
Abstract
Several iterative methods have been proposed in the literature for solving the variational inequalities in Hilbert or Banach spaces, where the underlying operator A is monotone and Lipschitz continuous. However, there are very few methods known for solving the variational inequalities, when the Lipschitz continuity of A is dispensed with. In this article, we introduce a projection-type algorithm for finding a common solution of the variational inequalities and fixed point problem in a reflexive Banach space, where A is pseudo-monotone and not necessarily Lipschitz continuous. Also, we present an application of our result to approximating solution of pseudo-monotone equilibrium problem in a reflexive Banach space. Finally, we present some numerical examples to illustrate the performance of our method as well as comparing it with related method in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In 1959, A. Signorini posed a contact problem (well known as “Signorini Problem”), which was reformulated as VI by Fichera [1] in 1963. In 1964, the first cornerstone for the theory of VI was recorded by Stampacchia [2]. Later in 1966, Hartman and Stampacchia [3] proved the first existence theorem for the solution of the VI. In 1967, the first exposition result for the existence and uniqueness of solution of the VI appeared in the work of Lion and Stampacchia [4]. Since then, the VI has served as an important tool in studying a wide class of unilateral optimization problems arising in several branches of pure and applied sciences in a general framework (see, for example, [5]). Several methods have also been developed for solving a VI (1) and related optimization problems; see [6,7,8] and references therein.
One of the important methods for solving the VI is the extragradient method (EM) introduced by Korpelevich [9] (also by Antipin [10] independently) for solving VI in a finite dimensional space. The EM requires two projections onto the feasible set C and two evaluations of A per each iteration (a fact which affect the usage of the EM). This method was further extended to infinite-dimensional spaces by many authors; see, for example, [11]. In order to improve the EM, Censor et al. [12] introduced a subgradient extragradient method (SEM), which involves only one projection onto the feasible set and another projection onto a constructible half-space. The weak convergence of the SEM was proved in [12] and, by modifying the SEM with Halpern iterative scheme (see [13, 14]), some authors proved the strong convergences of the SEM under certain mild conditions (see, for instance, [12, 15,16,17]).
An obvious disadvantage of the EM and SEM is the assumption that the underlying operator A admits a Lipschitz constant, which is known or can be estimated. In fact, in many problems, operators may not satisfy the Lipschitz condition. Iusem and Svaiter [18] introduced a projection-type algorithm, which does not require the Lipschitz continuity of A and proved a weak convergence result for approximating solutions of VI (1) in a finite dimensional space, where A is a monotone operator. The projection method was later extended to an infinite dimensional Hilbert space by Bello Cruz and Iusem [19]. Recently, Kanzow and Shehu [20] proved a strong convergence theorem for solving VI (1) by combining the projection method with a Halpern method in a real Hilbert space H. Very recently, Gibali [21] proposed a new Bregman projection method for solving the VI in a Hilbert space. Gibali’s algorithm is an extension of the SEM with Bregman projection, which makes only one projection per iteration. The Bregman projection is well known as a generalization of the metric projection. Several other alternatives to the EM or its modifications have also been proposed in the literature by many authors; see, for example, [7, 22, 23] and references there in.
It is worth mentioning that many important real life problems are generally defined in Banach spaces. Hence, it is of interest to consider solving the VI in a Banach space, which is more general than the Hilbert space. Some recent attempts in this direction are the works of Cai et al. [24] and Chidume and Nnakwe [25] in a 2-uniformly convex and uniformly smooth Banach space E. It is also important to find the solutions of variational inequalities, which are also the fixed point of a particular mapping due to its possible application to mathematical models, whose constraint can be expressed as fixed point and variational inequalities. This happens, in particular, in the practical problems such as signal processing, network resource allocation and image recovery; see, for instance, [26,27,28].
Motivated by the works of Gibali [21], Cai et al. [24], Chidume and Nnakwe [25] and Kanzow and Shehu [20], in this paper, we present a new projection-type algorithm for approximating a common solution of VI (1) and fixed point of Bregman quasi-nonexpansive mapping in a real reflexive Banach space. We also take A to be a pseudo-monotone operator and prove a strong convergence theorem for the sequence generated by our algorithm. This result extends and generalizes many other results in the literature.
2 Preliminaries
In this section, we present some basic notions and results that are needed in the sequel. Throughout this paper, \(E^*\) denotes the dual space of a Banach space E and C is a nonempty, closed and convex subset of E. The norm and the duality pairing between E and \(E^*\) are denoted by \(||\cdot ||\) and \(\langle \cdot ,\cdot \rangle ,\) respectively. Also, the strong and weak convergence of a sequence \(\{x_n\} \subseteq E\) to a point \(p \in E\) are denoted by \(x_n \rightarrow p\) and \(x_n \rightharpoonup p,\) respectively.
Let \(f:E \rightarrow ]-\infty ,+\infty ]\) be a proper, convex and lower semicontinuous function. The Fenchel conjugate of f is the functional \(f^*:E^{*} \rightarrow ]-\infty ,+\infty ]\) defined by \(f^*(\xi ) = \sup \{\langle \xi ,x\rangle - f(x): x \in E\}.\)
The domain of f is defined by \(\hbox {dom}f:= \{x \in E: f(x) < +\infty \}\) and if \(\hbox {dom}f \ne \emptyset \), we say that f is proper.
Let \(x \in \) int(\(\hbox {dom}f\)), for any \(y \in E\), the directional derivative of f at x is defined by \( f^{o}(x,y) = \lim _{t \downarrow 0}\dfrac{f(x+ty)-f(x)}{t}. \) If the limit as \({t \downarrow 0}\) exists for each y, then f is said to be Gâteaux differentiable at x. When the limit as \({t \downarrow 0}\) is attained uniformly for any \(y \in E\) with \(||y||=1\), we say that f is Fréchet differentiable at x. Throughout this paper, we take f to be an admissible function, i.e., a proper, convex and lower semicontinuous function. Under this condition, we know that f is continuous in int(\(\hbox {dom}f\)); see, [29].
Let E be a reflexive Banach space. The function f is called Legendre if and only if it satisfies the following two conditions:
-
(L1)
f is Gâteaux differentiable, int(dom \(f) \ne \emptyset \) and dom \(\nabla f\) = int(dom f),
-
(L2)
\(f^*\) is Gâteaux differentiable, int(dom \(f^*) \ne \emptyset \) and dom \(\nabla f^*\) = int(dom \(f^*)\).
Since E is reflexive, we know that \( (\nabla f)^{-1}= \nabla f^*\), this together with conditions (L1) and (L2) implies that \( ran \nabla f = dom \nabla f^* = int(domf^*) \quad \text {and}\quad ran \nabla f^* = dom \nabla f = int(domf).\)
The variational inequalities (VI) is defined as finding a point \(x^{*} \in C\) such that
where \(A: E \rightarrow E^*\) is a single-valued mapping. The set of solutions of a VI is denoted by VI(C, A).
Definition 2.1
[30] The operator A is said to be
-
(a)
strongly monotone on C, if there exists \(\gamma >0\) such that \(\langle Au - Av, u-v\rangle \ge \gamma ||u-v||^2 \quad \forall ~~ u,v \in C;\)
-
(b)
monotone on C, if \(\langle Au-Av, u-v \rangle \ge 0 \quad \forall ~~u,v \in C;\)
-
(c)
strongly pseudo-monotone on C, if there exists \(\gamma >0\) such that
$$\begin{aligned} \langle Au, v-u \rangle \ge 0 \Rightarrow \langle Av, v-u \rangle \ge \gamma ||u-v||^2, \quad \text {for all}\ u,v \in C; \end{aligned}$$ -
(d)
pseudo-monotone on C, if for all \(u,v \in C\)\(\langle Au,v-u\rangle \ge 0 \Rightarrow \langle Av,v-u \rangle \ge 0;\)
Remark 2.1
It is easy to see that the following implications hold: (a) \(\Rightarrow \) (b) \(\Rightarrow \) (d) and (a) \(\Rightarrow \) (c) \(\Rightarrow \) (d) .
Recall that a point \(x \in C\) is called a fixed point of an operator \(T:C\rightarrow C,\) if \(Tx =x.\) We shall denote the set of fixed points of T by F(T). It is well known that in a real Hilbert space, \(x^{*}\) solves the VI (1) if and only if \(x^{*}\) solves the fixed point equation \(x^{*} = P_C(x^{*} - \lambda Ax^{*}), \) or equivalently, \(x^{*}\) solves the residual equation
where \(\lambda >0\) and \(P_C\) is the metric projection from H onto C. Hence, the knowledge of fixed point algorithms can be used to solve the VI (1); see, for example, [6].
Definition 2.2
Let \(f:E \rightarrow {\mathbb {R}}\cup \{+ \infty \}\) be a Gâteaux differentiable function. The function
\(D_f:\)\(\hbox {dom}f \times \) int(\(\hbox {dom}f) \rightarrow [0, +\infty [\) defined by
is called the Bregman distance with respect to f (see, [31, 32]). The Bregman distance does not satisfy the well-known properties of a metric, but it has the following important property, called three point identity (see, [29]): for any \(x \in \)\(\hbox {dom}f\) and \(y,z \in \) int(\(\hbox {dom}f\)),
Definition 2.3
Let \(f:E \rightarrow ]-\infty ,+\infty ]\) be a convex and G\({\hat{a}}\)teaux differentiable function. The function f is called:
-
(i)
totally convex at x if its modulus of totally convexity at \(x \in \) int(\(\hbox {dom}f\)), that is, the bifunction \(v_f:\) int(\(\hbox {dom}f) \times [0, +\infty [ \rightarrow [0, + \infty [\) defined by \(v_f(x,t):= \inf \{D_f(y,x): y \in dom f, ||y-x||=t\} \) is positive for any \(t>0.\)
-
(ii)
cofinite if \(\hbox {dom}f^*=E^*\); coercive if \(\lim \limits _{||x|| \rightarrow +\infty }\Big (\frac{f(x)}{||x||}\Big )= +\infty ;\) and sequentially consistent if for any two sequences \(\{x_n\}\) and \(\{y_n\}\) in E such that \(\{x_n\}\) is bounded, \( \lim \limits _{n \rightarrow \infty }D_f(y_n,x_n)=0 \Rightarrow \lim \limits _{n \rightarrow \infty }||y_n-x_n||=0. \) For further details and examples on totally convex functions; see, [33,34,35,36].
Remark 2.2
[36, 37] The function \(f:E\rightarrow {\mathbb {R}}\) is totally convex on bounded subsets, if and only if it is sequentially consistent. Also, if f is Fréchet differentiable and totally convex, then, f is cofinite.
The function \(V_f: E \times E^* \rightarrow [0,\infty [\) associated with f is defined by
\(V_f\) is non-negative and \(V_f(x,x^*) = D_f(x, \nabla f^*(x^*))\) for all \(x \in E\) and \(x^* \in E^*\). It is known that \(V_f\) is convex in the second variable, i.e., for all \(z \in E,\)\(D_f\Big (z, \nabla f^*(\sum \nolimits _{i=1}^Nt_i \nabla f(x_i))\Big ) \le \sum \nolimits _{i=1}^N t_i D_f(z,x_i), \) where \(\{x_i\} \subset E\) and \(\{t_i\} \subset ]0,1[\) with \(\sum \nolimits _{i=1}^N t_i =1\).
The Bregman projection \(Proj_C^f:\) int(\(\hbox {dom}f\))\( \rightarrow C\) is defined as the necessarily unique vector \(\hbox {Proj}_C^f(x) \in C\) satisfying \(D_f(Proj_C^f(x),x) = \inf \{D_f(y,x):y\in C \}.\) The Bregman projection is characterized by the following properties (see, [38]): for \(x \in \)int(\(\hbox {dom}f\)) and \({\hat{x}} \in C\), then the following conditions are equivalent:
-
(i)
the vector \({\hat{x}}\) is the Bregman projection of x onto C, with respect to f,
-
(ii)
the vector \({\hat{x}}\) is the unique solution of the variational inequality
$$\begin{aligned} \langle \nabla f(x)- \nabla f(z), z-y \rangle \ge 0 \qquad \forall y\in C, \end{aligned}$$(4) -
(iii)
the vector \({\hat{x}}\) is the unique solution of the inequality
$$\begin{aligned} D_f(y,z)+D_f(z,x) \le D_f(y,x)\qquad \forall y \in C. \end{aligned}$$(5)
A point \(x^* \in C\) is said to be an asymptotic fixed point of T if C contains a sequence \(\{x_n\}_{n=1}^\infty ,\) which converges weakly to \(x^*\) and \(\lim \limits _{n \rightarrow \infty }||x_n- Tx_n||=0\) (see, [39]). The set of asymptotic fixed points of T is denoted by \({\hat{F}}(T)\). A mapping \(T: C \rightarrow \) int(dom f) is called
-
(i)
Bregman Firmly Nonexpansive (BFNE for short) if
$$\begin{aligned} \langle \nabla f(Tx) - \nabla f(Ty), Tx-Ty \rangle \le \langle \nabla f(x)- \nabla f(y), Tx-Ty \rangle \qquad \forall x,y \in C.\nonumber \\ \end{aligned}$$(6) -
(ii)
Bregman quasi-nonexpansive (BQNE) if \(F(T) \ne \emptyset \) and \( D_f(p,Tx) \le D_f(p,x) \qquad \forall x \in C, p \in F(T). \)
It is easy to see that if \({\hat{F}}(T)= F(T) \ne \emptyset \), then \(BFNE \subset BQNE.\)
Definition 2.4
(see, [40]) The Minty Variational Inequality (MVI) is defined as finding a point \({\bar{x}} \in C\) such that \( \langle Ay, y - {\bar{x}} \rangle \ge 0, \quad \forall y \in C. \) We denote by M(C, A), the set of solution of MVI. Some existence results for the MVI have been presented in [41].
Lemma 2.1
(see, p. 69, Proposition 2.9 of [42]) Let f be a totally convex and Gâteaux differentiable such that \(\hbox {dom}f = E\). Then for all \(x^* \in E^{*}\setminus \{0\}\), \({\tilde{y}} \in E\), \(x \in H^{+}\) and \({\bar{x}} \in H^{-}\), it holds that
where \(z = argmin_{y \in H}D_f(y,x)\) and \(H = \{y \in E:\langle x^*,y - {\tilde{y}} \rangle = 0\}\), \(H^{+} = \{y \in E: \langle x^*, y-{\tilde{y}} \rangle \ge 0\}\) and \(H^{-} = \{y \in E: \langle x^*, y - {\tilde{y}} \rangle \le 0\}\).
3 Main Results
In this section, we give a precise statement of our projection-type method and discuss some of its convergence analysis.
Let E be a real reflexive Banach space and let C be a nonempty, closed and convex subset of E. Let \(f: E \rightarrow {\mathbb {R}}\) be a coercive, Legendre function which is bounded, uniformly Fréchet differentiable and totally convex on bounded subsets of E such that \(C \subset int(domf)\). Let \(A: E \rightarrow E^{*}\) be a continuous pseudo-monotone operator and \(T:C \rightarrow C\) be a Bregman quasi-nonexpansive mapping such that \(\varGamma := VI(C,A) \cap F(T) \ne \emptyset \). Let \(\{\alpha _n\}\) and \(\{\beta _n\}\) be nonnegative sequences in ]0, 1[.

Remark 3.1
Note that if \(x_n - Proj_C^f(z_n) =0\) and \(x_n - Tx_n =0\), then we are at a common solution of the VI (1) and fixed point of the Bregman quasi-nonexpansive mapping. In our convergence analysis, we will implicitly assume that this does not occur after finitely many iterations so that Algorithm 3.1 generates an infinite sequences.
We first show that Algorithm 3.1 is well defined. To do this, it is sufficient to show that the inner loop in the stepsize rule in Step 2 is well defined.
Lemma 3.1
-
(i)
The stepsize process in Step 2 of Algorithm 3.1 is well defined.
-
(ii)
Let \(\{x_n\}\) and \(\{y_n\}\) be sequences generated by Algorithm 3.1, then \(\langle Ay_n, x_n -y_n \rangle > 0.\)
Proof
-
(i)
Assume that (8) does not hold for \(n \in {\mathbb {N}}\). This implies that
$$\begin{aligned} \langle Ay_n(t_n), x_n - Proj_C^fz_n \rangle < \dfrac{\sigma D_f(Proj_C^fz_n,x_n)}{\lambda _n} \quad for~~n \in {\mathbb {N}}. \end{aligned}$$Thus, we have
$$\begin{aligned} \langle A((1-s \gamma ^m)x_n + s\gamma ^m Proj_C^f z_n), x_n - Proj_C^fz_n \rangle < \dfrac{\sigma D_f(Proj_C^f z_n,x_n)}{\lambda _n} \quad \forall m \ge 0. \end{aligned}$$Since A is continuous and \(y_n(t_n) \rightarrow x_n\) as \(m \rightarrow \infty \), it follows that
$$\begin{aligned} \langle \lambda _n Ax_n, x_n -Proj_C^fz_n \rangle < \sigma D_f(Proj_C^fz_n,x_n), \end{aligned}$$equivalently, by (7), we have
$$\begin{aligned} \langle \nabla f(x_n) - \nabla f(z_n), x_n - Proj_C^fz_n \rangle < \sigma D_f(Proj_C^fz_n,x_n). \end{aligned}$$Applying the three point identity (3) to the left-hand side of the above inequality, we obtain
$$\begin{aligned} D_f(Proj_C^fz_n,x_n) +D_f(x_n,z_n) - D_f(Proj_C^fz_n,z_n) < \sigma D_f(Proj_C^fz_n,x_n). \end{aligned}$$Since f is strictly convex and \(\sigma \in (0,1)\), then \(D_f(x_n,z_n) < D_f(Proj_C^fz_n,z_n).\) This contradicts the definition of the Bregman projection. Hence, the stepsize rule in Step 2 of Algorithm 3.1 is well defined.
-
(ii)
Furthermore, from (8), we have
$$\begin{aligned} \langle Ay_n, x_n - y_n \rangle= & {} \langle Ay_n, x_n - (1-t_n)x_n - t_n Proj_C^f z_n \rangle = t_n \langle Ay_n, x_n - Proj_C^fz_n \rangle \\\ge & {} \dfrac{\sigma t_n D_f(Proj_C^f z_n,x_n)}{\lambda _n} > 0. \end{aligned}$$
\(\square \)
In order to establish our main result, we make the following assumptions:
-
(C1)
\(\lim \limits _{n\rightarrow \infty }\alpha _n = 0\) and \(\sum \limits _{n=0}^\infty \alpha _n = \infty \).
-
(C2)
\(0< \liminf \limits _{n\rightarrow \infty }\beta _n \le \limsup \limits _{n \rightarrow \infty }\beta _n < 1\).
We proceed to prove the following lemmas before proving the convergence of our main Algorithm 3.1.
Lemma 3.2
The sequence \(\{x_n\}\) generated by Algorithm 3.1 is bounded.
Proof
For each \(n \in {\mathbb {N}},\) define the sets:
Let \(p \in \varGamma \), then since A is pseudo-monotone, we have \(\langle Ap, x - p \rangle \ge 0 \Rightarrow \langle Ax, x-p \rangle \ge 0 \quad \forall x \in E.\) This implies that \(p \in Q_n^{-}\) for all \(n \in {\mathbb {N}}\). Furthermore, since we implicitly assumed that Algorithm 3.1 does not terminate after finitely many steps with an exact solution, we have from Lemma 3.1(ii) that \(\langle Ay_n, x_n - y_n \rangle > 0\). This implies that \(x_n \in Q_n^{+}\) and \(x_n \notin Q_n^{-}\) for all \(n \in N\). Therefore, using Lemma 2.1, we obtain
Now, since \(v_n = Proj_C^f(u_n)\), then from (5), we have
Combining (10) and (11), we have
This implies that
From (9) and (12), we have
Hence \(\{D_f(p,x_n)\}\) is bounded. Then by using Lemma 3.1 of [37], p. 31, we obtain \(\{x_n\}\) is bounded. Consequently, \(\{y_n\}\), \(\{Ay_n\}\), \(\{u_n\}\), \(\{v_n\}\) and \(\{Tv_n\}\) are bounded. \(\square \)
Lemma 3.3
Let \(\{x_n\}\), \(\{y_n\}\), \(\{z_n\}\) and \(\{u_n\}\) be sequences generated by Algorithm 3.1. Suppose there exist subsequences \(\{x_{n_k}\}\) and \(\{u_{n_k}\}\) of \(\{x_n\}\) and \(\{u_n\}\) respectively such that \(\lim \limits _{k \rightarrow \infty }||x_{n_k} - u_{n_k}|| = 0\). Let \(\{y_{n_k}\}\) and \(\{z_{n_k}\}\) be subsequences of \(\{y_n\}\) and \(\{z_n\}\) respectively, then
-
(a)
\(\lim \limits _{k\rightarrow \infty }\langle Ay_{n_k}, x_{n_k} - y_{n_k} \rangle = 0,\)
-
(b)
\(\lim \limits _{k \rightarrow \infty }||Proj_C^f(z_{n_k}) - x_{n_k}|| = 0,\)
-
(c)
\(0 \le \liminf \limits _{k \rightarrow \infty }\langle Ax_{n_k}, x - x_{n_k} \rangle ,\) for all \(x \in C\).
Proof
-
(a)
Since \(u_n \in Q_n\), then we have \(0 = \langle Ay_{n_k}, u_{n_k} - y_{n_k} \rangle = \langle Ay_{n_k}, u_{n_k} - x_{n_k} \rangle + \langle Ay_{n_k}, x_{n_k} - y_{n_k} \rangle ,\) which implies that
$$\begin{aligned} \langle Ay_{n_k}, x_{n_k} - y_{n_k} \rangle= & {} \langle Ay_{n_k}, x_{n_k} - u_{n_k} \rangle \le ||Ay_{n_k}||_{*}||x_{n_k}-u_{n_k}||. \end{aligned}$$Taking the limit of the above inequality as \(k \rightarrow \infty \) yields \(\lim \limits _{k \rightarrow \infty }\langle Ay_{n_k}, x_{n_k} -y_{n_k} \rangle = 0.\)
-
(b)
Let \(\{t_{n_k}\}\) be a subsequence of \(\{t_n\}\). We consider the following two cases based on the behaviour of \(t_{n_k}\).
Case I: Suppose \(\lim \limits _{k \rightarrow \infty }t_{n_k} \ne 0\); i.e., there exists some \(\delta >0\) such that \(t_{n_k} \ge \delta >0\) for all \(k \in {\mathbb {N}}\). It follows from Step 2 of Algorithm 3.1 that \(\langle Ay_{n_k}, x_{n_k} - y_{n_k} \rangle \ge \dfrac{\sigma D_f(Proj_C^fz_{n_k}, x_{n_k})}{\lambda _n} .\) Hence, from Lemma 3.3(a), we have \(\lim \limits _{k\rightarrow \infty }D_f(Proj_C^fz_{n_k}, x_{n_k}) = 0\Rightarrow \lim \limits _{k \rightarrow \infty } ||Proj_C^fz_{n_k} - x_{n_k}|| = 0.\)
Case II: On the other hand, suppose \(t_{n_k} \rightarrow 0\) as \(k \rightarrow \infty \). Let \(t_{n_k} <s\) so that the stepsize get reduced at least once for all iterations belonging to this subsequence. This implies that the trial stepsize does not satisfy the test from Step 2 of Algorithm 3.1. Assume that \(\lim \limits _{k \rightarrow \infty }D_f(Proj_C^fz_{n_k},x_{n_k}) \ne 0,\) i.e., there exists a positive constant \(\delta < +\infty \) such that \(\limsup \limits _{k\rightarrow \infty }(Proj_C^fz_{n_k},x_{n_k}) = \delta .\)
Define \({\bar{y}}_k = (1-t_{n_k})x_{n_k} + t_{n_k} Proj_C^f(z_{n_k})\). Then \({\bar{y}}_k - x_{n_k} = t_{n_k}(Proj_C^fz_{n_k} - x_{n_k}).\) Since \(\{Proj_C^fz_{n_k} - x_{n_k}\}\) is bounded and \(t_{n_k} \rightarrow 0\) as \(k \rightarrow \infty \), it follows that \(\lim \limits _{k \rightarrow \infty }||{\bar{y}}_k - x_{n_k}||= 0\). From the stepsize rule in Step 2 and the definition of \({\bar{y}}_k\), we have \(\langle A{\bar{y}}_k, x_{n_k} - Proj_C^f z_{n_k} \rangle < \dfrac{\sigma D_f(Proj_C^fz_{n_k}, x_{n_k})}{\lambda _{n_k}} \quad \forall k \in {\mathbb {N}}.\) Since A is uniformly continuous on bounded subsets of C and \(\sigma \in (0,1)\), we obtain that there exists \(N \in {\mathbb {N}}\) such that
Therefore
Using the three points identity (3) in the last inequality, we get
Hence \(D_f(x_{n_k}, z_{n_k}) < D_f(Proj_C^fz_{n_k}, z_{n_k}) \quad \forall k \ge N.\) This contradicts the definition of the Bregman projection. Hence \(\lim _{k \rightarrow \infty } D_f(Proj_C^fz_{n_k}, x_{n_k}) = 0.\) Therefore, by using Proposition 2.5 in [36], we obtain that \(\lim \limits _{k \rightarrow \infty }||Proj_C^fz_{n_k} - x_{n_k}|| = 0.\)
(c) From (4), we have that \(\langle \nabla f(z_{n_k}) - \nabla f(Proj_C^f z_{n_k}), y - Proj_C^fz_{n_k} \rangle \le 0 \quad \forall y \in C.\) This implies from (7) that
Therefore
Thus, we have from (b) that \(\lim \limits _{k \rightarrow \infty }||\nabla f(Proj_C^f(z_{n_k})) - \nabla f(x_{n_k})||_{*} = 0.\) Taking the limit of the inequality in (13) and noting that \(\{\lambda _{n_k}\} \subset [a,b]\), we have \(0 \le \liminf \limits _{k \rightarrow \infty } \langle Ax_{n_k}, y - x_{n_k} \rangle \quad \forall y \in C.\)\(\square \)
Lemma 3.4
The sequence \(\{x_n\}\) generated by Algorithm 3.1 satisfies the following estimates:
-
(i)
\(s_{n+1} \le (1-\alpha _n)s_n + \alpha _nb_n\),
-
(ii)
\(-1 \le \limsup \limits _{n \rightarrow \infty }b_n < + \infty \),
where \(p \in \varGamma \), \(s_n = D_f(p, x_{n})\), \(b_n = \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle .\)
Proof
-
(i)
Let \(w_n = \nabla f^*(\beta _n \nabla f(v_n) + (1-\beta _n)\nabla f(Tv_n))\) and \(p \in \varGamma \), then from (9), we have
$$\begin{aligned} D_f(p, x_{n+1})= & {} D_f(p, \nabla f^*(\alpha _n \nabla f(u) + (1-\alpha _n)\nabla f (w_n))) \nonumber \\\le & {} V_f \Big ( p, \alpha _n \nabla f(u) + (1-\alpha _n)\nabla f(w_n) - \alpha _n(\nabla f(u) - \nabla f(p)) \Big ) \nonumber \\&+ \langle \alpha _n (\nabla f(u) - \nabla f(p)), x_{n+1} - p \rangle \nonumber \\= & {} V_f\Big (p, \alpha _n \nabla f(p) +(1-\alpha _n) \nabla f(w_n) \Big ) + \alpha _n \langle \nabla f(u) \nonumber \\&- \nabla f(p), x_{n+1} - p \rangle \nonumber \\\le & {} (1-\alpha _n)D_f(p,w_n) + \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle \end{aligned}$$(14)$$\begin{aligned}= & {} (1-\alpha _n)\Big ( D_f(p, \nabla f^*(\beta _n \nabla f(v_n) + (1-\beta _n)\nabla f(Tv_n))) \Big ) \nonumber \\&+ \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle \nonumber \\\le & {} (1-\alpha _n)\beta _n D_f(p, v_n) + (1-\alpha _n)(1-\beta _n)D_f(p,Tv_n) \nonumber \\&+ \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle \nonumber \\\le & {} (1-\alpha _n)D_f(p,v_n) + \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle . \end{aligned}$$(15)Therefore from (12), we have
$$\begin{aligned} D_f(p, x_{n+1})\le & {} (1-\alpha _n)\Big ( D_f(p,x_n) -D_f(v_n,u_n) - D_f(u_n,x_n) \Big ) \nonumber \\&+ \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle . \end{aligned}$$(16)Since \(\{\alpha _n\} \subset ]0,1[\), then
$$\begin{aligned} D_f(p,x_{n+1}) \le (1-\alpha _n)D_f(p,x_{n}) + \alpha _n \langle \nabla f(u) - \nabla f(p), x_{n+1} - p \rangle . \end{aligned}$$(17)This established (i).
-
(ii)
Since \(\{x_{n}\}\) is bounded, then we have
$$\begin{aligned} \sup _{n \ge 0} b_n\le \sup ||\nabla f(u) - \nabla f(p)||_{*}||x_{n+1}-p|| < \infty . \end{aligned}$$This implies that \(\limsup \limits _{n \rightarrow \infty }b_n < \infty \). Next, we show that \(\limsup \limits _{n \rightarrow \infty }b_n \ge -1.\) Assume the contrary, i.e. \(\limsup \limits _{n \rightarrow \infty }b_n < -1\). Then there exists \(n_0 \in {\mathbb {N}}\) such that \(b_n < -1\), for all \(n \ge n_0\). Then for all \(n \ge n_0\), we get from (i) that
$$\begin{aligned} s_{n+1}\le & {} (1-\alpha _n)s_n + \alpha _n b_n < (1-\alpha _n)s_n - \alpha _n = s_n - \alpha _n(s_n +1) \le s_n - \alpha _n. \end{aligned}$$Taking \(\limsup \) of the last inequality, we have
$$\begin{aligned} \limsup _{n \rightarrow \infty }s_{n} \le s_{n_0} - \lim _{n\rightarrow \infty }\sum _{i = n_0}^n \alpha _i = - \infty . \end{aligned}$$This contradicts the fact that \(\{s_n\}\) is a non-negative real sequence. Therefore \(\limsup \limits _{n \rightarrow \infty }b_n \ge -1\).
\(\square \)
We are now in position to state and prove our main theorem.
Theorem 3.1
Let \(\{x_n\}\) be the sequence generated by Algorithm 3.1. Then, \(\{x_n\}\) converges strongly to a point \({\bar{x}} = Proj_\varGamma ^f(u)\), where \(Proj_\varGamma ^f\) is the Bregman projection from C onto \(\varGamma \).
Proof
Let \(p \in \varGamma \), and denote \(D_f(p,x_{n})\) by \(\varPhi _{n}\). We consider the following two possible cases.
CASE A: Suppose there exists \(n_0 \in {\mathbb {N}}\) such that \(\varPhi _{n}\) is monotonically nonincreasing for all \(n \ge n_0\). Since \(\varPhi _{n}\) is bounded, then it is convergent and so \(\varPhi _{n} - \varPhi _{n+1} \rightarrow 0\) as \(n \rightarrow \infty \).
We first show that \(||x_n -u_n|| \rightarrow 0,\)\(||v_n - Tv_n|| \rightarrow 0\) and \(||x_{n+1} - x_{n}|| \rightarrow 0\) as \(n \rightarrow \infty \). Since \(\{\alpha _n\} \subset (0,1)\), we obtain from (16) that
Using condition(C1), we obtain that \(D_f(u_n,x_n) \rightarrow 0\) as \(n \rightarrow \infty \). Using Lemma 3.1 in [37], p. 31, we have
Similarly from (16), we can obtain
Recall that \(w_n = \nabla f^*(\beta _n \nabla f(v_n) + (1-\beta _n)\nabla f(Tv_n))\). Thus, we have
Thus from (12), (14) and (20), we have
Hence
It follows from conditions (C1), (C2) and the properties of \(\rho _r\) that
Since f is uniformly Fréchet differentiable on bounded subsets of E, it is also uniformly continuous and \(\nabla f\) is norm-to-norm uniformly continuous on bounded subsets of E, hence from (21), we have
In addition, it is easy to see from definition of Bregman distance that \(D_f(v_n,Tv_n) \rightarrow 0\) as \(n \rightarrow \infty \). Thus
This implies that \( \lim \limits _{n \rightarrow \infty }||v_n - x_{n+1}|| = 0 \Rightarrow \lim \limits _{n \rightarrow \infty }\Vert x_{n+1}- x_{n}\Vert = 0. \)
Next, we show that \(\varOmega _w (x_n) \subset VI(C,A)\cap F(T)\), where \(\varOmega _w(x_n)\) is the weak subsequential limit of \(\{x_n\}\). Let \({\bar{x}} \in \varOmega _w(x_n)\), there exists a subsequence \(\{x_{n_k}\}\) of \(\{x_n\}\) such that \(x_{n_k} \rightharpoonup {\bar{x}}\) as \(k \rightarrow \infty \). Consequently from (22), \(v_{n_k} \rightharpoonup {\bar{x}}\). Since \(||v_{n_k} - Tv_{n_k}|| \rightarrow 0\), then \({\bar{x}} \in {\hat{F}}(T) = F(T)\). Furthermore, let \(z \in C\) be an arbitrary point and \(\{\varepsilon _k\}\) be a sequence of decreasing nonnegative numbers such that \(\varepsilon _k \rightarrow 0\) as \(k \rightarrow \infty \). Using Lemma 3.3(c), we can find a large enough \(N_k\) such that \(\langle Ax_{n_k}, z - x_{n_k} \rangle + \varepsilon _k \ge 0, \quad \forall k \ge N_k.\) This implies that
for some \(t_k \in E\) satisfying \(1 = \langle Ax_{n_k}, t_k \rangle \) (since \(Ax_{n_k} \ne 0\)). Since A is pseudo-monotone, then we have from (23) that \( \langle A(z+ \varepsilon _kt_k), z + \varepsilon _k t_k - x_{n_k} \rangle \ge 0, \quad \forall k \ge N_k.\) This implies that
Since \(\epsilon _{k} \rightarrow 0\) and A is continuous, then the right-hand side of (24) tends to zero. Thus, we obtain that \(\liminf \limits _{k \rightarrow \infty }\langle Az, z- x_{n_k} \rangle \ge 0, \quad \forall z \in C.\) In view of Lemma 3.3(c), we have that
We know from Lemma 2.2 of [40], p. 2090 and the above inequality that \({\bar{x}} \in VI(C,A).\)
Therefore \({\bar{x}} \in \varGamma : = VI(C,A)\cap F(T)\).
We now show that \(\{x_n\}\) converges strongly to \(x^* = Proj_\varGamma ^f u\). It is easy to show that
Now using Lemma 2.5 of [43], p. 243 with Lemma 3.4(i), we obtain that \(D_f(x^*,x_{n}) \rightarrow 0\) as \(n \rightarrow \infty \). Hence, \(\lim \limits _{n \rightarrow \infty }||x_{n} - x^*|| = 0. \) Therefore, \(\{x_{n}\}\) converges strongly to \(x^*= Proj_\varGamma ^f u\).
CASE B: Suppose \(\{D_f(p,x_n)\}\) is not monotonically decreasing. Let \(\phi : {\mathbb {N}} \rightarrow {\mathbb {N}}\) for all \(n \ge n_0\) (for some \(n_0\) large enough) be defined by \(\phi _{n} = \max \{k \in {\mathbb {N}}: \phi _k \le \phi _{k+1}\}.\) Clearly, \(\phi \) is nondecreasing, \(\phi (n) \rightarrow \infty \) as \(n \rightarrow \infty \) and
Following similar argument as in CASE A, we obtain
as \(n \rightarrow \infty \) and \(\varOmega _w(x_{\phi (n)}) \subset VI(C,A)\cap F(T),\) where \(\varOmega _w(x_{\phi (n)})\) is the weak subsequential limit of \(\{x_{\phi (n)}\}\). Also,
From Lemma 3.4(i), we have that \(D_f(p, x_{\phi (n)+1}) \le (1-\alpha _{\phi (n)})D_f(p, x_{\phi (n)}) + \alpha _{\phi (n)}\langle \nabla f(u) - \nabla f(p), x_{\phi (n)+1} - p \rangle .\) Since \(D_f(p, x_{\phi (n)}) \le D_f(p, x_{\phi (n)+1})\), then
Hence from (25), we obtain
As a consequence, we obtain that for all \(n \ge n_0\),
Hence \(\lim \limits _{n \rightarrow \infty }D_f(p, x_{n}) = 0\Rightarrow \lim \limits _{n \rightarrow \infty }||x_{n} - p|| = 0.\) This implies that \(\{x_n\}\) converges strongly to p. This completes the proof. \(\square \)
4 Application to Equilibrium Problems
Let E be a real reflexive Banach space and C be a nonempty, closed and convex subset of E. Let \(g:C \times C \rightarrow {\mathbb {R}}\) be a bifunction such that \(g(x,x) = 0\) for all \(x \in C\). The equilibrium problem (shortly, EP) with respect to g on C is stated as follows:
We denote the solution set of EP (26) by EP(C, g). The bifunction \(g: C \times C \rightarrow {\mathbb {R}}\) is said to be
-
(i)
monotone on C if \(g(x,y) + g(y,x) \le 0 \quad \forall ~~x,y \in C;\)
-
(ii)
pseudo-monotone on C if \(g(x,y) \ge 0 \Rightarrow g(y,x) \le 0 \quad \forall ~~x,y \in C.\)
Remark 4.1
[44] Every monotone bifunction on C is pseudo-monotone but the converse is not true. A mapping \(A: C \rightarrow E^{*}\) is pseudo-monotone if and only if the bifunction \(g(x,y) = \langle Ax, y-x \rangle \) is pseudo-monotone on C.
Several algorithms have been introduced for solving the EP (26) when the bifunction g is monotone (see, for instance, [45,46,47,48]). However, when g is pseudo-monotone, very few iterative methods are known for solving the EP.
Assume that the bifunction g satisfies the following:
Assumption 4.1
(A1) g is weakly continuous on \(C \times C\),
-
(A2)
\(g(x,\cdot )\) is convex lower semicontinuous and subdifferentiable on C for every fixed \(x \in C\),
-
(A3)
for each \(x,y,z \in C\), \(\limsup _{t \downarrow 0}g(tx + (1-t)y,z) \le g(y,z).\)
Lemma 4.1
[49] Let E be a nonempty convex subset of a Banach space E and \(f:E \rightarrow {\mathbb {R}}\) be a convex and subdifferentiable function, then f is minimal at \(x \in E\) if and only if
where \(N_C(x)\) is the normal cone of C at x, that is, \(N_C(x) := \{x^* \in E^* : \langle x^*, x - z \rangle \ge 0,~~\forall z \in C\}.\)
Lemma 4.2
[50] Let E be a real reflexive Banach space. If f and g are two convex functions such that there is a point \(x_0 \in \) dom \(f ~\cap \) dom g where f is continuous, then \(\partial (f+g)(x) = \partial f(x) + \partial g(x) \quad \forall x \in E.\)
Proposition 4.1
Let E be a real reflexive Banach space and C be a nonempty, closed and convex subset of E. Let \(g:C \times C \rightarrow {\mathbb {R}}\) be a bifunction such that \(g(x,x) = 0\) and \(f:E \rightarrow {\mathbb {R}}\) be a Legendre and totally coercive function. Then a point \(x^* \in EP(C,g)\) if and only if \(x^*\) solves the following minimization problem:
Proof
Let \(x^* = argmin_{y \in C}\bigg \{ \lambda g(x,y) +D_f(y,x)\bigg \},\) then from Lemmas 4.1 and 4.2, we have
Hence, there exist \(w \in \partial g(x,x^*)\) and \({\bar{w}} \in N_C(x^*)\) such that
Since \({\bar{w}} \in N_C(x^*)\), then \(\langle {\bar{w}},z -x^* \rangle \le 0\) for all \(z \in C\). This together with (27) implies that
and hence
Also, since \(w \in \partial g(x,x^*)\), then we have \(g(x,z) - g(x,x^*) \ge \langle w, z -x^* \rangle \quad \forall ~~z \in C.\) This together with (28) yields
Replacing x with \(x^*\) in (29), we have \(g(x^*,z) \ge 0, \quad \forall z \in C.\) Therefore, \(x^* \in EP(C,g).\) The converse follows clearly. \(\square \)
It is easy to show that, if \(x \in VI(C,A),\) then x is the unique solution of the minimization problem
where \(u \in C\) and \(\lambda >0\). By setting \(\langle Ax, y-x \rangle = g(x,y)\) in Theorem 3.1, we have the following result for approximating solution of pseudo-monotone equilibrium problem.
Theorem 4.1
Let E be a real reflexive Banach space, and let C be a nonempty, closed and convex subset of E. Let \(f: E \rightarrow {\mathbb {R}}\) be a coercive, Legendre function which is bounded, uniformly Fréchet differentiable and totally convex on bounded subsets of E such that \(C \subset int(domf)\). Let \(g: C \times C \rightarrow {\mathbb {R}}\) be a pseudo-monotone bifunction such that \(g(x,x) =0\) for all \(x \in C\) and satisfying Assumption 4.1. Let \(T:C \rightarrow C\) be a Bregman quasi-nonexpansive mapping with \({\hat{F}}(T)= F(T)\) such that \(\varGamma := EP(C,g) \cap F(T) \ne \emptyset \). Let \(\{\alpha _n\}\) and \(\{\beta _n\}\) be nonnegative sequences in ]0, 1[ and such that conditions (C1) and (C2) are satisfied. Let \(\{x_n\}\) be generated by the following algorithm:

Then, the sequence \(\{x_n\}\) converges strongly to a point \({\bar{x}} = Proj_\varGamma ^f(u)\), where \(Proj_\varGamma ^f\) is the Bregman projection from C onto \(\varGamma \).
5 Numerical Examples
In this section, we present two numerical examples which demonstrate the performance of our Algorithm 3.1.
Example 5.1
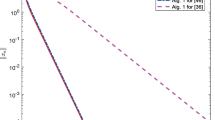
Let \(E = {\mathbb {R}}^n\) with standard topology and \(T: {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) be defined by \(Tx = -\frac{1}{2}x.\) Consider an operator \(A: {\mathbb {R}}^m \rightarrow {\mathbb {R}}^m\) (\(m = 20, 50,100,200\)) define by \(Ax = Mx+q\) where \(M =NN^{T} + S+D,\)N is a \(m\times m\) matrix, S is an \(m \times m\) skew-symmetric matrix, D is a \(m \times m\) diagonal matrix, whose diagonal entries are non-negative so that M is positive definite and q is a vector in \({\mathbb {R}}^m\). The feasible set \(C\subset {\mathbb {R}}^m\) is closed and convex (polyhedron), which is defined as \(C = \{x = (x_1,x_2,\dots , x_m) \in {\mathbb {R}}^m: Qx \le b\}\), where Q is a \(l \times m\) matrix and b is a non-negative vector. Clearly, A is monotone (hence, pseudo-monotone) and L-Lipschitz continuous with \(L = ||M||\). For experimental purpose, all the entries of N, S, D and b are generated randomly as well as the starting point \(x_1 \in [0,1]^m\) and q is equal to the zero vector. In this case, the solution to the corresponding variational inequality is \(\{0\}\) and thus, \(\varGamma : = VI(C,A) \cap F(T) =\{0\}\). We fix the stopping criterion as \(\frac{\Vert x_{n+1}-x_{n}\Vert ^2}{\Vert x_2 - x_1\Vert ^2}=\epsilon <10^{-5}\), \(\sigma = 0.7\), \(\gamma = 0.9\), \(s = 10\), \(\lambda _n = 0.15\) and let \(\alpha _n = \frac{1}{n+1}\) and \(\beta _n = \frac{1}{4}\). The projection onto the feasible set C is carry-out by using the MATLAB solver ‘fmincon’ and the projection onto an hyperplane \(Q = \{x \in {\mathbb {R}}^m: \langle a,x\rangle = 0\}\) is defined by \(P_Q(x) = x -\frac{\langle a,x \rangle }{||a||^2}a.\) Since A is monotone, we compare the output of our Algorithm 3.1 with Algorithm 3.3 of [20] (Alg 1.5). The numerical result is reported in Fig. 1 and Table 1. We see that our Algorithm 3.1 converges faster than Algorithm 3.3 of [20]. This is expected because the stepsize rule in STEP 2 of our algorithm tends to determine a larger stepsize closer to the solution of the problem (Tables 2, 3).

Example 5.1, \(m =20\); \(m =50\); \(m=100\) and \(m=200\) respectively
Finally, we give a concrete example in \(\ell _p\) space (\(1 \le p < \infty \) with \(p \ne 2\)), which is not a Hilbert space. It is well known that the dual space \((\ell _p)^*\) is isomorphic to \(\ell _q\) provided that \(\frac{1}{q}+\frac{1}{p} =1\) (see, for instance, [51], Lemma 2.2, p. 11). Also, the \(\ell _p\) space is a reflexive Banach space and in this case, we take \(f(x) = \frac{1}{p}||x||^p.\)
Example 5.2
Let \(E = \ell _3({\mathbb {R}})\) define by \(\ell _3({\mathbb {R}}):= \{{\bar{x}}= (x_1,x_2,x_3,\dots ), x_i \in {\mathbb {R}}: \sum _{i=1}^\infty |x_i|^3 < \infty \},\) with norm \(||\cdot ||_{\ell _3}:\ell _3 \rightarrow [0,\infty )\) defined by \(||{\bar{x}}||_{\ell _3} = \left( \sum _{i=1}^\infty |x_i|^3\right) ^\frac{1}{3},\) for arbitrary \({\bar{x}} = (x_1,x_2,x_3,\dots )\) in \(\ell _3.\) Let \(C:=\{x\in E:||x||_{\ell _3}\le 1\}\) and define the mapping \(A:C \rightarrow (\ell _3)^*\) by \(Ax = 2x + (1,1,1,0,0,0,\dots ),\) with \((x_1,x_2,x_3,\dots ) \in \ell _3({\mathbb {R}}).\) It is easy to show that A is monotone (hence, pseudo monotone). Take \(Tx = \frac{x}{2},\)\(\alpha _n = \frac{1}{100n+1}, \beta _n = \frac{3n+5}{7n+8}, \sigma = 0.14,\gamma = 0.4, s = 3, \lambda = 0.78.\) The projections onto the feasibility set are carried out using optimization tool box in MATLAB. We carried out two numerical tests for approximating the common solution of the VI and FPP using Algorithm 3.1. The initial value of \(x_1\) and fixed u used are
-
Case I:
\(x_1 = (0.3241,0.5387,-0.1256,0,0,0,\dots )\) and \(u = (-0.0988,0.2679,0.2890,0,0,0,\dots )\)
-
Case II:
\(x_1 = (-4.5289,-1.2345,5.2238,0,0,0\dots )\) and \(u = (1.3268,-5.3420,3.2890,0,0,0,\dots ),\) with stopping criterion \(\frac{||x_{n+1}-x_{n}||_{\ell _3}}{||x_2 -x_1||_{\ell _3}} < 10^{-7}\) in each case. The following are the computational results obtain for these tests.
Remark 5.1
The numerical experiments showed that the performance of the algorithm is essentially independent of the value of \(x_1\) used in the computation.
6 Conclusions
In this paper, we have proposed a strong convergence projection-type algorithm for solving pseudo-monotone VI and fixed point of Bregman quasi-nonexpansive mapping in a real reflexive Banach space. A convergence theorem was established without a Lipschitz condition imposed on the cost operator of the VI. We also give an application of our results to approximating the solution of pseudo-monotone equilibrium problems in reflexive Banach spaces. Some numerical examples are also provided to demonstrate the behavior of our algorithm. The following are the contributions made in this paper:
-
(i)
The main result in this paper extends the result of Denisov et al [52] and Kanzow and Shehu [20] from Hilbert space to a reflexive Banach space and also from monotone variational inequality to pseudo-monotone variational inequalities.
-
(ii)
The operator involved in our method need not be Lipschitz continuous. Our main result extends many recent results (e.g., [16, 24, 25]) on VI, where the underlying operator is monotone and Lipschitz continuous.
-
(iii)
The (w, s) sequential continuity of a pseudo-monotone operator A, assumed by Ceng et al. [53] and Yao and Postolache [54] to establish weak and strong convergence results for solving VI in a Hilbert space, was relaxed in our result and also the strong convergence result obtained in this paper improves the weak convergence result of Vuong [55] in a real Hilbert space.
References
Fichera, G.: Sul problema elastostatico di Signorini con ambigue condizioni al contorno. Atti Accad. Naz. Lincei, VIII. Ser., Rend., Cl. Sci. Fis. Mat. Nat. 34, 138–142 (1963)
Stampacchia, G.: Formes bilineaires coercitives sur les ensembles convexes. C. R. Acad. Sci. Paris 258, 4413–4416 (1964)
Hartman, P., Stampacchia, G.: On some non linear elliptic differential–functional equations. Acta Math. 115, 271–310 (1966)
Lions, J.L., Stampacchia, G.: Variational inequalities. Commun. Pure Appl. Math. 20, 493–519 (1967)
Kinderlehrer, D., Stampacchia, G.: An Introduction to Variational Inequalities and Their Applications. Academic Press, New York (1980)
Jolaoso, L.O., Taiwo, A., Alakoya, T.O., Mewomo, O.T.: A unified algorithm for solving variational inequality and fixed point problems with application to the split equality problem. Comput. Appl. Math. (2019). https://doi.org/10.1007/s40314-019-1014-2
Gibali, A., Reich, S., Zalas, R.: Iterative methods for solving variational inequalities in Euclidean space. J. Fixed Point Theory Appl. 17, 775–811 (2015)
Taiwo, A., Jolaoso, L.O., Mewomo, O.T.: A modified Halpern algorithm for approximating a common solution of split equality convex minimization problem and fixed point problem in uniformly convex Banach spaces, Comput. Appl. Math. 38(2), Article 77 (2019)
Korpelevich, G.M.: The extragradient method for finding saddle points and other problems. Ekon. Mat. Metody. 12, 747–756 (1976). (In Russian)
Antipin, A.S.: On a method for convex programs using a symmetrical modification of the Lagrange function. Ekonomika i Mat. Metody. 12, 1164–1173 (1976)
Censor, Y., Gibali, A., Reich, S.: Extensions of Korpelevich’s extragradient method for variational inequality problems in Euclidean space. Optimization 61, 1119–1132 (2012)
Censor, Y., Gibali, A., Reich, S.: The subgradient extragradient method for solving variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 148, 318–335 (2011)
Halpern, B.: Fixed points of nonexpanding maps. Proc. Am. Math. Soc. 73, 957–961 (1967)
Reich, S.: Strong convergence theorems for resolvents of accretive operators in Banach spaces. J. Math. Anal. Appl. 75, 287–292 (1980)
Censor, Y., Gibali, A., Reich, S.: Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 26, 827–845 (2011)
Kraikaew, R., Saejung, S.: Strong convergence of the Halpern subgradient extragradient method for solving variational inequalities in Hilbert spaces. J. Optim. Theory Appl. 163, 399–412 (2014)
Jolaoso, L.O., Taiwo, A., Alakoya, T.O., Mewomo, O.T.: A self adaptive inertial subgradient extragradient algorithm for variational inequality and common fixed point of multivalued mappings in Hilbert spaces. Demonstr. Math. 52, 183–203 (2019)
Iusem, A.N., Svaiter, B.F.: A variant of Korpelevich’s method for variational inequalities with a new search strategy. Optimization 42, 309–321 (1997)
Bello Cruz, J.Y., Iusem, A.N.: A strongly convergent direct method for monotone variational inequalities in Hilbert spaces. Numer. Funct. Anal. Optim. 30, 23–36 (2009)
Kanzow, C., Shehu, Y.: Strong convergence of a double projection-type method for monotone variational inequalities in Hilbert spaces. J. Fixed Point Theory Appl. (2018). https://doi.org/10.1007/s11784-018-0531-8
Gibali, A.: A new Bregman projection method for solving variational inequalities in Hilbert spaces. Pure Appl. Funct. Anal. 3(3), 403–415 (2018)
Censor, Y., Gibali, A., Reich, S.: Algorithms for the split variational inequality problem. Numer. Algorithms 59, 301–323 (2012)
Kassay, G., Reich, S., Sabach, S.: Iterative methods for solving system of variational inequalities in reflexive Banach spaces. SIAM J. Optim. 21(4), 1319–1344 (2011)
Cai, G., Gibali, A., Iyiola, O.S., Shehu, Y.: A new double-projection method for solving variational inequalities in Banach space. J. Optim. Theory Appl. 178(1), 219–239 (2018)
Chidume, C.E., Nnakwe, M.O.: Convergence theorems of subgradient extragradient algorithm for solving variational inequalities and a convex feasibility problem. Fixed Theory Appl. 2018, 16 (2018)
Iiduka, H.: A new iterative algorithm for the variational inequality problem over the fixed point set of a firmly nonexpansive mapping. Optimization 59, 873–885 (2010)
Iiduka, H., Yamada, I.: A use of conjugate gradient direction for the convex optimization problem over the fixed point set of a nonexpansive mapping. SIAM J. Optim. 19, 1881–1893 (2009)
Iiduka, H., Yamada, I.: A subgradient-type method for the equilibrium problem over the fixed point set and its applications. Optimization 58, 251–261 (2009)
Bauschke, H.H., Borwein, J.M., Combettes, P.L.: Essential smoothness, essential strict convexity and Legendre functions in Banach space. Commun. Contemp. Math. 3, 615–647 (2001)
Karamardian, S., Schaible, S.: Seven kinds of monotone maps. J. Optim. Theory Appl. 66, 37–46 (1990)
Reem, D., Reich, S., De Pierro, A.: Re-examination of Bregman functions and new properties of their divergences. Optimization 68, 279–348 (2019)
Taiwo, A., Jolaoso, L.O., Mewomo, O.T.: Parallel hybrid algorithm for solving pseudomonotone equilibrium and split common fixed point problems. Bull. Malays. Math. Sci. Soc. (2019). https://doi.org/10.1007/s40840-019-00781-1
Borwein, J.M., Reich, S., Sabach, S.: A characterization of Bregman firmly nonexpansive operators using a new monotonicity concept. J. Nonlinear Convex Anal. 12, 161–184 (2011)
Butnariu, D., Iusem, A.N.: Totally Convex Functions for Fixed Points Computational and Infinite Dimensional Optimization. Kluwer, Dordrecht (2000)
Butnariu, D., Reich, S., Zaslavski, A.J.: There are many totally convex functions. J. Convex Anal. 13, 623–632 (2006)
Butnariu, D., Resmerita, E.: Bregman distances, totally convex functions and a method for solving operator equations in Banach spaces. Abstr. Appl. Anal., Article ID: 84919. 1-39 (2006)
Reich, S., Sabach, S.: Two strong convergence theorem for a proximal method in reflexive Banach spaces. Numer. Funct. Anal. Optim. 31(13), 22–44 (2010)
Reich, S., Sabach, S.: A strong convergence theorem for proximal type- algorithm in reflexive Banach spaces. J. Nonlinear Convex Anal. 10, 471–485 (2009)
Reich, S.: A weak convergence theorem for the alternating method with Bregman distances. In: Theory and Applications of Nonlinear Operators. Marce Dekker, New York, pp. 313–318 (1996)
Mashreghi, J., Nasri, M.: Forcing strong convergence of Korpelevich’s method in Banach spaces with its applications in game theory. Nonlinear Anal. 72, 2086–2099 (2010)
Lin, L.J., Yang, M.F., Ansari, Q.H., Kassay, G.: Existence results for Stampacchia and Minty type implicit variational inequalities with multivalued maps. Nonlinear Anal. Theory Methods Appl. 61, 1–19 (2005)
Iusem, A.N., Nasri, M.: Korpelevich’s method for variational inequality problems in Banach spaces. J. Glob. Optim. 50, 50–76 (2011)
Xu, H.K.: Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 66, 240–256 (2002)
Yao, J.C.: Variational inequalities with generalized monotone operators. Math. Oper. Res. 19, 691–705 (1994)
Jolaoso, L.O., Oyewole, K.O., Okeke, C.C., Mewomo, O.T.: A unified algorithm for solving split generalized mixed equilibrium problem and fixed point of nonspreading mapping in Hilbert space. Demonstr. Math. 51, 211–232 (2018)
Jolaoso, L.O., Alakoya, T.O., Taiwo, A., Mewomo, O.T.: A parallel combination extragradient method with Armijo line searching for finding common solution of finite families of equilibrium and fixed point problems. Rend. Circ. Mat. Palermo (2019). https://doi.org/10.1007/s12215-019-00431-2
Izuchukwu, C., Aremu, K.O., Mebawondu, A.A., Mewomo, O.T.: A viscosity iterative technique for equilibrium and fixed point problems in a Hadamard space. Appl. Gen. Topol. 20(1), 193–210 (2019)
Reich, S., Sabach, S.: Three strong convergence theorems regarding iterative methods for solving equilibrium problems in reflexive Banach spaces. Contemp. Math. 568, 225–240 (2012)
Aubin, J.P.: Optima and Equilibria. Springer, New York (1998)
Cioranescu, I.: Geometry of Banach Spaces, Duality Mappings and Nonlinear Problems. Kluwer, Dordrecht (1990)
Bowers, A., Kalton, N.J.: An Introductory Course in Functional Analysis. Springer, New York (2014)
Denisov, S.V., Semenov, V.V., Chabak, L.M.: Convergence of the modified extragradient method for variational inequalities with non-Lipschitz operators. Cybern. Syst. Anal. 51, 757–765 (2015)
Ceng, L.C., Teboulle, M., Yao, J.C.: Weak convergence of an iterative method for pseudomonotone variational inequalities and fixed-point problems. J. Optim. Theory Appl. 146, 19–31 (2010)
Yao, Y., Postolache, M.: Iterative methods for pseudomonotone variational inequalities and fixed-point problems. J. Optim. Theory Appl. 155, 273–287 (2012)
Vuong, P.T.: On the weak convergence of the extragradient method for solving pseudo-monotone variational inequalities. J. Optim. Theory Appl. 176, 399–409 (2018)
Acknowledgements
The authors sincerely thank the Editor in Chief and the anonymous reviewers for their careful reading, constructive comments and fruitful suggestions that substantially improved the manuscript. The first author acknowledges with thanks the bursary and financial support from Department of Science and Technology and National Research Foundation, Republic of South Africa Center of Excellence in Mathematical and Statistical Sciences (DST-NRF COE-MaSS) (BA2019-039) Doctoral Bursary. The second author acknowledges with thanks the International Mathematical Union Breakout Graduate Fellowship (IMU-BGF-20191101) Award for his doctoral study. The fourth author is supported by the National Research Foundation (NRF) of South Africa Incentive Funding for Rated Researchers (Grant Number 119903). Opinions expressed and conclusions arrived are those of the authors and are not necessarily to be attributed to the CoE-MaSS, NRF and IMU.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Antonino Maugeri.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jolaoso, L.O., Taiwo, A., Alakoya, T.O. et al. A Strong Convergence Theorem for Solving Pseudo-monotone Variational Inequalities Using Projection Methods. J Optim Theory Appl 185, 744–766 (2020). https://doi.org/10.1007/s10957-020-01672-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-020-01672-3
Keywords
- Variational inequality
- Extragradient method
- Fixed point problem
- Projection method
- Iterative method
- Banach space