak convergence in infinite-dimensional Hilbert spaces. From the viewpoint of the physically tangible property, the strong convergence, which is norm convergence, is often much more desirable than the weak convergence. This shows the theoretical value and potential applications of analyzing the strong convergence of iterative algorithms in infinite-dimensional Hilbert spaces. In the last decades, many techniques were developed to obtain strongly convergent numerical methods for solving variational inequality problems in infinite-dimensional Hilbert spaces; see, e.g., Mann-type methods (Kraikaew and Saejung 2014; Tan et al. 2021), viscosity-type methods (Shehu and Iyiola 2017; Thong et al. 2019), and projection-based methods (Censor et al. 2011; Cho 2020). In this paper, we consider several strongly convergent numerical algorithms for variational inequalities in the framework of real Hilbert spaces, which is motivated by the real applications of the (VIP) in infinite-dimensional spaces, such as machine learning and quantum mechanics.
On the other hand, it is noted that the Lipschitz constants of the operators corresponding to the problems studied in practical applications are difficult to obtain and estimate, which will further affect the use of those algorithms whose step size is related to the prior information of the Lipschitz constant. Recently, some adaptive algorithms that do not require the prior information of the Lipschitz constant of the operator involved were proposed to solve variational inequality problems, see, e.g., Thong and Hieu (2018), Yang et al. (2018), Yang and Liu (2019), Liu and Yang (2020), Cai et al. (2021), Hieu et al. (2021) and the references therein. Among the step size selections of these methods, a non-monotonic step size criterion proposed by Liu and Yang (2020), and a new Armijo-type step size approach introduced by Cai et al. (2021) are desired to be mentioned. Their numerical experiments demonstrated the advantages and efficiency of the proposed algorithms over previously known ones.
It is known that the class of pseudomonotone mappings contains the class of monotone mappings. Recently, many algorithms were proposed in the literature to solve pseudomonotone variational inequalities in real Hilbert spaces; see, e.g., Hieu et al. (2021), Shehu et al. (2019), Jolaoso et al. (2020), Thong et al. (2020), Yang (2021), Grad and Lara (2021) and the references therein. However, a common feature enjoyed by these algorithms is the requirement that the operator satisfies the Lipschitz continuity, which may be difficult to be satisfied in practical applications. To overcome this drawback, scholars proposed many iterative schemes for solving non-Lipschitz continuous monotone (or pseudomonotone) variational inequality problems (see, e.g., Cai et al. 2021; Shehu et al. 2019; Cho 2020; Malitsky 2020; Reich et al. 2021; Tan and Cho 2021). On the other hand, the inertial extrapolation method based on discrete versions of a second-order dissipative dynamic system was widely studied as one of the acceleration techniques. Recently, inertial-type methods attracted a great deal of attention and interest from researchers in the optimization community, who proposed a large number of inertial-type numerical algorithms to solve image processing, signal recovery, variational inequality problems, equilibrium problems, split feasibility problems, fixed point problems, and variational inclusion problems, see, e.g., Hieu and Gibali (2020), Ceng and Shang (2021), Shehu and Yao (2020), Shehu and Gibali (2021) and the references therein. The main feature of inertial-type methods is the inclusion in each iteration of an inertial term, which is obtained from the combination of some previously known iteration points. This small change can improve the convergence speed of the original algorithm without the inertial term.
Inspired and motivated by the above work, this paper proposes several adaptive inertial subgradient extragradient methods to solve variational inequality problems in infinite-dimensional real Hilbert spaces. Our contributions in this paper are stated as follows: (1) the subgradient extragradient method introduced by Censor et al. (2011) is modified in two simple ways by using two different step sizes in each iteration; (2) two non-monotonic adaptive step size criteria are used to make the proposed algorithms work adaptively; (3) the variational inequality operators involved in the proposed methods are pseudomonotone Lipschitz continuous (or non-Lipschitz continuous); (4) the strong convergence of the iterative sequences generated by the proposed algorithms is established without the prior knowledge of the Lipschitz constant of the operator; (5) inertial extrapolation terms are added to the proposed algorithms to accelerate their convergence speed; and (6) some numerical experiments are given to verify the computational efficiency of the proposed iterative schemes compared to some known algorithms in the literature (Cai et al. 2021; Thong and Vuong 2019; Thong et al. 2020).
In the whole paper, we use the symbol \(x_{n} \rightarrow x\) (\(x_{n} \rightharpoonup x\)) to represent the strong convergence (weak convergence) of the sequence \(\left\{ x_{n}\right\} \) to x, and use \(P_{C}: \mathcal {H} \rightarrow C\) to denote the metric projection from \( \mathcal {H} \) onto C, i.e., \(P_{C}(x):= \arg \min \{\Vert x-y\Vert ,\, y \in C\}\). We conclude the section by giving the following lemma that is crucial in the convergence analysis of the proposed algorithms.
Lemma 1.1
(Saejung and Yotkaew 2012) Let \(\left\{ p_{n}\right\} \) be a positive sequence, \(\left\{ s_{n}\right\} \) be a sequence of real numbers, and \(\left\{ \alpha _{n}\right\} \) be a sequence in (0, 1) such that \(\sum _{n=1}^{\infty } \alpha _{n}=\infty \). Assume that
If \(\limsup _{k \rightarrow \infty } s_{n_{k}} \le 0\) for every subsequence \(\left\{ p_{n_{k}}\right\} \) of \(\left\{ p_{n}\right\} \) satisfying \(\lim \inf _{k \rightarrow \infty }\) \((p_{n_{k}+1}-p_{n_{k}}) \ge 0\), then \(\lim _{n \rightarrow \infty } p_{n}=0\).
2 Main results
In this section, we introduce several modified subgradient extragradient algorithms with inertial effects for solving pseudomonotone variational inequality problems in infinite-dimensional Hilbert spaces. The advantage of our algorithms is that they can work without the prior knowledge of the Lipschitz constant of the mapping and the strong convergence of the iterative sequence generated by the proposed algorithms can be guaranteed.
2.1 The first type of modified subgradient extragradient methods
In this subsection, two new iterative schemes are proposed for solving the (VIP) in real Hilbert spaces. We first introduce a new modified subgradient extragradient algorithm with a non-monotonic sequence of step sizes (see Algorithm 2.1 below) and assume that the proposed algorithm satisfies the following conditions.
-
(C1)
The feasible set C is a nonempty, closed and convex subset of the real Hilbert space \(\mathcal {H}\) and the solution set of the problem (VIP) is nonempty.
-
(C2)
The operator \(M: \mathcal {H} \rightarrow \mathcal {H}\) is pseudomonotone, L-Lipschitz continuous on \( \mathcal {H} \) and sequentially weakly continuous on C.
-
(C3)
Let \( \{\epsilon _{n}\} \) be a positive sequence such that \(\lim _{n \rightarrow \infty } \frac{\epsilon _{n}}{\tau _{n}}=0\), where \( \{\tau _{n}\}\subset (0,1) \) satisfies \(\lim _{n \rightarrow \infty } \tau _{n}=0\) and \(\sum _{n=1}^{\infty } \tau _{n}=\infty \). Let \(\left\{ \sigma _{n}\right\} \subset (a, b) \subset \left( 0,1-\tau _{n}\right) \) for some \(a>0, b>0\).
We now state the first iterative scheme in Algorithm 2.1.

The following lemmas are important for the convergence analysis of our main results.
Lemma 2.1
Suppose that Condition (C2) holds. Then the sequence \( \{\lambda _{n}\} \) generated by (2.3) is well defined and \(\lim _{n \rightarrow \infty } \lambda _{n}=\lambda \) and \(\lambda \in \left[ \min \{{\mu }/{L}, \lambda _{1}\}, \lambda _{1}+\sum _{n=1}^{\infty }\xi _{n}\right] \).
Proof
The proof is similar to Lemma 3.1 in Liu and Yang (2020) and thus we omit the details. \(\square \)
Lemma 2.2
Assume that Condition (C2) holds. Let \(\left\{ q_{n}\right\} \) be a sequence generated by Algorithm 2.1. Then, for all \( p \in \mathrm {VI}(C, M) \),
where \( \beta ^{*}=2-\beta -\frac{\beta \mu \lambda _{n}}{\lambda _{n+1}} \) if \( \beta \in [1,2/(1+\mu )) \) and \( \beta ^{*}=\beta -\frac{\beta \mu \lambda _{n}}{\lambda _{n+1}} \) if \( \beta \in (0,1) \).
Proof
From the definition of \( q_{n} \) and the property of projection \( \Vert P_{C} (x)-y\Vert ^{2} \le \Vert x-y\Vert ^{2}-\Vert x-P_{C} (x)\Vert ^{2},\; \forall x \in \mathcal {H}, y \in C \), we have
Since \( p \in \mathrm {VI}(C, M) \) and \(v_{n} \in C\), we obtain \(\langle M p, v_{n}-p\rangle \ge 0\). By the pseudomonotonicity of mapping M, we have \(\langle M v_{n}, v_{n}-p\rangle \ge 0\). Thus the inequality (2.4) reduces to
Now we estimate \( 2\left\langle \beta \lambda _{n} M v_{n}, q_{n}-v_{n}\right\rangle \). Note that
In addition,
Since \( q_{n}\in T_{n} \), one sees that
According to the definition of \( \lambda _{n+1} \), it follows that
Substituting (2.7), (2.8), and (2.9) into (2.6), we have
which implies that
Combining (2.5) and (2.10), we conclude that
Note that
which yields that
This together with (2.11) implies
On the other hand, if \(\beta \in (0,1)\), then we obtain
This completes the proof of the lemma. \(\square \)
Remark 2.1
From Lemma 2.1 and the assumptions of the parameters \( \mu \) and \( \beta \) (i.e., \(\mu \in (0,1)\) and \( \beta \in (0,2/(1+\mu )) \)), we can obtain that \( \beta ^{*}>0 \) for all \( n\ge n_{0} \) in Lemma 2.2 always holds.
Lemma 2.3
(Thong et al. 2020, Lemma 3.3) Suppose that Conditions (C1)–(C3) hold. Let \(\{u_{n}\}\) and \( \{v_{n} \}\) be two sequences formulated by Algorithm 2.1. If there exists a subsequence \(\left\{ u_{n_{k}}\right\} \) of \(\left\{ u_{n}\right\} \) such that \(\left\{ u_{n_{k}}\right\} \) converges weakly to \(z \in \mathcal {H}\) and \(\lim _{k \rightarrow \infty }\Vert u_{n_{k}}-v_{n_{k}}\Vert =0\), then \(z \in \mathrm {VI}(C, M)\).
We now in a position to prove our first main result of this section.
Theorem 2.1
Suppose that Conditions (C1)–(C3) hold. Then the sequence \(\left\{ x_{n}\right\} \) generated by Algorithm 2.1 converges to \(p \in \mathrm {VI}(C, M)\) in norm, where \(\Vert p\Vert =\min \{\Vert z\Vert : z \in \mathrm {VI}(C, M)\}\).
Proof
To begin with, our first goal is to show that the sequence \(\left\{ x_{n}\right\} \) is bounded. Indeed, thanks to Lemma 2.2 and Remark 2.1, one sees that
From the definition of \( u_{n} \), one sees that
According to Condition (C3), we have \(\frac{\phi _{n}}{\tau _{n}}\Vert x_{n}-x_{n-1}\Vert \rightarrow 0\) as \( n\rightarrow \infty \). Therefore, there exists a constant \(Q_{1}>0\) such that
which together with (2.12) and (2.13) implies that
Using the definition of \(x_{n+1}\) and (2.14), we obtain
This implies that the sequence \(\left\{ x_{n}\right\} \) is bounded. We have that the sequences \( \left\{ u_{n}\right\} \) and \(\left\{ q_{n}\right\} \) are also bounded.
From (2.14), one sees that
for some \(Q_{2}>0 \). Combining (2.16), Lemma 2.2 and the inequality \( \Vert \tau x+\sigma y+\delta z\Vert ^{2}= \tau \Vert x\Vert ^{2}+\sigma \Vert y\Vert ^{2}+\delta \Vert z\Vert ^{2}-\tau \sigma \Vert x-y\Vert ^{2} -\tau \delta \Vert x-z\Vert ^{2}-\sigma \delta \Vert y-z\Vert ^{2}\), where \(\tau , \sigma , \delta \in [0, 1]\) and satisfies \(\tau +\sigma +\delta =1\), we obtain
It follows from (2.17) that
From the definition of \( u_{n} \), we have
where \(Q:=\sup _{n \in \mathbb {N}}\{\Vert x_{n}-p\Vert , \phi \Vert x_{n}-x_{n-1}\Vert \}>0\). Setting \(g_{n}=(1-\sigma _{n}) u_{n}+\sigma _{n} q_{n}\), one has
It follows from (2.12) that
Combining (2.19), (2.20), (2.21), and the inequality \( \Vert x+y\Vert ^{2} \le \Vert x\Vert ^{2}+2\langle y, x+y\rangle ,\;\forall x,y \in \mathcal {H} \), we have
Finally, we need to show that the sequence \(\{\Vert x_{n}-p\Vert \}\) converges to zero. We set
Then the last inequality in (2.22) can be written as \( p_{n+1} \le (1- \tau _{n}) p_{n}+ \tau _{n} s_{n}\) for all \(n \ge n_{0} \). Note that the sequence \(\left\{ \tau _{n}\right\} \) is in (0, 1) and \(\sum _{n=1}^{\infty } \tau _{n}=\infty \). By Lemma 1.1, it remains to show that \(\limsup _{k \rightarrow \infty } s_{n_{k}} \le 0\) for every subsequence \(\left\{ p_{n_{k}}\right\} \) of \(\left\{ p_{n}\right\} \) satisfying \( \liminf _{k \rightarrow \infty }\left( p_{n_{k+1}}-p_{n_{k}}\right) \ge 0 \). For this purpose, we assume that \(\left\{ p_{n_{k}}\right\} \) is a subsequence of \(\left\{ p_{n}\right\} \) such that \( \liminf _{k \rightarrow \infty }\left( p_{n_{k+1}}-p_{n_{k}}\right) \ge 0 \). From (2.18) and the assumption on \( \{\tau _{n}\} \), one obtains
which together with Remark 2.1 yields
This implies that \( \lim _{k \rightarrow \infty }\Vert q_{n_{k}}-u_{n_{k}}\Vert =0 \), which combining with the boundedness of \( \{x_{n}\} \) yields that
Moreover, we have
and
It follows that
Since the sequence \(\{x_{n_{k}}\}\) is bounded, there exists a subsequence \(\{x_{n_{k_{j}}}\}\) of \(\{x_{n_{k}}\}\) such that \( x_{n_{k_{j}}}\rightharpoonup z\). Furthermore,
We obtain that \(u_{n_{k}} \rightharpoonup z\) since \( \Vert x_{n_{k}}-u_{n_{k}}\Vert \rightarrow 0 \). This together with \( \lim _{k \rightarrow \infty }\Vert u_{n_{k}}-v_{n_{k}}\Vert =0\) and Lemma 2.3 yields \(z \in \mathrm {VI}(C, M) \). From the definition of p, the property of projection \( \langle x-P_{C} (x), y-P_{C} (x)\rangle \le 0,\; \forall x \in \mathcal {H}, y \in C \) and (2.25), we have
Combining (2.24) and (2.26), we obtain
This together with \(\lim _{n \rightarrow \infty } \frac{\phi _{n}}{\tau _{n}}\Vert x_{n}-x_{n-1}\Vert =0\) and (2.23) yields that \( \limsup _{k \rightarrow \infty } s_{n_{k}} \le 0 \). Therefore, we conclude that \(\lim _{n \rightarrow \infty }\Vert x_{n}-p\Vert =0\). That is, \( x_{n}\rightarrow p \) as \( n\rightarrow \infty \). This completes the proof. \(\square \)
Next, we provide a new Armijo-type iterative scheme (see Algorithm 2.2 below) for finding solutions to the non-Lipschitz continuous and pseudomonotone (VIP) in real Hilbert spaces. The following condition (C4) will replace the condition (C2) in Algorithm 2.1.
-
(C4)
The mapping \(M: \mathcal {H} \rightarrow \mathcal {H}\) is pseudomonotone, uniformly continuous on \(\mathcal {H}\) and sequentially weakly continuous on C.
The Algorithm 2.2 is stated as follows.

We need the following lemmas in order to analyze the convergence of Algorithm 2.2.
Lemma 2.4
Suppose that Condition (C4) holds. Then the Armijo-like criteria (2.28) is well defined.
Proof
The proof is similar to Lemma 3.1 in Tan and Cho (2021). Therefore, we omit the details. \(\square \)
Lemma 2.5
Assume that Condition (C4) holds. Let \(\left\{ q_{n}\right\} \) be a sequence generated by Algorithm 2.2. Then, for all \( p \in \mathrm {VI}(C, M) \),
where \( \beta ^{**}=2-\beta -\beta \mu \) if \( \beta \in [1,2/(1+\mu )) \) and \( \beta ^{**}=\beta -\beta \mu \) if \( \beta \in (0,1) \).
Proof
The proof is omitted since it follows the argument of Lemma 2.2. \(\square \)
Remark 2.2
Note that \( \beta ^{**}>0 \) for all \( n\ge 1 \) in Lemma 2.5 always holds.
Lemma 2.6
Suppose that Conditions (C1), (C3), and (C4) hold. Let \(\{u_{n}\}\) and \( \{v_{n} \}\) be two sequences generated by Algorithm 2.2. If there exists a subsequence \(\left\{ u_{n_{k}}\right\} \) of \(\left\{ u_{n}\right\} \) such that \(\left\{ u_{n_{k}}\right\} \) converges weakly to \(z \in \mathcal {H}\) and \(\lim _{k \rightarrow \infty }\Vert u_{n_{k}}-v_{n_{k}}\Vert =0\), then \(z \in \mathrm {VI}(C, M)\).
Proof
A simple modification of Cai et al. (2021, Lemma 3.2) yields the desired conclusion and thus it is omitted. \(\square \)
Theorem 2.2
Suppose that Conditions (C1), (C3), and (C4) hold. Then the sequence \(\left\{ x_{n}\right\} \) created by Algorithm 2.2 converges to \(p \in \mathrm {VI}(C, M)\) in norm, where \(\Vert p\Vert =\min \{\Vert z\Vert : z \in \mathrm {VI}(C, M)\}\).
Proof
The proof is similar to the proof of Theorem 2.1. Therefore, we omit some details of the proof. By Lemma 2.5 and similar statements in (2.12)–(2.14), we have
Applying a similar procedure as in (2.15), we can obtain that \( \{x_{n}\} \), \( \{u_{n}\} \), and \( \{q_{n}\} \) are bounded. Combining (2.16), (2.17) and Lemma 2.5, we can show that
Reviewing the statements from (2.19)–(2.22), we obtain
The rest of the proof follows in the same way as that of Theorem 2.1 but we need apply Lemma 2.6 in place of Lemma 2.3. \(\square \)
2.2 The second type of modified subgradient extragradient methods
In this subsection, two modified versions of the suggested Algorithms 2.1 and 2.2 are proposed to solve the pseudomonotone and Lipschitz continuous (or non-Lipschitz continuous) variational inequality problem in real Hilbert spaces. We first present a modified form of the suggested Algorithm 2.1, see Algorithm 2.3 below for more details. Note that this method is different from the proposed Algorithm 2.1 in computing the values of the sequences \( \{v_{n}\} \) and \( \{q_{n}\} \).

The following lemma plays a crucial role in the convergence analysis of Algorithm 2.3.
Lemma 2.7
Assume that Condition (C2) holds. Let \(\left\{ q_{n}\right\} \) be a sequence generated by Algorithm 2.3. Then, for all \( p \in \mathrm {VI}(C, M) \),
where \(\beta ^{\dagger }=2-\frac{1}{\beta }-\frac{\mu \lambda _{n}}{\lambda _{n+1}}\) if \( \beta \in (0,1] \) and \( \beta ^{\dagger }=\frac{1}{\beta }-\frac{\mu \lambda _{n}}{\lambda _{n+1}} \) if \( \beta >1 \).
Proof
From (2.4) and (2.5), we obtain
Now we estimate \( 2\left\langle \lambda _{n} M v_{n}, q_{n}-v_{n}\right\rangle \). Note that
One can show that
Since \( q_{n}\in H_{n} \), one has
According to the definition of \( \lambda _{n+1} \), we deduce that
Substituting (2.31), (2.32), and (2.33) into (2.30), we have
which implies that
Combining (2.29) and (2.34), we conclude that
Note that
which yields that
This together with (2.35) implies
On the other hand, if \(\beta >1\), then we obtain
The proof is completed. \(\square \)
Remark 2.3
From Lemma 2.1 and the assumptions of the parameters \( \mu \) and \( \beta \) (i.e., \(\mu \in (0,1)\) and \( \beta \in (1/(2-\mu ),1/\mu ) \)), we can obtain that \( \beta ^{\dagger }>0 \) for all \( n\ge n_{1}\) in Lemma 2.7 always holds.
Lemma 2.8
Suppose that Conditions (C1)–(C3) hold. Let \(\{u_{n}\}\) and \( \{v_{n} \}\) be two sequences formulated by Algorithm 2.3. If there exists a subsequence \(\left\{ u_{n_{k}}\right\} \) of \(\left\{ u_{n}\right\} \) such that \(\left\{ u_{n_{k}}\right\} \) converges weakly to \(z \in \mathcal {H}\) and \(\lim _{k \rightarrow \infty }\Vert u_{n_{k}}-v_{n_{k}}\Vert =0\), then \(z \in \mathrm {VI}(C, M)\).
Proof
The conclusion can be obtained by applying a similar statement in Thong et al. (2020, Lemma 3.3). \(\square \)
Theorem 2.3
Suppose that Conditions (C1)–(C3) hold. Then the sequence \(\left\{ x_{n}\right\} \) formed by Algorithm 2.3 converges to \(p \in \mathrm {VI}(C, M)\) in norm, where \(\Vert p\Vert =\min \{\Vert z\Vert : z \in \mathrm {VI}(C, M)\}\).
Proof
It follows from Lemma 2.7 that \( \beta ^{\dagger }>0 \) for all \( n\ge n_{1}\), which is similar to the conclusion of Remark 2.1. Thus, we can obtain the conclusion required by replacing Lemmas 2.2 and 2.3 in the proof of Theorem 2.1 with Lemmas 2.7 and 2.8, respectively. We omit the details of the proof to avoid repetition. \(\square \)
Now, we state the last iterative scheme proposed in this paper in Algorithm 2.4 below. The difference between this scheme and the proposed Algorithm 2.3 is that it can solve the pseudomonotone and non-Lipschitz continuous (VIP) because it uses an Armijo-type step size (2.28) instead of the adaptive step size criterion (2.3).
The Algorithm 2.4 is described as follows.

Lemma 2.9
Assume that Condition (C4) holds. Let \(\left\{ q_{n}\right\} \) be a sequence generated by Algorithm 2.4. Then, for all \( p \in \mathrm {VI}(C, M) \),
where \(\beta ^{\ddag }=2-\frac{1}{\beta }-\mu \) if \( \beta \in (0,1] \) and \( \beta ^{\ddag }=\frac{1}{\beta }-\mu \) if \( \beta >1 \).
Proof
The proof follows the proof of Lemma 2.7 and so it is omitted. \(\square \)
Remark 2.4
Note that \( \beta ^{\ddag }>0 \) for all \( n\ge 1 \) in Lemma 2.9 always holds.
Lemma 2.10
Suppose that Conditions (C1), (C3), and (C4) hold. Let \(\{u_{n}\}\) and \( \{v_{n} \}\) be two sequences generated by Algorithm 2.4. If there exists a subsequence \(\left\{ u_{n_{k}}\right\} \) of \(\left\{ u_{n}\right\} \) such that \(\left\{ u_{n_{k}}\right\} \) converges weakly to \(z \in \mathcal {H}\) and \(\lim _{k \rightarrow \infty }\Vert u_{n_{k}}-v_{n_{k}}\Vert =0\), then \(z \in \mathrm {VI}(C, M)\).
Proof
We can obtain the conclusion by a simple modification of Cai et al. (2021, Lemma 3.2). \(\square \)
Theorem 2.4
Suppose that Conditions (C1), (C3), and (C4) hold. Then the sequence \(\left\{ x_{n}\right\} \) generated by Algorithm 2.4 converges to \(p \in \mathrm {VI}(C, M)\) in norm, where \(\Vert p\Vert =\min \{\Vert z\Vert : z \in \mathrm {VI}(C, M)\}\).
Proof
The proof is similar to that of Theorem 2.2. However, we need to replace Lemmas 2.5 and 2.6 in Theorem 2.2 with Lemmas 2.9 and 2.10, respectively. Therefore, we omit the details of the proof. \(\square \)
Remark 2.5
We now explain the contribution of this paper in detail as follows.
-
1.
We modify the subgradient extragradient method (SEGM) introduced by Censor et al. (2011) in two simple ways. Specifically, our algorithms use two different step sizes for computing the values of \( v_{n} \) and \( q_{n} \) in each iteration, while the SEGM by Censor et al. (2011) employs the same step size for computing these two values in each iteration. Numerical experimental results will show that this modification improves the convergence speed and computational efficiency of the original method (see numerical results for our algorithms when \( \beta =1 \) and \( \beta \ne 1 \) in Sect. 3).
-
2.
The idea of step size selection (i.e., (2.1) and (2.28)) for the methods proposed in this paper comes from the recent work in Liu and Yang (2020) and Cai et al. (2021). The two step size criteria generate non-monotonic step size sequences, which improves the algorithms in the literature (see, e.g., Tan et al. 2021; Yang et al. 2018; Yang and Liu 2019; Hieu et al. 2021; Thong et al. 2020) that use non-increasing step size sequences. In addition, our Algorithms 2.2 and 2.4 can be used to solve non-Lipschitz continuous variational inequalities, which extends a large number of algorithms in the literature (see, e.g., Hieu et al. 2021; Shehu et al. 2019; Jolaoso et al. 2020; Thong et al. 2020; Yang 2021; Grad and Lara 2021) for solving Lipschitz continuous variational inequalities. On the other hand, the four iterative schemes suggested in this paper are designed to solve pseudomonotone variational inequalities. Therefore, our results extend many methods in the literature (see, e.g., Tan et al. 2021; Shehu and Iyiola 2017; Thong et al. 2019; Censor et al. 2011; Thong and Hieu 2018; Yang et al. 2018; Yang and Liu 2019) that can only solve monotone variational inequalities.
-
3.
Our algorithms added inertial terms, which accelerates the convergence speed of our algorithms without inertial terms. In addition, the proposed schemes use the Mann-type method to obtain strong convergence. Thus, the results obtained in this paper are preferable to the weakly convergent algorithms in the literature (see, e.g., He 1997; Solodov and Svaiter 1999; Tseng 2000; Censor et al. 2011; Malitsky 2015; Hieu et al. 2021) in infinite-dimensional Hilbert spaces.
3 Numerical experiments
In this section, we provide several numerical examples to demonstrate the efficiency of our algorithms compared to some known ones in Cai et al. (2021), Thong and Vuong (2019) and Thong et al. (2020). All the programs are implemented in MATLAB 2018a on a Intel(R) Core(TM) i5-8250S CPU @1.60 GHz computer with RAM 8.00 GB.
Example 3.1
Consider the linear operator \( M: \mathbb {R}^{m}\rightarrow \mathbb {R}^{m}\,(m=20) \) in the form \(M(x)=Sx+q\), where \(q\in \mathbb {R}^m\) and \(S=NN^{\mathsf {T}}+Q+D\), N is a \(m\times m\) matrix, Q is a \(m\times m\) skew-symmetric matrix, and D is a \(m\times m\) diagonal matrix with its diagonal entries being nonnegative (hence S is positive symmetric definite). The feasible set C is given by \(C=\left\{ x \in {\mathbb {R}}^{m}:-2 \le x_{i} \le 5, \, i=1, \ldots , m\right\} \). It is clear that M is monotone and Lipschitz continuous with constant \( L= \Vert S\Vert \). In this experiment, all entries of N, Q are generated randomly in \([-2,2]\), D is generated randomly in [0, 2] and \( q = \mathbf {0} \). It can be checked that the solution of the (VIP) is \( x^{*}=\{\mathbf {0}\} \). We apply the proposed algorithms to solve this problem. Take \( \phi =0.6 \), \( \epsilon _{n}=100/(n+1)^{2} \), \( \tau _{n}=1/(n+1) \) and \( \sigma _{n}=0.9(1-\tau _{n})\) for the suggested Algorithms 2.1–2.4. Choose \( \lambda _{1}=1 \), \( \mu =0.2 \) and \( \xi _{n}=1/(n+1)^{1.1} \) for the proposed Algorithms 2.1 and 2.3. Select \( \delta =2 \), \( \ell =0.5 \), \( \mu =0.2 \) for the stated Algorithms 2.2 and 2.4. The maximum number of iterations 500 is used as a common stopping criterion. We use \( D_{n}=\Vert x_{n}-x^{*}\Vert \) to measure the error of the nth iteration step. Figure 1 shows the numerical performance of the proposed algorithms for different parameter \( \beta \).

Numerical results of our algorithms with different \( \beta \) in Example 3.1
Example 3.2
Let \(\mathcal {H}=L^{2}([0,1])\) be an infinite-dimensional Hilbert space with inner product
and induced norm
Let r, R be two positive real numbers such that \(R/(k+1)<r/k<r<R\) for some \(k>1\). Take the feasible set as \(C=\{x \in \mathcal {H}:\Vert x\Vert \le r\}\). The operator \(M: \mathcal {H} \rightarrow \mathcal {H}\) is given by
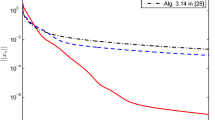
It is not hard to check that operator M is pseudomonotone rather than monotone. For the experiment, we choose \(R=1.5\), \(r=1\), \(k=1.1\). The solution of the (VIP) with M and C given above is \(x^{*}(t)=0 \). We compare the proposed Algorithms 2.1–2.4 with the Algorithm 2 introduced by Thong and Vuong (2019) (shortly, TV Alg. 2). Set \( \tau _{n}=1/(n+1) \) and \( \sigma _{n}=0.9(1-\tau _{n})\) for all algorithms. Choose \( \phi =0.3 \), \( \epsilon _{n}=100/(n+1)^{2} \) for the suggested Algorithms 2.1–2.4. Take \( \mu =0.4 \), \( \lambda _{1}=1 \) and \( \xi _{n}=1/(n+1)^{1.1} \) for the suggested Algorithms 2.1 and 2.3. Select \( \delta =1 \), \( \ell =0.5 \) and \( \mu =0.4 \) for the proposed Algorithm 2.2, Algorithm 2.4 and TV Alg. 2. The maximum number of iterations 50 is used as a common stopping criterion. The numerical behavior of the function \( D_{n}=\Vert x_{n}(t)-x^{*}(t)\Vert \) of all algorithms with four starting points \( x_{0}(t)=x_{1}(t) \) is shown in Fig. 2 and Table 1, where “CPU" in Table 1 indicates the execution time of all algorithms in seconds.

Numerical behavior of all algorithms at \( x_{0}(t)=x_{1}(t)=t^{4} \) for Example 3.2
Example 3.3
Consider the Hilbert space \(\mathcal {H}=l_{2}:=\{x=\left( x_{1}, x_{2}, \ldots , x_{i}, \ldots \right) \mid \sum _{i=1}^{\infty }\left| x_{i}\right| ^{2}<+\infty \}\) equipped with the inner product
and the induced norm
Let \(C:=\left\{ x\in \mathcal {H}:\left| x_{i}\right| \le {1}/{i}\right\} \). Define an operator \(M: C \rightarrow \mathcal {H}\) by
for some \(\alpha >0\). It can be verified that mapping M is pseudomonotone on \(\mathcal {H}\), uniformly continuous and sequentially weakly continuous on C, but not Lipschitz continuous on \(\mathcal {H}\) (see Thong et al. 2020, Example 1). In the following cases, we take \(\alpha =0.5\), \(\mathcal {H}=\mathbb {R}^{m}\) for different values of m. In these situations, the feasible set C is a box given by
We compare the proposed Algorithms 2.2 and 2.4 with several strongly convergent algorithms that can solve the (VIP) with uniformly continuous operators, including the Algorithm 3.1 introduced by Cai et al. (2021) (shortly, CDP Alg. 3.1) and the Algorithm 3 suggested by Thong et al. (2020) (shortly, TSI Alg. 3). Take \( \tau _{n}=1/(n+1) \), \( \delta =2 \), \( \ell =0.5 \), \( \mu =0.1 \) for all the algorithms. Select \( \sigma _{n}=0.9(1-\tau _{n})\), \( \phi =0.4 \) and \( \epsilon _{n}={100}/{(n+1)^2} \) for the suggested Algorithms 2.2 and 2.4. Set \( f(x)=0.1x \) for CDP Alg. 3.1 and TSI Alg. 3. The initial values \( x_{0}=x_{1}=5rand(m,1) \) are randomly generated by MATLAB. The maximum number of iterations 200 is used as a common stopping criterion. The numerical performance of the function \(D_{n}=\Vert x_{n}-x_{n-1}\Vert \) of all algorithms with four different dimensions is reported in Fig. 3 and Table 2, where “CPU” in Table 2 represents the execution time of all algorithms in seconds.

Numerical behavior of all algorithms at \( m=200000 \) for Example 3.3
Next, we use the proposed algorithms to solve the (VIP) that appears in optimal control problems. Assume that \(L_{2}\left( [0, T], \mathbb {R}^{m}\right) \) represents the square-integrable Hilbert space with inner product \(\langle p, q\rangle =\int _{0}^{T}\langle p(t), q(t)\rangle \,\mathrm {d} t\) and norm \(\Vert p\Vert =\sqrt{\langle p, p\rangle }\). The optimal control problem is described as follows:
where g(p) means the terminal objective function, \( \Phi \) is a convex and differentiable defined on the attainability set, p(t) denotes the control function, V represents a set of feasible controls composed of m piecewise continuous functions, x(t) stands for the trajectory, and \(Q(t) \in \mathbb {R}^{n \times n}\) and \(W(t) \in \mathbb {R}^{n \times m}\) are given continuous matrices for every \(t \in \) [0, T] . By the solution of problem (3.1), we mean a control \(p^{*}(t)\) and a corresponding (optimal) trajectory \(x^{*}(t)\) such that its terminal value \(x^{*}(T)\) minimizes objective function g(p) . It is known that the optimal control problem (3.1) can be transformed into a variational inequality problem (see Preininger and Vuong 2018; Vuong and Shehu 2019). We first use the classical Euler discretization method to decompose the optimal control problem (3.1) and then apply the proposed algorithms to solve the variational inequality problem corresponding to the discretized version of the problem (see Preininger and Vuong 2018; Vuong and Shehu 2019 for more details). In the proposed Algorithms 2.1–2.4, we set \( N=100 \), \( \phi =0.01 \), \( \epsilon _{n}={10^{-4}}/{(n+1)^2}\), \( \tau _{n}={10^{-4}}/{(n+1)} \) and \( \sigma _{n}=0.9(1-\tau _{n}) \). Pick \(\lambda _{1}=0.4\), \( \mu =0.5 \) and \( \xi _{n}=1/(n+1)^{1.1} \) for the proposed Algorithms 2.1 and 2.3. Select \( \delta =2 \), \( \ell =0.5 \) and \( \mu =0.5 \) for the suggested Algorithms 2.2 and 2.4. The initial controls \( p_{0}(t)=p_{1}(t) \) are randomly generated in \( [-1,1] \) and the stopping criterion is \(D_{n}=\left\| p_{n+1}-p_{n}\right\| \le 10^{-4} \).
Example 3.4
(Rocket car (Bressan and Piccoli 2007))
The exact optimal control of Example 3.4 is \( p^{*}(t)=1 \) if \( t \in [0,1.2) \) and \( p^{*}(t)=-1 \) if \( t \in (1.2,2] \). The approximate optimal control of the stated Algorithm 2.2 is plotted in Fig. 4a. Moreover, the numerical behavior of the proposed algorithms is shown in Fig. 4b.

Numerical results for Example 3.4
Remark 3.1
We have the following observations for Examples 3.1–3.4: (i) as can be seen in Examples 3.2 and 3.3, the algorithms proposed in this paper converge faster than some known methods in the literature (Cai et al. 2021; Thong and Vuong 2019; Thong et al. 2020), and these results are independent of the choice of initial values and the size of the dimensions (see Figs. 2, 3, Tables 1, 2); (ii) our four algorithms can obtain a faster convergence speed when the appropriate value of \( \beta \) is chosen; in other words, our algorithms can achieve a higher error accuracy when the two step sizes used in each iteration are different (i.e., \( \beta \ne 1 \)) than when they are the same (i.e., \( \beta =1 \)), see Figs. 1, 2, 3, 4 and Tables 1, 2; (iii) from Fig. 2 and Table 1, it can be seen that our Armijo-type Algorithms 2.2 and 2.4 take more computation time than the adaptive step size Algorithms 2.1 and 2.3, because the Armijo-type methods may take extra time to find a suitable step size in each iteration, while the adaptive step size type methods can use previously known information to automatically compute the next iteration step size; (iv) the proposed algorithms can work well in solving optimal control problems (see Fig. 4); and (v) notice that the operator M in Example 3.3 is non-Lipschitz continuous rather than Lipschitz continuous, which means that the algorithms proposed in the literature (see, e.g., Hieu et al. 2021; Shehu et al. 2019; Jolaoso et al. 2020; Thong et al. 2020; Yang 2021; Grad and Lara 2021) for solving Lipschitz continuous variational inequalities will not be available in this example. In summary, the iterative schemes suggested in this paper are useful, efficient and robust.
4 Conclusions
In this paper, we presented four new iterative schemes inspired by the inertial method, the subgradient extragradient method and the Mann-type method for solving the variational inequality problem with a pseudomonotone and Lipschitz continuous (or non-Lipschitz continuous) operator. Our algorithms use two non-monotonic step size criteria allowing them to work without the prior information about the Lipschitz constant of the operator. Strong convergence theorems of the proposed iterative algorithms are proved under some mild conditions in the framework of real Hilbert spaces. Finally, some numerical experimental results show the computational efficiency of the suggested methods compared to previously known schemes.
References
Bonacker E, Gibali A, Küfer KH (2020) Nesterov perturbations and projection methods applied to IMRT. J Nonlinear Var Anal 4:63–86
Bressan B, Piccoli B (2007) Introduction to the mathematical theory of control. American Institute of Mathematical Sciences, San Francisco
Cai G, Dong QL, Peng Y (2021) Strong convergence theorems for solving variational inequality problems with pseudo-monotone and non-Lipschitz operators. J Optim Theory Appl 188:447–472
Cegielski A (2012) Iterative methods for fixed point problems in Hilbert spaces, vol 2057. Lecture notes in mathematics. Springer, Heidelberg
Ceng LC, Shang M (2021) Hybrid inertial subgradient extragradient methods for variational inequalities and fixed point problems involving asymptotically nonexpansive mappings. Optimization 70:715–740
Censor Y, Gibali A, Reich S (2011) The subgradient extragradient method for solving variational inequalities in Hilbert space. J Optim Theory Appl 148:318–335
Censor Y, Gibali A, Reich S (2011) Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim Methods Softw 26:827–845
Cho SY (2020) A monotone Bregman projection algorithm for fixed point and equilibrium problems in a reflexive Banach space. Filomat 34:1487–1497
Cho SY (2020) A convergence theorem for generalized mixed equilibrium problems and multivalued asymptotically nonexpansive mappings. J Nonlinear Convex Anal 21:1017–1026
Cuong TH, Yao JC, Yen ND (2020) Qualitative properties of the minimum sum-of-squares clustering problem. Optimization 69:2131–2154
Grad SM, Lara F (2021) Solving mixed variational inequalities beyond convexity. J Optim Theory Appl 190:565–580
He BS (1997) A class of projection and contraction methods for monotone variational inequalities. Appl Math Optim 35:69–76
Hieu DV, Gibali A (2020) Strong convergence of inertial algorithms for solving equilibrium problems. Optim Lett 14:1817–1843
Hieu DV, Muu LD, Quy PK, Duong HN (2021) New extragradient methods for solving equilibrium problems in Banach spaces. Banach J. Math. Anal. 15:Article ID 8
Jolaoso LO, Taiwo A, Alakoya TO, Mewomo OT (2020) A strong convergence theorem for solving pseudo-monotone variational inequalities using projection methods. J Optim Theory Appl 185:744–766
Khan AA, Tammer C, Zalinescu C (2015) Regularization of quasi-variational inequalities. Optimization 64:1703–1724
Korpelevich GM (1976) The extragradient method for finding saddle points and other problems. Èkonom Mat Metody 12:747–756
Kraikaew R, Saejung S (2014) Strong convergence of the Halpern subgradient extragradient method for solving variational inequalities in Hilbert spaces. J Optim Theory Appl 163:399–412
Liu H, Yang J (2020) Weak convergence of iterative methods for solving quasimonotone variational inequalities. Comput Optim Appl 77:491–508
Malitsky Y (2015) Projected reflected gradient methods for monotone variational inequalities. SIAM J Optim 25:502–520
Malitsky Y (2020) Golden ratio algorithms for variational inequalities. Math Program 184:383–410
Mordukhovich BS (2018) Variational analysis and applications. Springer monographs in mathematics. Springer, Berlin
Preininger J, Vuong PT (2018) On the convergence of the gradient projection method for convex optimal control problems with bang-bang solutions. Comput Optim Appl 70:221–238
Reich S, Thong DV, Dong QL, Li XH, Dung VT (2021) New algorithms and convergence theorems for solving variational inequalities with non-Lipschitz mappings. Numer Algorithms 87:527–549
Saejung S, Yotkaew P (2012) Approximation of zeros of inverse strongly monotone operators in Banach spaces. Nonlinear Anal 75:742–750
Sahu DR, Yao JC, Verma M, Shukla KK (2021) Convergence rate analysis of proximal gradient methods with applications to composite minimization problems. Optimization 70:75–100
Shehu Y, Gibali A (2021) New inertial relaxed method for solving split feasibilities. Optimi Lett 15:2109–2126
Shehu Y, Iyiola OS (2017) Strong convergence result for monotone variational inequalities. Numer Algorithms 76:259–282
Shehu Y, Yao JC (2020) Rate of convergence for inertial iterative method for countable family of certain quasi-nonexpansive mappings. J Nonlinear Convex Anal 21:533–541
Shehu Y, Dong QL, Jiang D (2019) Single projection method for pseudo-monotone variational inequality in Hilbert spaces. Optimization 68:385–409
Shehu Y, Iyiola OS, Li XH, Dong QL (2019) Convergence analysis of projection method for variational inequalities. Comput Appl Math 38:Article ID 161
Solodov MV, Svaiter BF (1999) A new projection method for variational inequality problems. SIAM J Control Optim 37:765–776
Tan B, Cho SY (2021) Inertial extragradient methods for solving pseudomonotone variational inequalities with non-Lipschitz mappings and their optimization applications. Appl Set-Valued Anal Optim 3:165–192
Tan B, Fan J, Li S (2021) Self-adaptive inertial extragradient algorithms for solving variational inequality problems. Comput Appl Math 40:Article ID 19
Thong DV, Hieu DV (2018) Weak and strong convergence theorems for variational inequality problems. Numer Algorithms 78:1045–1060
Thong DV, Vuong PT (2019) Modified Tseng’s extragradient methods for solving pseudo-monotone variational inequalities. Optimization 68:2207–2226
Thong DV, Vinh NT, Cho YJ (2019) Accelerated subgradient extragradient methods for variational inequality problems. J Sci Comput 80:1438–1462
Thong DV, Hieu DV, Rassias TM (2020) Self adaptive inertial subgradient extragradient algorithms for solving pseudomonotone variational inequality problems. Optim Lett 14:115–144
Thong DV, Shehu Y, Iyiola OS (2020) A new iterative method for solving pseudomonotone variational inequalities with non-Lipschitz operators. Comput Appl Math 39:Article ID 108
Thong DV, Shehu Y, Iyiola OS (2020) Weak and strong convergence theorems for solving pseudo-monotone variational inequalities with non-Lipschitz mappings. Numer Algorithms 84:795–823
Tseng P (2000) A modified forward-backward splitting method for maximal monotone mappings. SIAM J Control Optim 38:431–446
Vuong PT, Shehu Y (2019) Convergence of an extragradient-type method for variational inequality with applications to optimal control problems. Numer Algorithms 81:269–291
Yang J (2021) Self-adaptive inertial subgradient extragradient algorithm for solving pseudomonotone variational inequalities. Appl Anal 100:1067–1078
Yang J, Liu H (2019) Strong convergence result for solving monotone variational inequalities in Hilbert space. Numer Algorithms 80:741–752
Yang J, Liu H, Liu Z (2018) Modified subgradient extragradient algorithms for solving monotone variational inequalities. Optimization 67:2247–2258
Acknowledgements
The authors are very grateful to the anonymous referees for their valuable suggestions, which helped us to present this paper in a better way.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by Gabriel Haeser.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Tan, B., Li, S. & Qin, X. On modified subgradient extragradient methods for pseudomonotone variational inequality problems with applications. Comp. Appl. Math. 40, 253 (2021). https://doi.org/10.1007/s40314-021-01642-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-021-01642-z
Keywords
- Variational inequality
- Optimal control
- Extragradient method
- Pseudomonotone mapping
- Non-Lipschitz operator