
Abstract
This paper investigates the parameter and state estimation problems for a class of fractional-order nonlinear systems subject to the perturbation on the observer gain. The fractional-order nonlinear systems are linear in the unknown parameters and nonlinear in the states. Based on the equivalent integer-order differential equations, a fractional-order non-fragile observer and two kinds of fractional-order adaptive law are derived by applying the direct Lyapunov approach. The results are systematically obtained in terms of linear matrix inequalities and solved by YALMIP Matlab Toolbox. Two numerical examples with comparative result of two proposed adaptive laws are provided to illustrate the efficiency and validity of the proposed method.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus has a long history over 300 years, and it is a branch of mathematical analysis that deals with the possibility of taking real number or complex number powers of differentiation and integration operators. Fractional differential equations (FDEs), which are based on the fractional-order derivative and integration, outperform the ordinary differential equations (ODEs) owing to the ability of revealing inherit memory and hereditary properties of various material and processes in real physical world. Fractional-order dynamic systems, i.e., dynamic systems described by the FDEs, have attracted more and more attentions both in the scientific and engineering community in recent decades. Previous studies have demonstrated that many physical systems, such as heat diffusion process [1], viscoelastic systems [2], electrochemical systems [3], possess the memory and hereditary properties, and thus can be elegantly described with the FDEs.
Most recently, the tuning methods of fractional-order \(PI^{\lambda }D^{\mu }\) controller have become one of the most active fields in control engineering community [4,5,6,7]. The stabilization of first-order plus time delay systems with fractional-order \(PI^{\lambda }\) controller was studied in [6] based on the frequency domain specifications and flat phase constraint. A stochastic multi-parameters divergence method for online auto-tuning of fractional-order \(PI^{\lambda }\) controller was investigated in [7], and its advantage reflected in the robustness to the parameter fluctuations and model uncertainties of real physical systems. However, the studies mentioned above are mainly investigated in the frequency domain, and can hardly handle the nonlinearities, such as actuator saturation, parameter uncertainties, and so on. For integer-order nonlinear systems, the stability and stabilization problems are mainly investigated in the time domain.
In the time domain synthesis fields, the stability and stabilization problems of fractional-order state space models also attract great attentions. The sufficient and necessary conditions on the robust stability of fractional-order linear time invariant interval systems were proposed in [8, 9] for the \(0<\alpha <1\) and \(1<\alpha <2\) case, respectively. Inspired by the theoretical results of [8, 9], robust stabilization strategies of the fractional-order linear systems have been proposed in [10,11,12]. However, the eigenvalues location condition or the equivalent LMI conditions proposed in above-mentioned literatures are not enough to guarantee the stability of the closed-loop systems if nonlinearities are considered in the fractional-order systems. Motivited by the idea that the decay rate of fractional-order systems do not obey the exponential law, the Mittag–Leffler stability of fractional-order nonlinear systems was proposed for the commensurate case [13] and incommensurate case [14], respectively. The fractional derivative of Lyapunov function with quadratic form is an infinite series, which makes Mittag–Leffler stability theory not effective for the controller synthesis of fractional-order nonlinear systems. By the equivalent transformation between FDEs and infinite dimensional integer-order differential equations, the direct Lyapunov approach was adopted to investigate the stability of fractional-order nonlinear systems [15]. Based on the decay rate of Mittag–Leffler functions and Gronwall–Bellman inequality, the global asymptotic stability and stabilization of fractional-order nonlinear systems for the \(0<\alpha <2\) case were studied in [16, 17]. Another idea to investigate the stability of fractional-order systems is utilizing the integer-order Lyapunov approach and designing fractional-order sliding manifolds. Various sliding surfaces were proposed to deal with the robust stability and stabilization of fractional-order nonlinear systems according to the sliding mode theory [18, 19]. More recently, some researchers demonstrated that the fractional-order nonlinear systems can be represented by the continuous frequency distributed model by constructing an appropriate initial condition for infinite dimensional states in [20], which is important for the selection of the quadratic Lyapunov function for fractional-order nonlinear systems.
In engineering practices, the states of the considered systems are not always easily obtained due to technical or economic limitations. Moreover, it was showed that small perturbations on the controller coefficients would degrade the performance of closed-loop systems or fragile with respect to uncertainties [21]. Hence, it is necessary to investigate the actual states estimation strategy in such case. Currently, there are many observers have been proposed for fractional-order systems. Based on the theoretical results for integer-order systems, a Luenberger-like observer was proposed in [22]. In [23], a fractional-order observers was proposed for continuous-time fractional-order linear system with unknown parameters. An adaptive parameter estimation method for fractional-order linear systems was proposed in [24]. Moreover, by using continuous frequency distribution and indirect Lyapunov approach method, a series of full order or reduced order observers for a class of fractional-order nonlinear system were proposed in [25, 26]. In [27], a full order fractional-order observer for Lipschitz nonlinear fractional-order systems was designed by the method of linear matrix inequalities. Despite so many woks have been dedicated to the parameters or states estimation problems of fractional-order systems, however, the investigation of state estimation problem for fractional-order nonlinear system by the method of adaptive law is still an open problem.
To the best of our knowledge, the stability analysis of fractional-order nonlinear systems using the direct Lyapunov approach is also an unsolved problem, and only a few works were dedicated to this topic [28, 29]. Here we consider a class of fractional-order nonlinear systems which are linear in the unknown parameters and nonlinear in the states. The nonlinearities are assumed to be Lipschitz, and the perturbation on the observer gain is bounded. Our objective is to propose a systematic approach to design the non-fragile fractional-order observer and fractional-order adaptive law, which have stable observation on the unknown parameters and the errors between actual states and state estimations. The physical significance and practical applications of the present research can be summarized as follows:
-
1.
To make full use of the advantage of the memory and inherit properties of fractional calculus and then applied them to get a more accurate description of the states of real physical process.
-
2.
Obtain a better dynamic performance for practical processes and improve the reliability and availability of physical systems.
The rest of the paper is organized as follows: In Sect. 2, some necessary preliminaries and the problem formulation are introduced. The proposed nonlinear non-fragile observer and adaptive law are derived in Sect. 3. Two numerical examples are given in Sect. 4 to illustrate the effectiveness and validity of the proposed methods. Finally, Sect. 5 draws the conclusion.
Notations \(\mathbb {R}^{n \times m}\) is the set of real \(n \times m\) dimensional matrices, and \(\mathbb {R}^n\) stands for the set of real n dimensional vectors. The superscript T denotes the transpose of matrix or vector. The symbol \(*\) in some matrices indicates a symmetric structure. \(I_n\), \(0_{n \times m}\) denotes the \(n \times n\) dimensional identity matrix and \(n \times m\) dimensional zero matrix, respectively. The notation \(\Vert \cdot \Vert \) denotes any convenient norm.
2 Preliminaries and problem formulation
2.1 Preliminaries
Definition 1
[30] The \(\alpha \)-th (\(\alpha >0\)) order fractional integral of an integrable and differentiable function f(t) is defined as
where \(\varGamma (\cdot )\) is the Gamma function.
Definition 2
[30] The \(\alpha \)-th (\(\alpha >0\)) order Caputo fractional derivative of an integrable and differentiable function f(t) is introduced as
where m is an integer satisfying \(m-1<\alpha <m\). \(f^{(m)}(\cdot )\) is the m-th derivative of function \(f(\cdot )\).
Remark 1
Riemann–Liouville’s derivative definition and Caputo’s derivative definition are two widely used definitions of fractional calculus. In physical systems, the Caputo definition of fractional calculus is more practical and the Laplace transform of Caputo fractional operators is much easier than that of Riemann–Liouville fractional operators. Hence, the Caputo definition is widely used in the stability analysis of fractional-order systems. The investigation of initial condition of fractional calculus is of great significance in perfecting theory of fractional calculus, and some important works are dedicated to this problem [31, 32]. However, according to the memory character of fractional calculus, the initial point should be \(t_0=-\,\infty \), which is impracticable. For practical system, we can only denote a finite time point \(t_0\) as the initial point of the considered systems. Thus, we just need to guarantee that the history of the system in different tests remains the same before \(t_0\) by the method of stay still or nondestructive preconditioning to reset the initial state at \(t_0\). For this condition, the Caputo definition is still valid for the stability analysis of fractional-order systems. Hence, the Caputo definition of fractional-order systems is considered in this study.
Lemma 1
[33] Assume that \(f:R_f{\rightarrow }R^n\) is piecewise continuous in t, where \(R_f=\{(t,x):0{\le }t{\le }a \hbox { and }\Vert x-x_0 \Vert \le r \}\), \(f=[f_1,f_2,\ldots f_n]\), \(x \in \mathbb {R}^n\), and let \(\Vert f(t,x)\Vert \le \varPsi \hbox { on } R_f\). Then, there exists at least one solution for the system of FDE’s given by
on \(0\le t \le \beta \) where \(\beta =\min (a,(r\varGamma (\alpha +1)/\varPsi )^{1/\alpha })\), \(0<\alpha <1\).
Lemma 2
[33] Consider the initial value problem by Lemma 1 of fractional-order \(\alpha \), \(0<\alpha <1\). Let

and assume that conditions of Lemma 1 hold. Then, a solution of Lemma 1, x(t), is given by
where \(x_*(v)\) is a solution of the integer-order differential equation
Lemma 3
[9] Let x and y be real vectors of the same dimension, we have
2.2 Problem formulation
Consider a fractional-order nonlinear system in the following form
where the fractional-order \(0<\alpha <1\). \(x\in \mathbb {R}^n\), \(u\in \mathbb {R}^q\), \(y\in \mathbb {R}^m\) and \(\theta \in R^p\) are the state, input, output and parameter vector, respectively. \(A\in \mathbb {R}^{n\times n}\), \(b\in \mathbb {R}^{n\times m}\), \(C\in \mathbb {R}^{m\times n}\) are constant system matrices, and \(\varPhi :[\mathbb {R}^n,\mathbb {R}^q]\rightarrow \mathbb {R}^n\), \(f:[\mathbb {R}^n,\mathbb {R}^q]\rightarrow \mathbb {R}^{m \times p}\) are nonlinear functions which are Lipschitz in x with Lipschitz constants \(\gamma _1\) and \(\gamma _2\), respectively, i.e.,
and
for all \(x_1(t) \hbox {,} x_2(t) \in \mathbb {R}^n\).
We assume that the unknown piecewise constant parameter vector \(\theta \) and the distance from nominal parameter vector \(\theta _0\) are both bounded
In this paper, we consider the non-fragile fractional-order adaptive nonlinear observer of the form
where \(\hat{x}(t)\) and \(\hat{\theta }\) are the estimated state and parameter vector, respectively. L is the gain matrix of observer and the term \(\Delta {(t)}\) is the additive perturbation on the gain matrix with the known bound
Let
denote the observation error. The observation error dynamic system is obtained as follows
where
Remark 2
Consider the fractional differential equation
where \(\alpha >0\), m is an integer satisfying \(m-1<\alpha <m\). The fractional-order system can be reformulated as the following equivalent Abel–Volterra equation
For the \(1<\alpha <2\) case, (15) implies that one needs to specify the initial condition \(x^{(k)}_0\) in order to obtain a unique solution of Abel–Volterra equation, which complicates the investigated problem. The stability condition of fractional-order linear time invariant systems for the \(1<\alpha <2\) case is stricter than that for the \(0<\alpha <1\) case. Due to the fact that fractional-order derivative of product function of polynomial is an infinite series, the quadratic Lyapunov function \(V(x)=x^\mathrm{T}Px\), which is effective for integer-order case, is invalid for fractional-order systems. Finding a proper Lyapunov function candidate for fractional-order nonlinear systems is still an open topic. The method proposed in [33] provides an equivalent transformation from FDEs to ODEs, and thus, exact analytic solution can be obtained. It is worth pointing out that the approach in [33] is only suitable for the \(0<\alpha <1\) case. Hence, only the \(0<\alpha <1\) case is investigated in this paper.
3 Main results
This paper focuses on the design of the non-fragile fractional-order nonlinear observer (10). A systematic approach in terms of LMI and two fractional-order adaptive laws are proposed in this section to calculate unknown gain matrix L and to guarantee the nonlinear observer (10) has a stable observation on the unknown parameter vector \(\theta \) and the actual states.
Theorem 1
If there exists a symmetric positive definite matrix \(P\in \mathbb {R}^{n \times n}\), together with three real scalars \(\varepsilon _i>0 , (i=1,2,3)\), and a vector \(S^\mathrm{T}\in \mathbb {R}^{n \times m}\), such that
where
with \(\gamma _1 , \gamma _2 , \gamma _3 \hbox { ,and } \gamma _4\) satisfying (6), (7), (8), and (11), then the observer (10) with the gain matrix \(L=(SP^{-1})^\mathrm{T}\) stabilizes the observation error dynamic system (13) with the following parameter adaptive law
where \(\rho >0\) is a freely chosen design parameter. Moreover, the parameter adaptive law is convergent, \([b f(x(t),u(t)) \theta - b f(\hat{x}(t),u(t)) \hat{\theta }(t) ] \rightarrow 0\) as \(t \rightarrow \infty \).
Proof
For any \(x_1(t),x_2(t) \in \mathbb {R}^n\), we have
Inequality (20) implies that the fractional-order system (5) is Lipschitz in x(t). Hence, the solution of fractional-order system (5) exists and is unique if u(t) is an absolutely continuous input. For the same reason, we can easily conclude that the observer (10) also has a unique solution.
\(F_1(t,e(t),\hat{\theta }(t))\) is a continuous function mapping from \(R_1=\{(t,e):0{\le }t{\le }a \hbox { and }\Vert e-e_0\Vert \le r \}\) to \(\mathbb {R}^n\). There exists a constant \(\varPsi _1>0\) such that \(\Vert F_1(t,e(t),\hat{\theta }(t))\Vert \le \varPsi _1 \hbox { on } \mathbb {R}^n\). According to Lemmas 1 and 2, on \(0{\le }t{\le }\beta _1\), where \(\beta _1=\min (a,(\frac{r}{\varPsi _1}\varGamma (\alpha +1))^{1/\alpha })\), the unique solution of fractional-order error dynamic system (13) is given by
and \(e_*(v)\) is the solution of the following integer-order differential equation
with
Define the Lyapunov function candidate V(v) with a quadratic form weighted by a symmetric positive definite matrix P and a scalar constant \(\rho >0\)
where \({\tilde{\theta }_*}(v) = \theta _*(v) - \hat{\theta }_*(v)\) is the parameter estimation error.
Taking the derivative of (23), it causes
Since \(\varPhi ({x_*}(v),u_*(v))\) is Lipschitz, then applying Lemma 3 to the second term of inequality (24) with real constant scalar \(\varepsilon _1>0\), it yields
\(\square \)
Remark 3
Considering \(e_*(v)\) is a \(n-by-1\) matrix, hence, the eigenvalue of \(e_*^\mathrm{T}(v)*e_*(v)\) is a positive real number. Thus
As a result, Eq. (24) can be reconstructed as
Substituting \(\tilde{\theta }_*(v)=\theta _*(v)-\hat{\theta }_*(v)\) into the fourth term of inequality (26) results in
Applying Lemma 3 on the second and the fourth terms of inequality (27) with real constant scalar \(\varepsilon _2>0\) and \(\varepsilon _3>0\), respectively. Then, we can obtain
It is noted that \(\Vert \theta {(t)}\Vert \le \gamma _3\) and \(\Vert \Delta {(t)}\Vert \le \gamma _4\), which implies that \(\Vert \theta _*{(v)}\Vert \le \gamma _3\) and \(\Vert \Delta _*{(v)}\Vert \le \gamma _4\).
According to the boundedness of \(\Delta _*(v)\), \(\theta _*(v)\), and applying (7) to inequality (28), we can obtain
in which \(\varOmega \) satisfies (18) and \(S=L^\mathrm{T}P\).
Now, we determine the adaptive law of estimated parameter vector \(\theta (t)\) from inequality (29) by setting
In order to satisfy Eq. (30) without knowing the real value of \(\tilde{\theta }_*(v)\), we have
\(F_2(v,e_*(v))\) is a continuous function defined on \(0{\le }v{\le }t^\alpha /\varGamma (\alpha +1)\). Since \(f(\hat{x}_*(v),u_*(v))\) is Lipschitz in \(\hat{x}_*(v)\), \(f(\hat{x}_*(v),u_*(v))\) is bounded and there exists a constant \(\varPsi _2>0\), such that \(\Vert f(\hat{x}_*(v),u_*(v))\Vert <\varPsi _2\).
According to Lemmas 1 and 2, on \(0{\le }v{\le }\beta _2\), where \(\beta _2=\min (\frac{t^\alpha }{\varGamma (\alpha +1)},(\frac{r}{\varPsi _2}\varGamma (\alpha +1))^{(1/\alpha )})\), the unique solution of integer-order system (31) is equivalent to the solution of the following fractional-order system
where \({\tilde{\theta }(t)}=\theta - \hat{\theta }(t)\). Note that \(\theta \) is a piecewise constant, then we have \(D^{\alpha }\theta =0\). Hence, we can obtain that \(D^{\alpha }{\tilde{\theta }(t)}=-\,D^{\alpha }{\hat{\theta }(t)}\). In spite that the actual state x(t) cannot be measured, the restrictive condition \(b^\mathrm{T}P=C\) guarantees that the adaptive law can be constructed through the measured output y(t) and \(\hat{y}(t)\). Therefore, (32) yields the adaptive law (19) to estimate the unknown parameter vector \(\theta \).
With the proposed adaptive law (19), inequality (29) reduces to
According to the direct Lyapunov approach of integer-order systems, the stability conditions of the considered observation error dynamic system (13) are \(V(v)>0\) and \(\dfrac{\mathrm{d}V(v)}{\mathrm{d}v}<0\). Equations (23) and (33) imply that V(v) is positive and \(\dfrac{\mathrm{d}V(v)}{\mathrm{d}v}\) is negative if
According to Schur complement, inequality (34) can be transformed to LMI (16).
Let \(\zeta \) be a positive scalar constant, inequality (34) implies
then, we have
Integrating both side of (36), it follows that
Since \(V(v)\in \mathbb {L}_{\infty }\) and V(0) is finite, this implies that \(e_*(v)\in \mathbb {L}_2\). From the definition of Lyapunov function candidate (23), it follows that \(e_*(v)\in \mathbb {L}_{\infty }\) and \(\tilde{\theta }_*(v)\in \mathbb {L}_{\infty }\). Also, since both \(\varPhi (x(t),u(t)) \hbox { and } f(x(t),u(t))\) are Lipschitz, (22) yields \(\dfrac{\mathrm{d}e_*(v)}{\mathrm{d}v}\in \mathbb {L}_{\infty }\). Thus, \(e_*(v)\in \mathbb {L}_{\infty }\), \(e_*(v)\in \mathbb {L}_2\) and \(\dfrac{\mathrm{d}e_*(v)}{\mathrm{d}v}\in \mathbb {L}_{\infty }\). Therefore, by Barbalat’s lemma [34], \(\lim _{v \rightarrow \infty }e_*(v)=0\).
Moreover,
Remark 4
According to Eq. (38), it is not hard to find that there must be \(v\rightarrow \infty \). From Lemma 1 and the former analysis, one can obtain that the calculations are limited on a finite interval \(t \in [0,\beta ]\) with \(\beta =\min (a,(r\varGamma (\alpha +1)/\varPsi )^{1/\alpha })\), \(0<\alpha <1\), which seems like a contradiction. However, there is no limitation of a and \(\gamma \), which means these variables could be infinite. We hypothesize that a and \(\gamma \) are fairly big numbers. As a result, one can obtain that \(\beta \rightarrow \infty \). Thus, we can get \(v \rightarrow \infty \).
According to (38) and Lipschitz continuity of \(\varPhi \), \(\dfrac{\mathrm{d}e_*(v)}{\mathrm{d}v}\) is uniformly continuous. Consequently, it can be concluded that \(\lim _{v \rightarrow \infty }{\dfrac{\mathrm{d}e_*(v)}{\mathrm{d}v}}=0\) by Barbalat’s lemma [34].
Therefore, considering (22), we have
Since \(\lim _{v \rightarrow \infty }{\hat{x}_*(v)}=x_*(v)\), we then obtain
\(\lim _{v \rightarrow \infty }e_*(v)=0\) causes
since \(0\le v \le t^{\alpha }/\varGamma (\alpha +1)\). (see the proof of Theorem 5 in [33]).
Therefore, according to the equivalent transformation from (31) to (32), we have \([b f(x(t), u(t)) \theta - b f(\hat{x}(t),\)
\(u(t)) \hat{\theta }(t) ] \rightarrow 0\) as \(t \rightarrow \infty \). This ends the proof. \(\square \)
Remark 5
If the fractional-order \(\alpha =1\) and \(\Delta (t)=0\), then the proposed stability condition (16), (17), and the adaptive law (19) are the same as the integer-order case [35]. The equality constraint \(b^\mathrm{T}P=C\) can be eliminated to make the LMI (16) strict by finding a set of matrices \(\{P_i\}\) to form a basis of matrix P such that \(b^\mathrm{T}PC^{\perp }=0\), where \(C^\perp \) is the orthogonal complement of C. However, the YALMIP Toolbox is an efficient tool to deal with the LMIs with equality constraint and non-convex optimization problems. Alternative method is to adopt YALMIP Toolbox as parser and Matlab LMI Toolbox as solver to solve the LMI (16) combined with the restrictive condition (17).
Theorem 2
If there exists a symmetric positive definite matrix \(P\in \mathbb {R}^{n \times n}\), together with three real scalars \(\varepsilon _i>0 , (i=1,2,3)\), and a vector \(S^\mathrm{T}\in \mathbb {R}^{n \times m}\), such that (16) and (17) hold. Then, the observer (10) with the gain matrix \(L=(SP^{-1})^\mathrm{T}\) stabilizes the observation error dynamic system (13) with the following parameter adaptive law
where the positive definite matrix \(Q\in \mathbb {R}^{p \times p}\) is an arbitrary constant matrix. The design parameter \(\sigma \) is selected as
with positive constant scalars M and \(\sigma _0\). Moreover, the parameter adaptive law is convergent, \((b f(x(t),u(t)) \theta - b f(\hat{x}(t),u(t)) \hat{\theta } ) \rightarrow 0\) as \(t \rightarrow \infty \).
Proof
According to the equivalent integer-order observation error dynamic system (22), we define the Lyapunov candidate with a quadratic form weighted by two symmetric positive definite matrices \(P>0 \hbox {, and }Q>0\)
Taking the derivative of (43) and dealing with the terms with uncertainties similar to Proof of Theorem 1, we can obtain
\(F_3(t,e(t),\hat{\theta }(t))\) is a continuous function mapping from \(R_3=\{(t,e):0{\le }t{\le }a \hbox { and }\Vert e-e_0\le r\Vert \}\) to \(\mathbb {R}^p\). There exists a constant \(\varPsi _3>0\) such that \(\Vert F_3(t,e(t),\hat{\theta }(t))\Vert \le \varPsi _3 \hbox { on } \mathbb {R}^p\). According to Lemmas 1 and 2, on \(0{\le }t{\le }\beta _3\), where \(\beta _3=\min (a,(\frac{r}{\varPsi _3}\varGamma (\alpha +1))^{1/\alpha })\), the unique solution of fractional-order system (41) is given by
Since \(\theta \) is a piecewise constant, thus, \(\dfrac{\mathrm{d}\hat{\theta }_*(v)}{\mathrm{d}v} = -\dfrac{\mathrm{d}\tilde{\theta }_*(v)}{\mathrm{d}v}\). Using this fact, and substituting (45) in (44) yields
Considering the boundedness properties of unknown parameter vector \(\theta \), it follows from (46) that
For \(\Vert \hat{\theta }_*(v)-\theta _0\Vert <M\), we have \(\sigma =0\) and \(N_0=0\).
For \(M\le \Vert \hat{\theta }_*(v)-\theta _0\Vert \le 2M\), we have
For \(\Vert \hat{\theta }_*(v)-\theta _0\Vert >2M\), we have \(N_0 \le -\,2\sigma _0 M\Vert \hat{\theta }_*(v)\) \(-\,\theta _0\Vert \le 0\). Therefore, according to the selection of \(\sigma \), \(N_0\) is non-positive, which implies that
Substituting inequality (48) in (46) yields inequality (33). Similar to Proof of Theorem 1, we can conclude that the observation error dynamic system (13) is asymptotically stable, and the proposed fractional-order adaptive law (41) is convergent if (16) and (17) hold. This ends the proof. \(\square \)
Remark 6
Different from (30) in Proof of Theorem 1, the second term in the adaptive law (41) is added as modification which guarantee the derivative of the Lyapunov function candidate remains negative. In Sect. 4, both numerical examples show the proposed adaptive law (41) provides better estimation performance than adaptive law (19).
Moreover, according to (40), the convergence \(\lim _{v \rightarrow \infty }\) \({\hat{x}_*(v)}=x_*(v)\) guarantees \(\lim _{v \rightarrow \infty }bf(x_*(v),u_*(v))\tilde{\theta }_*(v)\) \(=0\). Therefore, with the proposed adaptive law (19) and (41), the estimated parameter \(\hat{\theta }(t)\) converges to the true value of unknown parameter \(\theta \), if the following persistent excitation condition holds
where \(\varsigma _1\), \(\varsigma _2\), \(\delta >0\).
4 Numerical example
4.1 Example A
In this section, we consider the following fractional-order nonlinear system with an absolutely continuous input as \(u(t) = 3\cos (t)\) to illustrate the effectiveness of the developed methods
The true value of unknown parameter \(\theta = 2\). Moreover, an additive perturbation on observer gain L from time \(t=5s\) as \(\Delta (t) = \begin{bmatrix} \sin (5t)&\cos (5t)&2\cos (t) \end{bmatrix}^\mathrm{T}\) is also considered. It is easy to compute that parameters can be chosen as \(\gamma _1=0.5\), \(\gamma _2=1.5\), \(\gamma _3=2\), and \(\Vert \Delta (t)\Vert \le \gamma _4=2.5\) is considered as an additive uncertainty in the output feedback channel.
Using YALMIP Toolbox as parser [36] and Matlab LMI Toolbox as solver, a feasible solution of inequality (16) with equality constrain (17) can be obtained as follows
Hence, the observer gain is obtained as \(L=(SP^{-1})^\mathrm{T}=\begin{bmatrix} 5.1426&11.2857&1.7885 \end{bmatrix}^\mathrm{T}\). Then, we can use the obtained gain L to design the following observer
According to Theorems 1 and 2, two fractional-order adaptive laws can be obtained as follows
and
with \(\sigma \) satisfying (42), in which the design parameters are selected as \(\rho =Q=0.05, \theta _0=1, \sigma _0=5, M{=}1\).
The initial condition of the fractional-order system (50) and observer (51) are chosen as \(x_0=\begin{bmatrix} -3&3&-2 \end{bmatrix}^\mathrm{T}\) and \(\hat{x}_0=\begin{bmatrix} 0&0&0\end{bmatrix}^\mathrm{T}\), and the initial parameter estimation is \(\hat{\theta }(0)=0.5\). Assume that the value of unknown parameter \(\theta \) abruptly changes to \(\theta =1\) from \(t=10\) s.

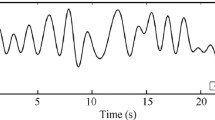
Actual and estimated values of the state variables
In Fig. 1, the solid lines and dash lines represent the actual states and estimated states, respectively. Figure 1 shows that the proposed observer works well and the state variables of observer (51) are convergent to the state variables of system (50). The observation errors are illustrated in Fig. 2, which shows that the observation error dynamic system is asymptotically stable and the observation errors are convergent to zeros. In Figs. 3 and 4, the value of the estimated parameter \(\hat{\theta }(t)\) converges to the actual values despite the abrupt changes on unknown parameter \(\theta \) at \(t=10s\), which shows that the proposed two fractional-order adaptive laws are effective and validate. The dashed lines in Figs. 3 and 4 illustrate that the adaptive law (53) provides better estimated performance on the unknown parameter \(\theta \) than the adaptive law (52) with smaller estimation error and faster estimation time.

Observation errors on the actual states

Estimation on the unknown parameter \(\theta \) with \(t\in [0,5]\)

Estimation on the unknown parameter \(\theta \) with \(t\in [10,20]\)
4.2 Example B
In this section, we consider the following fractional-order nonlinear system with 2 unknown parameters to illustrate the effectiveness of the developed methods
The absolutely continuous input is selected as \(u(t) = \frac{\sin (0.5t)}{2}\) and the unknown parameter \(\theta =\begin{bmatrix}\theta _1\\\theta _2 \end{bmatrix}=\begin{bmatrix}2\\1 \end{bmatrix}\). Denote the additive perturbation on observer gain L from time \(t=5s\) is \(\Delta (t)=[\sin (5t) \quad 2\cos (t)]\). The design parameters are chosen as \(\gamma _1=0.3,\gamma _2=1.2,\gamma _3=1.1180,\gamma _4=1.38\).
Using YALMIP Toolbox as parser and Matlab LMI Toolbox as solver, a feasible solution of inequality (16) is obtained as following under the equality constrain \(b^\mathrm{T}P=C\),
Thus, the observer gain is obtained as \(L=(SP^{-1})^\mathrm{T}\)
\(=[ 8.4188 \quad 3.4348 ]^\mathrm{T}\).
According to Theorems 1 and 2, we can use the obtained gain L to design the nonlinear observer in the form of Eq. (10) with the following fractional-order adaption law
and
where \(\sigma \) is satisfied constrain (42). The design parameters are selected as \(\rho = Q =0.05; \theta _0=[\theta _{10} \quad \theta _{20}]^\mathrm{T}=[1 \quad 0.5]^\mathrm{T},\sigma _0=8,M=1.2207\).
The initial conditions of the fractional-order system (54) are chosen as \(x_0=[-3\quad 3]^\mathrm{T}\) and \(\hat{x_0}=[0\quad 0]^\mathrm{T}\). The initial parameter estimation is \(\hat{\theta _0}=[\hat{\theta _{10}} \quad \hat{\theta _{20}}]^\mathrm{T}=\)
\([1.2 \quad 0.3]^\mathrm{T}\). Assume that the value of unknown parameter \(\theta \) abruptly changes to \(\theta =[\theta _1 \quad \theta _2]^\mathrm{T}=[1\quad 1.5]^\mathrm{T}\) from \(t = 10s\).

Actual and estimated values of the state variables

Estimation on the unknown parameters \(\theta _1\) and \(\theta _2\)
In Fig. 5, the solid lines represent the actual states and the dash lines stand for the estimated states. Figure 5 illustrates the satisfactory state tracing performance of the proposed method. Figure 6 shows the estimated parameters \(\theta _1\) and \(\theta _2\) utilizing the different methods (55) and (56), respectively. From \(t=10s\), the value of unknown parameters \(\theta _1, \theta _2\) changed from \([\theta _1 \quad \theta _2]=[2 \quad 1]^\mathrm{T}\) to \([\theta _1 \quad \theta _2]=[1 \quad 1.5]^\mathrm{T}\). The values of the estimated parameters \(\hat{\theta _1}\) and \(\hat{\theta _2}\) converge to the actual values despite the abrupt changes, which also show the effectiveness of the proposed method.
5 Conclusion
In this paper, we have investigated the fractional-order adaptive observer design problem for a class of fractional-order Lipschitz nonlinear systems containing unknown parameters. According to the solution equivalent property between the fractional differential equations and ordinary differential equations, the integer-order Lyapunov approach was adopted to study the asymptotical stability of fractional-order nonlinear systems. The sufficient conditions in terms of LMI to guarantee the convergence property of the error dynamic systems were then presented. The adaptive states observer along with two types of adaptive law was proposed to estimate the actual states and unknown parameters simultaneously. Two numerical examples finally illustrated the effectiveness of the proposed approach. Our future research includes the fractional order-dependent sufficient conditions on the asymptotic stability and fractional-order \(1<\alpha <2\) case.
References
Sierociuk, D., Skovranek, T., Macias, M., Podlubny, I., Petras, I., Dzielinski, A., Ziubinski, P.: Diffusion process modeling by using fractional-order models. Appl. Math. Comput. 257, 2–11 (2015)
Li, L., Zhang, Q.C.: Nonlinear dynamic analysis of electrically actuated viscoelastic bistable microbeam system. Nonlinear Dyn. 87(1), 587–604 (2017)
Martynyuk, V., Ortigueira, M.: Fractional model of an electrochemical capacitor. Sig. Process. 107, 355–360 (2015)
Chen, K., Tang, R., Li, C.: Phase-constrained fractional order PI\(^\lambda \) controller for second-order-plus dead time systems. Trans. Inst. Meas. Control 39(8), 1225–1235 (2017)
Das, S., Saha, S., Das, S., Gupta, A.: On the selection of tuning methodology of FOPID controllers for the control of higher order processes. ISA Trans. 50(3), 376–388 (2011)
Luo, Y., Chen, Y.: Stabilizing and robust fractional order pi controller synthesis for first order plus time delay systems. Automatica 48(9), 2159–2167 (2012)
Yeroğlu, C., Ateş, A.: A stochastic multi-parameters divergence method for online auto-tuning of fractional order pid controllers. J. Frankl. Inst. 351(5), 2411–2429 (2014)
Lu, J., Chen, Y.: Robust stability and stabilization of fractional-order interval systems with the fractional order: the case \(0<\alpha <1\). IEEE Trans. Autom. Control 55(1), 152–158 (2010)
Lu, J., Chen, G.: Robust stability and stabilization of fractional-order interval systems: an LMI approach. IEEE Trans. Autom. Control 54(6), 1294–1299 (2009)
Li, C., Wang, J.: Robust stability and stabilization of fractional order interval systems with coupling relationships: the \(0<\alpha <1\) case. J. Frankl. Inst. 349(7), 2406–2419 (2012)
Lu, J., Ma, Y., Chen, W.: Maximal perturbation bounds for robust stabilizability of fractional-order systems with norm bounded perturbations. J. Frankl. Inst. 350(10), 3365–3383 (2013)
Lin, J.: Robust resilient controllers synthesis for uncertain fractional-order large-scale interconnected system. J. Frankl. Inst. 351(3), 1630–1643 (2014)
Li, Y., Chen, Y., Podlubny, I.: Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 45(8), 1965–1969 (2009)
Yu, J., Hu, H., Zhou, S., Lin, X.: Generalized Mittag–Leffler stability of multi-variables fractional order nonlinear systems. Automatica 49(6), 1798–1803 (2013)
Boroujeni, E.A., Momeni, H.R.: Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Sig. Process. 92(10), 2365–2370 (2012)
Li, C., Wang, J., Lu, J., Ge, Y.: Observer-based stabilisation of a class of fractional order non-linear systems for \(0<\alpha <2\) case. IET Control Theory Appl. 8(13), 1238–1246 (2014)
Zhang, R., Tian, G., Yang, S., Cao, H.: Stability analysis of a class of fractional order nonlinear systems with order lying in (0, 2). ISA Trans. 56, 102–110 (2015)
Balasubramaniam, P., Muthukumar, P., Ratnavelu, K.: Theoretical and practical applications of fuzzy fractional integral sliding mode control for fractional-order dynamical system. Nonlinear Dyn. 80(1–2), 249–267 (2015)
Chen, Y., Wei, Y., Zhong, H., Wang, Y.: Sliding mode control with a second-order switching law for a class of nonlinear fractional order systems. Nonlinear Dyn. 85(1), 633–643 (2016)
Chen, Y., Wei, Y., Zhou, X., Wang, Y.: Stability for nonlinear fractional order systems: an indirect approach. Nonlinear Dyn. 89(2), 1011–1018 (2017)
Keel, L., Bhattacharyya, S.P.: Robust, fragile, or optimal? IEEE Trans. Autom. Control 42(8), 1098–1105 (1997)
Sabatier, J., Farges, C., Merveillaut, M., Feneteau, L.: On observability and pseudo state estimation of fractional order systems. Eur. J. Control 18(3), 260–271 (2012)
NDoye, I., Darouach, M., Voos, H., Zasadzinski, M.: Design of unknown input fractional-order observers for fractional-order systems. Int. J. Appl. Math. Comput. Sci. 23(3), 491–500 (2013)
Rapaic, M.R., Pisano, A.: Variable-order fractional operators for adaptive order and parameter estimation. IEEE Trans. Autom. Control 59(3), 798–803 (2014)
Lan, Y.H., Zhou, Y.: Non-fragile observer-based robust control for a class of fractional-order nonlinear systems. Syst. Control Lett. 62(12), 1143–1150 (2013)
Lan, Y.H., Wang, L.L., Ding, L., Zhou, Y.: Full-order and reduced-order observer design for a class of fractional-order nonlinear systems. Asian J. Control 18(4), 1467–1477 (2016)
Kong, S., Saif, M., Liu, B.: Observer design for a class of nonlinear fractional-order systems with unknown input. J. Frankl. Inst. 354(13), 5503–5518 (2017)
Chen, K., Lu, J., Li, C.: The ellipsoidal invariant set of fractional order systems subject to actuator saturation: the convex combination form. IEEE/CAA J. Autom. Sin. 3(3), 311–319 (2016)
Liu, S., Wu, X., Zhou, X.F., Jiang, W.: Asymptotical stability of Riemann–Liouville fractional nonlinear systems. Nonlinear Dyn. 86(1), 65–71 (2016)
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications. Academic press, Cambridge (1998)
Sabatier, J., Farges, C., Trigeassou, J.C.: Fractional systems state space description: some wrong ideas and proposed solutions. J. Vib. Control 20(7), 1076–1084 (2014)
Machado, J.A.T., Baleanu, D., Chen, W., Sabatier, J.: New trends in fractional dynamics. J. Vib. Control 20(7), 963 (2014)
Demirci, E., Ozalp, N.: A method for solving differential equations of fractional order. J. Comput. Appl. Math. 236(11), 2754–2762 (2012)
Krstic, M., Kanellakopoulos, I., Kokotovic, P.V.: Nonlinear and Adaptive Control Design. Wiley, Hoboken (1995)
Cho, Y.M., Rajamani, R.: A systematic approach to adaptive observer synthesis for nonlinear systems. IEEE Trans. Autom. Control 42(4), 534–537 (1997)
Lofberg, J.: Yalmip: a toolbox for modeling and optimization in matlab. In: IEEE International Symposium on Computer Aided Control Systems Design, pp. 284–289. Taipei (2004)
Acknowledgements
The authors would like to thanks all the anonymous reviewers for their valuable suggestions and insightful comments on this manuscript. This work was supported by Science Startup Foundation of Hainan University (No. KYQD(ZR)1872), Natural Science Foundation of Hainan Province (No. 20156218), Natural science Foundation of China (No. 31460318) and the Innovative Project of Post-graduate of Hainan Province (No. Hys2016-27).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, K., Tang, R., Li, C. et al. Robust adaptive fractional-order observer for a class of fractional-order nonlinear systems with unknown parameters. Nonlinear Dyn 94, 415–427 (2018). https://doi.org/10.1007/s11071-018-4368-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4368-x