
Abstract
In this paper, an original scheme is presented, in order to study the finite-time stability of the equilibrium point, and to prove its existence and uniqueness, for Caputo–Katugampola fractional-order neural networks, with time delay. The proposed scheme uses a newly introduced fractional derivative concept in the literature, which is the Caputo–Katugampola fractional derivative. The effectiveness of the theoretical results is shown through simulations for two numerical examples.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, artificial neural networks can be considered as one of the most used and growing techniques in technology. For instance, they are extensively exploited in voice recognition [1], pattern identification [2] and systems control [3]. It is of a great importance to note that, in electronic implementation of neural networks, time delays are very frequent. This is due to various reasons, such as circuit integration and communication delays [4]. Thus, it is very significant to study the stability of delayed neural networks, from both the theoretical aspect and the practical aspect. During the last three decades, several research works have been conducted in this context [5,6,7,8,9,10,11,12,13]. Though, the great majority of these investigations have been based on infinite time intervals.
The finite-time stability definition has been introduced for the first time in [14]. Finite-time stable systems have been proved to have interesting properties, such as disturbance rejection, better robustness and faster convergence [15]. For this reason, several research works have been conducted to study finite-time stability and stabilization for different classes of systems [16,17,18].
In the last decades, several applications of the fractional calculus in science and engineering have emerged [19, 20]. This fact has considerably stimulated the investigation of fractional-order systems by researchers in the control theory. Indeed, several papers, dealing with this area of research, have been elaborated in the last years, and still, many researchers are working on this field. As examples of the treated queries for fractional-order systems, in the literature, one can cite: model reference control [21], fault reconstruction [22] and finite-time stability analysis [23]. In the last two decades and dealing with artificial neural networks, many researchers have incorporated the fractional calculus in them, see for instance [24,25,26,27]. In particular, some remarkable papers have investigated the finite-time stability problem for fractional neural networks [28,29,30,31]. It is prominent to indicate that, recently, some interesting papers have been published in relation with finite-time stability for fractional-order neural networks with time delay [32,33,34,35,36]. Note that, in these four works, the well-known definition of Caputo fractional derivative has been used.
In the last years, Katugampola has defined a new fractional derivative concept, called the Caputo–Katugampola derivative. This new concept has been shown to be more general than the classical Caputo one [37, 38]. The Caputo–Katugampola derivative is characterized by two parameters: \( \rho > 0 \) and \( 0 < \alpha < 1 \). It is noteworthy to indicate that, if \( \rho = 1 \), this derivative reduces to the classical Caputo one [39]. From a physical point of view, it is being shown in the literature that the Katugampola fractional-order representation is of value. See for instance [40], where it has been insisted that the Caputo–Katugampola derivative is very significant for quantum mechanics.
Motivated by all the above discussions, the authors propose in this paper an original investigation, in which it is question of proving the existence and uniqueness of the equilibrium point, which is finite-time stable, for Caputo–Katugampola fractional-order neural networks, with time delay. In order to demonstrate the existence of a unique equilibrium point, the fixed-point theorem is exploited in this paper. It is of value to note that other research works [41, 42] have used another approach to prove it, which is the topological degree theory. To the best of the authors’ knowledge, no analogue study has been done in the literature for the new general class of Katugampola fractional-order systems. To be more precise, some aspects, in the few similar literature papers, have motivated and have inspired the authors to develop the present paper. In the following, the contribution aspect is clarified, and the main advantages of this work, compared to the literature results, are summarized:
-
In [32,33,34,35,36], the authors have considered Caputo fractional-order neural networks. The present paper investigates a wider class of systems, since the considered Caputo–Katugampola fractional derivative is more general than the classical Caputo fractional derivative.
-
The present paper has another merit, compared to [32, 33, 36], since these three cited works did not investigate the existence and uniqueness problem of the equilibrium point.
Throughout the paper, the authors investigate the fractional-order neural networks with time delay, given by the following representation:
The corresponding vector form is:
for \( t \in \left[ {t_{0} ,t_{f} } \right] \), where \( {}_{{}}^{C} D_{{t_{0} }}^{\alpha ,\rho } \) is the Caputo–Katugampola fractional derivative (see Definition 3 in the preliminaries’ section), with the derivation parameters: \( 0 < \alpha < 1 \), and \( \rho > 0 \). \( x\left( t \right) = \left( {x_{1} \left( t \right),x_{2} \left( t \right), \ldots x_{n} \left( t \right)} \right)^{T} \in {\mathbb{R}}^{n} \) is the state vector, \( f\left( {x\left( t \right)} \right) = \left( {f_{1} \left( {x_{1} \left( t \right)} \right),f_{2} \left( {x_{2} \left( t \right)} \right), \ldots ,f_{n} \left( {x_{n} \left( t \right)} \right)} \right)^{T} \in {\mathbb{R}}^{n} \) is the neuron activation function, \( C = diag\left( {c_{1} ,c_{2} , \ldots c_{n} } \right) \), is the rate, with which the ith neuron resets its potential to the resting state in isolation when disconnection from the networks and the external inputs \( (c_{i} > 0) \); \( A = \left( {a_{ij} } \right)_{n \times n} \) and \( B = \left( {b_{ij} } \right)_{n \times n} \) represent the connection between the jth neuron and the ith neuron at \( t \) and \( t - \tau \), respectively, (\( \tau \) is the nonnegative constant delay), \( I = \left( {I_{1} ,I_{2} , \ldots I_{n} } \right)^{T} \) stands for constant inputs.
With the initial conditions:
\( \psi_{i} \left( s \right) \) are continuous functions defined on \( \left[ { - \tau , 0} \right] \), such that: \( ||\psi || = \sup_{{s \in \left[ { - \tau ,0} \right]}} \mathop \sum \nolimits_{i = 1}^{n} \left| {\psi_{i} \left( s \right)} \right| \).
The rest of the paper is organized as follows. In Sect. 2, some useful preliminaries are given. In Sect. 3, the main results of this paper are detailed. Two theorems are demonstrated, in order to prove the existence and uniqueness of the equilibrium point, which is finite-time stable, for Caputo–Katugampola fractional-order neural networks, with time delay. Theorem 1 investigates the case \( 0 < \alpha \le \frac{1}{2} \), while Theorem 2 investigates the case \( \frac{1}{2} < \alpha < 1 \). Finally, in Sect. 4, The effectiveness of the theoretical results is shown through simulations for two numerical examples.
2 Preliminaries
Definition 1
[37] (Katugampola fractional integral) Given \( \alpha > 0 \), \( \rho > 0 \) and an interval \( \left[ {a, b} \right] \) of \( {\mathbb{R}} \), where \( 0 < a < b \). The Katugampola fractional integral of a function \( x \in L^{1} \left( {\left[ {a, b} \right]} \right) \) is defined by:
where \( \varGamma \) is the gamma function.
Definition 2
[38] (Katugampola fractional derivative) Given \( 0 < \alpha < 1 \), \( \rho > 0 \) and an interval \( \left[ {a, b} \right] \) of \( {\mathbb{R}} \), where \( 0 < a < b \). The Katugampola fractional derivative is defined by
Definition 3
(Caputo–Katugampola fractional derivative) Given \( 0 < \alpha < 1 \), \( \rho > 0 \) and an interval \( \left[ {a, b} \right] \) of \( {\mathbb{R}} \), where \( 0 < a < b \). The Caputo–Katugampola fractional derivative is defined by
Definition 4
[34] The equilibrium point \( x^{*} = \left( {x_{1}^{*} ,x_{2}^{*} , \ldots ,x_{n}^{*} } \right)^{T} \) of system (1) is said to be finite time stable with respect to \( \left\{ {t_{0} , \delta , \varepsilon ,\varTheta , \tau } \right\} \), \( 0 < \delta < \varepsilon \), δ, \( \varepsilon \text{ } \in {\mathbb{R}} \), \( \varTheta = \left[ {t_{0} ,t_{0} + t_{f} } \right] \), such that for any solution \( x\left( t \right) = \left( {x_{1} \left( t \right),x_{2} \left( t \right), \ldots x_{n} \left( t \right)} \right)^{T} \) of system (1) with initial conditions (3), if and only if
implies
where
Lemma 1
[43] Let\( n\text{ } \in {\mathbb{N}} \)and\( a_{1} ,a_{2} , \ldots ,a_{n} \)be nonnegative real numbers. Then for\( l > 1 \);
Lemma 2
(Holder inequality, Cauchy–Schwartz inequality) [44] Let\( p,q > 1 \)and\( \frac{1}{p} + \frac{1}{q} = 1 \). If\( f_{1} \in L^{p} \left( {\left[ {a,b} \right]} \right) \), \( , f_{2} \in L^{q} \left( {\left[ {a,b} \right]} \right) \), then\( f_{1} f_{2} \in L^{1} \left( {\left[ {a,b} \right]} \right) \)and:
where\( L^{p} \left( {\left[ {a,b} \right]} \right) \)is the Banach space of all Lebesgue measurable functions\( f:\left[ {a,b} \right] \to {\mathbb{R}} \), with\( \mathop \int \limits_{a}^{b} \left| {f \left( x \right)} \right|^{p} dx < \infty \). If \( p = q = 2 \), then it reduces to the Cauchy–Schwartz inequality:
3 Main Results
First, these assumptions are considered:
(H1) The functions \( f_{i} \) are Lipschitz; one can find constants \( F_{i} > 0 \) such that
for any \( x, y \in {\mathbb{R}} \), \( i = 1, 2, \ldots , n \).
(H2) Given \( a_{ij} \), \( b_{ij} \), \( c_{i} \) and \( F_{j} \), one has:
Theorem 1
Assume that (H1) and (H2) hold and\( 0 < \alpha \le \frac{1}{2} \). If the following condition is satisfied:
where\( N = \frac{{3^{q - 1} \rho^{ - q\alpha } }}{{\left( {\varGamma \left( \alpha \right)} \right)^{q} }}\left( {\frac{{\varGamma \left( {p\left( {\alpha - 1} \right) + 1} \right)}}{{p^{\alpha p - p + 1} }}} \right)^{{\frac{q}{p}}} \), \( p = 1 + \alpha \)and\( q = \frac{\alpha + 1}{\alpha } \), \( A_{1} = { \hbox{max} }_{1 \le i \le n} \left( {c_{i} } \right) + \sum\nolimits_{i = 1}^{n} {{ \hbox{max} }_{1 \le j \le n} } \left( {\left| {a_{ij} } \right|F_{j} } \right) \)and\( A_{2} = \sum\nolimits_{i = 1}^{n} {{ \hbox{max} }_{1 \le j \le n} } \left( {\left| {b_{ij} } \right|F_{j} } \right) \). Then, there exists a unique equilibrium point\( x^{*} = \left( {x_{1}^{*} ,x_{2}^{*} , \ldots ,x_{n}^{*} } \right)^{T} \)of system (1) which is finite time stable with respect to\( \left\{ {t_{0} , \delta , \varepsilon ,\varTheta , \tau } \right\} \), \( 0 < \delta < \varepsilon \), δ, \( \varepsilon \text{ } \in {\mathbb{R}} \), \( \varTheta = \left[ {t_{0} , t_{0} + t_{f} } \right]. \)
Proof
The first step, is to prove that there exists a unique equilibrium point for the considered class of systems. We consider the function \( \varPhi \) given in [35] by \( \varPhi \left( u \right) = \left( {\varPhi_{1} \left( u \right),\varPhi_{2} \left( u \right), \ldots ,\varPhi_{n} \left( u \right)} \right)^{T} \) where
for \( u = \left( {u_{1} ,u_{2} , \ldots u_{n} } \right)^{T} . \)
Consider two vectors \( u = \left( {u_{1} ,u_{2} , \ldots u_{n} } \right)^{T} \) and \( v = \left( {v,v_{2} , \ldots v_{n} } \right)^{T} \). Then, using assumption (H1) and the same development as [35], we get:
Hence \( \varPhi :{\mathbb{R}}^{n} \to {\mathbb{R}}^{n} \) is a contraction mapping on \( {\mathbb{R}}^{n} \), which means that there exists a unique fixed point \( u^{*} \in {\mathbb{R}}^{n} \) satisfying \( \varPhi \left( {u^{*} } \right) = u^{*} \):
Consider \( c_{i} x_{i}^{*} = u_{i}^{*} \), \( i = 1,2, \ldots ,n \), then
Thus, system (1) has a unique equilibrium point \( x^{*} \).
Now, the goal is to check the finite time stability of \( x^{*} = \left( {x_{1}^{*} ,x_{2}^{*} , \ldots ,x_{n}^{*} } \right)^{T} \). Define \( x\left( t \right) = \left( {x_{1} \left( t \right),x_{2} \left( t \right), \ldots x_{n} \left( t \right)} \right)^{T} \) as a solution of system (1). We have
The integral equation of (8) is
where
Then,
It follows that,
So,
where \( A_{1} = { \hbox{max} }_{1 \le i \le n} \left( {c_{i} } \right) + \sum\nolimits_{i = 1}^{n} {{ \hbox{max} }_{1 \le j \le n} } \left( {\left| {a_{ij} } \right|F_{j} } \right) \), \( A_{2} = \sum\nolimits_{i = 1}^{n} {{ \hbox{max} }_{1 \le j \le n} } \left( {\left| {b_{ij} } \right|F_{j} } \right) \) and \( \varphi = \psi - x^{*} \). Let \( u\left( t \right) = x\left( t \right) - x^{*} \). Using the Holder inequality, one has:
Using the change of variable \( \mu = p\left( {t^{\rho } - s^{\rho } } \right) \), we get:
It follows from Lemma 1 (for \( n = 3 \) and \( l = q \)) that:
Case 1
Let \( t \in \left[ {t_{0} ,t_{0} + \tau } \right] \):
We have
Case 2
Let \( t > t_{0} + \tau \):
We have
So,
The Gronwall inequality on \( \left[ {t_{0} ; t_{f} } \right] \), gives:
Hence,
So, if (4) is satisfied and \( ||\varphi || < \delta \), then \( ||x\left( t \right)|| < \in , \;\forall t \in \left[ {t_{0} ,t_{f} } \right] \) i.e., system (1) is finite-time stable w.r.t \( \left\{ {t_{0} , \delta , \varepsilon ,\varTheta , \tau } \right\} \)
Theorem 2
Suppose\( \alpha \in \left( {\frac{1}{2},1} \right) \)and the fractional-order system (1) satisfies the initial condition\( x\left( {t_{0} + s} \right) = \varphi \left( s \right), - \tau < s < 0 \). If the following condition is satisfied:
where\( M = \frac{{3\rho^{ - 2\alpha } \varGamma \left( {2\alpha - 1} \right)}}{{4^{\alpha } \left( {\varGamma \left( \alpha \right)} \right)^{2} }}, \)then (1) is finite-time stable with respect to\( \left\{ {t_{0} , \delta , \varepsilon ,\varTheta , \tau } \right\} \), \( \delta < \varepsilon \).
Proof
As the same in Theorem 1, we have the following estimation:
By using the Cauchy-Schwartz inequality, one has
By using the change of variable \( \mu = t^{\rho } - s^{\rho } \), we get:
It follows from Lemma 1 (for \( n = 3 \) and \( l = 2 \)) that:
Hence,
In the following, there are two cases as \( t \in \left[ {t_{0} ,t_{0} + \tau } \right] \) or \( t \in \left[ {t_{0} + \tau , t_{f} } \right] \).
Case 1
\( t \in \left[ {t_{0} ,t_{0} + \tau } \right] \):
We have
Case 2
Let \( t > t_{0} + \tau \)
We have
So,
The Gronwall inequality on \( \left[ {t_{0} ; t_{f} } \right] \), gives:
Hence,
So, if (12) is satisfied and \( \varphi < \delta \), then \( x\left( t \right) < \varepsilon , \forall t \in \left[ {t_{0} ,t_{f} } \right] \) i.e., system (1) is finite-time stable w.r.t \( \left\{ {t_{0} , \delta , \varepsilon ,\varTheta , \tau } \right\} \).
Remark 1
If \( \rho \) = 1, then system (1) will be reduced to a fractional-order neural networks system, under the Caputo derivative definition. For that case of Caputo derivative, the study on the existence of a unique equilibrium point and finite-time stability for system (1) has been given in [34, 35]. To the best of the authors’ knowledge, this is the first time that the problem of finite-time stability for Caputo–Katugampola fractional-order neural networks, with time-delay, is investigated.
Remark 2
The proofs of Theorems 1 and 2 have been based on the ones of the authors’ sister paper [23]. It is not possible to demonstrate these to theorems at the same time, using \( 0 < \alpha \le 1 \). That is why the authors have divided the analysis into two theorems.
4 Numerical Examples
In this section, two expository examples with their numerical results will be given in order to clarify the validity of the theoretical results which obtained in the previous sections.
Example 1
Let us consider the Caputo–Katugampola fractional-order neural networks system, with time delay:
where \( \tau = 0.5, f_{j} \left( {x_{j} \left( t \right)} \right) = \tanh \left( {x_{j} \left( t \right)} \right), j = 1,2 \) and:
Example 2
Let us consider the Caputo–Katugampola fractional-order neural networks system, with time delay:
where \( \tau = 0.2, f_{j} \left( {x_{j} \left( t \right)} \right) = \frac{1}{2}\left( {\left| {x + 1} \right| - \left| {x - 1} \right|} \right), j = 1,2,3 \) and
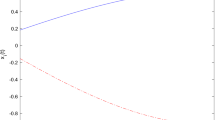
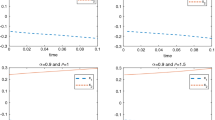
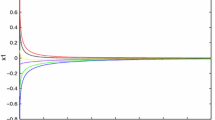
Clearly, the function \( f \) in both examples satisfies the assumption (H1). Also, the hypothesis (H2) is satisfied for \( F_{j} = 1, j = 1,2. \) In Examples 1 and 2, let us assume that \( \delta = 0.31, \varepsilon = 2 \). According to the inequalities (4) and (12) with various values of \( \rho \) and \( \alpha \), we can compute the estimated finite \( ,t_{f} \), of the finite-time stability of both examples as shown in Tables 1 and 2. Moreover, it is obvious from the obtained results in Tables 1 and 2 that the norm of the approximated solutions does not override the value of \( \varepsilon \). Figures 1 and 2, show the numerical simulations with various values of \( \rho \) and \( \alpha \). From the obtained results in the tables and all figures, we can indicate that our results coincided with the theoretical one and the finite-time stability of the proposed systems.

States evolution for Example 1 (different cases of \( \rho \) and \( \alpha \))

States evolution for Example 2 (different cases of \( \rho \) and \( \alpha \))
5 Conclusion
In this research paper, fractional-order neural networks with time-delay have been investigated. An advantageous and newly introduced fractional-order derivative concept in the literature, has been exploited: the Caputo–Katugampola fractional derivative. The main purpose of the paper has been to demonstrate the existence of a unique equilibrium point, and to prove its finite-time stability, for the general considered class of fractional neural networks. In order to further show the effectiveness of the used methodology, two simulation examples have been given and analyzed.
References
Price M, Glass J, Chandrakasan AP (2018) A low-power speech recognizer and voice activity detector using deep neural networks. IEEE J Solid-State Circuits 53(1):66–75
Gopinath B (2018) A benign and malignant pattern identification in cytopathological images of thyroid nodules using gabor filter and neural networks. Asian J Converg Technol. https://doi.org/10.33130/asian%20journals.v4iI.414
Li Y, Tong S (2017) Adaptive neural networks decentralized FTC design for nonstrict-feedback nonlinear interconnected large-scale systems against actuator faults. IEEE Trans Neural Netw Learn Syst 28(11):2541–2554
Rajchakit G (2017) Stability of control neural networks. Int J Res Sci Eng 3(6):22
Zhang XM, Han QL (2014) Global asymptotic stability analysis for delayed neural networks using a matrix-based quadratic convex approach. Neural Netw 54:57–69
Zhu Q, Cao J (2014) Mean-square exponential input-to-state stability of stochastic delayed neural networks. Neurocomputing 131:157–163
Chen X, Song Q (2013) Global stability of complex-valued neural networks with both leakage time delay and discrete time delay on time scales. Neurocomputing 121:254–264
Xu C, Chen L (2018) Effect of leakage delay on the almost periodic solutions of fuzzy cellular neural networks. J Exp Theor Artif Intell 30(6):993–1011
Xu C, Chen L, Li P (2019) Effect of proportional delays and continuously distributed leakage delays on global exponential convergence of CNNS. Asian J Control 21(5):1–8
Xu C (2018) Local and global Hopf bifurcation analysis on simplified bidirectional associative memory neural networks with multiple delays. Math Comput Simul 149:69–90
Xu C, Tang X, Li P (2018) Existence and global stability of almost automorphic solutions for shunting inhibitory cellular neural networks with time-varying delays in leakage terms on time scales. J Appl Anal Comput 8(4):1033–1049
Xu C, Li P (2018) On anti-periodic solutions for neutral shunting inhibitory cellular neural networks with time-varying delays and D operator. Neurocomputing 275:377–382
Xu C, Li P (2018) Global exponential convergence of fuzzy cellular neural networks with leakage delays, distributed delays and proportional delays. Circuits Syst Signal Process 37(1):163–177
Kamenkov G (1953) On stability of motion over a finite interval of time. J Appl Math Mech 17(2):529–540
Bhat SP, Bernstein DS (1998) Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans Autom Control 43(5):678–682
Wang H, Zhu Q (2015) Finite-time stabilization of high-order stochastic nonlinear systems in strict-feedback form. Automatica 54:284–291
Mobayen S (2016) Finite-time stabilization of a class of chaotic systems with matched and unmatched uncertainties: an LMI approach. Complexity 21(5):14–19
Lu K, Xia Y (2015) Finite-time attitude stabilization for rigid spacecraft. Int J Robust Nonlinear Control 25(1):32–51
Engheta N (1996) On fractional calculus and fractional multipoles in electromagnetism. IEEE Trans Antennas Propag 44(4):554–566
Laskin N (2000) Fractional market dynamics. Phys A 287(3):482–492
Jmal A, Naifar O, Ben Makhlouf A, Derbel N, Hammami MA (2018) Observer-based model reference control for linear fractional-order systems. Int J Digit Signal Smart Syst 2(2):136–149
Jmal A, Naifar O, Ben Makhlouf A, Derbel N, Hammami MA (2018) Sensor fault estimation for fractional-order descriptor one-sided Lipschitz systems. Nonlinear Dyn 91(3):1713–1722
Ben Makhlouf A, Nagy AM (2018) Finite‐time stability of linear Caputo–Katugampola fractional-order time delay systems. Asian J Control. https://doi.org/10.1002/asjc.1880
Kaslik E, Sivasundaram S (2012) Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw 32:245–256
Bao HB, Cao JD (2015) Projective synchronization of fractional-order memristor-based neural networks. Neural Netw 63:1–9
Thuan MV, Huong DC, Hong DT (2018) New results on robust finite-time passivity for fractional-order neural networks with uncertainties. Neural Process Lett. https://doi.org/10.1007/s11063-018-9902-9
Thuan MV, Binh TN, Huong DC (2018) Finite-time guaranteed cost control of caputo fractional-order neural networks. Asian J Control 22(1):1–10
Peng X, Wu H, Song K, Shi J (2017) Global synchronization in finite time for fractional-order neural networks with discontinuous activations and time delays. Neural Netw 94:46–54
Peng X, Wu H, Cao J (2018) Global nonfragile synchronization in finite time for fractional-order discontinuous neural networks with nonlinear growth activations. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2018.2876726
Peng X, Wu H (2018) Robust mittag-leffler synchronization for uncertain fractional-order discontinuous neural networks via non-fragile control strategy. Neural Process Lett 48(3):1521–1542
Liu M, Wu H (2018) Stochastic finite-time synchronization for discontinuous semi-Markovian switching neural networks with time delays and noise disturbance. Neurocomputing 310:246–264
Ran-Chao W, Xin-Dong H, Li-Ping C (2013) Finite-time stability of fractional-order neural networks with delay. Commun Theor Phys 60(2):189
Alofi A, Cao J, Elaiw A, Al-Mazrooei A (2014) Delay-dependent stability criterion of Caputo fractional neural networks with distributed delay. Discret Dyn Nat Soc. https://doi.org/10.1155/2014/529358
Ke Y, Miao C (2015) Stability analysis of fractional-order Cohen–Grossberg neural networks with time delay. Int J Comput Math 92(6):1102–1113
Yang X, Song Q, Liu Y, Zhao Z (2015) Finite-time stability analysis of fractional-order neural networks with delay. Neurocomputing 152:19–26
Xu C, Li P (2018) On finite-time stability for fractional-order neural networks with proportional delays. Neural Process Lett. https://doi.org/10.1007/s11063-018-9917-2
Katugampola UN (2011) New approach to a generalized fractional integral. Appl Math Comput 218(3):860–865
Katugampola UN (2014) A new approach to generalized fractional derivatives. Bull Math Anal Appl 6(4):1–15
Kilbas AA, Srivastava HH, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier, Amsterdam
Anderson DR, Ulness DJ (2015) Properties of the Katugampola fractional derivative with potential application in quantum mechanics. J Math Phys 56(6):063502
Wu H, Zhang X, Xue S, Wang L, Wang Y (2016) LMI conditions to global Mittag–Leffler stability of fractional-order neural networks with impulses. Neurocomputing 193:148–154
Wang LF, Wu H, Liu DY, Boutat D, Chen YM (2018) Lur’e Postnikov Lyapunov functional technique to global Mittag–Leffler stability of fractional-order neural networks with piecewise constant argument. Neurocomputing 302:23–32
Kuczma M (2009) An introduction to the theory of functional equations and inequalities: Cauchy’s equation and Jensen’s inequality. Springer Science & Business Media, Berlin
Mitrinovic ND (1970) Analytic inequalities. Springer, New York
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflicts of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations
Rights and permissions
About this article

Cite this article
Jmal, A., Ben Makhlouf, A., Nagy, A.M. et al. Finite-Time Stability for Caputo–Katugampola Fractional-Order Time-Delayed Neural Networks. Neural Process Lett 50, 607–621 (2019). https://doi.org/10.1007/s11063-019-10060-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-019-10060-6