
Abstract
A theoretical model is developed to stimulate electrokinetic transfer through peristaltic movement in a microchannel. The effect of variable viscosity, variable thermal conductivity, and wall properties is carried out. Such flows emerge in bio-mimetic pumping systems at the extremely tiny scale of significance in physiological operation, e.g., eye medication shipment systems. The sinusoidal wave-like motion propagates along the channel wall leading to the peristaltic motion. The long-wavelength and petite Reynolds number estimations are supposed to abbreviate the governing formulas. Debye–Hückel linearization is also analyzed. The variable thermal conductivity and variable viscosity parameters are used as perturbation parameters. The graphical outcomes are presented for temperature, velocity, concentration, and streamlines. Biomedical engineers can use the obtained results to create bio-microfluidic mechanisms that may assist in carrying physical liquids.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Peristalsis is a vital liquid physiological transportation mechanism in living organs. It is caused by the continuous contraction and relaxation of the vessel walls. The intestinal network, lymphatic vessels, glandular ducts, and blood vessels are all said to have peristaltic pumping as a built-in property in some cases. Peristalsis-based explorations in the industry include finger and roller pumps, the transportation of sanitary, and several corroding materials. It is used in MRIs, endoscopes, heart–lung devices, catheters, and various other bioscience applications. After Latham [1] introduced his work on peristaltic flow, scientists and researchers have used experimental, numerical, and analytical techniques to add to the literature under various assumptions and boundary conditions. In this regard, some appropriate studies have been reported in [2,3,4,5,6,7,8,9,10]. Peristaltic motion through a permeable medium has also gained attention due to its vast industrial and biomedical applications [11,12,13,14].
The failure of water and natural oil to fulfill the needs of thermal conductivity has created space for nanofluid research since the nanofluids enhance the thermal conductivity of conventional flow. They provide the various purposes of biomedical engineering such as drug delivery and tumor treatment and hence have become a topic of research interest [15,16,17,18,19,20,21,22,23,24,25,26].
Many industrial equipment’s (control generators, heat exchange structures, MHD blowers, etc.) are based on the principle of MHD. It is also effective in drug delivery, control of blood flow during surgery, cell separation magnetic gadgets, etc. These and many more applications have promoted the study of MHD analysis in peristaltic flow [27,28,29,30,31,32,33,34,35,36,37]. Several articles can be found regarding the study of radiation and the MHD effect on the flow through stretching sheets [38,39,40,41,42,43,44,45,46,47]. Instead of using convective derivatives, the Jeffrey model proposes a linear simple model that uses the time derivatives and can also be reduced to a Newtonian fluid model easily. This behavior of Jeffrey fluid exhibiting both Newtonian and non-Newtonian characteristics has attracted many researchers. The usual viscous fluid models fail to describe the stress relaxation property of non-Newtonian fluids but is well explained by the Jeffrey fluid model. The linear viscoelastic effect of Jeffrey fluid has many examples that include the dilute polymer solution thus finding numerous applications in the polymer industry. The numerous applications of Jeffry fluid have created interest in many researchers [48,49,50,51,52].
One of the biggest challenges in designing microfluidic transportation systems in many of the above appliances is to make sure that the flow of liquid can be limited to the maximum amount possible. Since it does not require the typical relocating constituents attributed to usual micro-pumps, it has significant advantages in microfluidic pumping. It consents an efficient policy of microchannel motion parts using electrical fields. Electro-osmotic pumping has been discovered by affecting an electrical field to an electrolyte in contact via the surface to generate a continuous pulse-free motion. The viscous drag causes the liquid to flow tangentially toward the area, resulting in a reliable net ion migration. The strict requirement for easy-to-handle, tiny, and economical analytic mechanisms has resulted from the demand for quickly, reliable, and reputable microfluidic systems. DNA analysis/sequencing systems, chemical/biological agent discovery sensors, and drug delivery on integrated circuits are examples of such applications. In few of the above applications, one of the major challenges in the design of microfluidic transport systems is to reduce the cost of liquid movement to the lowest possible level by arranging for perfect mixes of flow activating systems. However, electro-osmosis has proven to be a simple system for creating plug-shaped like speed profiles in microchannels by controlling the statement of a pertained electrical field with free density gradients near the solid–liquid user interface. Because it does not require the typical relocating parts found in usual micro-pumps, it has significant advantages in microfluidic pumping. It allows for very reliable microchannel flow areas through electric fields. Electro-osmotic pumping has been thought to generate a continuous flow with no pulses. At the microscale, these pumps are a lot more malleable. They are widely used in pharmaceutical division, electro-osmotically activated bio-microfluidic mechanisms plasma, and splitting. Flow control is accomplished via implementing an electric field to an electrolyte in contact through a surface. The electrolyte connects the area, resulting in a web indict thickness in the remedy. The viscous drag causes the liquid to flow tangentially to the surface, resulting in a continuous ions web. Driven through the request of electro-osmotic transfer toward the peristaltic mechanism, Chakraborty [53] proposed the peristaltic circulation with electric field. Nonetheless, a slim electrical double layer (EDL) estimation was carried. Bandopadhyay et al. [54] modified another model to review the stress circulation, channel size, and impacts of the electric field and EDL thickness. Guo and Qi [55] researched the fractional Jeffreys design of electro-osmotic peristaltic flow in a limitless microchannel to evaluate the results of electro-osmosis and fractional parameters on peristaltic circulation of fractional viscoelastic liquid. Waheed et al. [56] examined the mass and heat transport effect for EOF of a third-order drink through viscous dissipation in a microchannel. Waheed et al. [57] scrutinized the electro-osmotic modulated peristaltic flow of third-grade liquid through slip conditions. Nooren et al. [58] examined the heat qualities of an electro-osmotic phenomenon in biofluid via a peristaltic wavy microchannel. Many theoretical as well as computational researches on electro-osmotic flow with and also without heat transport have been presented [59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76].
Numerous studies conducted by considering animal physiology found that the biological liquids show variation in viscosity. The consideration is evident because the average animal or human of comparable dimensions consumes as much as two liters of water, causing a modification in the focus of physical fluids over time. Thus, considering the variation in viscosity is an essential factor while examining the peristaltic system. Ali et al. [77] inspected the effect of slip conditions over the peristaltic system and found that the pumping region diminishes for larger values of slip parameter. Nadeem et al. [78] emphasize the heat transport qualities for a third-order non-Newtonian liquid taking 2 designs of variable thickness right into account, particularly variation via temperature level and a variant through the channel's size. The nature of the walls under examination likewise plays an essential duty in the peristaltic system, and therefore, several research studies have been performed for various wall surface arrangements. In addition, the temperature variation has been revealed to transform the residential properties of the physical liquid under monitoring. Therefore, variable thermal conductivity is likewise a crucial factor to consider for the research of peristalsis for physical liquid circulations. To this end, numerous analyses have been carried out for various setups of channel wall surfaces. Temperature-dependent thermal conductivity was thought about by Hayat et al. [79] by taking Jeffrey liquid over a non-linear stretching area through variable heat change. Vaidya et al. [80] scrutinized the impact of both changeable viscosity and changeable thermal conductivity by taking Rabinowitsch liquid in a channel. Further, Manjunatha et al. [81] examined the impacts of slip conditions over the peristaltic flow of Jeffrey liquid under the consideration of different liquid properties. The studies accounting for these properties have assisted in a better understanding of non-Newtonian fluids. Some vital researches regarding the employ of the non-Newtonian fluids in modeling and evaluation of peristaltic circulation with variable fluid properties can be found in [82,83,84,85,86,87,88,89].
The current study is the first of its kind in modeling the electrokinetically modulated peristaltic circulation of Jeffrey liquid through variable fluid properties. In addition, the effects of heat and mass transport and wall properties are considered. The governing equations are simplified through utilizing trusted estimation, namely lubrication, as well as Debye–Hückel estimate. After that, the perturbation strategy solves the resulting equation, and outcomes are contrasted numerically utilizing the MATLAB software program. The impact of relevant terms on velocity, streamlines, concentrations, and temperature is discussed graphically.
2 Mathematical formulation
2.1 Flow analysis
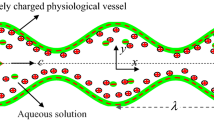
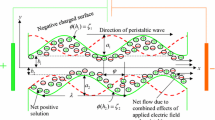
Consider a 2-D electrokinetic adjusted flow of Jeffrey fluid through a uniform microfluidic conduit of \(2\overline{a }\) width. The propagation of sinusoidal wave shapes this flow at a continuous velocity \(c\) beside the complaint conduit walls (See Fig. 1). Let \(\overline{Y }=\pm \overline{h }(\overline{X },\overline{t }\)) be the transverse displacements of the lower and upper walls, respectively. Here, propagation of wave is along the \(x-axis\). The mass and heat transport inspection is maintained with giving \({T}_{0}, {C}_{0}\) and \({T}_{1},{C}_{1}\) to the superior conduit wall and the inferior conduit wall, respectively. The electric field \(E\) is axially to the fluid movement.

Geometry of the electro-osmotic modulated peristaltic flow
The microchannel wall equation: [55]
2.2 Mathematical formulations
The governing equation as given by [55] is.
Continuity equation:
Equation of momentum:
Energy equation with viscous dissipation [56]
Concentration equation:
The constitutive equation for Jeffrey fluid is: [3]
where \(\overline{\tau }\) is the Cauchy stress tensor, \(\overline{p}\) is the pressure, \({\lambda }_{2}\) is the retardation time, \({\lambda }_{1}\) is the ratio of relaxation to retardation times,\(\overline{S}\) is the extra stress tensor, \(\overline{I}\) is the identity tensor,\(\dot{\gamma }\) is the shear rate, and dots over the quantities specify differentiation through revere to time.
2.3 Electrohydrodynamics
In a microchannel, the Poisson equation is written [52] as:
here \(\overline{\phi }\) denotes the electric potential, \(\xi \mathrm{ is the dielectric permittivity},\) and \({\rho }_{e}\) represents the total charge density.
The net charge density \({\rho }_{e}\) follows the Boltzmann variation [59], which is
The anions \(\left({\overline{n}}^{-}\right)\) and captions \(\left({\overline{n}}^{+}\right)\) are distinct by \({\rho }_{e}\) of the Boltzmann equation:
\({n}_{0}\) denotes bulk concentration, \({K}_{B}\) is the Boltzmann constant, \({z}_{v}\) is the charge balance, \(e\) is the electronic charge, and \({T}_{av}\) is the average temperature.
Employing Debye–Hückel linearization estimation [59] Eq. (8) revolves into
where \({m}_{e}\) represents the electro-osmotic expression. The analytical solution of Eq. (11) with boundary conditions (BCs) \(\frac{{\partial \phi }}{{\partial y}} = 0,{\text{at}}\;y = 0\;{\text{and}}\;\phi = 1,{\text{at}}\;y = h\left( x \right)\) is reached as:
2.4 Nondimensionalization
The switch from laboratory frame \(\left(\overline{X },\overline{Y }\right)\) to wave frame of references \(\left(\overline{x},\overline{y}\right)\) is:
The above conversions are employed in Eqs. (2)–(6) and then introducing the non-dimensional variables:
where \({U}_{hs}\) represents the Helmholtz–Smoluchowski speed, \(Sc\) is the Schmidt number, \({\uplambda }_{D}\) denotes the Debye length, \(\Omega\) is the concentration, \(y\) is the non-dimensional transverse coordinate, \({m}_{e}\) represents the electro-osmotic term, \(p\) is dimensionless pressure, \({\alpha }_{1}\) is peristaltic wave number, \({P}_{r}\) is the Prandtl number, \(\theta\) denotes the temperature, \(\psi\) is a non-dimensional stream function, \(S\) is the non-dimensional shear stress, \({R}_{e}\) is the Reynolds number, \(\upepsilon\) is the amplitude ratio, \(Br\) is the Brinkman number, \(Sr\) is the non-dimensional Soret number, \(x\) is the non-dimensional axial coordinate, and \({E}_{c}\) is the Eckert number.
2.5 Wall properties
The governing equation of the flexible wall movement is [5]:
\(R\) denotes an operator, which is employed to symbolize the motion of stretched membrane via viscous damping forces such that:
Continuity of stress at \(y=h\) and employing \(x\)-momentum equation yield
\(\tau\) is the elastic tension in the membrane, \(h\) is the dimensional slip expression, \({n}_{1}\) denotes the mass per unit surface, \({n}_{2}\) is the coefficient of viscous damping forces, and \({p}_{0}\) is the pressure over the exterior surface of the wall due to the tension in the muscles. We assumed \({p}_{0}=0\).
The relation of the stream function \(\psi\) and the velocity is described as:
From Eqs. (3–6), subject to long-wavelength supposition and ignoring higher powers of \({\alpha }_{1}\), we arrive at:
The non-dimensional boundary conditions are:
The expression for variable viscosity is:
The thermal conductivity term:
here \(\alpha\) denotes the viscosity coefficient, and \(\beta\) is the thermal conductivity coefficient.
3 Perturbation solution
Equations (19)–(22) stipulate a governing differential scheme through BCs (23) and (24) that are exceptionally non-linear. It is not possible to get an exact solution to this scheme of equations. Consequently, the scheme is solved analytically employing the perturbation technique, which utilizes \(\alpha\) and \(\beta\) terms.
Hence, \(\psi\) and \(\theta\) are developed as:
3.1 Zeroth order system
Subject to these BCs
3.2 First-order system
Subject to these BCs
The resolution of zeroth and first-order schemes along via BCs is achieved employing the MATLAB 2019b programming. The segregate code has been written to achieve the solutions for temperature, streamline, and velocity. Then, the solution for Eq. (22) is achieved by double integrating the temperature expression via the BCs (23) and (24).
4 Results and discussion
This part emphasizes on the impact of Helmholtz–Smoluchowski/maximum electro-osmotic velocity \(\left({U}_{hs}\right)\), electro-osmotic parameter \(\left({m}_{e}\right)\), Jeffrey parameter \(\left({\lambda }_{1}\right)\), variable viscosity \(\left(\alpha \right)\), amplitude ratio \(\left(\epsilon \right)\), elasticity parameter \(\left({E}_{1}\right)\), mass parameter \(\left({E}_{2}\right)\), viscous damping force parameter \(\left({E}_{3}\right)\), variable thermal conductivity \(\left(\beta \right)\), Brinkmann number \(\left(Br\right)\), Schmidt number \(\left(Sc\right)\) and Soret number \(\left(Sr\right)\) over stream line \(\left(\psi \right),\) velocity \(\left(u\right)\), temperature \(\left(\theta \right)\) and concentration \(\left(\Omega \right)\). The outcomes are shown in Figs. 2–10.

\(u\left(y\right)\) for fluctuating (a) \({U}_{hs}\), (b) \({m}_{e}\), (c) \({\lambda }_{1}\), (d) \(\alpha\), (e) \(\epsilon\), (f) \({E}_{1}-{E}_{3}\)

\(\theta \left(y\right)\) for fluctuating (a) \({U}_{hs}\), (b) \({m}_{e}\), (c) \({\lambda }_{1}\), (d) \(\beta\), (e) \(\alpha\), (f) \(Br\), (g) \(\epsilon\), and (h) \({E}_{1}-{E}_{3}\)

\(\Omega \left(y\right)\) for fluctuating (a) \({U}_{hs}\), (b) \({m}_{e}\), (c) \({\lambda }_{1}\), (d) \(\beta\), (e) \(\alpha\), (f) \(Br\), (g) \(\epsilon\), and (h) \({E}_{1}-{E}_{3}\)

\(\Omega \left(y\right)\) for varying (a) \(Sc\) and (b) \(Sr\)

\(\psi \left(x,y\right)\) for varying (a) \({U}_{hs}=-1\), (b) \({U}_{hs}=0\), (c) \({U}_{hs}=1\), and (d) \({U}_{hs}=2\)

\(\psi \left(x,y\right)\) for varying (a) \({m}_{e}=1\) and (b) \({m}_{e}=3\)

\(\psi \left(x,y\right)\) for fluctuating (a) \({\lambda }_{1}=0\) and (b) \({\lambda }_{1}=2\)

\(\psi \left(x,y\right)\) for varying (a) \(\alpha =0\) and (b) \(\alpha =0.02\)

\(\psi \left(x,y\right)\) for varying (a) \({{E}_{2}=0.05,{E}_{3}=0.05,E}_{1}=0.03,\) (b) \({{E}_{3}=0.05, {E}_{2}=0.05, E}_{1}=0.05,\)(c) \({E}_{1}=0.05,{{E}_{2}=0.07,E}_{3}=0.05\), (d) \({E}_{2}=0.07,{{E}_{3}=0.07, E}_{1}=0.05\)
Figure 2 illustrates the impact of relevant parameters over speed. The velocity profiles have a parabolic form because to an optimum speed in the channel's center. Figure 2a explains that as \({U}_{hs}\), or the optimal electro-osmotic velocity (or Helmholtz–Smoluchowski speed), rises from −1 to 4, the axial motion has considerable momentum. For higher \({U}_{hs}\), a succeeding improvement in an axial electric field involves a considerable deceleration. The motion is maintained and delayed with an important electrical field strength. Tripathi et al. [65] investigated a similar trend. Other critical values of \({m}_{e}\) in Fig. 2b initially reduce the velocity profiles. In addition, there is a minor difference in velocity profiles for larger values. The joint of λD is the Debye–Hückel design. Since raised ion migration occurs as we budge away from the accused surface, reducing λD, i.e., augmenting Debye–Hückel parameter, is thought to rise electrical capacity. Consequently, λD is a vital manner criterion in controlling potential electrical distinction, which influences the axial speed field. Figure 2c is drawn for several values of λ1. The velocity profile progresses as the λ1 augments, as exposed here. With taking \({\lambda }_{1}=0\), the finding reduces to Newtonian fluid. Figure 2d describes the impact of α on velocity distributions. The velocity profile improves for more considerable values of α. Since a boost in α terms reduces the liquid's viscosity and therefore enhances the liquid movement. Figure 2e exposes a rise in the velocity profiles for more considerable values of amplitude ratio. Amplitude ratio is the relation between wave amplitude to channel width. Hence, a boost in amplitude ratio significantly improves the velocity profiles. The impact of flexibility, mass parameter, and viscous damping force term is exposed in Fig. 2f. With an improvement in the flexibility parameter, the fluid viscosity weakens since the particle moves at higher speeds. As the mass per unit area, the liquid travel particles freely develop the speed uplift. Since damping operates to resist the circulation speed because of energy loss, a minimizing response is apprehended. Clinically, once blood walls are supple or the mass per unit area augments (as in blood capillaries), the switch of water, oxygen, and other nutrients turns into easy. The damping tends to react in contradictory ways.
Here, we scrutinize the influence of diverse stipulations on temperature evolutions. The temperature evolutions are parabolic, via a maximum temperature level in the center of the channel. The consequences of viscous dissipation, which increases the temperature in the middle of the conduit, may discuss these patterns. The viscosity of the fluid causes this event, which transforms kinetic energy in the fluid into heat energy in it. Figure 3a indicates that the temperature of the fluid augments via an enhance in the maximum electro-osmotic velocity. Thus, the temperature profile diminishes for rising Debye–Hückel term (See Fig. 3b). Figure 3c is plotted to observe the influence of the Jeffrey design over the temperature distribution. It indicates that temperature is an increasing function of the Jeffrey pattern. Figure 3d is plotted to observe the effect of β on the temperature distribution. β is the liquid's aptitude to release or protect heat to its locations. As an outcome, when β of the fluid in the canal is superior to the wall temperature, the liquid's thermal evaluation rises. The effect of α on temperature distribution is demonstrated in Fig. 3e. α increases the temperature profile, and when α amounts to absolutely zero, consistent viscosity may be derived. The liquid's α improves, the heat transports prospective eliminates and increases the temperature profile. Figure 3f shows that larger values of Br improve the temperature profile. It is through an argument that less heat conducts the viscous dissipation. Br illustrates dissipation intensity. Known that the wall temperature is convectively adjusted, heat transports are just considered due of the effects of heat dissipation. A similar pattern is seen for increasing values of amplitude ratio (See Fig. 3g). It has been observed that the temperature level increase is seen for the rising importance of flexible stress and mass per unit is parameter. The opposite behavior is spotted for an increasing value of the viscous damping force parameter (See Fig. 3h).
The repercussions of various criteria on concentration profiles are shown in Figs. 4 and 5. The concentration distribution behaves conflicting to that of temperature distribution in Fig. 4. This behavior is anticipated physically because heat and mass are known to be opposite to straight proportion. Also, the profiles expose particle matter in the fluid that is more at the periphery than in the central position of the channel. This behavior assists in spreading necessary nutrients to nearby tissues and cells in the blood and other fluxes. Figure 5 is drawn to observe the effect of Soret and Schmidt number on the velocity profiles. The figures reveal that the concentration profile substantially diminishes with an augment in the value of the Soret and Schmidt number.
It is usually known that the phenomenon of trapping is an integral element of peristaltic research studies. The liquid, therefore, caught within the bolus is pushed forward along through the peristaltic wave. Figure 6 shows a streamlined makeup for various \({U}_{hs}\). It shows that the build-up of streamlines reduces through a rise in \({U}_{hs}\). Hence, stronger \({U}_{hs}\) means a more powerful electrical field; the diversity of enclosed boluses considerably reduces for high values of \({U}_{hs}\). Figure 7 shows that the combination of enclosed boluses increases with arise in the electro-osmotic criterion. For greater \(m{}_{e}\), the enclosed bolus appears stronger in EDL. Figure 8 illustrates the streamlines for varying Jeffrey specifications. It reveals that the streamlines considerably increase with arise in the value of the Jeffrey parameter. Similar behavior is noticed for a boost in the importance of α, flexible tension, mass per unit area, and viscous damping force parameter (See Figs. 9 and 10).
5 Conclusions
The influences of electro-osmotic, variable liquid properties, and wall properties toward the peristaltic flow of Jeffrey liquid via a uniform conduit are analyzed. MATLAB 2020a programming is utilized to confer the effect of critical expressions toward concentration, velocity, temperature level, and streamlines. The findings seen in this article have potential implications in both medical research and industry. Moreover, considering slip and changeable liquid properties in peristaltic movement, physical conditions such as a tapered/asymmetric uneven artery via a porous medium can be implemented in future research. This work gives a fair theoretical estimation for further research in this way. The main findings of the scheme are summarized as:
-
The velocity profiles rise for larger values of optimum electro-osmotic velocity.
-
The electro-osmotic specification is observed to be a reducing function of velocity.
-
The Jeffrey criterion improves the temperature and velocity profiles.
-
An increase in the velocity and temperature profiles is observed for increasing value of α.
-
The temperature profile improves for more significant values of variable thermal conductivity.
-
The concentration profile significantly diminishes for more significant values of Soret and Sc.
-
The accumulation of streamlines reduces through a boost in maximum electro-osmotic velocity.
-
The number of enclosed boluses increases through a boost in the electro-osmotic criterion.
Abbreviations
- \(b\) :
-
Amplitude of the wave
- \({T}_{av}\) :
-
Average temperature
- \(x\) :
-
Axial coordinate
- \({K}_{B}\) :
-
Boltzmann constant
- \(Br\) :
-
Brinkman number
- \({n}_{0}\) :
-
Bulk concentration
- \({z}_{v}\) :
-
Charge balance
- \({n}_{2}\) :
-
Coefficient of viscous damping force
- \(p\) :
-
Dimensionless pressure
- \(h\) :
-
Displacement of the wall
- \({E}_{c}\) :
-
Eckert number
- \({E}_{1}\) :
-
Elasticity parameter
- \({E}_{x}\) :
-
Electrical field in the x-direction
- \(e\) :
-
Electronic charge
- \({m}_{e}\) :
-
Electro-osmotic parameter
- (\(\overline{X }, \overline{Y }\)):
-
Fixed frame axes
- \(a\) :
-
Half width of the channel
- \({U}_{hs}\) :
-
Helmholtz–Smoluchowski velocity
- \({E}_{2}\) :
-
Mass term
- \({n}_{1}\) :
-
Mass per unit surface
- \(S\) :
-
Non-dimensional shear stress
- \({P}_{r}\) :
-
Prandtl number
- \({p}_{0}\) :
-
Pressure on the outside area of the wall due to the tension in the muscles
- \({R}_{e}\) :
-
Reynolds number
- \(Sc\) :
-
Schmidt number
- \(Sr\) :
-
Soret number
- \({C}_{p}\) :
-
Specific heat at constant pressure
- \(T\) :
-
Temperature
- \({K}_{T}\) :
-
Thermal diffusion ratio
- \(t\) :
-
Time
- \(y\) :
-
Transverse coordinate
- \(u,v\) :
-
Velocity components
- \({E}_{3}\) :
-
Viscous damping force parameter
- \(c\) :
-
Wave velocity
- \(\epsilon\) :
-
Amplitude ratio
- \(\Omega\) :
-
Concentration
- \({\lambda }_{D}\) :
-
Debye length
- \(\rho\) :
-
Density
- \(\lambda\) :
-
Wavelength
- \(\beta\) :
-
Variable thermal conductivity
- \(\phi\) :
-
Electric potential
- \({\lambda }_{1}\) :
-
Jeffrey term
- \(\psi\) :
-
Stream function
- \(\alpha\) :
-
Variable viscosity
- \(\theta\) :
-
Temperature
- \({\rho }_{e}\) :
-
Total charge density
- \(\tau\) :
-
Elastic tension
- \(\xi\) :
-
Dielectric permittivity
References
T W Latham Fluid motions in a peristaltic pump Master’s Thesis, Massachusetts Institute of Technology, Cambridge (1966)
K Raju and R Devantahan Rheological Acta 11 170 (1972)
M Kothandapani and S Srinivas International Journal of Nonlinear Mechanics 43 915 (2008)
C Rajashekhar, G Manjunatha, K V Prasad, B B Divya and H Vaidya Cogent Engineering 5 1495592 (2018)
S Srinivas, R Gayathri and M Kothandapani Computer Physics Communication 180 2115 (2009)
D Tripathi Journal of Fluids Engineering 133 121104 (2011)
M Gudekote and R Choudhari Journal of Advanced Research in Fluid Mechanics and Thermal Sciences 43 67 (2018)
H Vaidya, M Gudekote, R Choudhari and K V Prasad Multidisciplinary Modeling in Materials and Structures 14 940 (2018)
Z Abbas, M Y Rafiq, J Hasnain and T Javed Arabian Journal for Science and Engineering 46 1997 (2021)
R Djebali, F Mebarek-Oudina and R Choudhari Physica Scripta 96 085206 (2021)
O A Bég, T A Bég, R Bhargava, S Rawat and D Tripathi Journal of Mechanics in Medicine and Biology 12 1250081 (2012)
A Alsaedi, N Ali, D Tripathi and T Hayat Applied Mathematics and Mechanics 35 469 (2014)
D Tripathi, O A Beg, P K Gupta, G Radhakrishnamacharya and J Mazumdar Journal of Bionic Engineering 12 643 (2015)
R P Sharma, M C Raju, S K Ghosh, S R Mishraand and S Tinker Indian Journal of Pure & Applied Physics 58 877 (2020)
G Kumaran, R Sivaraj, V R Prasad, O A Beg and R P Sharma Physica Scripta 96 025222 (2021)
A K Verma, A K Gautam, K Bhattacharyya and R P Sharma Sadhana 46 98 (2021)
P K Krishna, R P Sharma and N Sandeep Nuclear Engineering and Technology 49 1654 (2017)
N Sandeep, R P Sharma and M Ferdows Journal of Molecular Liquids 234 437 (2017)
R P Sharma, P Murthy and D Kumar Journal of Nanofluids 6 80 (2017)
S Saranya, P Ragupathi, B Ganga, R P Sharma and A K A Hakeem Advanced Powder Technology 29 1977 (2018)
R P Sharma, R Seshadri, S R Mishra and S R Munjam Heat Transfer-Asian Research 48 2105 (2019)
S Jena, S R Mishra, P K Pattnaik and R P Sharma Latin American Applied Research-An international Journal 50 283 (2020)
P S Rao, O M Prakash, S R Mishra and R P Sharma Indian Journal of Geo-Marine Sciences 49 889 (2020)
S S Payad, N Sandeep and R P Sharma Biointerface Research in Applied Chemistry 11 11499 (2021)
G Kumaran, R Sivaraj, V R Prasad, O A Beg and R P Sharma Physica Scripta 96 025222 (2021)
Z M Mburu, S Mondal, P Sibanda and R Sharma Journal of Thermal Engineering 7 845 (2021)
O D Makinde, M G Reddy and K V Reddy Journal of Applied and Fluid Mechanics 10 1105 (2017)
K Das, R P Sharma and P R Duari International Journal of Applied Mechanics and Engineering 22 827 (2017)
M G Reddy, K V Reddy and O D Makinde International Journal of Applied and Computational Mathematics 3 3201 (2017)
P K Krishna, N Sandeep and R P Sharma European Physical Journal Plus 132 202 (2017)
R P Sharma and S R Mishra Measurement and control B 87 250 (2018)
R P Sharma, O D Makinde and I L Animasaun Defect and Diffusion Forum 387 308 (2018)
R P Sharma, S M Ibrahim, M Jain and S R Mishra Indian Journal of Pure and Applied Physics 56 732 (2018)
R P Sharma, M C Raju, O D Makinde, P R K Reddy and P C Reddy Defect and Diffusion Forum 392 1 (2019)
R P Sharma, S Tinker, B J Gireesha and B Nagaraja International Journal of Applied Mechanics and Engineering 25 103 (2020)
R P Sharma and S R Mishra International Journal of Fluid Mechanics Research 47 121 (2020)
K Das, R P Sharma and A Sarkar Journal of Computational Design and Engineering 3 330 (2016)
I Chabani, F Mebarek-Oudina and A A I Ismail Micromachines 13 224 (2022)
R P Sharma, N Acharya and K Das Indian Journal of Geo-Marine Sciences 49 641 (2020)
S Tinkera, S R Mishra and R P Sharma Indian Journal of Pure and Applied Physics 58 558 (2020)
S Marzougui, F Mebarek-Oudina, M Magherbi and A Mchirgui International Journal of Numerical Methods for Heat & Fluid Flow (2021) https://doi.org/10.1108/HFF-04-2021-0288
R P Sharma, N Indumati, S Saranya, B Ganga and A K A Hakeem Journal of The Indian Mathematical Society 87 261 (2020)
M M Khader and R P Sharma Mathematics and Computers in Simulation 181 333 (2021)
A Shafiq, F Mebarek-Oudina, T N Sindhu and A Abidi The European Physical Journal Plus 136 407 (2021)
K Swain, F Mebarek-Oudina and S M Abo-Dahab Journal of Thermal Analysis and Calorimetry 147 1561 (2022)
A S Warke, K Ramesh, F Mebarek-Oudina and A Abidi Journal of Thermal Analysis and Calorimetry (2021) https://doi.org/10.1007/s10973-021-10976-z
S M Abo-Dahab, M A Abdelhafez, F Mebarek-Oudina and S M Bilal Indian Journal of Physics 95 2703 (2021)
T Hayat, N Ali and S Asghar Acta Mechanica 193 101 (2007)
N Sher, S Nadeem and C Lee Results in Physics 3 152 (2013)
Q Hussain, S Asghar, T Hayat and A Alsaedi Applied Mathematics and Mechanics 36 499 (2015)
B B Divya, G Manjunatha, C Rajashekhar, H Vaidya and K V Prasad Alexandria Engineering Journal 59 693 (2020)
S Hamrelaine, F Mebarek-Oudina and M R Sari Journal of Advanced Research in Fluid Mechanics and Thermal Sciences 58 173 (2019)
S Chakraborty Journal of Physics D: Applied Physics 39 5356 (2006)
A Bandopadhyay, D Tripathi and S Chakraborty Phyics of Fluids 28 052002 (2016)
X Guo and H Qi Micromachines 8 341 (2017)
S Waheed, S Noreen and A Hussanan Applied Sciences 9 2164 (2019)
S Waheed, S Noreen, D Tripathi and D Lu Journal of Biological Physics 46 45 (2020)
S Noreen, S Waheed, D C Lu and D Tripathi International Communication in Heat and Mass Transfer 123 105180 (2021)
G H Tang, X F Li, Y L He and W Q Tao Journal of Non-Newtonian Fluid Mechanics 157 133 (2009)
D Tripathi, A Yadav and O A Bég The European Physical Journal Plus 132 173 (2017)
O A Beg, D Tripathi and A Sharma International Journal of Heat and Mass Transfer 111 138 (2017)
D Tripathi, A Yadav, O A Bég and R Kumar Microvascular Research 117 28 (2018)
D Tripathi, A Sharma and O A Beg Advanced Powder Technology 29 639 (2018)
J Prakash, A Sharma and D Tripathi Journal of Molecular Liquids 249 843 (2018)
D Tripathi, A Sharma and O A Bég Advanced Powder Technol. 29 639 (2018)
D Tripathi, R Jhorar, O A Bég and S Shaw Meccanica 53 2079 (2018)
J Prakash, K Ramesh, D Tripathi and R Kumar Microvascular Research 118 162 (2018)
R Jhorar, D Tripathi, M M Bhatti and R Ellahi Indian Journal of Physics 92 1229 (2018)
S Noreen and Q D Tripathi Thermal Science and Engineering Progress 11 254 (2019)
V K Narla and D Tripathi Microvascular Research 123 25 (2019)
S Hussain, N Ali and K Ullah Rheological Acta 58 603 (2019)
N Ali, S Hussain, K Ullah and O A Bég The European Physical Journal Plus 134 141 (2019)
A Sharma, D Tripathi, R K Sharma and A K Tiwari Physica A: Statistical Mechanics and its Applications 535 122148 (2019)
S Noreen, S Waheed, D C Lu and A Hussanan Alexandria Engineering Journal 59 4081 (2020)
D Tripathi, J Prakash, M G Reddy and J C Misra Journal of Thermal Analysis and Calorimetry 143 2499 (2021)
D Tripathi, J Prakash, M G Reddy and R Kumar Indian Journal of Physics 95 2411 (2021)
N Ali, Q Hussain, T Hayat and S Asghar Physics Letters A 372 1477 (2008)
S Nadeem, T Hayat, N S Akbar and M Y Malik International Journal of Heat and MAss Transfer 52 4722 (2009)
T Hayat, M I Khan, M Farooq, A Alsaedi, M Waqas and T Yasmeen International Journal of Heat and Mass Transfer 99 702 (2016)
H Vaidya, C Rajashekhar, G Manjunatha and K V Prasad The European Physical Journal Plus 134 231 (2019)
G Manjunatha, C Rajashekhar, H Vaidya, K V Prassad, O D Makinde and J Viharika Arabian Journal for Science and Engineering 45 417 (2020)
H Vaidya, C Rajashekhar, G Manjunatha and K V Prasad Journal of Brazilian Society of Mechanical Science and Engineering 41 52 (2019)
Y M Chu et al International Communication in Heat and Mass Transfer 119 104980 (2020)
B B Divya, G Manjunatha, C Rajashekhar, H Vaidya and K V Prasad Ain Shams Engineering Journal 12 2181 (2021)
H Vaidya, C Rajashekhar, K V Prasad, S U Khan, F Mebarek-Oudina, A Patil and P Nagathan SN Applied Sciences 3 186 (2021)
M M Rahman, H F Oztop, R Saidur, S Mekhilef and K Al-Salem Computers & Fluids 79 53 (2013)
F Selimefendigil and H F Öztop International journal of heat and mass transfer 108 156 (2019)
H Vaidya, C Rajashekhar, K V Prasad, S U Khan, A Riaz and J Vihariaka Biomechics and Modelling in Mechanobiology 20 1047 (2021)
C Rajashekhar, F Mebarek-Oudina, H Vaidya, K V Prasad, G Manjunatha and H Balachandra Heat Transfer-Asian Research 50 5106 (2021)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Choudhari, R., Mebarek-Oudina, F., Öztop, H.F. et al. Electro-osmosis modulated peristaltic flow of non-Newtonian liquid via a microchannel and variable liquid properties. Indian J Phys 96, 3853–3866 (2022). https://doi.org/10.1007/s12648-022-02326-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-022-02326-y