
Abstract
In this paper, the synchronization of multi-order fractional neural networks (MoFNNs) with time-varying delays is investigated. Two kinds of controls, namely continuous control and quantized control, are introduced respectively to implement the synchronization. Moreover, by virtue of vector Lyapunov functions, sufficient criteria for realizing the synchronization of the MoFNNs with time-varying delays are deduced. The results of this paper cover the synchronization of traditional fractional neural networks with identical derivative order as a special case. Finally, a numerical example with two cases is given to verify the theoretical results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Fractional systems are characterized by that each state described by a differential equation in systems is allowed to have an non-integer order. It has been found that fractional systems are fit for simulating many physical systems with memory hysteresis and diffusion dynamics [1,2,3], and can be successfully used in all kinds of fields on engineering and science such as viscous-elastic material, electronic device, colored noise, and so forth [4,5,6,7,8,9]. To this end, fractional systems have been received increasing attention in the past few years.
In some scenarios, the fractional systems may be with multi-order, which means that each differential equation of state has its own derivative order which may differ from the others. Compared with fractional systems with the identical order, multi-order fractional systems are more flexible in terms of order and may be more accurate in portraying some phenomena. Consequently, the attention of dynamic behavior analysis towards multi-order fractional systems has increased in recent years [10,11,12,13,14,15]. In [10], underpinning the theory of positive system, the asymptotic stability on multi-order fractional time-varying delayed system was addressed. In [13], the global boundedness of solution and asymptotic stability for nonlinear multi-order fractional systems were investigated. In [14], by proposing a multi-order comparison principle, the issue of asymptotic stability on the multi-order fractional system was discussed in detail.
Fractional neural networks are typical fractional systems. It has been substantiated that fractional neural networks with different dynamical behaviors can be successfully utilized in many applications [7,8,9, 16,17,18]. In particular, fractional neural networks with synchronization can effectively depict a number of physical phenomena and can be utilized in communication science, associative memory, combinational optimization, etc [19,20,21,22,23]. In view of this, plenty of efforts have been dedicated to investigate the synchronization on various fractional neural networks in current years [24,25,26,27,28,29,30]. For instance, the synchronization of fractional neural networks with unbounded time-varying delays was discussed in [26]. Some interesting results concerning the synchronization of fractional recurrent neural networks are presented in [27]. The cluster synchronization for fractional time delayed neural networks in finite-time sense and asymptotic sense were reported in [28]. Note that the current works about the synchronization of fractional neural networks are with identical derivative order.
In view that multi-order fractional neural networks are valuable generalizations of fractional neural networks with identical derivative order, they have widespread application potentials. However, in comparison with numerous results for the dynamic characteristics of fractional neural networks with identical derivative order, there are few works on the dynamical behavior analysis of multi-order fractional neural networks. Just in [15], the global stabilization for multi-order fractional neural networks based on memristor with multiple time-varying delays was reported. As far as authors know, there has been no report concerning the synchronization of multi-order fractional neural networks, in spite of their widespread application potentials.
In addition, the existence of time delays is ineluctability in designing neural networks owing to large-scale networks and limited channels of information transmission between neurons [31, 32]. In some scenarios, the time delays actually may be changed with regard to time and even unbounded. In the existing research results of multi-order fractional systems, the networks considered are with no delays or bounded time delays [10,11,12,13,14]. This stimulates us to discuss the synchronization of multi-order fractional systems with time-varying delays, wherein the delays considered are not assumed to be bounded.
Inspired by the above discussions, the synchronization of MoFNNs with time-varying delays is investigated in this paper. The main contributions of this paper include the following aspects: Firstly, by virtue of an inequality for multi-order fractional systems with time-varying delays, a vector Lyapunov function is introduced to investigate the synchronization of MoFNNs with time-varying delays. Secondly, in addition to the continuous control, a quantized control is introduced to realize the synchronization of MoFNNs, which effectively reduces the transmission pressure in the control. Finally, the systems investigated in this paper are of multiple order, which can be viewed as extensions of fractional systems investigated in [24,25,26,27,28,29,30]. And the criteria herein are also applicable to the synchronization of fractional systems with identical derivative order.
The remaining part of this paper is outlined as follows: Several definitions and lemmas about fractional calculus are introduced and the model description of MoFNNs is provided in Sect. 2. Sufficient criteria are deduced to guarantee the realization of synchronization on MoFNNs with time-varying delays in Sect. 3. Moreover, an example for verifying the validity and correctness of the results is given in Sect. 4. Finally, the conclusion is made in Sect. 5.
Notation: \(\mathbb {R}^{n\times n}\) and \(\mathbb {R}^{n}\) respectively represent the sets of \(n\times n\)-dimensional real matrices and n-dimensional real column vectors. \(B>0\) \((\in \mathbb {R}^{n\times n})\) signifies that B is positive definite. For \(z=(z_1,\cdots ,z_n)^{T}\in \mathbb {R}^{n}\), \(z>0\) \((<0)\) means that \(z_{i}>0\) \((<0)\) for \(i=1,2,\cdots ,n\). \(\mathbb {N}\) is the set of integers.
2 Preliminaries
In this section, several definitions and lemmas for the fractional calculus are introduced. Moreover, the model description of MoFNNs with time-varying delays is provided.
2.1 Definitions and Lemmas of Fractional Calculus
Definition 1
[33] The fractional integral of a vector function \(h(t)=(h_1(t),\cdots ,h_n(t))^T\) is denoted by \(D^{-\beta }_{t_{0}+}h(t)=(D^{-\beta _1}_{t_{0}+}h_1(t),\cdots ,D^{-\beta _n}_{t_{0}+}h_n(t))^T\), where
\(\beta =(\beta _1,\cdots ,\beta _n)^T\) with \(\beta _i>0\) for \(i=1,2,\cdots ,n\), \(\Gamma (z)=\int ^{\infty }_{0} \iota ^{z-1}e^{-\iota }d\iota \).
Definition 2
[33] The Caputo fractional derivative of a vector function \(h_i(t)\) is denoted by \(^{C}D^{\beta }_{t_{0}+}h(t)=(^{C}D^{\beta _1}_{t_{0}+}h_1(t),\cdots ,^{C}D^{\beta _n}_{t_{0}+}h_n(t))^T\), where
\(\beta =(\beta _1,\cdots ,\beta _n)^T\) with \(\beta _i\in (0, 1)\) for \(i=1,2,\cdots ,n\), \(\dot{h}_i(\iota )\) stands for the first-order derivative of \(h_i(\iota )\).
Lemma 1
[34] The fractional calculus of a continuously differentiable function \(z(t)\in \mathbb {R}\) obeys the following derivative rule:
where \(\bar{\beta }\in (0, 1)\) is a constant.
Definition 3
A matrix is called Metlzer matrix if its non-diagonal elements are non-negative; a matrix is called nonnegative matrix if its elements are non-negative; a matrix is Hurwitz matrix if all the eigenvalues have negative real parts.
The following lemma refers to the comparison principle for multi-order fractional time-varying delayed systems.
Lemma 2
[15] Assume that there exists a Metlzer matrix \(\beth \in \mathbb {R}^{n\times n}\) and a nonnegative matrix \(\daleth \in \mathbb {R}^{n\times n}\) such that the nonnegative vector \(y(t)=(y_{1}(t), \cdots , y_{n}(t))^{T}\in \mathbb {R}^{n}\) satisfies:
where \(\beta =(\beta _1,\cdots ,\beta _n)^T\) with \(\beta _i\in (0, 1]\) for \(i=1,2,\cdots ,n\) and \(^{C}D^{\beta }_{t_{0}+}y(t)=(^{C}D^{\beta _1}_{t_{0}+}y_1(t),\cdots ,{^{C}D^{\beta _n}_{t_{0}+}y_n(t)})^T\); \(\tau (t)=(\tau _1(t),\cdots ,\tau _n(t))^T\) \((\in \mathbb {R}^{n})\) stands for the term of time delays which satisfies \(\tau _i(t)\le t+\vartheta \) (\(\vartheta >0\)) and \(\lim _{t\rightarrow +\infty }t-\tau _i(t)=+\infty \) for \(i=1,2,\cdots ,n\). If \(\beth +\daleth \) is a Hurwitz matrix, one has \(\lim _{t\rightarrow +\infty }y(t)=0\).
2.2 Model Description
Consider a multi-order fractional system consisting of N MoFNNs with time-varying delays, and the i-th MoFNN is introduced by
where \(\beta =(\beta _{1},\cdots , \beta _{n})^{T}\) with \(\beta _{i}\in (0,1)\) (\(i=1,2,\cdots ,n\)) represents the multi-order vector; \(x_{i}(t)=(x_{i1}(t), \cdots , x_{in}(t))^{T}\in \mathbb {R}^{n}\) stands for the state vector and \(^{C}D^{\beta }_{t_{0}+}x_{i}(t)=({^{C}D^{\beta _{1}}_{t_{0}+}x_{i1}(t)},\cdots ,{^{C}D^{\beta _{n}}_{t_{0}+}x_{in}(t)})^{T}\); \(h(x_{i})=(h_{1}(x_{i1}), \cdots , h_{n}(x_{in}))^{T}: \mathbb {R}^{n}\rightarrow \mathbb {R}^{n}\) stands for the activation function vector, which is continuously differentiable; \(\tau (t)=(\tau _{1}(t), \cdots , \tau _{n}(t))^{T}\) is the vector of time delays, which satisfies \(\tau _i(t)\le t+\vartheta \) (\(\vartheta >0\)) and \(\lim _{t\rightarrow +\infty }t-\tau _i(t)=+\infty \) for \(i=1,2,\cdots ,n\); constant c \(>0\) represents the coupling strength; \(A=\text {diag}(a_{1},\cdots ,a_{n})>0\) is the self-feedback matrix; \(B=(b_{pq})_{n\times n}\in \mathbb {R}^{n\times n}\) and \(F=(f_{pq})_{n\times n}\in \mathbb {R}^{n\times n}\) signify the connection and delayed connection weight matrices respectively; \(g_{ij}\) stand for the elements of coupling configuration matrix \(G=(g_{ij})_{N\times N}\) and obey the following rule: \(g_{ij}>0\) when there exist directed links from node j to i \((i\ne j)\), or else, \(g_{ij}=0\), and \(g_{ii}=-\sum _{j=1, j\ne i}^{N}g_{ij}\) \((i=1,2,\cdots ,N)\); \(\Gamma =\text {diag}(\gamma _{1},\cdots ,\gamma _{n})>0\) and \(E\in \mathbb {R}^{n}\) represents the inner coupling matrix and external input vector respectively. \(u_{i}(t)=(u_{i1}(t), \cdots , u_{in}(t))^T\in \mathbb {R}^n\) stands for the feedback control.
Remark 1
Due to the combination of the characteristics of fractional calculus and neural networks, fractional neural networks have been widely applied in many fields, such as system identification [8, 9], associative memory [7, 18, 19], secure communication [22], parameter estimation [23], and so forth. Particularly, as valuable generalizations for traditional fractional neural networks and with greater flexibility in fractional differential order, it is foreseeable that the MoFNNs will have a wide range of applications.
Let \(C([t_{0}-\vartheta , t_{0}], \mathbb {R}^{n})\) be the set of continuous function mapping \([t_{0}-\vartheta , t_{0}]\rightarrow \mathbb {R}^{n}\). The initial condition of MoFNN (1) has the form of
where \(\phi _i\in C([t_{0}-\vartheta , t_{0}], \mathbb {R}^{n})\).
In addition, the desired state of the multi-order fractional system is denoted by s(t), which satisfies
where \(^{C}D^{\beta }_{t_{0}+}s(t)=({^{C}D^{\beta _{1}}_{t_{0}+}s_{1}(t)},\cdots ,{^{C}D^{\beta _{n}}_{t_{0}+}s_{n}(t)})^{T}\), and s(t) could be viewed as a cycle orbit, an equilibrium point or even a chaos. The main objective in the following is to devise suitable controls \(u_i(t)\) so that the solutions in (1) could be synchronized with desired state s(t) in (2) as \(t\rightarrow +\infty \), i.e., \(\lim _{t\rightarrow +\infty }\Vert x_{i}(t)-s(t)\Vert =0\) for \(i=1,2,\cdots ,N\).
A necessary assumption is provided as follows:
Assumption 1
There exists positive constant \(w_{p}\) such that
3 Main Results
In this section, the continuous control and quantized control are introduced respectively for achieving the synchronization of MoFNNs.
Without loss of generality, assume that the first \(l\in \mathbb {N}\) \((1\le l\le N)\) MoFNNs are picked to be pinned. Denote node 0 as a virtual node and \(d_{i}\) \((\ge 0)\) as the link weight from node 0 to i \((i=1, 2,\cdots , N)\), which meets that \(d_{i}>0\) for \(1\le i\le l\), otherwise, \(d_{i}=0\). Correspondingly, a graph \(\mathcal {G}\) is gained by combining original graph G, virtual node 0 along with the links from it to the first l nodes. The assumption on the graph \(\mathcal {G}\) is as follows:
Assumption 2
\(\mathcal {G}\) contains a direct spanning tree.
From Assumption 2, the following lemma is given.
Lemma 3
[35] Under Assumption 2, there exists a diagonal matrix \(\Omega =\text {diag}(\omega _{1},, \cdots , \omega _{N})\) \((>0)\) such that
where \(L=(l_{ij})_{N\times N}\) is the Laplacian matrix of graph G, whose elements satisfy \(l_{ij}=-g_{ij}\) \((i,j=1,2,\cdots ,N)\); \(D=\text {diag}(d_1, \cdots , d_{N})\); \(\kappa =\lambda _{\min }((L+D)^{T}\Omega +\Omega (L+D))/\lambda _{\max }(\Omega )\) is a positive constant.
Denoting \(e_{i}(t)=x_{i}(t)-s(t)=(x_{i1}(t)-s_{1}(t),\cdots ,x_{in}(t)-s_{n}(t))^{T}\) as the error vector, the following error equation is obtained,
where \(\bar{h}(e_{i}(t))=h(x_{i}(t))-h(s(t))\) and \(\bar{h}(e_{i}(t-\tau (t)))=h(x_{i}(t-\tau (t)))-h(s(t-\tau (t)))\).
Due to the existence of different differential orders in the MoFNNs, it is not feasible to analyze the errors by using methods provided in [28, 29, 36, 37], which analyzes the error of each network as a whole. Instead, for i-th \((i=1,2,\cdots ,N)\) MoFNN, the error function of p-th \((p=1, 2,\cdots , n)\) neuron is introduced as follows:
3.1 The Synchronization of MoFNNs with Time-varying Delays Under a Continuous Control
Introduce a continuous control as follows:
where constant \(d_{i}\) stands for the feedback gain with \(d_{i}>0\) if \(1\le i\le l\), otherwise, \(d_{i}=0\).
Denote \(\beth =-\text {diag}(2a_{1}-2n+c\kappa \gamma _{1}, 2a_{2}-2n+c\kappa \gamma _{2}, \cdots , 2a_{n}-2n+c\kappa \gamma _{n})+(b_{pq}^{2}w_{q}^{2})_{n\times n}\) and \(\daleth =(f_{pq}^{2}w_{q}^{2})_{n\times n}\), where \(\kappa =\lambda _{\min }((L+D)^{T}\Omega +\Omega (L+D))/\lambda _{\max }(\Omega )>0\) and \(D=\text {diag}(\overbrace{d_{1}, \cdots , d_{l}}^{l}, \overbrace{0, \cdots , 0}^{N-l})\). It can be observed that \(\beth \) is a Metlzer matrix and \(\daleth \) is nonnegative. Then, the following theorem about the synchronization of MoFNNs with time-varying delays under continuous control (7) is obtained.
Theorem 1
Under Assumptions 1 and 2, the synchronization of MoFNNs (1) can be realized via continuous control (7) if \(\beth +\daleth \) is a Hurwitz matrix.
Proof
Consider a vector Lyapunov function \(V(t)=(V_{1}(t), \cdots , V_{n}(t))^{T}\), and
where \(\epsilon _{p}(t)=(e_{1p}(t), \cdots , e_{Np}(t))^{T}\), \(\Omega \) is defined in Lemma 3.
With Assumption 1, one arrives at
Similarly,
Moreover, it follows from Lemma 3 that
Combining the above inequalities yields to
According to the definitions of \(\beth \) and \(\daleth \),
where \(^{C}D_{t_{0}+}^{\beta }V(t)=(^{C}D_{t_{0}+}^{\beta _{1}}V_{1}(t),\cdots ,{^{C}D_{t_{0}+}^{\beta _{n}}}V_{n}(t))\). Since \(\beth +\daleth \) is a Hurwitz matrix, from Lemma 2, one arrives at \(\lim _{t\rightarrow +\infty }V(t)=0\), implying \(\lim _{t\rightarrow +\infty }\epsilon _{p}(t)=0\) for all \(p=1,2,\cdots ,n\). As a consequence, the synchronization of MoFNNs (1) is achieved via continuous control (7). \(\square \)
Remark 2
The vector Lyapunov function introduced in this paper can be seen as an extension of the scalar Lyapunov function in terms of dimensionality. In view of this, the vector Lyapunov function may be more advantageous than the scalar Lyapunov function in analyzing the dynamical behaviors of systems in certain situations. In [28, 29, 36, 37], the scalar Lyapunov function is utilized to investigate the dynamic behaviors of fractional systems with identical derivative order. Due to that the fractional systems of this paper are with different derivative orders, the scalar Lyapunov function cannot be directly utilized herein, and the vector Lyapunov function is introduced in Theorem 1 analyze the synchronization of MoFNNs.
Especially, if \(\beta _i\equiv \beta _0\) \((0<\beta _0<1)\) for \(i=1,2,\cdots ,n\), the MoFNN (1) and error system (5) can be respectively rewritten as
and
where \(^{C}D^{\beta _0}_{t_{0}+}x_{i}(t)=(^{C}D^{\beta _0}_{t_{0}+}x_{i1}(t),\cdots ,{^{C}D^{\beta _0}_{t_{0}+}x_{in}(t)})^T\).
One can see that Theorem 1 still holds for \(\beta _i\equiv \beta _0\) \((i=1,2,\cdots ,n)\). That is, by virtue of vector Lyapunov function (8), the following corollary about the synchronization on fractional neural networks (9) with identical derivative order can be obtained.
Corollary 1
Under Assumptions 1 and 2, the synchronization of fractional neural networks (9) with identical derivative order can be realized via continuous control (7) if \(\beth +\daleth \) is a Hurwitz matrix, where matrices \(\beth \) and \(\daleth \) are the same as defined above.
It should be noted that if the scalar Lyapunov function is used to investigate the synchronization of fractional neural networks (9) with identical derivative order, a corollary with another form of synchronization criteria is obtained.
Corollary 2
Under Assumptions 1 and 2, the synchronization of fractional neural networks (9) with identical derivative order can be realized via continuous control (7) if the following inequality can be satisfied
where \(\mu _1\) and \(\mu _2\) are positive constants with \(\mu _1>\mu _2>\max _{1\le p\le n}\{w_{p}\}\), \(\kappa \) is defined in Lemma 3, and \(W=\text {diag}(w_{1}^{2}, \cdots , w_{n}^{2})\).
Proof
Consider a scalar Lyapunov function as
where \(\Omega \) is as defined in Lemma 3, and \(\tilde{\epsilon }(t)=(e_{1}^{T}(t), \cdots , e_{N}^{T}(t))^{T}\). In light of error system (6) and the analysis in [26], one can get
where \(M=\mu _1BB^{T}+W/\mu _1+\mu _1I_{n}+\mu _2FF^{T}-2A\). According to (11) and the definition of \(\mu _2\), one has
which follows from the results in [26] that \(\lim _{t\rightarrow +\infty }\tilde{V}(t)=0\), implying that \(\lim _{t\rightarrow +\infty }||\tilde{\epsilon }(t)||=0\). Hence, the synchronization of fractional neural networks (9) with identical derivative order can be realized via continuous control (7). \(\square \)
Remark 3
Compared with the results about the synchronization of fractional systems in [27,28,29,30], where the fractional systems are with identical derivative order, the synchronization of multi-order fractional systems is discussed in Theorem 1. What is more, as a special case, the synchronization of fractional time-varying delayed neural networks with identical derivative order is considered in Corollary 2. In view of this, the obtained results in Theorem 1 are more general.
3.2 The Synchronization of MoFNNs with Time-varying Delays Under a Quantized Control
Consider the following function:
where \(\xi (\cdot ):\mathbb {R}\rightarrow \mathcal {Q}\) signifies the quantizer and \(\mathcal {Q}=\{\pm \chi _i: \chi _i=\varrho ^i\chi _0, i=0,\pm 1,\pm 2,\cdots ,\}\cup \{0\}\) with \(\chi _0>0\); \(\theta =\frac{1-\varrho }{1+\varrho }\) with \(0<\varrho <1\). According to the analysis of [40], there exists a Filippov solution \(\delta \in [-\theta ,\theta )\) satisfying \( \xi (\iota )=(1+\delta )\iota \).
Based on (13), introduce the following quantized control:
where \(d_i\) as defined in control (7), and \(\bar{\xi }(e_i(t))=(\xi (e_{i1}(t)),\cdots ,\xi (e_{in}(t)))^T\).
Denote \(\tilde{\beth }=-\text {diag}(2a_{1}-2n+c\tilde{\kappa }\gamma _{1}, 2a_{2}-2n+c\tilde{\kappa }\gamma _{2}, \cdots , 2a_{n}-2n+c\tilde{\kappa }\gamma _{n})+(b_{pq}^{2}w_{q}^{2})_{n\times n}\) and \(\daleth =(f_{pq}^{2}w_{q}^{2})_{n\times n}\), where \(\tilde{\kappa }=\lambda _{\min }((L+\tilde{D})^{T}\Omega +\Omega (L+\tilde{D}))/\lambda _{\max }(\Omega )>0\) and \(\tilde{D}=(1-\theta )\text {diag}(\overbrace{d_{1}, \cdots , d_{l}}^{l}, \overbrace{0, \cdots , 0}^{N-l})\). It can be observed that \(\tilde{\beth }\) is a Metlzer matrix and \(\daleth \) is nonnegative. The following theorem about the synchronization on MoFNNs with time-varying delays under quantized control (14) is obtained.
Theorem 2
Under Assumptions 1 and 2, the synchronization of MoFNNs (1) can be realized via quantized control (14) if \(\tilde{\beth }+\daleth \) is a Hurwitz matrix.
Proof
It follows from the vector Lyapunov function (8) and Lemma 1 that
Similar to the proofs in Theorem 1, one arrives at
and
Moreover, it follows from Lemma 3 that
Combining the above inequalities yields to
Hence, one obtains
where \(^{C}D_{t_{0}+}^{\beta }V(t)=(^{C}D_{t_{0}+}^{\beta _{1}}V_{1}(t),\cdots ,{^{C}D_{t_{0}+}^{\beta _{n}}}V_{n}(t))\). As \(\tilde{\beth }+\daleth \) is a Hurwitz matrix, in virtue of Lemma 2, we have \(\lim _{t\rightarrow +\infty }V(t)=0\), implying that \(\lim _{t\rightarrow +\infty }\epsilon _{p}(t)=0\) for \(p=1,2,\cdots ,n\). Therefore, the synchronization of MoFNNs (1) can be achieved via quantized control (14). \(\square \)
Remark 4
In Theorem 1, the continuous control is proposed to investigate the synchronization on MoFNNs with time-varying delays. In contrast in Theorem 2, the quantized control is proposed to realize the synchronization of MoFNNs with time-varying, which can reduce the transmission pressure effectively.
Similar to Corollaries 1 and 2, the following two corollaries about the synchronization of fractional neural networks (9) with identical derivative order under quantized control (14) are presented.
Corollary 3
Under Assumptions 1 and 2, the synchronization of fractional neural networks (9) with identical derivative order can be realized via quantized control (14) if \(\tilde{\beth }+\daleth \) is a Hurwitz matrix.
Corollary 4
Under Assumptions 1 and 2, the synchronization of fractional neural networks (9) with identical derivative order can be realized via quantized control (14) if the following inequality can be satisfied
where \(\mu _1\) and \(\mu _2\) are positive constants with \(\mu _1>\mu _2>\max _{1\le p\le n}\{w_{p}\}\), \(\tilde{\kappa }\) as denoted above, and \(W=\text {diag}(w_{1}^{2}, \cdots , w_{n}^{2})\).
Proof
It following from Lyapunov function (12) and error system (10) that
where \(M=\mu _1BB^{T}+W/\mu _1+\mu _1I_{n}+\mu _2FF^{T}-2A\). Similar to the arguments in Corollary 2, we know that the synchronization of fractional neural networks (9) with identical derivative order can be realized via quantized control (14). \(\square \)
Remark 5
In previous works [24, 27,28,29,30, 41], the continuous control or quantized control was utilized to realize the synchronization of fractional neural networks that are with identical derivative order. In contrast, the two kinds of controls are introduced to implement the synchronization of MoFNNs in Theorem 1 and Theorem 2 respectively. Therefore, the results of this paper can be viewed as extensions for the existing works.
4 A Numerical Example
In this section, an example is provided to demonstrate the effectiveness of results.
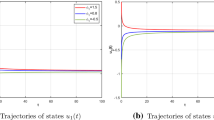
Consider a three-dimensional \((n=3)\) isolated MoFNN with time-varying delays, where \(\beta =(0.92, 0.95, 0.98)^T\); \(\tau _1(t)=\tau _2(t)=\tau _3(t)=\lg (1+t)/10\); \(h_1(\cdot )=h_2(\cdot )=h_3(\cdot )=\tanh (\cdot )\); \(E=(0,0,0)^T\); \(A=\text {diag}(1,1,1)\), and
The orbits of network (2) with initial values \(\phi (t_0)=(1.1,0.01,-1)^T\) \((t_0=0)\) are depicted in Fig. 1.

The graph of orbits for the network (2)
In the following, a multi-order fractional system composed of 9 \((N=9)\) MoFNNs (1) with time-varying delays is considered, in which matrix \(\Gamma =\text {diag}(1, 1, 1)\). Moreover, the initial conditions of those networks are chosen randomly and the topology is shown in Fig. 2, whose weights of all directed connections are equal 1. According to the given activation function \(\tanh (\cdot )\), it can be verified that there exist \(w_p=1\) \((p=1,2,3)\) such that Assumption 1 holds. In addition, by virtue of the introduced pinning control, the first three \((l=3)\) nodes are selected to be controlled so that the graph of this system has a spanning tree, as shown in Fig. 2, which means that Assumption 2 holds.

The topology of MoFNNs (1) with a virtual node 0
Case 1. By utilizing continuous control (7), pick up \(d_1=d_2=d_3=5\), i.e., \(D=\text {diag}(5, 5, 5, 0,0,0,0,0,0,0)\). By virtue of Lemma 3, there exists \(\Omega =\text {diag}(1,1,1,1,1,1,1,1,1)\) such that (4) holds with \(\kappa =1.5667\). When choosing coupling strength \(c=8\), one obtains
It can be verified that all eigenvalues of matrix \(\beth +\daleth \) have negative real parts, showing that \(\beth +\daleth \) is a Hurwitz matrix. According to Theorem 1, the synchronization of MoFNNs (1) can be achieved via continuous control (7).
Finally, denote \(\mathcal {E}(t)=\max _{1\le i\le 9}\Vert x_{i}(t)-s(t)\Vert \) as synchronized error to illustrate the viability of the above results. Figure 3 shows the transient behaviors of \(\mathcal {E}(t)\) with regard to t, which indicates that the realization of synchronization on MoFNNs via continuous control (7).

The transient behaviors of synchronized error \(\mathcal {E}(t)\) under continuous control (7)
Case 2. Choose \(\theta =0.8\) and \(\chi _0=2\) as the parameters of quantizer (13). By applying quantized control (14), take \(d_1=d_2=d_3=10\), i.e., \(D=\text {diag}(10, 10, 10, 0,0,0,0,0,0,0)\) and \(\tilde{D}=\text {diag}(2, 2, 2, 0,0,0,0,0,0,0)\). Similarly, according to Lemma 3, there exists \(\Omega =\text {diag}(1,1,1,1,1,1,1,1,1)\) such that (4) holds with \(\tilde{\kappa }=1.5056\). When choosing \(c=8.3\), one has
We can verify that \(\tilde{\beth }+\daleth \) is a Hurwitz matrix. Hence, in view of Theorem 2, the synchronization of MoFNNs (1) can be realized via quantized control (14). Figure 4 depicts the transient behaviors of \(\mathcal {E}(t)\) with regard to t, which indicates that the realization of synchronization on MoFNNs via quantized control (14).

The transient behaviors of synchronized error \(\mathcal {E}(t)\) under quantized control (14)
Figures 5 and 6 illustrate the time evolutions of controls utilized in Case 1 and Case 2, respectively. In view that the control in Case 2 is the quantized control, it can reduce the transmission pressure compared with the continuous control utilized in Case 1.

The time evolutions of linear control \(u_{ij}(t)\) \((i,j=1,2,3)\) in Case 1

The time evolutions of quantized control \(u_{ij}(t)\) \((i,j=1,2,3)\) in Case 2
5 Conclusion
The synchronization on MoFNNs with time-varying delays has been discussed in this paper. By means of the vector Lyapunov function, the synchronized criteria of MoFNNs with time-varying delays under continuous control and quantized control have been derived respectively. Compared with traditional fractional neural networks with identical derivative order, the systems investigated in this paper are general and with multiple derivative orders. An example for demonstrating the effectiveness of theoretical results has been presented. Future research efforts may aim to extend the results to other types of synchronization on MoFNNs with time-varying delays, such as cluster synchronization, finite-time synchronization, etc.
References
Zhang H, Ye M, Ye R, Cao J (2018) Synchronization stability of Riemann-Liouville fractional delay-coupled complex neural networks. Phys A 508:155–165
Zhang H, Cheng J, Zhang H, Zhang W, Cao J (2021) Quasi-uniform synchronization of Caputo type fractional neural networks with leakage and discrete delays. Chaos Soliton Fract 152:111432
Aadhithiyan S, Raja R, Zhu Q, Alzabut J, Niezabitowski M, Lim CP (2021) Modified projective synchronization of distributive fractional order complex dynamic networks with model uncertainty via adaptive control. Chaos Soliton Fract 147:110853
Perdikaris P, Karniadakis GE (2014) Fractional-order viscoelasticity in one-dimensional blood flow models. Ann Biomed Eng 42(5):1012–1023
Allagui A, Freeborn TJ, Elwakil AS, Fouda ME, Maundy BJ, Radwan AG, Said Z, Abdelkareem MA (2018) Review of fractional-order electrical characterization of supercapacitors. J Power Sour 400:457–467
Sierociuk D, Ziubinski P (2014) Fractional order estimation schemes for fractional and integer order systems with constant and variable fractional order colored noise. Circuits Syst Signal Process 33(12):3861–3882
Pu Y, Yi Z, Zhou J (2016) Fractional Hopfield neural networks: fractional dynamic associative recurrent neural networks. IEEE Trans Neural Netw Learn Syst 28(10):2319–2333
Boroomand A, Menhaj MB (2009) On-line nonlinear systems identification of coupled tanks via fractional differential neural networks, in Proc. Guilin, China, Chin. Control Decision Conf., pp 2185–2189
Aguilar CJZ, Gmez-Aguilar JF, Alvarado-Martnez VM, Romero-Ugalde HM (2020) Fractional order neural networks for system identification. Chaos Soliton Fract 130:109444
Shen J, Lam J (2016) Stability and performance analysis for positive fractional-order systems with time-varying delays. IEEE Trans Autom Control 61(9):2676–2681
Diethelm K, Siegmund S, Tuan HT (2017) Asymptotic behavior of solutions of linear multi-order fractional differential systems. Fract Calc Appl Anal 20(5):1165–1195
Gallegos JA, Duarte-Mermoud MA (2018) A dissipative approach to the stability of multi-order fractional systems. IMA J Math Control Inf 37(1):143–158
Gallegos JA, Aguila-Camacho N, Duarte-Mermoud MA (2019) Smooth solutions to mixed-order fractional differential systems with applications to stability analysis. J Integral Equ Appl 31(1):59–84
Lenka BK (2019) Fractional comparison method and asymptotic stability results for multivariable fractional order systems. Commun Nonlin Sci Numer Simul 69:398–415
Jia J, Wang F, Zeng Z (2021) Global stabilization of fractional-order memristor-based neural networks with incommensurate orders and multiple time-varying delays: a positive-system-based approach, Nonlinear Dynam., 1-27
Jmal A, Makhlouf AB, Nagy A, Naifar O (2019) Finite-time stability for Caputo-Katugampola fractional-order time-delayed neural networks. Neural Process Lett 50(1):607–621
Liu P, Wang J, Zeng Z (2021) An overview of the stability analysis of recurrent neural networks with multiple equilibria. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2021.3105519
Xu C, Liu Z, Yao L, Aouiti C (2021) Further exploration on bifurcation of fractional-order six-neuron bi-directional associative memory neural networks with multi-delays. Appl Math Comput 410:126458
Lin J, Xu R, Li L (2021) Mittag-Leffler synchronization for impulsive fractional-order bidirectional associative memory neural networks via optimal linear feedback control. Nonlinear Anal-Model 25(2):207–226
Tang Z, Park JH, Wang Y, Feng J (2020) Impulsive synchronization of derivative coupled neural networks with cluster-tree topology. IEEE Trans Netw Sci Eng 7(3):1788–1798
Zhang W, Zhang H, Cao J, Alsaadi FE, Chen D (2019) Synchronization in uncertain fractional-order memristive complex-valued neural networks with multiple time delays. Neural Netw 110:186–198
Song X, Song S, Li B, Tejado Balsera I (2018) Adaptive projective synchronization for time-delayed fractional-order neural networks with uncertain parameters and its application in secure communications. Trans Inst Meas Control 40(10):3078–3087
Gu Y, Yu Y, Wang H (2017) Synchronization-based parameter estimation of fractional-order neural networks. Phys A 483:351–361
Fan Y, Huang X, Wang Z, Xia J, Shen H (2020) Quantized control for synchronization of delayed fractional-order memristive neural networks. Neural Process Lett 52:403–419
Chang Q, Hu A, Yang Y, Li L (2020) The optimization of synchronization control parameters for fractional-order delayed memristive neural networks using siwpso. Neural Process Lett 51(2):1541–1556
Liu P, Xu M, Sun J, Zeng Z (2020) On pinning linear and adaptive synchronization of multiple fractional-order neural networks with unbounded time-varying delays, IEEE Trans. Cybern
Liu P, Zeng Z, Wang J (2018) Global synchronization of coupled fractional-order recurrent neural networks. IEEE Trans Neural Netw Learn Syst 30(8):2358–2368
Liu P, Zeng Z, Wang J (2020) Asymptotic and finite-time cluster synchronization of coupled fractional-order neural networks with time delay. IEEE Trans Neural Netw Learn Syst 31(11):4956–4967
Liu P, Kong M, Xu M, Sun J, Liu N (2020) Pinning synchronization of coupled fractional-order time-varying delayed neural networks with arbitrary fixed topology, Neurocomputing,
Ye R, Liu X, Zhang H, Cao J (2019) Global Mittag-Leffler synchronization for fractional-order BAM neural networks with impulses and multiple variable delays via delayed-feedback control strategy. Neural Process Lett 49(1):1–18
Lu W, Chen T (2004) Synchronization of coupled connected neural networks with delays. IEEE Trans Circuits Syst 51(12):2491–2503
Zhu Q (2018) Stabilization of stochastic nonlinear delay systems with exogenous disturbances and the event-triggered feedback control. IEEE Trans Automat Contr 64(9):3764–3771
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier, The Netherlands
Aguila-Camacho N, Duarte-Mermoud MA, Gallegos JA (2014) Lyapunov functions for fractional order systems. Commun Nonlinear Sci Numer Simul 19(9):2951–2957
Kang Y, Qin J, Ma Q, Gao H, Zheng W (2018) Cluster synchronization for interacting clusters of nonidentical nodes via intermittent pinning control. IEEE Trans Neural Netw Learn Syst 29(5):1747–1759
Wang H, Yu Y, Wen G, Zhang S, Yu J (2015) Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 154:15–23
Liang S, Wu R, Chen L (2016) Adaptive pinning synchronization in fractional-order uncertain complex dynamical networks with delay. Phys A 444:49–62
Kong F, Zhu Q (2021) New fixed-time synchronization control of discontinuous inertial neural networks via indefinite Lyapunov-Krasovskii functional method. Int J Robust Nonlin 31:471–495
Kong F, Zhu Q, Huang T (2021) New fixed-time stability lemmas and applications to the discontinuous fuzzy inertial neural networks. IEEE Trans Fuzzy Syst 29(12):3711–3722
Xu C, Yang X, Lu J, Feng J, Alsaadi FE, Hayat T (2017) Finite-time synchronization of networks via quantized intermittent pinning control. IEEE Trans Cybern 48(10):3021–3027
Bao H, Park JH, Cao J (2021) Adaptive synchronization of fractional-order output-coupling neural networks via quantized output control. IEEE Trans Neural Netw Learn Syst 32(7):3230–3239
Acknowledgements
This research was supported by the National Natural Science Foundation of China under (62076222; 61703313), the Key Scientific Research Project of Universities of Henan Province of China (21A120009), and the Scientific and Technological Project of Henan Province of China (202102310203; 202102310284)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Xu, M., Liu, P., Yang, F. et al. Synchronization Analysis of Multi-Order Fractional Neural Networks Via Continuous and Quantized Controls. Neural Process Lett 54, 3641–3656 (2022). https://doi.org/10.1007/s11063-022-10778-w
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-022-10778-w