
Abstract
In this paper, we are concerned with the exponential synchronization for a class of two delayed complex-valued recurrent neural networks (CVRNNs) with discontinuous neuron activations. By separating CVRNNs into real and imaginary parts, forming an equivalent real-valued subsystems, under the framework of differential inclusions, novel state feedback controllers are designed and novel criteria are established to ensure the exponential stability of error system, and thus the drive system exponentially synchronize with the response system. The obtained results are essentially new and complement previously known ones. The practicability of theoretical results is also supported via a numerical example.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, recurrent neural networks (RNNs) have received increasing research interests from many fields of science and technology due to their widespread applications in associative memories, signal processing, pattern recognition, and optimization problems [1, 2]. It is known that these applications are closely dependent on the dynamic properties of neural networks. For this reason, qualitative analysis is essential and important in the design and implementation of neural networks.
Compared with traditional neural network models, discontinuous neural networks, especially, with discontinuous activations possess obvious preponderance since it has the ability to non-linear mapping. In ideal circumstances, it can approximate many linear and non-linear relationship. At the same time, it has the self-learning autogenous shrinkage characteristics, and has the strong robustness and fault tolerance. Considering this fact, much efforts have been devoted to studying the dynamical properties of neural networks with discontinuous activations, see [3,4,5,6,7,8,9,10,11] and the references therein.
Nowadays, complex-valued recurrent neural networks (CVRNNs) have stirred enormous research interest because of their prominent values in such as physical systems dealing with electromagnetic, light, ultrasonic, and quantum waves [12]. Since CVRNNs posses complex-valued state, activation function output, and connection weight, they have a number of advantages that real-valued recurrent neural networks (RVRNNs) do not have, for example, the single real-valued neuron cannot deal with the XOR problem and the detection of symmetry problem, but a single complex-valued neuron with the orthogonal decision boundaries can successfully accomplish these problems [13], which shows that the complex-valued neurons have strong computing capabilities and thus CVRNNs have widespread engineering applications in than RVRNNs. Currently, there are some prominent results on dynamical analysis of various CVRNNs, see [14,15,16,17,18,19,20] and the references therein.
It should be noted that the existing references mainly focused on the stability or dissipativity problems, and the activation functions employed in their results are continuous cases. Synchronization, as a class of nonlinear characteristics, has attracted much attention in many scientific disciplines [21, 22] since it can be applied to combinatorial optimization, image processing, and secure communication [23]. However, results on synchronization of discontinuous CVRNNs are still quite rare (see [24,25,26,27]), a common limitation in these studies is that the discontinuity of activations as well as the complex range of system parameter variations, which leads to the theoretical and technical difficulties in studying the synchronization dynamics of CVRNNs. On the other hand, to the best of the authors’ knowledge, the exponential synchronization issue for delayed CVRNNs with discontinuous activations has not been reported yet in the existing literature.
Motivated by the aforementioned discussions, this paper studies the global exponential synchronization problem for a class of delayed CVRNNs with discontinuous activations. By utilizing the drive-response scheme, and exploiting the theory of differential equations with discontinuous right-hand sides, novel discontinuous state feedback controllers are designed and new algebra criteria are established to achieve the exponential stability of error CVRNNs. Then, exponential synchronization of drive-response CVRNNs can be realized. Finally, The effectiveness and advantages of the proposed results are verified via a numerical example.
The outline of this paper is organized as follows. The model description and some preliminaries are presented in Sect. 2. The main results are established in Sect. 3. In Sect. 4, an illustrative numerical example is provided. Finally, conclusions are drawn in Sect. 5.
Notations Let \(\mathbb {R}\) and \(\mathbb {R}^{n}\) be the space of real numbers, and the n dimensional real Euclidean space respectively, while \(\mathbb {C}\) and \(\mathbb {C}^{n}\) respectively denote the set of all complex numbers, and the set of all n-dimensional complex-valued vectors. Given the column vector \(x=(x_{1},x_{2},\ldots ,x_{n})^\mathrm{T}\in \mathbb {R}^{n}\), where the superscript ‘\(\mathrm{T}\)’ represents the transpose of a vector, \(\Vert x\Vert \) is the Euclidean vector norm, i.e., \(\Vert x\Vert =(\sum \nolimits _{i=1}^{n}x_{i}^2)^{\frac{1}{2}}\).
2 Model Description and Preliminaries
In this paper, we consider the following delayed CVRNNs with discontinuous activations:
where \(z= (z_1, z_2, \ldots , z_n)^\mathrm{T}\in \mathbb {C}^{n}\) is the state vector, \(f(z(\cdot ))=(f_{1}(z_{1}(\cdot )),f_{2}(z_{2}(\cdot )),\ldots ,f_{n}(z_{n}(\cdot )))^\mathrm{T}\in \mathbb {C}^{n} \) denotes the vector-valued activation function, \(D=\mathrm{diag}\{d_{1}, d_{2},\ldots ,d_{n}\}\in \mathbb {R}^{n\times n}\) with \(d_{j}>0 (j=1,2,\ldots ,n)\) represents the self-feedback connection weight matrix, \(A = (a_{jk})_{n\times n} \in \mathbb {C}^{n\times n}\) and \(B = (b_{jk})_{n\times n} \in \mathbb {C}^{n\times n}\) are the connection weight matrix and the delayed connection weight matrix, respectively, \(\tau (t) \) denotes the time-varying transmission delay and satisfies \(0\le \tau (t)\le \tau \), \(I=(I_1, I_2, \ldots , I_n)^\mathrm{T}\in \mathbb {C}^{n}\) is the external input vector. Herein, the initial condition associated with the CVRNNs (2.1) is given by
where \(\varphi _{j}(s), \phi _{j}(s)\in C([-\,\tau , 0], \mathbb {R})\), and \(C([-\,\tau , 0], \mathbb {R})\) denotes the space of continuous functions mapping \([-\,\tau , 0]\) into \(\mathbb {R}\) equipped with the supremum norm \(\Vert \cdot \Vert \).
Let \(z_{j}(t)=x_{j}(t)+\mathrm{i}y_{j}(t), I_{j}=I_{j}^{R}+\mathrm{i}I_{j}^{I}, a_{jk}=a_{jk}^{R}+\mathrm{i}a_{jk}^{I}, b_{jk}=b_{jk}^{R}+\mathrm{i}b_{jk}^{I}, f_{k}(z_{k}(t))=f_{k}^{R}(x_{k}(t),y_{k}(t))+\mathrm{i}f_{k}^{I}(x_{k}(t),y_{k}(t)),\) in which \(\mathrm{i}\) denotes the imaginary unit, i.e., \(\mathrm{i}^{2}=-1\). For simplicity, set \(x_{k}=x_{k}(t), y_{k}=y_{k}(t), x_{k}^{\tau }=x_{k}(t-\tau (t)), y_{k}^{\tau }=y_{k}(t-\tau (t))\). Then CVRNNs (2.1) can be rewritten into the equivalent real and imaginary parts as
Note that the activation function depends on the real and imaginary parts of the state variable of the neuron, which is a bivariate function, so we assume that the activation function belongs to the following function class.
Definition 2.1
(Function class\(\mathscr {F}\)). We say \(f\in \mathscr {F}\) if f satisfies the following assumption:
- (i)
\(f(\cdot ,\cdot )\) is continuous at countable open domains \(G_{s}\) and discontinuous at the boundary of \(G_{s}\), which is composed by finite smooth curves. Herein, \(G_{s_{1}}\bigcap G_{s_{2}}=\emptyset , \) for \( s_{1}\ne s_{2}\), and \(\bigcup \nolimits _{s=1}^{\infty }( G_{s} \bigcup \partial G_{s})=\mathbb {R}^{2}\).
- (ii)
The limitation \(\lim \nolimits _{\mathbf{z}\rightarrow \mathbf{z_{0}}, \mathbf{z_{0}}\in \partial G_{s}}f(\mathbf{z})\) exists.
Remark 2.1
Since the discontinuous activation functions depend on both the real and imaginary parts, in order to make better use of the theory of differential inclusion, we give a reasonable definition to define the discontinuities of activation functions, which is essentially different from the real-valued case in [3,4,5]. On the other hand, in the literature [20, 26], the real and imaginary parts are dependent on the real and imaginary parts of the activations, respectively. From the viewpoint of information storage, such networks under the design of complex-valued activation functions are more suitable for the tasks of high-capacity associative memories than the corresponding ones in [20, 26].
Since \(f_{k}^{R}, f_{k}^{I}\in \mathscr {F}\) for each \(k=1,2,\ldots ,n\), by using the theory of Filippov [28] in studying the properties of solutions for differential equations with discontinuous right-hand sides, we can obtain the following differential inclusion:
where \(\mathbb {F}[f_{k}^{(R\ or\ I)}](\mathbf{z})=\bigcap \nolimits _{\delta >0}\bigcap \nolimits _{\mu (\mathscr {N})=0}\overline{\mathrm{co}}[f_{k}^{(R\ or\ I)}(B(\mathbf{z},\delta )\setminus \mathscr {N})]\), where \(\overline{\mathrm{co}}(\Omega )\) denotes the closure of the convex hull of set \(\Omega \), \(B(\mathbf{z},\delta )=\{\mathbf{y}:\Vert \mathbf{y}-\mathbf{z}\Vert \le \delta , z\in \mathbb {R}^{2}\}\) is the ball with center at z and radius \(\delta \), and \(\mu (\mathcal {N})\) is Lebesgue measure of set \(\mathcal {N}\).
By using the measurable selection theorem [29], if \(x_{j}(t)\) and \(y_{j}(t)\) are solutions of (2.2), there exist measurable selections \(\gamma _{k}^{(R\ or \ I)}(t)\in \mathbb {F}[f_{k}^{(R\ or\ I)}(x_{k}(t),y_{k}(t))] \) such that for almost all (a.a.) \(t\in [-\,\tau , T), T\in [0, \infty ),\) the following equation holds:
In this paper, we shall make drive-response delayed CVRNNs with discontinuous activations achieve exponential synchronization by designing some effective controllers. For simplicity, we refer to system (2.4) as the drive system, the response system is given as follows:
where \(\tilde{x}_{j}(t), \tilde{y}_{j}(t)\) denote the states of the response system, \(u_{j}^{R}, u_{j}^{I}\) are the external control inputs to realize exponential synchronization, the other system parameters are the same as those in (2.1).
Define the error signal between the drive system (2.4) and the response system (2.5) as \(e_{j}(t)=\tilde{z}_{j}(t)-z_{j}(t)=e_{j}^{R}(t)+\mathrm{i} e_{j}^{I}(t)=\tilde{x}_{j}(t)-x_{j}(t)+\mathrm{i}(\tilde{y}_{j}(t)-y_{j}(t))\), and subtract (2.5) from (2.1) yields the following error system:
In order to establish our main results, we make the following assumption on the discontinuous activations.
Assumption 1
For any \(x_{k}, y_{k}, \tilde{x}_{k}, \tilde{y}_{k}\in \mathbb {R}\), there exist nonnegative constants \(\lambda _{k}^{RR}, \lambda _{k}^{RI}, \lambda _{k}^{IR}, \lambda _{k}^{II}, \mu _{k}^{R},\) and \(\mu _{k}^{I}\) such that
where \(\gamma _{k}^{(R\ or \ I)}\in \mathbb {F}[f_{k}^{(R\ or\ I)}(x_{k},y_{k})] \) and \(\tilde{\gamma }_{k}^{(R\ or \ I)}\in \mathbb {F}[f_{k}^{(R\ or\ I)}(\tilde{x}_{k},\tilde{y}_{k})] , k=1,2,\ldots ,n\).
Assumption 2
The delay \(\tau (t)\) satisfies \(\dot{\tau }(t)\le \rho <1\), where \(\rho \) is a positive constant.
Remark 2.2
When the activation \(f_{k}^{(R\ or\ I)}(x_{k},y_{k})\) is a continuous function, \(\mathbb {F}[f_{k}^{(R\ or\ I)}(x_{k},y_{k})]\) is indeed single-valued, and \(\mu _{k}^{R}\) and \(\mu _{k}^{I}\) are equal to 0, then (2.7) reduces to the well-known Lipschitz condition which has widely used in such as [14, 17], which implies that (2.7) not only is an extension of the real-valued case but also generalizes the complex-valued activation function.
Before proceeding, some definitions and lemmas are needed which play important roles in the proof of our main results.
Definition 2.2
Drive-response systems (2.4) and (2.5) are said to be globally exponentially synchronized, if there are control inputs \(u_{j}^{R}(t),u_{j}^{I}(t)\), and further there exist constants \(M>1\) and \(\varepsilon >0\) such that
The constant \(\varepsilon \) is said to be the degree of exponential synchronization.
Lemma 2.3
(Halanay inequality [30]). Assume that constant numbers \(\zeta _{1}\) and \(\zeta _{2}\) satisfy \(\zeta _{1}>\zeta _{2}>0\), V(t) is a nonnegative continuous function on \([t_{0}-\tau , t_{0}]\) and satisfies the following inequality:
where \(\tau \ge 0\) is a constant. Then, for \(t\ge t_{0}\), we have
in which \(\zeta \) is the unique positive solution of the equation \(\zeta =\zeta _{1}-\zeta _{2}e^{\zeta \tau }\).
3 Main Results
In this section, we first establish some sufficient criteria for global exponential synchronization of discontinuous drive-response CVRNNs (2.4) and (2.5) under the following state feedback controllers:
Theorem 3.1
Let \(f_{k}^{R}, f_{k}^{I}\in \mathscr {F}, k=1,2,\ldots ,n\), and Assumptions 1 and 2 hold. Then discontinuous response system (2.5) with the feedback controllers (3.1) can be globally exponentially synchronized with drive system (2.4), if there exist positive constants \(p_{j}^{R}, p_{j}^{I},q_{j}^{R},q_{j}^{I}(j=1,\ldots ,n)\) such that
and
where
and \(\varepsilon >0\).
Remark 3.1
In view of (3.2) and the continuity arguments, we can obtain that
Proof
Consider the following Lyapunov functional defined by
Calculate the upper right Dini-derivative of \(V_{1}(t)\) along the solutions of (2.6), we obtain
Now we estimate \( \mathbb {I}_{i}(i=1,\ldots ,8)\) term by term. Firstly, according to (2.7), we have
For \(\mathbb {I}_{2}\), one has
For \(\mathbb {I}_{3}\), we can also get from (2.7) that
For the fourth term \( \mathbb {I}_{4}\), we have
Similar to the estimations of \(\mathbb {I}_{i}\), \(\mathbb {I}_{4+i}(i=1,\ldots ,4)\) can be estimated as follows:
and
Moreover,
and
Inserting the above estimates (3.6)-(3.13) into (3.5), we deduce that
It follows from (3.3) and (3.14) that
that is, \(V_{1}(t)\) is a monotonically decreasing function. Then we have \(V_{1}(t)\le V(0)\).
On the other hand, it follows from (3.4) that
Furthermore,
Then, we have from (3.15) and (3.16) that
which gives
Then, according to Definition 2.2, the response system (2.5) with state feedback controllers (3.1) can be globally exponentially synchronized with discontinuous drive system (2.4). \(\square \)
If there is no differentiability imposed on the time delay, that is, if Assumption 2 does not hold, we can establish the following delay-independent synchronization criteria by constructing proper Lyapunov functional.
Theorem 3.2
Let \(f_{k}^{R}, f_{k}^{I}\in \mathscr {F}, k=1,2,\ldots ,n\), and Assumption 1 hold. Then the response system (2.5) is globally exponentially synchronized with the drive system (2.4) under the feedback controllers (3.1),
and \( \zeta _{1}>\zeta _{2}, \) where
and \(\zeta \) is the unique positive solution of the equation \(\zeta =\zeta _{1}-\zeta _{2}e^{\zeta \tau }\).
Proof
Consider the following Lyapunov functional defined by
Calculate the upper right Dini-derivative of \(V_{2}(t)\) along the solutions of (2.6), we can get by recalling the estimates in the proof of Theorem 3.1 that
It follows from Lemma 2.3 that
where \(\zeta \) is the unique positive solution of the equation \(\zeta =\zeta _{1}-\zeta _{2}e^{-\zeta t}\). Then, according to Definition 2.2, the response system (2.5) with state feedback controllers (3.1) can be globally exponentially synchronized with discontinuous drive system (2.4). \(\square \)
Remark 3.2
In recent years, various dynamical behaviors of CVNNs with continuous activations have been extensively investigated by many authors, see [14, 16,17,18,19,20] and the reference therein. However, exponential synchronization issue of delayed CVNNs with discontinuous activations has not yet been discussed in the existing literature. Thus, in this paper, to shorten up such a gap, we have analyzed a class of delayed CVRNNs with discontinuous activations. Some new sufficient criteria are established by the aid of theories of differential equations with discontinuous right-hand sides, and inequality techniques to ensure the exponential synchronization of the considered system. Moreover, it is admitted that the theoretical results established in Theorems 3.1 and 3.2 can be directly extended to the delayed CVRNNs in the continuous case by the same arguments which are utilized in above theorems.
4 A Numerical Example
To authenticate the effectiveness of the theoretical results in Sect. 3, let us consider the following example.
Example 4.1
For \(n=2\), the drive system (2.4) and the response system (2.6) of CVRNNs with the following parameters:
the discontinuous complex-valued activation function is:
The state feedback controllers are designed as:
and
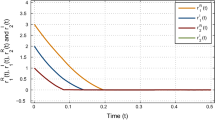
where \(e_{j}^{R}(t)=\tilde{x}_{j}(t)-x_{j}(t), e_{j}^{I}(t)=\tilde{y}_{j}(t)-y_{j}(t), j=1,2.\) It is readily seen that the activation function (4.1) satisfies (2.7) with \(\lambda _{k}^{RR}=1, \lambda _{k}^{RI}=0, \mu _{k}^{R}=2, \lambda _{k}^{IR}=0, \lambda _{k}^{II}=1, \mu _{k}^{I}=2, k=1,2.\) In addition, we take the initial conditions of (2.4) and (2.5) as \(z_{1}(s)=-\,4+\mathrm{i}, z_{2}(s)=2-4\mathrm{i}, \tilde{z}_{1}(s)=2-\mathrm{i}, \tilde{z}_{2}(s)=3+\mathrm{i}, s\in [-\,0.5, 0]\), respectively. One can easily verify that all the conditions in Theorem 3.1 hold. Therefore, we can conclude from Theorem 3.1 that drive system (2.4) and response system (2.5) are globally exponentially synchronized under the designed state feedback controllers (4.2)–(4.3). Figure 1 shows the state trajectories of synchronization errors \(e_{i}^{R}(t)\) and \(e_{i}^{I}(t), i=1,2\), respectively.

The real and imaginary parts of synchronization errors
It is easy to see from Fig. 1 that the systems (2.4) and (2.5) with the network parameters and the controller above are globally exponentially synchronized. This is in accordance with the conclusion of Theorem 3.1.
5 Conclusion
In this paper, based on the theories of differential inclusions, and inequality techniques, we have discussed the global exponential synchronization problem for delayed CVRNNs with discontinuous activations. Under the framework of drive-response scheme, by designing some novel state feedback controllers to the response system, new criteria have been established such that the drive CVRNNs globally exponentially synchronize with the response CVRNNs. Finally, a numerical example is presented to substantiate the effectiveness of the proposed theoretical results.
We would also like to point out that it is interesting and challenging to consider more different delays, such as infinitely distributed delay, leakage delays or proportional delays, and their effects on synchronization dynamics of CVNNs with discontinuities. Another interesting yet challenging problem is to study synchronization dynamics of reaction-diffusion CVNNs with discontinuities. These problems are our future research directions.
References
Gangal AS, Kalra PK, Chauhan DS (2007) Performance evaluation of complex valued neural networks using various error functions. Int J Electr Electron Sci Eng 5:41–46
Seow MJ, Asari VK, Livingston A (2010) Learning as a nonlinear line of attraction in a recurrent neural network. Neural Comput Appl 19:337–342
Forti M, Nistri P (2003) Global convergence of neural networks with discontinuous neuron activations. IEEE Trans Circuits Syst I(50):1421–1435
Forti M, Grazzini M, Nistri P et al (2006) Generalized Lyapunov approach for convergence of neural networks with discontinuous or non-Lipschitz activations. Physica D 214:88–99
Liu X, Cao J (2010) Robust state estimation for neural networks with discontinuous activations. IEEE Trans Syst Man Cybern 40:1425–1437
Duan L, Huang L, Guo Z (2016) Global robust dissipativity of interval recurrent neural networks with time-varying delay and discontinuous activations. Chaos 26(7):073101
Yang X, Song Q, Liang J et al (2015) Finite-time synchronization of coupled discontinuous neural networks with mixed delays and nonidentical perturbations. J Frankl Inst 352:4382–4406
Yang X, Ho DWC, Lu J et al (2015) Finite-time cluster synchronization of T–S fuzzy complex networks with discontinuous subsystems and random coupling delays. IEEE Trans Fuzzy Syst 23:2302–2316
Wu E, Yang X (2016) Adaptive synchronization of coupled nonidentical chaotic systems with complex variables and stochastic perturbations. Nonlinear Dyn 84:261–269
Duan L, Huang L, Guo Z (2014) Stability and almost periodicity for delayed high-order Hopfield neural networks with discontinuous activations. Nonlinear Dyn 77:1469–1484
Duan L, Wei H, Huang L (2018) Finite-time synchronization of delayed fuzzy cellular neural networks with discontinuous activations. Fuzzy Sets Syst. https://doi.org/10.1016/j.fss.2018.04.017
Hirose A (1992) Dynamics of fully complex-valued neural networks. Electron Lett 28:1492–1494
Jankowski S, Lozowski A, Zurada J (1996) Complex-valued multistate neural associative memory. IEEE Trans Neural Netw 7:1491–1496
Hu J, Wang J (2012) Global stability of complex-valued recurrent neural networks with time-delays. IEEE Trans Neural Netw Learn Syst 23:853–865
Qin S, Feng J, Song J et al (2018) A one-layer recurrent neural network for constrained complex-variable convex optimization. IEE Trans Neural Netw Learn Syst 29:534–544
Zhou B, Song Q (2013) Boundedness and complete stability of complex-valued neural networks with time delay. IEEE Trans Neural Netw Learn Syst 24:1227–1238
Zhang Z, Lin C, Chen B (2014) Global stability criterion for delayed complex-valued recurrent neural networks. IEEE Trans Neural Netw Learn Syst 25:1704–1708
Song Q, Zhao Z, Liu Y (2015) Stability analysis of complex-valued neural networks with probabilistic time-varying delays. Neurocomputing 159:96–104
Song Q, Yan H et al (2016) Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw 79:108–116
Li X, Rakkiyappan R, Velmurugan G (2015) Dissipativity analysis of memristor-based complex-valued neural networks with time-varying delays. Inform Sci 294:645–665
Hoppensteadt F, Izhikevich E (2000) Pattern recognition via synchronization in phase-locked loop neural networks. IEEE Trans Neural Netw 11:734–738
Mathiyalagan K, Park JH, Sakthivel R (2015) Synchronization for delayed memristive BAM neural networks using impulsive control with random nonlinearities. Appl Math Comput 259:967–979
Huang T, Chen G, Kurths J (2011) Synchronization of chaotic systems with time-varying coupling delays. Discrete Contin Dyn Syst B 16:1071–1082
Bao H, Park JH, Cao J (2016) Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw 81:16–28
Li X, Fang J, Li H (2016) Synchronization of complex-valued neural network with sliding mode control. J Frankl Inst 353:345–358
Ding X, Cao J, Alsaedi A et al (2017) Robust fixed-time synchronization for uncertain complex-valued neural networks with discontinuous activation functions. Neural Netw 90:42–55
Zhou C, Zhang W, Yang X et al (2017) Finite-time synchronization of complex-valued neural networks with mixed delays and uncertain perturbations. Neural Process Lett 46:271–291
Filippov A (1988) Differential equations with discontinuous right-hand sides. Kluwer Academic Publishers, Boston
Cortés J (2008) Discontinuous dynamical systems: a tutorial on solutions, nonsmooth analysis, and stability. IEEE Control Syst Mag 28:36–73
Cao J, Wang J (2004) Absolute exponential stability of recurrent neural networks with Lipschitz-continuous activation functions and time delays. Neural Netw 17:379–390
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was jointly supported by the National Natural Science Foundation of China (11701007, 11601143, 11771059), Natural Science Foundation of Anhui Province (1808085QA01), Key Program of University Natural Science Research Fund of Anhui Province (KJ2017A088, KJ2018A0082), China Postdoctoral Science Foundation (2018M640579), Key Program of Scientific Research Fund for Young Teachers of AUST (QN201605), Open Fund of Hunan Provincial Key Laboratory of Engineering Mathematics Modeling and Analysis (2018MMAEZD17), and the Doctoral Fund of AUST (11668).
Rights and permissions
About this article

Cite this article
Duan, L., Shi, M., Wang, Z. et al. Global Exponential Synchronization of Delayed Complex-Valued Recurrent Neural Networks with Discontinuous Activations. Neural Process Lett 50, 2183–2200 (2019). https://doi.org/10.1007/s11063-018-09970-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-018-09970-8