
Abstract
By considering the radial solutions for a semi-linear elliptic equation model of gyres and introducing exponential transformation, we derive a second-order ordinary differential equation, which acts as a new model for the ocean flow in arctic gyres. Then we investigate the solutions for constant vorticity, linear vorticity and nonlinear vorticity in this model.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Large areas spiraling circulations of water in ocean are called gyres, which are mainly driven by the winds and the Coriolis force (due the rotations of the Earth). Gyres are widely existing all over the world’s major ocean regions and controlled by land masses and bottom topography (see [1]). The winds mostly only act on the surface of the water, while the landmasses and the Coriolis force act beneath the surface (see [22]). Due to Coriolis force, gyres in the Northern Hemisphere rotate predominantly clockwise and gyres in the Southern Hemisphere rotate anticlockwise. Note that, due to the vanishing of the meridional component of the Coriolis force, gyres are not cross the equator (see [6, 16, 17]). There are three types of gyres. Tropical gyres are near the Equator but confined strictly to the Northern or Southern hemispheres (see [9,10,11, 20, 21]). Subtropical gyres are situated between polar and equatorial regions, where exists a gigantic ocean areas with thousands of kilometers of diameter (see [8]). Subpolar gyres are the smallest ones on the Earth and are situated in the polar regions (see [18]). In this paper, we will set our eyes on arctic gyres, which are distributed in the Arctic ocean. Arctic ocean is a semi-enclosed ocean almost completely surrounded by landmasses and is covered by permanent ice with thickness exceeding 2 m. The permanent ice floats on the ocean, slowly rotating clockwise, roughly centered on the North Pole (see [1,2,3,4,5, 24]). It is worth mentioning that the Antarctic is very different from the Arctic: the Antarctic is a single landmass encircled by a very powerful current known as the Antarctic Circumpolar Current (ACC). We refer to [7, 14, 18,19,20, 25,26,27,28] for the ACC.
In order to study the related properties of gyres, some simplifications are made to reduce its complexity. The horizontal velocity of gyres is \(10^{4}\) larger than the vertical velocity (see [23]). Ignoring the vertical velocity, a model of gyres in spherical coordinates as shallow-water flow on a rotating sphere is obtained (see [8]). In [2], this model is transformed into a plane semi-linear elliptic equation boundary value problem by stereographic projection, and then it is reduced to second-order ordinary differential equation by neglecting the change of azimuthal variations. Haziot replaces the stereographic projection by the Mercator projection, which reduces the model in [8] to a semi-linear elliptic equation that is simpler than the equation obtained recently in [2] (see [15]). Then Haziot uses a conformal map to map the semi-linear elliptic equation from the unbounded strip into the unit circle and considers the existence of solutions for constant vorticity and linear vorticity (see [14]).
In this paper, inspired by Haziot’s work in [14], we derive a second-order ordinary differential equation by considering the radial solutions for the semi-linear elliptic equation model of gyres and introducing exponential transformation, which acts as a new model for the ocean flow in arctic gyres. With the suitable asymptotic conditions and boundary conditions, we study the solutions of constant vorticity, linear vorticity and nonlinear vorticity in this model.
2 Preliminaries
As we know, the classical model of arctic gyres is derived by Constantin and Johnson, which is a model of gyres in spherical coordinates as shallow-water flow on a rotating sphere (see [8]). One can set \(\theta \in [0,\pi )\) the polar angle and \(\theta =0\) corresponds to the South Pole. Let \(\varphi \in [0,2\pi )\) be the azimuthal angle. Considering the model for gyres in spherical coordinates, the polar and azimuthal velocity components of the flow on the Earth are given by
respectively, where \(\psi (\theta ,\varphi )\) represents the stream function in spherical coordinates. Furthermore, the governing equation for gyres is given by
where \(\Psi (\theta ,\varphi )=\psi (\theta ,\varphi )+\omega \cos (\theta )\) is associated with the vorticity of the underlying motion of the ocean relative to the Earth’s surface, \( 2\omega \cos (\theta )\) represents the spin vorticity due the rotation of the Earth and \(F(\Psi -\omega \cos (\theta )) \) represents the ocean vorticity.
Using Mercator projection (see [13]), the change of variables are given by
Then the North Pole \((\theta =\pi )\) corresponds to \( {\tilde{x}}=-\infty \) and the equator \(\theta =\frac{\pi }{2} \) corresponds to \( {\tilde{x}} = 0\), where \( {\tilde{x}}<0 \) is in the Northern Hemisphere. Setting \( U({\tilde{x}},{\tilde{y}})=\psi (\theta ,\varphi ), \) one can reformulate the governing equation (1) as the following semi-linear elliptic equation
with boundary condition
where \({\tilde{x}}_{0}<0\) is a constant. In the North Pole, the asymptotic conditions are given by
where \(\psi _{0}\in \mathbb {R}\) is a constant, which is the value of the stream function \(\psi \) at the North Pole. In fact, the second asymptotic condition of (5) means that the flow is stagnant at the North Pole.
Haziot uses a conformal map to project (3) into a unit circle (see [6]). In order to map from the unbounded strip on the plane into the unit circle, setting \(\xi ={\tilde{x}}-{\tilde{x}}_{0}+\imath {\tilde{y}}, \) and then one can use the conformal map \(\Re =\exp (\xi )\) to get it into the unit circle. Let x and y be the new variables in the unit circle, which are defined by
and u(x, y) in the circle, such that \( u(x,y)=U({\tilde{x}},{\tilde{y}})\). Therefore, we have by (3) that
and boundary condition (4) becomes
where \(x^{2}+y^{2}=1\).
Consider \(u_{0}(x,y)=u_{0} \), where \( u_{0}\) is a constant that the boundary is a streamline. Similarly as in (5), the asymptotic conditions can be given by
Note that the second condition of (9) is necessary and sufficient for the North Pole to be a stagnation point. Now we turn to consider the radial solutions of (7) and set \(r=(x^{2}+y^{2})^{\frac{1}{2}}\). From (7), we have
Setting \(r=e^{t}\), we obtain by (10) that
Meanwhile, the boundary condition (8) becomes
and (9) reduces to
In addition, we consider
which represents no jet flow phenomenon.
3 Constant Vorticity Case
Constant vorticity represents specific gyres. In particular, the case of \(F=0\) is corresponding to precisely with the classical irrotational flow in two-dimensional (see [8]).
3.1 \(F=0\)
Considering (11) with \(F=0\) and (12) and the second equation of (13), one has
Now we are ready to state the first result.
Theorem 3.1
The explicit solution of (15) is written as
where \(dilog(x)=\int _{1}^{x}\frac{\ln (s)}{1-s}ds\).
Proof
Integrating the first equation of (15), we obtain
Using (17) and the second equation of (15), we have
Then putting (18) into (17) and integrating it, we have
By (19) and the third equation of (15), we obtain
Linking (19) and (20), one can obtain (16). This proof is completed. \(\square \)
Considering (11) with \(F=0\) and (12) and (14), one has
Now we are ready to state the second result.
Theorem 3.2
The explicit solution of (21) is written as
The calculation is similar to that of Theorem 3.1. Here, we omit it.
3.2 \(F=c~(c\ne 0)\)
Considering (11) with \(F=c\) and (12) and the second equation of (13), one has
Now we are ready to state the third result.
Theorem 3.3
The explicit solution of (22) is written as
The calculation is similar to that of Theorem 3.1. Here, we omit it.
Considering (11) with \(F=c\) and (12) and (14), one has
Now we are ready to state the fourth result.
Theorem 3.4
The explicit solution of (23) is written as
The calculation is similar to that of Theorem 3.1. Here, we omit it.
To end this section, we apply our results to deal with the arctic gyres, which are located between the North Pole and \(84^{\circ }\) N (which is approximately equal to \(\frac{14}{15}\pi \)). From the Mercator projection, we have \({\tilde{x}}_{0}=-\ln (\tan (\frac{14\pi }{30}))\approx -2.253.\) In particular, we can take a typical approximation of \(\omega \) that is 4650 (see [8]). Without lose of generality, we can set \(u_{0}=0\). In terms of the original spherical variables \((\theta ,\varphi )\), we have by (2) and (6) that
Recalling \(t=\ln (r)=\ln (x^{2}+y^{2})^{\frac{1}{2}}\), we have
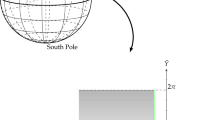
Then \(\psi (\theta ,\varphi )=u(t)=\psi (\theta )\) is independent of \(\varphi \). Fixed \(\theta =\theta _{1}\), \(\psi (\theta _{1},\varphi )\) is a streamline, where \(\theta \in [\frac{14}{15}\pi ,\pi )\) and \(\varphi \in [0,2\pi )\) (see Fig. 1).

Under \(F=0\) and the asymptotic conditions specified by (5), the change trend of stream function \(\psi \) is monotonic increasing with respect to variable \(\theta \) from \(84^{\circ }\) N to the North Pole and independent of \(\varphi \). It shows that the North Pole is a stagnation point and the center for the arctic gyres
4 Linear Vorticity Case
Linking (13), we assume
where \(N>0\) is chosen large enough.
Now considering (11) with \(F=au+b\) (where a, b \(\in {\mathbb {R}}\)) and (24), one has
where
Set \( U(t)=(u'(t),u(t))^\textrm{T}\), then \(U(-N)=(u'(-N),u(-N))^\textrm{T}=(0,\psi _{0})^\textrm{T}\).
Therefore, (25) can be written as the following form
with the constraint condition \(U(-N),\) where
From [20], the following matrix function
solves \(\Phi '(t,-N)={\tilde{A}}(t)\Phi (t,-N),~~-N\le t\le 0,\quad \Phi (-N,-N)=I\), where I denotes the identity matrix.
Therefore, the solution of (26) can be written as (see [29])
Finally, the solution of (25) can be derived
Considering (11) with (13), we have
We consider again the linear case \(F(u)=au+b\). Then (27) has a form
for
We solve (28) on a Banach space \(X=C_b(\mathbb {R}_-)\) of all bounded functions \(u:\mathbb {R}_-\rightarrow \mathbb {R}\) with a norm \(\Vert u\Vert =\sup \nolimits _{t\in \mathbb {R}_-}|u(t)|\). Note
We see that any solution \(u\in X\) of (28) satisfies \(\lim \nolimits _{t\rightarrow -\infty }u(t)=\psi _0\) and \(\lim \nolimits _{t\rightarrow -\infty }e^{-t}u'(t)=0\) with a rate \(e^{4t}\). Moreover, \(A: X\rightarrow X\) is a bounded linear operator mapping the unit ball \(\{u\in X: \Vert u\Vert \le 1\}\) into the set
Applying the Arzelà-Ascoli theorem, we can see that the set
is precompact in X. Thus A is compact. Next, if \(\lambda \ne 0\) is an eigenvalue of A with an eigenfunction u, then for any \(t_0<0\), we have
So, if \(|\lambda |>\frac{e^{4t_0}}{4}\), then \(\sup \nolimits _{t\le t_0}|u(t)|=0\), and noting
we have \(u(t)=0\) on \(\mathbb {R}_-\). This leads, since A is compact, to the fact that the spectrum of A is \(\{0\}\) and thus the spectral radius of A is 0. Consequently, (28) is uniquely solvable
Moreover, the Neumann lemma gives
so we can solve (29) approximately. An alternative way is to use an iteration procedure
In summary, we have the following result.
Theorem 4.1
(11) with (13) for \(F(u)=au+b\), \(a,b\in \mathbb {R}\) has a unique solution given by (29). Moreover, (12) or (14) hold if and only if
or
respectively.
Remark 4.2
(32) and (33) are linear in \((b,\omega ,\psi _0,u_0)\) while nonlinear but analytic in a. They give surfaces in the parametric space \((a,b,\omega ,\psi _0,u_0)\) that the unique solution from Theorem 4.1 satisfies also either (12) or (14). These surfaces can be approximately computed for a concrete value of \({\tilde{x}}_0\) by using either (30) or (31). Applying (31), we have approximated surfaces \(u_{n}(0)-u_0=0\) and \(u_n'(0)=0\), respectively. For fixed \((\omega ,\psi _0,u_0)\), we have functions
and
respectively.
5 Nonlinear Vorticity Case
In this section, we study the existence and uniqueness of continuous solutions for (11) with suitable asymptotic conditions and boundary conditions.
5.1 Lipschitz-Type Nonlinear Vorticity Case
Firstly, we show the existence and uniqueness of continuous solution for (11) with asymptotic conditions by the Banach’s fixed-point theorem. Linking the second condition in (13) and integrating (11), we obtain
Integrating (34), we have
in view of the first condition in (13). Linking (34) and the second condition in (13), by L’Hospital rule, we have
which implies that u(t) is a bounded function on \((-\infty ,0]\) (see (38)).
Next, we investigate the existence and uniqueness of continuous solution for integral equation (35).
Theorem 5.1
Assume that \(F:\mathbb {R}\rightarrow \mathbb {R}\) is Lipschitz continuous, i.e., there exists a constant \(M>0\) such that
then integral equation (35) has a unique continuous solution \(u:(-\infty ,0]\rightarrow \mathbb {R}\), which is a unique solution of (11) with (13).
Proof
Choose \(t_{0}\le 0\) such that \(\frac{e^{2{\tilde{x}}_{0}}}{dilog(e^{2{\tilde{x}}_{0}}e^{2t_{0}}+1)+2\ln (e^{2{\tilde{x}}_{0}}e^{2t_{0}}+1)}>M\). For all bounded functions \(u\in X\), we consider the Banach space X defined above.
Consider the operator \({\mathcal {T}}: X\rightarrow X\) as follows
Firstly, we check that \({\mathcal {T}}\) is well-defined with X. For each \(t\in (-\infty ,0]\), linking (36), we have
which shows that \({\mathcal {T}}: X\rightarrow X\).
Then for any \(u,v\in X\), we obtain that
where we use the fact
By using the contraction principle, \({\mathcal {T}}\) has a unique fixed-point on X. This fixed-point is the unique solution to (35) on \((-\infty ,t_{0}]\). If \(t_{0}=0\), then result holds. If \(t_{0}<0\), then the linear growth rate of \(F(\cdot )\) prevents blow-up in finite time, so that we may extend the solution from \((-\infty ,t_{0}]\) to \((-\infty ,0]\). Assume that \(F(\cdot )\) is Lipschitz continuous, we obtain the uniqueness of solution to (35) on \((-\infty ,0]\). The proof is completed. \(\square \)
Theorem 5.2
In the sense of supremum norm, the solution of Theorem 5.1 (on the infinite interval \((-\infty ,0]\)) is stable with respect to variations of \(\psi _{0}\).
Proof
Let \(u\in X\) and \({\tilde{u}}\in X\) be two solutions of (35) with \(\lim \nolimits _{t\rightarrow -\infty }u(t)=\psi _{0}\) and \(\lim \nolimits _{t\rightarrow -\infty }{\tilde{u}}(t)={\tilde{\psi }}_{0}\), respectively. Choose \(t_{0}\le 0\) such that
Setting \(\Vert u\Vert =\sup \nolimits _{t\le t_{0}}{|u(t)|}\), we have
so that
Using (40) and (41), we obtain that
Then, by (39), we have
since
Due to \(|u(t_{0})-{\tilde{u}}(t_{0})|\le \Vert u-{\tilde{u}}\Vert \), from (41), we have
If \(t_{0}=0\), then the proof is completed. Otherwise, for \(t_{0}<0\), we see that \(u(t_{0})\) is the value for (35) at \(t=t_{0}\), starting with data \(u(t_{0})\) and \(u'(t_{0})\) at \(t=t_{0}\). Let
then we have
with initial data
Linking the second condition of (46) and integrating (45) on [0, s], we obtain
Using the first condition of (46), then integrating both sides of (47) on [0, s], which yields
Let \({\tilde{v}}\in X\) also be a solution of the integral equation (48), then we have
Taking (42) and (43) into account, we obtain that
By the Gronwall’s inequality (see [12]), we have
where
and
Thus, (49) reduces to
Then linking (44) and (50), we obtain
where \({\tilde{\gamma }}_{1}(t)=e^{-2{\tilde{x}}_{0}}[dilog(e^{2{\tilde{x}}_{0}}e^{2t}+1)+2\ln (e^{2{\tilde{x}}_{0}}e^{2t}+1)],~t_{0}\le t \le 0\). Linking (43) and (51), u(t), which is the solution obtained in Theorem 5.1, continuously depends on the variations of \(\psi _{0}\). The proof is completed. \(\square \)
5.2 General Nonlinear Vorticity Case
Next, we will focus on studying the existence a continuous solution for the nonlinear second-order ordinary differential equation (11) with boundary conditions by Schauder’s fixed-point theorem (see [21]). Using (14) and integrating (11) on [t, 0], then we obtain
where
Integrating both sides of (52) on [t, 0] and using (12), we have
Next, we show the existence a continuous solution for integral equation (53).
Theorem 5.3
Assume that \(q(\cdot ),~p(\cdot ):(-\infty ,0]\rightarrow \mathbb {R}\) and \(F(\cdot ): \mathbb {R}\rightarrow \mathbb {R}\) are continuous. Denoted by
we suppose that there exists a constant \(h>0\) such that for
it holds \(M_{h}\le \frac{h}{2TC_{1}},~C_{2}\le \frac{h}{2T}\). Then (53) has at least one continuous solution u on \([-T,0]\).
Proof
Consider the Banach space
endowed with the maximum norm
Set
and the operator \({\mathcal {F}}: K\rightarrow K\) is defined by
Then we prove that \({\mathcal {F}}\) defined in (54) has a fixed-point on K by the following four steps.
Step 1. Let \(u_{n}(t)\in K,~n=1,2,...\), and \(u_{n}(t)\rightarrow u_{*}(t)\in U_{0},~n\rightarrow \infty \). We have
which shows that K is closed. Let \(u_{i}(t)\in K,~i=1,2,...,m,~m\in \mathbb {N^{*}}\) and \(\sum \nolimits _{i=1}^{m}\lambda _{i}=1,~\lambda _{i}\geqslant 0\). Then we obtain
so that
which means that K is convex. Obviously, K is a closed and convex subset on \(U_{0}\).
Step 2. We check that \({\mathcal {F}}\) is well-defined with K. For each \(t\in [-T,0]\), we have
which shows that \({\mathcal {F}}(K)\subset K\).
Step 3. Let us now prove that \( {\mathcal {F}}(K)\) is relatively compact in \(U_{0}\). Differentiating both sides of (54) with respect to t, we have
For all \(t\in [-T,0]\), we obtain
Then let \(\{u_{n}\}\) be an arbitrary sequence in K, by the mean value theorem yields
which implies that \(\{{\mathcal {F}}u_{n}\}\) is equicontinuous function in \(U_{0}\). Linking Step 2, \(\{{\mathcal {F}}u\}\) is uniformly bounded in \(U_{0}\). Therefore the Arzelà-Ascoli theorem guarantees that \(\{{\mathcal {F}}u\}\) is relatively compact in \(U_{0}\).
Step 4. We confirm that \({\mathcal {F}}:K\rightarrow K\) is continuous. Given a fixed \(\varepsilon >0\), due to \(F:[u_{0}-h,u_{0}+h]\rightarrow \mathbb {R}\) is uniformly continuous, therefore there exists a constant such that if \(u,~{\bar{u}}\in [u_{0}-h,u_{0}+h]\) with \(|u-{\bar{u}}|<\delta \), then
where \(q_{*}=\max \nolimits _{t\in [-T,0]}q(t)\). For arbitrary \(u_{1},~u_{2}\in K\) with \(\Vert u_{1}-u_{2}\Vert <\delta \), we have
Therefore, we have \(\Vert {\mathcal {F}}u_{1}-{\mathcal {F}}u_{2}\Vert \le \varepsilon \). Then the operator \({\mathcal {F}}:K \rightarrow K\) is continuous.
We have verified that all assumptions of the Schauder’s fixed-point theorem are satisfied. There exists at least one \(u\in K\) such that \({\mathcal {F}}u=u\), which corresponds to a continuous solution of (53) on \([-T,0]\). \(\square \)
Remark 5.4
Applying our results to deal with the arctic gyres, one can determine uniform upper bounds for \(C_{1}\) and \(C_{2}\) as follow
where \({\tilde{x}}_{0}\approx -2.253\).
To end this section, we present a simple but rather general existence and uniqueness result.
Theorem 5.5
Set
If there are constants \(\kappa _1<\kappa _2\) such that
then (11) with (13) has a solution with \(\kappa _1\le u(t)\le \kappa _2\) for all \(t\le 0\). In addition, if \(F(\cdot )\) is Lipschitz continuous on \([\kappa _1,\kappa _2]\), i.e.
then this solution is unique.
Proof
We consider the above operator
It is to check, that inequalities of (55) implies
Clearly \(W_{\kappa _1,\kappa _2}\) is a convex, bounded and closed subset of X. Since we already know that \({\mathcal {T}}\) is a compact mapping, we can apply the Schauder’s fixed-point theorem for the existence part of our theorem. The uniqueness follows from the proof Theorem 5.1. This proof is finished. \(\square \)
Remark 5.6
(55) is equivalent to
Since always it holds
(56) implies that we need
On the other hand, if (57) is satisfied, then (55) is equivalent to
6 Ulam–Hyers Type Stability
In this section, we consider the Ulam–Hyers type stability of the equation (11) with asymptotic conditions (13).
Let \(\varepsilon , \lambda _{\mu }\) be two positive real numbers and let \(\mu : (-\infty ,t_{0}]\rightarrow [0,+\infty ),\ t_0\le 0\) be a continuous and nondecreasing function satisfying
For example, we set \(\mu (t)=\rho e^{\alpha t}, ~-\infty < t \le 0,\) where \(\rho >0\) and \(\alpha \ge 1\). Then (59) holds. In fact,
Consider
and
Definition 6.1
(see [30]) For \(\forall ~ \varepsilon >0\), if there exists a real number \(C_{1}>0\) such that for any solution \({\hat{u}}\in C^{2}([t_{0},0],\mathbb {R})\) of (61) with asymptotic conditions (13), there exists a solution \(u\in C^{2}([t_{0},0],\mathbb {R})\) of (11) with asymptotic conditions (13) and
then the equation (11) with asymptotic conditions (13) is Ulam–Hyers stable.
Definition 6.2
(see [30]) For \(\forall ~ \varepsilon >0\), if there exists a real number \(C_{\mu }>0\) such that for any solution \({\hat{u}}\in C^{2}((-\infty ,t_{0}],\mathbb {R})\) of (60) with asymptotic conditions (13), there exists a solution \(u\in C^{2}((-\infty ,t_{0}],\mathbb {R})\) of (11) with asymptotic conditions (13) and
then the equation (11) with asymptotic conditions (13) is Ulam–Hyers–Rassias stable.
Theorem 6.3
Assume that the conditions of Theorem 5.1 hold, then the equation (11) with asymptotic conditions (13) is Ulam–Hyers–Rassias stable on \((-\infty ,t_{0}]\).
Proof
Let \({\hat{u}}\in C^{2}((-\infty ,t_{0}],\mathbb {R})\) be a solution of (60) with asymptotic conditions (13). From (59) and (60), we have
where \(g(t)=\psi _{0}+2\omega e^{-2{\tilde{x}}_{0}}\Big [\frac{1}{e^{2{\tilde{x}}_{0}}e^{2t}+1}+2\ln (e^{2{\tilde{x}}_{0}}e^{2t}+1)+dilog(e^{2{\tilde{x}}_{0}}e^{2t}+1)-1\Big ],~-\infty < t\le t_{0}.\)
By the Gronwall’s inequality, we obtain that
i.e., the equation (11) with asymptotic conditions (13) is Ulam–Hyers–Rassias stable. The proof is completed. \(\square \)
Theorem 6.4
Assume that the conditions of Theorem 5.1 hold, then the equation (11) with asymptotic conditions (13) is Ulam–Hyers stable on \([t_{0},0]\).
Proof
Linking (44) and (48), we obtain that
Let \({\hat{u}}\in C^{2}((-\infty ,t_{0}],\mathbb {R})\) be a solution of (61) with asymptotic conditions (13). From (61) and (62) we have
where \(h(t)=u(t_{0})+u'(t_{0})(t-t_{0})+\int _{t_{0}}^{t}(t-s)8\omega \frac{(e^{{\tilde{x}}_{0}}e^{2\,s}-e^{-{\tilde{x}}_{0}})e^{4\,s}}{(e^{{\tilde{x}}_{0}}e^{2\,s}+e^{-{\tilde{x}}_{0}})^{3}}ds,~~t_{0}\le t\le 0.\)
By the Gronwall’s inequality, we have
i.e., the equation (11) with asymptotic conditions (13) is Ulam–Hyers stable. This proof is finished. \(\square \)
7 Conclusion
We study a new second-order ordinary differential equation model of arctic gyres, which is derived by considering the radial solutions for the semi-linear elliptic equation model of gyres in [15] and introducing exponential transformation. With the suitable asymptotic conditions and boundary conditions, we provide explicit solutions of constant vorticity and linear vorticity. Then we study the existence and uniqueness of continuous solutions for the nonlinear vorticity with the fixed-point techniques. Finally, we show that Lipschitz-type nonlinear vorticity with asymptotic conditions for arctic gyres is Ulam–Hyers stable on finite interval and Ulam–Hyers–Rassias stable on infinite interval.
Data Availibility Statement
No data.
References
Apel, J.: Principles of Ocean Physics. Academic Press, London (1987)
Chu, J.: On a differential equation arising in geophysics. Monatsh. Math. 187, 499–508 (2018)
Chu, J.: On a nonlinear model for arctic gyres. Ann. Mat. Pura. Appl. 197, 651–659 (2018)
Chu, J.: On a nonlinear integral equation for the ocean flow in arctic gyres. Q. Appl. Math. 76, 489–498 (2018)
Chu, J.: Monotone solutions of a nonlinear differential equation for geophysical fluid flows. Nonlinear Anal. 166, 144–153 (2018)
Constantin, A., Ivanov, R.I.: Equatorial wave-current interactions. Conmmun. Math. Phys. 370, 1–48 (2019)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal flow as a model for the Antarctic Circumpolar Current. J. Phys. Oceanogr. 46, 3585–3594 (2016)
Constantin, A., Johnson, R.S.: Large gyres as a shallow-water asymptotic solution of Euler’s equation in spherical coordinates. Proc. R. Soc. Lond. Ser. A. 473, 20170063 (2017)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal equatorial flow with a free surface. J. Phys. Oceanogr. 46, 1935–1945 (2016)
Constantin, A., Johnson, R.S.: Ekman-type solutions for shallow-water flows on a rotating sphere: a new perspective on a classical problem. Phys. Fluids 31, 021401 (2019)
Constantin, A., Johnson, R.S.: The dynamics of waves interacting with the Equatorial Undercurrent. Geophys. Astrophys. Fluid Dyn. 109, 311–358 (2015)
Coppel, W.A.: Stability and Asymptotic Behavior of Differential Equations. D. C. Heath and Company, Boston, Mass (1965)
Daners, D.: The Mercator and stereographic projections, and many in between. Am. Math. Mon. 119, 199–210 (2012)
Haziot, S.V.: Study of an elliptic partial differential equation modeling the ocean flow in Arctic gyres. J. Math. Fluid Mech. 23, 1–9 (2021)
Haziot, S.V.: Explicit two-dimensional solutions for the ocean flow in Arctic gyres. Monatsh. Math. 189, 429–440 (2019)
Henry, D., Martin, C.I.: Free-surface, purely azimuthal equatorial flows in spherical coordinates with stratification. J. Differ. Equ. 266, 6788–6808 (2019)
Li, Q., Fečkan, M., Wang, J.: Monotonicity of horizontal fluid velocity and pressure gradient distribution beneath equatorial Stokes waves. Monatsh. Math. 198, 805–817 (2022)
Marynets, K.: A weighted Sturm-Liouville problem related to ocean flows. J. Math. Fluid Mech. 20, 929–935 (2018)
Marynets, K.: A nonlinear two-point boundary-value problem in geophysics. Monatsh. Math. 188, 287–295 (2019)
Miao, F., Fečkan, M., Wang, J.: Constant vorticity water flows in the modified equatorial \(\beta \)-plane approximation. Monatsh. Math. 197, 517–527 (2020)
Miao, F., Fečkan, M., Wang, J.: Stratified equatorial flows in the \(\beta \)-plane approximation with a free surface. Monatsh. Math. 200, 315–334 (2023)
Vallis, G.K.: Atmospheric and Oceanic Fluid Dynamics. Cambridge University Press, Cambridge (2017)
Viudez, A., Dritschel, D.G.: Vertical velocity in mesoscale geophysical flows. J. Fluid Mech. 483, 199–223 (2003)
Zhang, W., Fečkan, M., Wang, J.: Positive solutions to integral boundary value problems from geophysical fluid flows. Monatsh. Math. 193, 901–925 (2020)
Zhang, W., Wang, J., Fečkan, M.: Existence and uniqueness results for a second order differential equation for the ocean flow in arctic gyres. Monatsh. Math. 193, 177–192 (2020)
Wang, J., Fečkan, M., Zhang, W.: On the nonlocal boundary value problem of geophysical fluid flows. Z. Angew. Math. Phys. 72, 419–434 (2021)
Wang, J., Fečkan, M., Wen, Q., O’Regan, D.: Existence and uniqueness results for modeling jet flow of the Antarctic circumpolar current. Monatsh. Math. 194, 1–21 (2021)
Wang, J., Zhang, W., Fečkan, M.: Periodic boundary value problem for second-order differential equations from geophysical fluid flows. Monatsh. Math. 195, 523–540 (2021)
Rugh, R.C.: Linear System Theory. Prentice Hall, Upper Saddle River (1996)
Rus, I.A.: Ulam stability of ordinary differential equations. Stud. U. Babes-bol. Mat. 54, 125–133 (2009)
Acknowledgements
The authors are grateful to the referees for their careful reading of the manuscript and valuable comments. The authors thank the help from the editor too.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is partially supported by the National Natural Science Foundation of China (12161015), Guizhou Provincial Science and Technology Projects (Qian Ke He Ji Chu-ZK[2023]yiban034), Qian Ke He Ping Tai Ren Cai-YSZ[2022]002, the Slovak Research and Development Agency under the contract No. APVV-18-0308, and the Slovak Grant Agency VEGA No. 2/0127/20 and No. 1/0084/23.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, F., Fečkan, M. & Wang, J. Study on a Second-Order Ordinary Differential Equation for the Ocean Flow in Arctic Gyres. Qual. Theory Dyn. Syst. 22, 77 (2023). https://doi.org/10.1007/s12346-023-00778-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-023-00778-z
Keywords
- Arctic gyres
- Constant vorticity and linear vorticity
- Nonlinear vorticity
- Explicit solution
- Existence and uniqueness
- Ulam–Hyers stability