
Abstract
This paper studies the fractional-order disturbance observer (FODO)-based adaptive sliding mode synchronization control for a class of fractional-order chaotic systems with unknown bounded disturbances. To handle unknown disturbances, the nonlinear FODO is explored for the fractional-order chaotic system. By choosing the appropriate control gain parameter, the disturbance observer can approximate the disturbance well. On the basis of the sliding mode control technique, a simple sliding mode surface is defined. A synchronization control scheme incorporating the introduced sliding mode surface and the designed disturbance observer is then developed. Under the control of the synchronization scheme, a good synchronization performance is realized between two identical fractional-order chaotic systems with different initial conditions. Finally, the numerical simulation results illustrate the effectiveness of the developed synchronization control scheme for fractional-order chaotic systems in the presence of external disturbances.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the past decades, fractional calculus has attracted increasing concerns of researchers, which has been widely applied in the fields of engineering and physics, such as system control [1], electromechanics [2] and signal processing [3]. So far, integer-order nonlinear systems have been studied extensively [4–7]. Since the mathematical model of a real plant can be accurately described via the fractional-order differential method [8, 9], many systems can be expressed as fractional differential equations, for example fractional-order economic system [10], fractional-order biological population model [11], fractional-order financial system [12] and fractional-order chaotic and hyperchaotic systems [13–19]. Recently, the synchronization of fractional-order chaotic systems has been extensively investigated because of the potential applications in electrical engineering and secure communication. Therefore, it is significant to develop the synchronization control of fractional-order chaotic systems based on fractional calculus.
The chaotic synchronization is that the synchronization errors asymptotically approach zero for the trajectories of drive system and response system. Since the synchronization was firstly realized between two identical chaotic systems by Pecora and Carroll [20, 21], the chaotic synchronization has been developed quickly and many synchronization control schemes for fractional-order chaotic systems have been proposed including impulsive control [22], active control [23], adaptive control [24], generalized projective control [25] and passive control [26]. In addition, it is well known that sliding mode control is an effective robust control scheme and the sliding mode control scheme has the features of fast global convergence and high robustness to external disturbances [27]. In recent years, sliding mode control has been investigated for linear and nonlinear systems [28–31] and many important results have been reported for the synchronization of fractional-order chaotic systems by using the sliding mode control strategy. In [32, 33], from the stability theory of fractional-order systems and active sliding mode control method, the synchronization was achieved for two fractional-order chaotic systems. The sliding mode synchronization control was realized for uncertain fractional-order Duffing–Holmes systems in [34]. In [35], the stabilization and synchronization were investigated for a class of chaotic fractional-order systems via a novel fractional-order sliding mode method. A robust fractional-order sliding mode scheme was proposed, and the synchronization was realized for uncertain fractional-order chaotic systems in [36]. In [37], a new three-dimensional fractional-order chaotic system was presented and its adaptive sliding mode synchronization was studied. The synchronization was studied for a class of fractional-order arbitrary dimensional hyperchaotic systems based on the sliding mode control method in [38]. The above-mentioned works focused on synchronization of fractional-order chaotic systems via sliding mode control approach. In practice, many real physical systems are subjected to exogenous disturbance and the disturbance may lead to oscillations and even increase instability of systems; it is significant to investigate the synchronization of fractional-order chaotic systems with external disturbance. According to the conclusion above, the bounded assumption for fractional derivative of disturbances was introduced [34]. In [36, 38], unknown disturbances in fractional-order systems were tackled by adaptive estimation method. However, the nonlinear FODO has rarely been considered in synchronization control of fractional-order chaotic systems in the literature.
Since the nonlinear disturbance observer can approximate unknown disturbance well, it can be employed to restrain the interference of external disturbance. In the past decades, many design techniques of integer-order disturbance observer have been reported. In [39], a disturbance observer-based control was proposed for nonlinear systems with disturbances. The nonlinear disturbance observer was developed for robot manipulators in [40]. In [41], an adaptive fuzzy tracking control scheme was explored based on disturbance observer for multi-input and multi-output nonlinear systems. By using the terminal sliding mode technique, a disturbance observer-based adaptive sliding mode control scheme was proposed for near-space vehicles (NSV) in [42]. In [43], a Nussbaum disturbance observer was designed for NSV. On the basis of the terminal sliding mode technique and the disturbance observer method, an anti-disturbance control scheme was presented for NSV in [44]. With such experience of the applications of disturbance observers, it is necessary to design nonlinear FODO to compensate for the effects caused by unknown disturbances.
Inspired by the above discussions, we develop a synchronization control scheme to synchronize fractional-order chaotic systems with unknown external disturbances based on a designed nonlinear FODO and a simple sliding mode surface. To illustrate the effectiveness of the given synchronization control method, a modified fractional-order Jerk system is analyzed by using the proposed synchronization control scheme.
The organization of the paper is as follows. Section 2 details the problem formulation. The nonlinear FODO is designed in Sect. 3. The sliding mode surface is constructed, and the sliding mode synchronization controller is proposed based on the developed nonlinear FODO in Sect. 4. A modified fractional-order Jerk system is presented, and the effectiveness of the proposed synchronization control method is demonstrated via numerical simulation in Sect. 5, followed by some concluding remarks in Sect. 6.
2 Problem statement and preliminaries
Fractional calculus is an extension to integer-order calculus. Several existing definitions of fractional derivatives are given in [45], where the Caputo definition is used in engineering applications extensively. We firstly introduce the following Caputo definition.
Definition 1
[45] For the function g(t), the Caputo fractional derivative of fractional-order \(\alpha \) is defined as follows:
where \(m - 1 < \alpha < m\), \(m = [\alpha ] + 1\), \([\alpha ]\) denotes the integer part of \(\alpha \), and the \({\varGamma } ( \cdot )\) is gamma function, which is defined as \({\varGamma } (m - \alpha ) = \int _0^\infty {{t^{m - \alpha - 1}}{e^{ - t}}} \hbox {d}t\). The main advantage of (1) is that Caputo derivative of a constant is equal to zero. In this paper, the fractional-order chaotic systems will be described by using Caputo definition with lower limit of integral \({t_0} = 0\) and the order \(0 < \alpha < 1\).
Definition 2
[46] The Mittag–Leffler function with two parameters is defined as
where \({\alpha _1} > 0\), \({\alpha _2} > 0\), z stands for set of complex numbers.
On the basis of the Caputo definition of fractional derivative, the fractional-order chaotic system will be introduced.
Consider the following fractional-order chaotic system as the drive system:
where \(A \in {R^{n \times n}}\) denotes a constant matrix, \(x(t) = {({x_1}(t),{x_2}(t), \ldots , {x_n}(t))^T} \in {R^n}\) is a state vector, \(f(x(t)) = {({f_1}(x(t)),{f_2}(x(t)), \ldots ,{f_n}(x(t)))^T} \in {R^n}\) is the nonlinear function vector.
The response system is defined as follows:
where \(y(t) = {({y_1}(t),{y_2}(t), \ldots , {y_n}(t))^T} \in {R^n}\) is the state vector, \(f(y(t)) = ({f_1}(y(t)),{f_2}(y(t)),\ldots , {f_n}(y(t)))^T \in {R^n}\) is the nonlinear function vector, \(d(t)\; = \;({d_1}(t),{d_1}(t),\ldots ,{d_n}(t))^T \in {R^n}\) is the unknown bounded disturbance, and \(u(t) = {({u_1}(t),{u_1}(t), \ldots , {u_n}(t))^T} \in {R^n}\) is the control input.
This paper aims at developing a FODO-based adaptive sliding mode synchronization control scheme, so that the synchronization is realized between two identical fractional-order chaotic systems in the presence of external unknown disturbances. On the basis of the designed sliding mode controller, the response system can well synchronize the drive system under the proper condition. In order to obtain the main results, the following lemmas, properties and assumption are introduced.
Lemma 1
[47] Let \(\chi (t) \in \mathfrak {R}\) be a continuous and derivable function. Then, for any time instant \(t \ge {t_0}\), we have
where \(0 < \alpha < 1\).
Lemma 2
[48] Consider the following fractional-order system
then there exists a constant \(t_1>0\) such that for all \(t \in ({t_1},\infty )\), we have
where q(t) is the state variable and \(b_0\) and \(b_1\) are two positive constants.
Property 1
[49] If \({g_1}\) is a constant and the order \({\beta _2} > 0\), the Caputo fractional derivative satisfies the following condition:
Property 2
[49] The Caputo fractional derivative satisfies the following linear characteristic:
where \({g_2}(t)\) and \({g_3}(t)\) are functions and \({a_1}\) and \({a_2}\) are constants.
Assumption 1
For the external disturbance \(d_i(t)\) with \(i = 1,2, \ldots ,n\), the Caputo fractional derivative of \(d_i(t)\) is bounded, that is \(\left| {{D^\alpha }{d_i}(t)} \right| \le {\zeta _i}\) and \({\zeta _i}>0\) is an unknown positive constant.
3 Design of fractional-order disturbance observer
In this section, a nonlinear FODO will be designed to approximate the external disturbance in the response system (4). Without loss of generality, according to the response system (4), we have
where \({\theta _i}\) is ith element of Ay(t), \({y_i}(t)\) is the ith element of y(t), \({f_i}(y(t))\) is the ith element of f(y(t)), \(u_i(t)\) is the ith element of u(t), \({d_i}(t)\) is the ith element of d(t) and \(i = 1,2, \ldots ,n\).
Since d(t) in (4) is unknown, d(t) cannot be applied to developing synchronization control for the drive system (3) and the response system (4). To overcome the above problem, a fractional-order nonlinear disturbance observer is designed to estimate disturbance.
To design the nonlinear FODO, an auxiliary variable is introduced based on the design technique of integer-order disturbance observer as follows [41]:
where \({\sigma _i}>0\) is a constant to be determined.
Combining (10) and (11), the Caputo fractional derivative of \({\phi _i}(t)\) can be written as
To obtain the disturbance estimate, the estimate of intermediate variable \({\phi _i}(t)\) is described as
where \({{\hat{\phi }}_i}\) is the estimate of \( \phi _i\).
According to (11), the disturbance \(d_i(t)\) can be estimated as
Define \({{\tilde{d}}_i}(t) = {d_i}(t) - {{\hat{d}}_i}(t)\). Considering (11) and (14), we have
Considering (12) and (13), the Caputo fractional derivative of \({{\tilde{\phi }}_i}(t)\) can be written as
On the basis of the above discussions, in order to analyze the convergence of disturbance estimate error \({{\tilde{d}}_i}(t)\), a Lyapunov function candidate can be chosen as
Invoking (17) and Lemma 1, the Caputo fractional derivative of \(V_d\) is described as
Substituting (16) into (18), we obtain
According to (19) and Assumption 1, we have
where \({B_0} = 2{\sigma _i} - 1\) and \({B_1} = \frac{1}{2}\zeta _i^2\). To ensure the estimated error is bounded, the nonlinear FODO control gain \({\sigma _i}\) should be chosen to make \({\sigma _i}>0.5\). The conclusion that the signals \(\tilde{\phi }_i (t)\) and \(\tilde{d}_i (t)\) are bounded can be drawn from (20) and Lemma 2.
On the basis of Lemma 2 and (20), we obtain
which means
According to (22), the disturbance estimation error \({{\tilde{d}}_i}\) is upper bounded. For the external disturbance \(d_i(t)\) with \(i = 1,2, \ldots ,n\), the disturbance approximation error \({{\tilde{d}}_i}(t) = {d_i}(t) - {{\hat{d}}_i}(t)\) satisfies \(\left| {{{\tilde{d}}_i}(t)} \right| \le {\kappa _i}\) and \({\kappa _i}>0\) is an unknown positive constant. In actual application, the upper bound of \(\left| {{{\tilde{d}}_i}(t)} \right| \) is difficult to determine; therefore, the estimated value \({{\hat{\kappa }}_i}\) of \({\kappa _i} \) is introduced, where \(i = 1,2, \ldots ,n\).
The above design procedure of nonlinear FODO can be summarized in the following theorem:
Theorem 1
Consider the response system (4) and the nonlinear FODO is designed as (13) and (14). The disturbance estimate error of the proposed nonlinear FODO is bounded.
On the basis of the above-mentioned analyses, Theorem 1 can be easily proven.
4 Synchronization control of fractional-order chaotic systems
In this section, the nonlinear FODO-based adaptive sliding mode control scheme will be proposed to guarantee the trajectories of drive system (3) and response system (4) which are ultimately bounded synchronization. To design the synchronization control scheme, we firstly define error state \(e(t) = y(t) - x(t)(e(t) = ({e_1}(t),{e_2}(t), \ldots , {e_n}(t))^T \in {R^n})\). From (3) and (4), the corresponding synchronization error system is as follows:
To investigate the stabilization of fractional-order synchronization error system (23), a simple sliding mode surface is defined as
where \(i = 1,2, \ldots ,n\)
From (24), we have
where \({A_i}\) denotes the ith line of A and \(f_i(x(t))\) denotes the \(i\hbox {th}\) element of f(x(t)).
Using the adaptive sliding control approach, the desired synchronization control input is designed as
where \(\hbox {sign}(\cdot )\) is the sign function and \({\eta _i}>0\) is a design constant. Meanwhile, the estimated value \({{\hat{\kappa }}_i}\) is updated by
where \({\gamma _i} > 0\) is a design constant.
If the synchronization control scheme is designed as (26) for fractional-order synchronization error system (23), the sliding mode surface satisfies that the sliding mode surface \({s_i}(t)\) is bounded stable in the form of
where \(a>0\) is a unknown constant.
From (24) and (28), one obtains
According to the above discussion, if the sliding surface \({s_i}(t) \) is bounded, then the synchronization error \({e_i}(t)\) is also bounded. Therefore, the nonlinear FODO-based adaptive sliding mode synchronization control scheme for fractional-order chaotic systems with unknown disturbances can be summarized in the following theorem and will be proved by using fractional-order Lyapunov method.
Theorem 2
For the synchronization error system (23) with \(0 < \alpha <1\), the sliding mode surface is designed according to (24). The external unknown bounded disturbance is estimated by using the designed nonlinear FODO (13) and (14). Then, the synchronization error e(t) is ultimately bounded stable under the adaptive sliding control scheme (26) and (27).
Proof
To analyze the convergence of synchronization error e(t), we consider the Lyapunov candidate function as
According to Property 2 and (30), we have
where \({{\tilde{\kappa }}_i} = {{\hat{\kappa }}_i} - {\kappa _i}\).
From Lemma 1, (31) can be written as
Based on Property 2, (32) is equivalent to
On the basis of (25), one has
Referring to Property 1 and \({{\tilde{\kappa }}_i} = {{\hat{\kappa }}_i} - {\kappa _i}\), we obtain
According to (27) and (35), we have
Invoking (36), we obtain
Substituting (26) into (37) yields
Furthermore, (38) can be rewritten as
with
According to (40), it yields
Considering (20) and (41), we have
where \({B_2} = \min (2{\eta _i},1,2{\sigma _i} - 1)\) and \({B_3} = \sum \limits _{i = 1}^n {\frac{1}{2}\zeta _i^2} + \sum \limits _{i = 1}^n {\frac{1}{2}\kappa _i^2} \).
To ensure the synchronization error is bounded, the corresponding design parameters \({\eta _i}\) and \({\sigma _i}\) should be chosen to make \({\eta _i}>0\) and \({\sigma _i}>0.5\). According to (42) and Lemma 2, it may directly show that the signals s(t), e(t) and \({{\tilde{d}}_i}(t)\) are ultimately bounded. From Lemma 2 and (42), we obtain
which implies
From the inequality (44), the synchronization error e(t) and s(t) will be ultimately bounded as \(t \rightarrow \infty \). Therefore, the synchronization error system (23) is bounded stable based on Lemma 2. The bounded synchronization of drive system (3) and response system (4) is achieved. This concludes the proof.\(\square \)
Remark 1
Since the response system (4) is with the unknown time-varying disturbance, the nonlinear FODO is employed to estimate the disturbance in this paper. To develop the disturbance observer, Assumption 1 is introduced. This assumption means that the Caputo derivative of the disturbance is bounded. If the Caputo derivative of the disturbance is unbounded, the estimation performance of nonlinear FODO could be poor. Thus, Assumption 1 is necessary for the disturbance.
Remark 2
As for the proposed nonlinear FODO, we can see that the estimated error with suitable transient performance can be obtained by appropriately adjusting design parameter \({\sigma _i}\). For example, the approximation error could be decreased by increasing the value of \({\sigma _i}\). Therefore, appropriate parameter should be chosen based on the performance of whole systems.
5 Simulation example
5.1 Modified fractional-order Jerk system
In [50], a new chaotic generator was investigated by constructing a three-segment piecewise-linear odd function with variable break point. From the differential equation of chaotic generator in [50], the modified fractional-order Jerk system is given as follows:
where the parameters \({\varepsilon _1} = 1.5\), \({\varepsilon _2} = 0.35\) and \({f_3}(x(t))\) is a piecewise-linear function defined by
where \({\vartheta _0} < - 1 < {\vartheta _1} < 0\) and \({\vartheta _0}=-2.5,\,{\vartheta _1}=-0.5\).
According to the system (45) and the piecewise-linear function (46), the three equilibrium points of the modified fractional-order Jerk system are given in Table 1. The Jacobian matrix for system (45) can be written as
On the basis of Table 1, the corresponding eigenvalues for equilibrium point \({Q_ 0 }\) are \({\lambda _1} = 0.6228\) and \({\lambda _{2,3}} = - 0.4864 \pm 1.1701j\). And, for equilibrium points \({Q_ + }\) and \({Q_ - }\), the eigenvalues are \({\lambda _1} = -0.7614\) and \({\lambda _{2,3}}= 0.2057 \pm 1.1274j\). When the fractional-order \(\alpha = 0.98\) is chosen, we obtain the following characteristic equation of the equilibrium points \({Q_ + }\) and \({Q_ - }\):
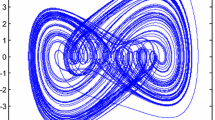
with unstable \({\lambda _{1,2}}= 1.0013 \pm 0.0142j\), and \(\left| {\arg ({\lambda _{1,2}})} \right| = 0.0142 < {\pi / {2\vartheta }} = 0.0157\), in which \(\vartheta = 100\) (\(\vartheta \) is the lowest common multiple of fractional-order denominator). Thus, the modified fractional-order Jerk system (45) with chaotic dynamic behaviors is based on the theorem in [51]. When the initial values are chosen as \({(1,1,1)^T}\) and the fractional-order \(\alpha =0.98\), the fractional-order modified Jerk system exhibits chaotic behaviors as shown in Fig. 1.

Chaotic behaviors of modified fractional-order Jerk system. a \({x_1}(t) - {x_2}(t)\) plane, b \({x_1}(t) - {x_3}(t)\) plane, c \({x_2}(t) - {x_3}(t)\) plane, d \({x_3}(t) - {x_1}(t) - {x_2}(t)\) space
5.2 Numerical simulation of synchronization control
In this section, to illustrate the effectiveness of the proposed synchronization controller, the synchronization of modified fractional-order Jerk system (45) is investigated. Consider the fractional-order chaotic system (45) as drive system. From (4), the response system is defined as follows:
where \({d_1}(t)\), \({d_2}(t)\) and \({d_3}(t)\) are unknown bounded disturbances. \({u_1}(t)\), \({u_2}(t)\) and \({u_3}(t)\) are designed synchronization control inputs. \({f_3}(y(t))\) is defined as
According to (45) and (49), the synchronization error system can be written as

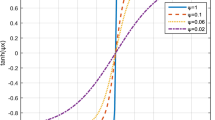
Comparison result of \({2^{0.98}}\cos (2t + \frac{{0.98\pi }}{2})\) and \({D^\alpha }\cos (2t)\)

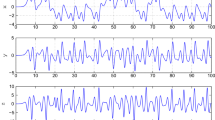
Synchronization control results of modified fractional-order Jerk system. a Synchronization state of \({x_1}(t)\) and \({y_1}(t)\), b synchronization state of \({x_2}(t)\) and \({y_2}(t)\), c synchronization state of \({x_3}(t)\) and \({y_3}(t)\), d synchronization error \({e_1}(t)\), \({e_2}(t)\) and \({e_3}(t)\)

Disturbance observer results. a \(d_1(t)\) and \(\hat{d}_1(t)\), b \(d_2(t)\) and \(\hat{d}_2(t)\), c \(d_3(t)\) and \(\hat{d}_3(t)\), d observation errors \({\tilde{d}_1}(t)\), \({\tilde{d}_2}(t)\) and \({\tilde{d}_3}(t)\)
Referring to the designed controller (26), the synchronization controller can be written as
Substituting (52) into (51), we have
where \({D^\alpha }{{\hat{\kappa }}_i} = {\gamma _i}(\left| {{s_i}(t)} \right| - {{\hat{\kappa }}_i})\) with \({\gamma _i} > 0\) and \(i=1,2,3\).
To demonstrate the effectiveness of the proposed nonlinear FODO-based adaptive sliding mode synchronization control scheme, the numerical simulation results are presented for the modified fractional-order Jerk system under the following conditions: the initial conditions \({x_0}(t) = {(1,1,1)^T}\), \({y_0}(t) = (1.2,0.6,0.5)^T\), \({{\hat{\kappa }}_0} = {(0.1,0.1,0.1)^T}\) and \(\hat{\phi }_0(t)= {(0.1,0.1,0.1)^T}\), and the designed parameters are chosen as \(\alpha = 0.98\), \({\sigma _1}={\sigma _2}={\sigma _3}=50\), \({\gamma _1} = {\gamma _2} = {\gamma _3} = 0.1\) and \({\eta _1}={\eta _2}={\eta _3}=50\). The disturbance is assumed as \({d_1}(t) = \cos (2t)\), \({d_2}(t) = \cos (2t)\) and \({d_3}(t) = \cos (2t)\). On the basis of the result in [52], we have \({\rho _1}{D^\alpha }\cos ({\rho _2}t) = {\rho _1}\frac{1}{2}{(j{\rho _2})^m}{t^{m - \alpha }}({E_{1,m - \alpha + 1}}(j{\rho _2}t) + {( - 1)^n}{E_{1,m - \alpha + 1}}( - j{\rho _2}t))\) with j denotes the unit of imaginary part with \({\rho _1}\) and \({\rho _2}\) which are arbitrary numbers. In this paper, the parameter \(m=1\) and the fractional-order \(\alpha =0.98\). Thus, \({\rho _1}\rho _2^\alpha \cos ({\rho _2}t + \frac{{\pi \alpha }}{2})\) can be used to approximate \({\rho _1}{D^\alpha }\cos ({\rho _2}t)\). The comparison result is shown in Fig. 2 for the case of \({\rho _1}=1\) and \({\rho _2}=2\). According to Fig. 2, Assumption 1 is satisfied.
The numerical results are shown in Figs. 3 and 4 under the proposed nonlinear FODO-based adaptive sliding mode control scheme. The state synchronization results of drive system (45) and response system (49) are given in Fig. 3a–c. It is shown that good synchronization performance is achieved. Figure 3d shows the synchronization errors \({e_1}(t)\), \({e_2}(t)\) and \({e_3}(t)\) are convergent. Furthermore, the observation performance of the proposed FODO (13) and (14) is presented in Fig. 4. It is evident in Fig. 4 that the observer is effective and feasible. According to the simulation results, the drive system (45) and the response system (49) are bounded synchronization under the designed sliding mode controller (26) and the adaptive update law (27). Therefore, the proposed nonlinear FODO-based adaptive sliding mode synchronization control scheme is valid for fractional-order chaotic systems with external disturbance.
6 Conclusion
In this paper, the nonlinear FODO-based adaptive sliding mode synchronization control scheme has been studied for fractional-order chaotic systems in the presence of external disturbance. A nonlinear FODO has been developed to approximate the unknown disturbances. A sliding mode synchronization controller has been designed based on the nonlinear FODO for synchronization of fractional-order chaotic systems. Furthermore, an example is given in the present paper, i.e., the synchronization between two modified fractional-order Jerk systems. The numerical simulations show the effectiveness of the proposed nonlinear FODO-based adaptive sliding mode synchronization control scheme.
References
Podlubny, I.: Fractional-order systems and \({PI^\lambda }{D^\mu }\)-controllers. IEEE Trans. Autom. Control 44, 208–214 (1999)
Moghadasianx, M., Betin, F., Yazidi, A., Capolino, G.A., Kianinezhad, R.: Position control of six-phase induction machine using fractional-order controller. International Conference on Electrical Machines (ICEM), Marseille, France, pp. 1048–1054 (2012)
Das, S., Pan, I.: Fractional Order Signal Processing: Introductory Concepts and Applications. Springer, New York (2012)
Zhang, D., Yu, L.: Exponential state estimation for Markovian jumping neural networks with time-varying discrete and distributed delays. Neural Netw. 35, 103–111 (2012)
Zhang, D., Yu, L., Wang, Q.G., Ong, C.J.: Estimator design for discrete-time switched neural networks with asynchronous switching and time-varying delay. IEEE Trans. Neural Netw. Learn. Syst. 23, 827–834 (2012)
Zhang, D., Yu, L.: Passivity analysis for discrete-time switched neural networks with various activation functions and mixed time delays. Nonlinear Dyn. 67, 403–411 (2012)
Zhang, D., Yu, L.: Passivity analysis for stochastic Markovian switching genetic regulatory networks with time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 16, 2985–2992 (2011)
Shokooh, A., Suáez, L.: A comparison of numerical methods applied to a fractional model of damping materials. J. Vib. Control 5, 331–354 (1999)
West, B., Bologna, M., Grigolini, P.: Physics of Fractal Operators. Springer, New York (2003)
Dadras, S., Momeni, H.R.: Control of a fractional-order economical system via sliding mode. Phys. A Stat. Mech. Appl. 389, 2434–2442 (2010)
El-Sayed, A.M.A., Rida, S.Z., Arafa, A.A.M.: Exact solutions of fractional-order biological population model. Commun. Theor. Phys. 52, 992–996 (2009)
Chen, W.C.: Nonlinear dynamics and chaos in a fractional-order financial system. Chaos Solitons Fractals 36, 1305–1314 (2008)
Lu, J.G.: Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 354, 305–311 (2006)
Wang, X.Y., Wang, M.J.: Dynamic analysis of the fractional-order Liu system and its synchronization. Chaos Interdiscip. J. Nonlinear Sci. 17, 033106 (2007)
Liu, L., Liu, C.X., Zhang, Y.B.: Experimental verification of a four-dimensional Chua’s system and its fractional order chaotic attractors. Int. J. Bifurc. Chaos 19, 2473–2486 (2009)
Wang, X.Y., Song, J.M.: Synchronization of the fractional order hyperchaos Lorenz systems with activation feedback control. Commun. Nonlinear Sci. Numer. Simul. 14, 3351–3357 (2009)
Min, F.H., Yu, Y., Ge, C.J.: Circuit implementation and tracking control of the fractional-order hyper-chaotic Lü system. Acta Phys. Sin. 58, 1456–1461 (2009)
Liu, L., Liang, D.L., Liu, C.X.: Nonlinear state-observer control for projective synchronization of a fractional-order hyperchaotic system. Nonlinear Dyn. 69, 1929–1939 (2012)
Liu, L., Liu, C.X.: Theoretical analysis and circuit verification for fractional-order chaotic behavior in a new hyperchaotic system. Math. Probl. Eng. 2014, 682408 (2014)
Pecora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64, 821–824 (1990)
Carroll, T.L., Pecora, L.M.: Synchronizing chaotic circuits. IEEE Trans. Circuits Syst. 38, 453–456 (1991)
Xi, H.L., Yu, S.M., Zhang, R.X., Xu, L.: Adaptive impulsive synchronization for a class of fractional-order chaotic and hyperchaotic systems. Optik Int. J. Light Electron Opt. 125, 2036–2040 (2014)
Bhalekar, S., Daftardar-Gejji, V.: Synchronization of different fractional order chaotic systems using active control. Commun. Nonlinear Sci. Numer. Simul. 15, 3536–3546 (2010)
Yang, L.X., Jiang, J.: Adaptive synchronization of drive-response fractional-order complex dynamical networks with uncertain parameters. Commun. Nonlinear Sci. Numer. Simul. 19, 1496–1506 (2014)
Peng, G.J., Jiang, Y.L., Chen, F.: Generalized projective synchronization of fractional order chaotic systems. Phys. A Stat. Mech. Appl. 387, 3738–3746 (2008)
Wu, C.J., Zhang, Y.B., Yang, N.N.: The synchronization of a fractional order hyperchaotic system based on passive control. Chin. Phys. B 20, 060505 (2011)
Šabanovic, A.: Variable structure systems with sliding modes in motion control—a survey. IEEE Trans. Ind. Inform. 7, 212–223 (2011)
Shi, P., Xia, Y.Q., Liu, G.P., Rees, D.: On designing of sliding-mode control for stochastic jump systems. IEEE Trans. Autom. Control 51, 97–103 (2006)
Zhang, J.H., Shi, P., Xia, Y.Q.: Robust adaptive sliding-mode control for fuzzy systems with mismatched uncertainties. IEEE Trans. Fuzzy Syst. 18, 700–711 (2010)
Jiang, B., Shi, P., Mao, Z.H.: Sliding mode observer-based fault estimation for nonlinear networked control systems. Circuits Syst. Signal Process. 30, 1–16 (2011)
Gao, Z.F., Jiang, B., Shi, P., Qian, M.S., Lin, J.X.: Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique. J. Frankl. Inst. 349, 1543–1560 (2012)
Tavazoei, M.S., Haeri, M.: Synchronization of chaotic fractional-order systems via active sliding mode controller. Phys. A Stat. Mech. Appl. 387, 57–70 (2008)
Wang, B., Zhou, Y.G., Xue, J.Y., Zhu, D.L.: Active sliding mode for synchronization of a wide class of four-dimensional fractional-order chaotic systems. ISRN Appl. Math. 2014, 472371 (2014)
Hosseinnia, S.H., Ghaderi, R., Ranjbar, A.N., Mahmoudian, M., Momani, S.: Sliding mode synchronization of an uncertain fractional order chaotic system. Comput. Math. Appl. 59, 1637–1643 (2010)
Aghababa, M.P.: Robust stabilization and synchronization of a class of fractional-order chaotic systems via a novel fractional sliding mode controller. Commun. Nonlinear Sci. Numer. Simul. 17, 2670–2681 (2012)
Zhang, L.G., Yan, Y.: Robust synchronization of two different uncertain fractional-order chaotic systems via adaptive sliding mode control. Nonlinear Dyn. 76, 1761–1767 (2014)
Li, C.L., Su, K.L., Wu, L.: Adaptive sliding mode control for synchronization of a fractional-order chaotic system. J. Comput. Nonlinear Dyn. 8, 031005 (2013)
Liu, L., Ding, W., Liu, C.X., Ji, H.G., Cao, C.Q.: Hyperchaos synchronization of fractional-order arbitrary dimensional dynamical systems via modified sliding mode control. Nonlinear Dyn. 76, 2059–2071 (2014)
Chen, W.H.: Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 9, 706–710 (2004)
Chen, W.H., Ballance, D.J., Gawthrop, P.J., O’Reilly, J.: A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 47, 932–938 (2000)
Chen, M., Chen, W.H., Wu, Q.X.: Adaptive fuzzy tracking control for a class of uncertain MIMO nonlinear systems using disturbance observer. Sci. China Inf. Sci. 57, 012207 (2014)
Chen, M., Yu, J.: Disturbance observer-based adaptive sliding mode control for near-space vehicles. Nonlinear Dyn. (2015). doi:10.1007/s11071-015-2268-x
Chen, M., Yu, J.: Adaptive dynamic surface control of nsvs with input saturation using a disturbance observer. Chin. J. Aeronaut. 28, 853–864 (2015)
Chen, M., Ren, B.B., Wu, Q.X., Jiang, C.S.: Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci. China Inf. Sci. 58, 070202 (2015)
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Application of Fractional Differential Equations. Elsevier, New York (2006)
Aguila-Camacho, N., Duarte-Mermoud, M.A., Gallegos, J.A.: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19, 2951–2957 (2014)
Li, L., Sun, Y.G.: Adaptive fuzzy control for nonlinear fractional-order uncertain systems with unknown uncertainties and external disturbance. Entropy 17, 5580–5592 (2015)
Li, C.P., Deng, W.H.: Remarks on fractional derivatives. Appl. Math. Comput. 187, 777–784 (2007)
Yu, S.M.: A new type of chaotic generator. Acta Phys. Sin. 53, 4111–4119 (2004)
Petráš, I.: Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation. Higher Education Press, Beijing (2011)
Ishteva, M.: Properties and applications of the Caputo fractional operator. Msc. Thesis, Department of Mathematics, Universität Karlsruhe (TH), Sofia, Bulgaria, (2005)
Acknowledgments
This research is supported by National Natural Science Foundation of China (No. 61573184), Jiangsu Natural Science Foundation of China (No. SBK20130033), Program for New Century Excellent Talents in University of China (No. NCET-11-0830) and Specialized Research Fund for the Doctoral Program of Higher Education (No. 20133218110013).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Shao, S., Chen, M. & Yan, X. Adaptive sliding mode synchronization for a class of fractional-order chaotic systems with disturbance. Nonlinear Dyn 83, 1855–1866 (2016). https://doi.org/10.1007/s11071-015-2450-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2450-1