
Abstract
In this paper, existence and uniqueness of solutions for the nonlinear and linear models of the arctic gyres over \(84^{\circ }\) north latitude are studied by using the stereographic projection, which represents the streamline and no jet at the outside boundary. By using the fixed point technique, we prove the existence and uniqueness of the local solution of the nonlinear model. Next, we present the existence and uniqueness of the solution in the semi-infinite interval under the suitable asymptotic conditions. In the case of linear vorticity function, we give the explicit solutions by adopt the idea for linear ODEs.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Gyres is a circular ocean current driven by wind stress and the rotation of the earth under the Coriolis effect, see [1,2,3,4]. The gyres is deflected clockwise rotation in the Northern Hemisphere and counterclockwise rotation in the Southern Hemisphere due to the Coriolis effect. In ocean current, most of them rely on the equator to present a certain flow pattern in the North and South [5]. It is worth noting that the mid-latitudes do not appear at the equator as the meridional components of the coriolis force disappear, although they do encounter circulations [6].
Mathematical studies of ocean circulation are essential for predicting the characteristics of large-scale natural phenomena in the ocean. In the arctic gyres, the horizontal velocity is 0.01 m/s [7], which is about \(10^4\) times of the vertical velocity [8]. Therefore, in the case of ignoring the vertical velocity, the ocean circulation is approximately regarded as flowing on the rotating sphere by introducing a flow function, and the circulation model in the spherical coordinate system is transformed into a plane elliptic partial differential equation by using the stereographic projection [7]. Since the arctic region is covered by ice, waves do not effect, distinguishing the Southern Ocean (where current and wave interactions are important), see [9, 10], locating in the northern Arctic Ocean (above latitude \(84^{\circ }\)), the circulation is centered roughly to the north and slowly rotates clockwise on an ice surface more than 2 m thick [11].
Recently, Constantin and Johnson [7] transformed the Euler equation expressed in a rotating frame in spherical coordinates coupled with the equation of mass conservation and the appropriate boundary conditions into a second-order ordinary differential equation on a semi-infinite interval under the condition that azimuthal variations is ignored. It’s constrained by asymptotic conditions, the existence of solutions of the equation are studied in [12,13,14,15].
In the present paper, we study the existence and uniqueness of the solution of the nonlinear model of the arctic circulation by using the fixed point method under the mild conditions that the outer boundary is a first-class line and there is no jet. We extend the existence and uniqueness of local solutions in finite interval to a semi-infinite interval by requiring that the North Pole corresponds to a known flow function.

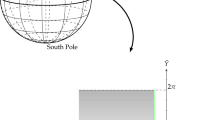
Azimuthal and polar angular spherical coordinates \(\varphi \) and \(\theta \) of a point P on the spherical surface of the Earth,with \(\theta =0\) and \(\theta =\pi \) correspond to the South and North Pole. Respectively, the stereographic projection of the unit sphere (center at origin) from the South Pole to the equatorial plane,the point P in the arctic region,the straight line connecting it to the South Pole intersects the equatorial plane in a point \(P'\) belonging to the interior of the circular region delimited by the Equator. The arctic gyres is mapped into a circular region within the equatorial plane
2 Preliminaries
A model for ocean current in spherical coordinates can be described. In terms of the stereographic projection from the South Pole, the azimuthal and polar velocity components of horizontal gyre flow given by
where \(\theta \in (0,\pi ]\) is polar angle with \(\theta =\pi \) corresponding to the North Pole,and \(\varphi \in [0,2\pi )\) represents the azimuthal angle (see Fig. 1), and \(\psi (\theta ,\varphi )\) is the stream function. In terms of the stream function \(\Psi \) associated with the vorticity of the motion of the ocean, defined by
where \(\Psi \) is not driven by the Earth’s rotation, the governing equation of ocean flow can be expressed as
where \(2\omega \cos \theta \) is the planetary vorticity (\(\omega >0\) is the non-dimensional Coriolis parameter), F is the oceanic vorticity which the form of ocean flow dictates the nature of the oceanic vorticity function. For example, the vorticity of water flow, the interaction of geophysical wave-current, and the ocean vorticity of these wind-driven flows can be considered as a fixed non-zero constant. Although the spin vorticity is determined, the vorticity associated with ocean motion can be selected to represent a specific circulation, especially, when the ocean vorticity disappears (that is \(F=0\)), the flow field is irrotational.

In the unit circle, triangle \({ OPS}\) is an isosceles triangle, if G is the middle point of PS, we can get \(\angle PSO=\frac{\pi }{2}-\theta \), through connecting OG, since \(OP=r\), this indicates that (4) is true
The stereographic projection is used from the South Pole to the equatorial plane on a unit sphere centered at the origin. Setting
where \((r,\phi )\) represents the polar coordinates on the equatorial plane, and r is a function of \(\theta \), whose geometric relationship is shown in Fig. 2, and it transforms (3) into
using Cartesian coordinates (x, y), the above equation is equivalent to a semilinear elliptic partial differential equation
where \(\Delta =\partial _{x}^{2}+\partial _{y}^{2}\) is the Laplace operator, expressed in accordance with the Cartesian coordinates on the equatorial plane, in which the unknown function \(\psi (x,y)\) represents the stream function. For a specified \(\omega \) and F, the gyre is obtained by solving (5) in a given plane region \({\mathcal {O}}\), with Dirichlet boundary data
where \(u_0\) means that the value of the flow function is at the boundary \(\partial {\mathcal {O}}\) of \({\mathcal {O}}\), and the corresponding streamline \(\psi =u_0\). According to the stereographic projection is employed, the plane region \({\mathcal {O}}\) corresponds to the ocean region, and the ocean region is located at the location of the gyre.
In this paper, we study the gyre problem in the Arctic Basin Ecozone which is the core northern part of the Arctic Ocean, and it is covered by more than 2 m of ice thickness. Between the North Pole and 84 degrees north latitude, there is an ocean area about 3.6 km deep, covering an area of about 1.27 million square kilometers, with no coast. The relatively constant ice sheets and floes in the arctic ocean, driven by the circulation of the Arctic Ocean, slowly float in a clockwise direction, roughly the center on North Pole. Setting corresponding to the planar region \({\mathcal {O}}=\{r:~0\le r<r_0\}\), with \(\theta \in [\frac{14\pi }{15},\pi ]\), \(r=\cot (\frac{\theta }{2})<\frac{1}{e}\), therefore \(r_0<\frac{1}{e}\), the considerations made in [3, 4, 6] show that. The flow of the arctic gyre, ignoring the azimuthal variation, corresponds to the radial symmetric solution \(\psi =\psi (r)\) of the problem (5)–(6). Setting \(t_0=-\,\ln (r_0)\ge 1\), the change of variables according to \(r=e^{-t}\) and
we can transforms (5) and (6) as the following second-order ordinary differential equation
with the constraint conditions
where \(u_0\) represents the stream function on the outer boundary of the ring region, and it expresses that the circle of latitude \(r=r_0\) is a streamline. We seek solutions of (2) in the interior of the circle \(r=r_0\), let \(\nabla _{(\theta ,\varphi )}\psi =(0,0)\) on the circle of latitude \(\theta =2\cot ^{-1}(r_0)\) in consideration of (1), since the component of azimuthal velocity disappears in the whole rotation region, we have equivalent boundary conditions
which shows that means that there is no jet flow phenomenon on the peripheral boundary.
3 Correlation results of nonlinear ocean vorticity
In this section, we study the existence and uniqueness of a continuous solution for the following nonlinear second order differential equation [arising from (7)]
where \(a(\cdot ),b(\cdot ):[t_0,+\infty )\rightarrow R\) are continuous, \(F(\cdot ,\cdot ):[t_0,+\infty )\times R\rightarrow R\) is continuous, and by the above case we consider the concrete forms
but we form our results for general cases. If u(t) is a solution of the problem (8)–(10), integrating the equation on \([t_0,t)\), we obtain
then integrating (12) on \([t_0,t)\), which leads to
Next, we study the existence and uniqueness for integral Eq. (13).
Theorem 3.1
Assume that \(a(\cdot ):[t_0,+\infty )\rightarrow R\) is continuous, \(b(\cdot ):[t_0,+\infty )\rightarrow R\) is integrable and \(F(\cdot ,\cdot ):[t_0,+\infty )\times R\rightarrow R\) is continuous. Denoted by
we suppose that there exists a constant \(h>0\) such that for
it holds \(M_h\le \frac{h}{2(T-t_0)J_1}\), \(J_2\le \frac{h}{2(T-t_0)}\).Then the integral Eq. (13) has at least one
continuous solution u on the interval \([t_0,T]\) and satisfying \(u(t_0)=u_0\).
Proof
Let U be the space of all continuous functions on \([t_0,T]\). Obviously U is the Banach space with the maximum norm \(\Vert u\Vert =\max \nolimits _{t\in [t_0,T]}|u(t)|\). We define the subset
of the space U. Set
and the operator \({\mathcal {T}}:K\rightarrow U\) be defined by
We consider the proof into the following four steps in order to prove that \({\mathcal {T}}\) defined in (14) has a fixed point on K.
Step 1 We prove K is a closed and convex subset on U. In fact, let \(u_i(t)\in K,i=1,2,\ldots ,m\), \(m\in N^{*}\), and
we have
This gives that
which shows that K is convex.
Let \({u_n(t)}\subset K,n=1,2,\ldots \), and \(u_n(t)\rightarrow u_*(t)\in U,\quad n\rightarrow \infty \). We have
which shows that K is closed.
Step 2 We prove that \({\mathcal {T}}(K)\subset K\). For each \(t\in [t_0,T]\), we have
which shows that \({\mathcal {T}}:K\rightarrow K\) is well-defined.
Step 3 We prove that \({\mathcal {T}}(K)\) is relatively compact in U. Derive both sides of Eq. (14) with respect to t, we have
For all \(t\in [t_0,T]\), we obtain
Let \(\{u_n\}\) be an arbitrary sequence in K, by using the mean value theorem, we obtain
which implies that \(\{{\mathcal {T}}u_n\}\) is continuous, nondecreasing function in U.
Obviously, it is easy to see from step two that \(\{{\mathcal {T}}u_n\}\) is uniformly bounded in U.
By using the Arzela–Ascoli theorem (see [16]), we obtain that \(\{{\mathcal {T}}u_n\}\) is relatively compact in U.
Step 4 We prove that \({\mathcal {T}}:K\rightarrow K\) is continuous.
Given a fixed \(\varepsilon >0\), since \(F(t,u):[t_0,T]\times [u_0-h,u_0+h]\rightarrow R\) is uniformly continuous, there exists a constant \(\delta >0\) such that if \(u,v\in [u_0-h,u_0+h]\) with \(|u-v|<\delta \), then
where \(a_*=\max \limits _{t\in [t_0,T]}a(t)\). Hence, for arbitrary \(u_1,u_2\in K\) with \(\Vert u_1-u_2\Vert <\delta \), by computations we can have
Therefore, we have
As a consequence, the operator \({\mathcal {T}}:K\rightarrow K\) is continuous.
We have illuminated that all assumptions of the Schauders fixed point theorem are satisfied. As a result, there exists \(u\in K\) such that \({\mathcal {T}}u=u\), which corresponds to a continuous solution of (13) on \([t_0,T]\). \(\square \)
Note for (11) we have
which gives uniform upper bounds for \(J_1\) and \(J_2\). Moreover, we have
which has a linear growth.
Theorem 3.2
Assume that \(a(\cdot ),b(\cdot ):[t_0,+\infty )\rightarrow R^{+}\) and \(F(\cdot ,\cdot ):[0,+\infty )\times R^{+}\rightarrow R^{+}\) are continuous. Suppose further that
where \(L(\cdot ):[0,+\infty )\rightarrow (0,+\infty )\) is continuous, nondecreasing and satisfies the condition
Then for any \(u_0>0\), Eq. (13) has a unique positive increasing continuous solution u on the interval \([t_0,+\infty )\) and satisfying \(u(t_0)=u_0\).
Proof
It is obviously \(u'(t)>0\) and \(u(t)>0\) because of the integral Eq. (12) and by the assumptions of theorem. We prove the uniqueness result. Let \(u_1(t)\) and \(u_2(t)\) be the two solutions of the integral Eq. (13) on \([t_0,T]\), \(T>t_0\) which are positive. Then we have
Let \(\upsilon (t)=|u_1(t)-u_2(t)|\), \(t \in [t_0,T]\), then \(\upsilon (t)\ge 0\) and
For \(G(r)=\int _{1}^{r}\frac{1}{L(s)}ds\), \(r>0\), we obtain \(G(0_+)=-\,\infty \), \(G(+\infty )=+\,\infty \). Given a fixed \(\varepsilon >0\), it follows from (16) that
By using the Bihary inequality (see [17]), we obtain
Letting \(\varepsilon \rightarrow 0\) we have \(G(\varepsilon )\rightarrow -\infty \), since \(G(0_+)=-\,\infty \), hence \(G^{-1}(-\,\infty )=0\). According to the assumptions of the theorem and (19), we obtain \(\upsilon (t)=0\), which shows that \(u_1=u_2\).
Now we show the existence. First, for any \(u_0\ge 0\) we consider
and Theorem 3.1 is applicable for
with
So we have a local existence and uniqueness. Next, assume that this solution is defined on the maximal interval \([u_0,{\hat{T}})\) for \({\hat{T}}\le +\infty \). If \({\hat{T}}<+\infty \) then we use
to get
The Bihary inequality implies
so u(t) can be extended to \({\hat{T}}\) and then to \({\hat{T}}+\delta \) for some \(\delta >0\), which is a contradiction. Thus \({\hat{T}}=+\,\infty \). Summarizing we get uniqueness and global existence on \([t_0,+\infty )\). \(\square \)
Remark 3.3
(15) is suitable for some function, for example,
Theorem 3.4
Assume that all assumptions in Theorem 3.2 are satisfied, and in the arctic gyres centered at the Arctic Ocean, asymptotic conditions can be considered
where \(\psi _0\in R\) is a constant, it can be considered as being fixed since the only role of the stream function at the North Pole and physically. If \(u=u(t)\) is the solution of Eq. (10) on the interval \([t_0,T]\), then the solution \(u=u(t)\) of Eq. (10) pass by \((t_0,u_0)\) can be extended to the interval \([t_0,+\infty ]\).
Proof
We can prove that the conclusion holds by using the continuation theorem of the solution of the differential equation (see [18]), therefore, we omit the detailed proof here. \(\square \)
4 Linear oceanic vorticity
If the ocean vorticity F in the Eq. (10) is linear, i.e.,
where \(l(\cdot ),m(\cdot ):[t_0,+\infty )\rightarrow R\) are continuous, we have
where
Now we are ready to present the following linear results.
Theorem 4.1
Assume that F is a linear function, \(p(\cdot ),q(\cdot ):[t_0,+\infty )\rightarrow R\) are continuous. If the \(p(\cdot )=p\) is a constant, then the solution of (21) is written as
On the other hand, if the \(p(\cdot )\) is not a constant, then the solution of (21) is written as
Proof
We set \({\mathbb {U}}(t)=(u'(t),u(t))^{T}\), then \({\mathbb {U}}(t_0)=(u'(t_0),u(t_0))^{T}=(0,u_0)^{T}={\mathbb {U}}_0\), (21) can be written as the equivalent form
with the constraint conditions
where
The homogeneous one of (24) is
We get the state transition matrix
since
and
If the system matrix \({\mathbb {P}}(t)\) and the state transition matrix \(\Phi _1(t,t_0)\) are commutative then \({\mathbb {P}}(t)=p\), p is a constant. Then, the state transition matrix of Eq. (25) is
The solution to the nonhomogeneous Eq. (24) can be obtained, we have
The solution of the Eq. (21) can be expressed as
Notice the constraints \(u'(t_0)=0\), \(u(t_0)=u_0\), (22) is verified.
On the other hand, if the system matrix \({\mathbb {P}}(t)\) and the state transition matrix \(\Phi _1(t,t_0)\) are not commutative, then the state transition matrix \(\Phi (t,t_0)\) can be derived by using iterative way in turn, we have
Therefore,
As a result, the solution of the Eq. (21) can be expressed for general linear ocean vorticity F, that is (23). \(\square \)
To end this section, we verify Theorem 4.1 by discussing two examples to which this result is practicable.
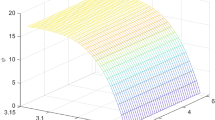
Example 4.2
We give a special case where the system matrix is a constant matrix, setting \(t_0=2,u(t_0)=2,p(t)=1\), that is
the eigenvalues of the matrix \({\mathbb {P}}(t)\) are \(\lambda _1=1,\lambda _2=-\,1\), in this way, we obtain the transformation matrix \({\mathbb {M}}\) and its inverse \({\mathbb {M}}^{-1}\) of the matrix \({\mathbb {P}}(t)\) into a diagonal linear Jordan canonical form
we obtain
the solution of Eq. (24) if \(q(t)=2\), that is
If \(p(t)=1\) and \(q(t)=2\), the solution to the Eq. (21) can be written as
Example 4.3
We assume \(q(t)=e^{t-2}\sqrt{e^{t-2}-1},~t\ge 2\), the conditions are satisfied in Example 4.2, another form of solution of Eq. (24) can be obtained
which shows that the solution of the Eq. (21)
5 Conclusions
Existence and uniqueness of solutions by a model for the ocean flow in arctic gyres has been studied by means of Schauder’s fixed point techniques and Bihary’s inequality. By adding appropriate boundary conditions, the original equation is transformed into an integral equation, and the existence and uniqueness of the solution is solved when the ocean vorticity is nonlinear. We also have discussed the solutions of the equations in linear cases, which follows two examples for verifying the rationality of the method.
References
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal flow as a model for the Antarctic Circumpolar Current. J. Phys. Oceanogr. 46, 3585–3594 (2016)
Constantin, A., Johnson, R.S.: The dynamics of waves interacting with the Equatorial Undercurrent. Geophys. Astrophys. Fluid Dyn. 109, 311–358 (2015)
Gabler, R.E., Petersen, J.F., Trapasso, L.M.: Essentials of Physical Geography. Thomson Brooks/Cole, Belmont (2007)
Garrison, T.: Essentials of Oceanography. National Geographic Society, Stamford (2014)
Apel, J.R.: Principles of Ocean Physics. Academic Press, London (1987)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal equatorial flow with a free surface. J. Phys. Oceanogr. 46, 1935–1945 (2016)
Constantin, A., Johnson, R.S.: Large gyres as a shallow-water asymptotic solution of Euler’s equation in spherical coordinates. Proc. R. Soc. A Math. 473, 20170063 (2017)
Viudez, A., Dritschel, D.G.: Vertical velocity in mesoscale geophysical flows. J. Fluid Mech. 483, 199–223 (2015)
Constantin, A., Monismith, S.G.: Gerstner waves in the presence of mean currents and rotation. J. Fluid Mech. 820, 511–528 (2017)
Walton, D.W.H.: Global Science from a Frozen Continent. Cambridge University Press, Cambridge (2013)
Wilkinson, T., Wiken, E., Bezaury-Creel, J., Hourigan, T., Agardy, T., Herrmann, H., Janishevski, L., Madden, C., Morgan, L., Padilla, M.: Marine Ecoregions of North America, p. 200. Commission for Environmental Cooperation, Montreal (2009)
Chu, J.: On a differential equation arising in geophysics. Mon. Math. 187, 499–508 (2018)
Chu, J.: On a nonlinear model for arctic gyres. Ann. Mat. Pura Appl. 197, 651–659 (2018)
Chu, J.: Monotone solutions of a nonlinear differential equation for geophysical fluid flows. Nonlinear Anal. 166, 144–153 (2018)
Chu, J.: On an infinite-interval boundary-value problem in geophysics. Mon. Math. 188, 621–628 (2019)
Zeidler, E.: Nonlinear Functional Analysis and Its Applications, I. Fixed-Point Theorems. Springer, New York (1986). Translated from the German by Peter R. Wadsack
Lipovan, O.: A retarded Gronwall-Like inequality and its applications. J. Math. Anal. Appl. 252, 389–401 (2000)
Miller, R.K., Michel, A.N.: Ordinary Differential Equations. Academic Press, New York (1982)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Adrian Constantin.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is partially supported by the National Natural Science Foundation of China (11661016), Training Object of High Level and Innovative Talents of Guizhou Province [(2016)4006], Major Research Project of Innovative Group in Guizhou Education Department [(2018)012], the Slovak Research and Development Agency under the Contract No. APVV-18-0308, the Slovak Grant Agency VEGA Nos. 1/0358/20 and 2/0127/20, and Natural Science Foundation of Guizhou Province ([2017]260)
Rights and permissions
About this article

Cite this article
Zhang, W., Wang, J. & Fečkan, M. Existence and uniqueness results for a second order differential equation for the ocean flow in arctic gyres. Monatsh Math 193, 177–192 (2020). https://doi.org/10.1007/s00605-020-01388-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00605-020-01388-6