
Abstract
The target of this article is to study almost periodic dynamical behaviors for complex-valued recurrent neural networks with discontinuous activation functions and time-varying delays. We construct an equivalent discontinuous right-hand equation by decomposing real and imaginary parts of complex-valued neural networks. Based on differential inclusions theory, diagonal dominant principle and nonsmooth analysis theory of generalized Lyapunov function method, we achieve the existence, uniqueness and global stability of almost periodic solution for the equivalent delayed differential network. In particular, we derive a series of results on the equivalent neural networks with discontinuous activation functions, constant coefficients as well as periodic coefficients, respectively. Finally, we give a numerical example to demonstrate the effectiveness and feasibility of the derived theoretical results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, the connected neural networks have been widely investigated due to the successful applications in many fields, such as signal processing, pattern recognition, associative memories, complicated optimization [1–3]. These applications are mainly based on dynamical behaviors of neural networks. Therefore, it is extremely indispensable to analyze the dynamics of neural networks.
As a generalization of the real-valued neural networks, the states, connection weights and activation functions of the complex-valued neural networks are complex-valued. Generally, complex-valued neural networks have many differences and more complicated characteristics than real-valued ones. This becomes strongly required owing to their practical applications in physical networks dealing with light, ultrasonic and quantum [4, 5]. In fact, complex-valued neural networks (CVNNs) make it successful to solve many problems which cannot be dealt with their real-valued neural networks. For example, both the detection of symmetry problem and XOR problem can be handled with a single complex-valued neuron with the orthogonal decision boundaries [6], but cannot be solved with a single real-valued neuron. Consequently, it is extremely necessary to research the dynamical behaviors of complex-valued neural networks, especially the stability problems of complex-valued neural networks.
In the past few years, there have been many results on the stability of CVNNs, such as [7–16]. As we know, there have many applications of periodic oscillations in the recurrent neural networks, such as pattern recognition [17, 18], robot motion control [19] and machine learning [20, 21]. Therefore, it is very significant to research the existence and stability of periodic solutions for connected neural networks. We observed that the periodic parameters of dynamical system are often regarded as experienced uncertain perturbations. That is, parameters can be looked upon as a periodic small error. Under this circumstance, the almost periodic oscillatory behavior makes closer to reality. The almost periodic neural networks can be seemed as a natural generalization of the periodic neural networks. Compared with the almost periodic dynamics of real-valued neural networks, complex-valued are more complicated and suitable. However, to the best of our knowledge, almost periodic dynamics for complex-valued recurrent neural networks was seldom considered.
As we know, the activation functions play a vital part in the dynamical analysis of recurrent neural networks. Stability of neural networks depends heavily on the structures of activation functions. In recent years, there have been considered two kinds of activation functions for recurrent neural networks, that is, continuous activation functions and discontinuous activation functions, respectively. In real-valued neural networks, their activation functions are often selected to be smooth, bounded and even globally Lipschitz. In the complex domain, we know that every bounded entire function must be constant by Liouville’s theorem. Therefore, when complex-valued activation functions are entire and bounded, it must be a constant. It is obviously unsuitable. Therefore, activation functions are important problem for the complex-valued neural networks. In [8], Hu and Wang considered a class of continuous-time recurrent neural networks with two kinds of activation functions. Some criterions for existence, uniqueness and global stability of a unique equilibrium point are obtained. In [9], when activation functions can be decomposed into their real and imaginary parts, authors researched the asymptotical stability of delayed complex-valued neural networks. In [10], authors considered the asymptotical stability of complex-valued neural networks with constant delay. Moreover, the activation functions satisfy Lipschitz continuous in the complex domain. On the other hand, while handling with the dynamical systems having high-slope nonlinear elements, discontinuous activation functions often emerge in applications. For this, many researchers have been dedicated to investigate the dynamics for neural networks with discontinuous activation functions. However, almost periodic dynamics for delayed complex-valued recurrent neural networks with discontinuous activation functions was considered.
Unfortunately, time delays are usually inescapable in many physical, chemical and neural networks because of the limited switching speed of neuron amplifiers and propagation time, for example, pattern recognition, image processing, signal processing and associative memory. As everyone knows, time delays often have effect on the stability of neural network and may bring about instability. Thus, it is very important to study the dynamical behaviors of neural networks with time delays.
In the past few years, Hopfield neural networks with discontinuous activations have been received much attention, and many works obtained are concerned with equilibrium points [22–27], periodicity [28–30], almost periodicity [31–41] and many others. Considering the practical importance of almost periodic phenomenon, the stability of almost periodic solution for delayed, impulsive and discontinuous neural networks was proved by Allegretto et al. In [42], they considered the existence, uniqueness and global stability of the almost periodic solutions for delayed neural network with discontinuous activation functions. In [36], they studied the almost periodic dynamics for a class of delayed neural networks with discontinuous activation functions and give a condition that guarantee a stable almost periodic solution of the discontinuous network under the diagonal dominance principle. However, all discussions in these articles are main relay on the assumption that discontinuous activation functions are monotone nondecreasing. In [43], the authors discussed almost periodic solution of impulsive Hopfield neural networks. When the mixed delays neural network without global Lipschitz activation functions, paper [44] gives a stability sufficient condition of neural networks. Agarwal et al. researched almost periodic dynamics for impulsive delayed neural networks on almost periodic time scales, see [45].
Based on the above arguments, the almost periodic dynamical behaviors for delayed complex-valued recurrent neural networks with discontinuous activations functions are discussed. An equivalent discontinuous right-hand equation was constructed by decomposing real and imaginary parts of delayed complex-valued neural networks. The main intent of this article is to consider the dynamical behavior of complex-valued recurrent neural networks with discontinuous activation functions. Firstly, we give the existence of the almost periodic solution of the equivalent discontinuous right-hand equation under the framework of Filippov. Secondly, we obtain a condition that can guarantee the existence, the uniqueness and global exponential stability of the almost periodic solution of the discontinuous systems. Finally, when the connection strength is constant coefficients or periodic coefficients, the corresponding works will be obtained.
The rest of the article is structured as follows. In Sect. 2, some preliminaries, formulated and lemmas of complex-valued neural networks are presented. In Sect. 3, the uniqueness and global exponential stability of almost periodic solution of the dynamical system is obtained via some assumptions of the activation functions. Moreover, some corollaries with some specific cases are given. In Sect. 4, an example validates the validity of our results. At last, we come to some conclusions in Sect. 5.
Notations The notations are quite standard in this article. We denoted the solution of system (2a) and (2b) with \(Z(t,\phi ,\lambda )\). \(Z(t)=\left( z^{R}(t),z^{I}(t)\right) ^{T}\), where \(z^{R}(t)=\left( z_{1}^{R}(t),z_{2}^{R}(t),\ldots ,z_{n}^{R}(t)\right) ^{T}\), and \(z^{I}(t)=\left( z_{1}^{I}(t),z_{2}^{I}(t),\ldots ,z_{n}^{I}(t)\right) ^{T}, \gamma (t)=\left( \gamma ^{R}(t),\gamma ^{I}(t)\right) ^{T}\), where \(\gamma ^{R}(t)=\left( \gamma _{1}^{R}(t),\gamma _{2}^{R}(t),\ldots ,\gamma _{n}^{R}(t)\right) ^{T}\), and \(\gamma ^{I}(t)=\left( \gamma _{1}^{I}(t),\gamma _{2}^{I}(t),\ldots ,\gamma _{n}^{I}(t)\right) ^{T}\). \(\Vert Z(t)\Vert\) denote the 1-norm of vector \(Z=\left( z^{R},z^{I}\right) ^{T}\in R^{2n}: \Vert Z(t)\Vert =\sum _{j=1}^{n}\xi _{j}|z_{i}^{R}(t)|+\sum _{j=1}^{n}\phi _{j}|z_{i}^{I}(t)|\) where \(\xi _{j}, \phi _{j}>0, j=1,2,\ldots ,n\). \(B(x,\delta )\) denotes the open \(\delta -\)neighborhood of a set \(x\subset R^{n}: B(x,\delta )=\{y\in R^{n}:\inf_{z\in x}\Vert y-z\Vert <\delta \}\) for some \(\Vert \cdot \Vert ,\,C([0,T],R^{n})\), denote the spaces of continuous vector function, \(L^{1}([0,T],R^{n})\) represent square integrable vector function, and \(L^{\infty }([0,T],R^{n})\) denote essentially bounded function on [0, T]. \({\mathbb {Z}}\) denotes the integer; \(f'\) denotes the derivative of f.
2 Preliminaries
Consider complex-valued neural networks with asynchronous time delays and almost periodic coefficients described by the following nonlinear differential equations:
where \(j=1,2,\ldots , n, \ z_{j}(t)\in {\mathbb {C}}\) is the state of the jth neuron at \(t, d_{j}(t)>0\) represents the self-feedback connection weight, \(a_{jk}(t)\in {\mathbb {C}}\) is the connection strength of the kth neuron on the jth neuron; \(b_{jk}(t)\in {\mathbb {C}}\) is the delayed feedback of the kth neuron on the jth neuron with time-varying delay; \(u_{j}(t)\in {\mathbb {C}}\) denotes the external input to the jth neuron. \(\tau _\mathrm{jk}(t)\) is the time-varying transmission delay satisfying \(0\le \tau _{jk}(t)\le \tau\); \(f_{k}(\cdot ):{\mathbb {C}}\rightarrow {\mathbb {C}}\) denotes the nonlinear activation function which is supposed to satisfy the condition given:
Assumption 1
Let \(z=z^{R}+iz^{I}, f_{j}(z)\) can be expressed by its real and imaginary parts as \(f_{j}(z)=f_{j}^{R}(z^{R})+if_{j}^{I}(z^{I})\), where \(f_{j}^{R}(\cdot ),\ f_{j}^{I}(\cdot ): R\rightarrow R, f_{j}(z_{j})\) are continuous except on a finite number set of isolation points \(\left\{ \alpha _{k}^{j}:\alpha _{k}^{j}<\alpha _{k+1}^{j}, \ k\in {\mathbb {Z}}\right\}\), and \(\left\{ \beta _{k}^{j}:\beta _{k}^{j}<\beta _{k+1}^{j},\ k\in {\mathbb {Z}}\right\}\) on any compact interval of R, respectively, where the left and right limits satisfy \(f_{j}^{R-}\left( \alpha _{k}^{j}\right)<f_{j}^{R+}\left( \alpha _{k}^{j}\right) , f_{j}^{I-}\left( \beta _{k}^{j}\right) <f_{j}^{I+}\left( \beta _{k}^{j}\right)\);
Furthermore, the following assumption is made on the nonlinear activation function.
Assumption 2
\(f_{j}^{R}(\cdot )\) and \(f_{j}^{I}(\cdot )\) are monotonically nondecreasing and local Lipschitz except on a set of isolated points \(\left\{ \alpha _{k}^{j}\right\}\) and \(\left\{ \beta _{k}^{j}\right\}\), respectively. i.e., for any \(u, v\in \left( \alpha _{k}^{j}, \alpha _{k+1}^{j}\right)\) or \(\left( \beta _{k}^{j}, \beta _{k+1}^{j}\right)\), there exists positive constant \(L_{j}^{R}\), and \(L_{j}^{I}\) \(j=1,2,\ldots ,n\), such that \(\left| f_{j}^{R}(u)-f_{j}^{R}(v)\right| \le L_{j}^{R}|u-v|, \left| f_{j}^{I}(u)-f_{j}^{I}(v)\right| \le L_{j}^{I}|u-v|\).
Denote \(z_{j}(t)=z_{j}^{R}(t)+iz_{j}^{I}(t)\) with \(z_{j}^{R}(t)\) and \(z_{j}^{I}(t)\in R\), then network (1) can be replaced in the equivalent forms as shown:
The following assumptions are also required for systems (2a)–(2b).
Assumption 3
\(d_{j}(t), a_{jk}^{R}(t), a_{jk}^{I}(t), b_{jk}^{R}(t), b_{jk}^{I}(t), u_{j}^{R}(t), u_{j}^{I}(t), \tau _{jk}(t)\) are all continuous almost periodic functions in R. i.e., for any \(\varepsilon >0\), there exists \(l=l(\varepsilon )>0\) such that for any interval \([\alpha ,\alpha +l]\), there exists \(\omega \in [\alpha ,\alpha +l]\) such that
hold for all \(j,k=1,2,\ldots ,n\) and \(t\in R\).
Assumption 4
The delays \(\tau _{jk}(t)\) are continuous functions and satisfied with \(\tau '_{jk}(t)<1\) for \(j,k=1,2,\ldots ,n\). Moreover, there exist positive constants \(\xi _{j}, \phi _{j}\) and \(\delta\) such that \(d_{j}(t)>\delta >0, \Gamma _{j}(t)<0\) and \(\Upsilon _{j}(t)<0\).
where \(j=1,2,\ldots ,n\)
in which \(\varphi _{jk}^{-1}\) is the inverse function of \(\varphi _{jk}=t-\tau _{jk}(t), \tau _{jk}^{M}=\max _{1\le j, k\le n}\left\{ \tau _{jk}(t)\right\} \ j,k=1,2,\ldots ,n\).
First of all, the solution of delayed differential equations (2a)–(2b) with discontinuous right-hand side is defined in the sense of Filippov [46].
Definition 1
For given continuous functions \({\widetilde{\varphi }}_{k}(s)\) and \({\widehat{\varphi }}_{k}(s)\) defined on \([-\tau , 0]\) as well as the measurable functions \(\psi _{k}(s)\in {\overline{co}}\left[ f_{k}^{R}({\widetilde{\varphi }}_{k}(s))\right]\) and \({\widehat{\psi }}_{k}(s)\in {\overline{co}}\left[ f_{k}^{I}({\widehat{\varphi }}_{k}(s))\right]\) for almost all \(s\in [-\tau , 0]\), the absolute continuous function \(\left( z^{R}(t), z^{I}(t)\right)\) with \(z^{R}(t)=\left( z_{1}^{R}(t), z_{2}^{R}(t),\ldots , z_{n}^{R}(t)\right) ^{T}, z^{I}(t)=\left( z_{1}^{I}(t), z_{2}^{I}(t),\ldots , z_{n}^{I}(t)\right) ^{T}\) and \(z_{k}^{R}(s)={\widetilde{\varphi }}_{k}(s), z_{k}^{I}(s)={\widehat{\varphi }}_{k}(s)\) for all \(s\in [-\tau , 0]\) is said to be a solution of systems (2a)–(2b) on [0, T] if there exist measurable functions \(\gamma _{k}^{R}(t)\in {\overline{co}}\left[ f_{k}^{R}\left( z_{k}^{R}(t)\right) \right] , \gamma _{k}^{I}(t)\in {\overline{co}}\left[ f_{k}^{I}\left( z_{k}^{I}(t)\right) \right]\) for almost all \(t\in [0,T]\) such that
and \(\gamma _{k}^{R}(s)={\widetilde{\varphi }}_{k}(s), \gamma _{k}^{I}(s)={\widehat{\varphi }}_{k}(s)\) for almost all \(s\in [-\tau , 0]\), where \(k=1,2,\ldots ,n\).
Definition 2
Let \({\widetilde{Z}}(t)=\left( {\widehat{z}}_{1}^{R}(t), {\widehat{z}}_{2}^{R}(t),\ldots , {\widehat{z}}_{n}^{R}(t), {\widehat{z}}_{1}^{I}(t), {\widehat{z}}_{2}^{I}(t),\ldots , {\widehat{z}}_{n}^{I}(t)\right) ^{T}\) be a solution for systems (2a)–(2b), \({\widetilde{Z}}(t)\) is said to be globally exponentially stable, if for any solution \(Z(t)=\left( z^{R}(t),z^{I}(t)\right) ^{T}\) of systems (2a)–(2b), there exist constants \(M>0\) and \(\delta >0\) such that
As introduced by Fink [47] and He [48], the following concept of almost periodic solution is presented.
Definition 3
[36] A continuous function \(Z(t): R \rightarrow R^{2n}\) is said to be almost periodic in R, if for any \(\varepsilon >0\), it is possible to find a real number \(l=l(\varepsilon )>0\); for any interval with length \(l(\varepsilon )\), there exists a number \(\omega =\omega (\varepsilon )\) in this interval such that \(\Vert Z(t+\omega )-Z(t)\Vert <\varepsilon\) for all \(t\in R\).
The time derivative of the composed function \(V(q(t)):[0,+\infty )\rightarrow R\) can be calculated by a chain rule, where \(q(t):[0,+\infty )\rightarrow R^{n}\) is absolutely continuous on any compact interval \([0,+\infty )\).
Lemma 1
(Chain rule) [36] Assume that \(V(t):R^{n}\rightarrow R\) is C-regular, and that q(t) is absolutely continuous on any compact interval \([0,+\infty )\), then q(t) and \(V(q(t)):[0,+\infty )\rightarrow R\) are differential for a.e. \(\ t\in [0,+\infty )\), and we have
3 Main results
In this section, the existence of almost periodic solution of systems (2a)–(2b) was considered primarily. We applied with a suitable Lyapunov function so that some sufficient criteria are achieved to guarantee the existence of the almost periodic solution.
Lemma 2
Under Assumptions 1–4, there exists a solution \((Z,\gamma )\) of systems (2a)–(2b) on \([0,+\infty )\) for any given initial value, i.e., the solution Z of systems (2a)–(2b) is defined for \(t\in [0,+\infty )\) and \(\gamma\) is defined for \(t\in [0,+\infty )\) up to a set with measure zero. Moreover, there exists a constant \(M>0\) such that \(\Vert Z\Vert <M\) for \(t\in [-\tau ,+\infty )\) and \(\Vert \gamma \Vert <M\) for a.e. \(t\in [-\tau ,+\infty )\).
Proof
Define set-valued map as follows:
it is apparent that this set-valued map is upper semi-continuous with nonempty compact convex values, which implies that the local solution \(Z(t)=(z^{R}(t),\ z^{I}(t))^{T}\) of systems (2a)–(2b) obviously exists. That is to say that the initial valued problem of systems (2a)–(2b) has at least a solution \(Z(t)=\left( z^{R}(t),z^{I}(t)\right) ^{T}\) on [0, T) for some \(T\in (0,+\infty ]\).
Next, we will show that \(\lim \nolimits _{t\rightarrow T^{-}}\Vert Z(t)\Vert <+\infty\) if \(T<+\infty\), which means that the maximal existing interval of Z(t) can be extended to \(+\infty\). Construct a function as follows:
where
To calculate the derivative of V(t) along the solution trajectories of systems (2a)–(2b) in the sense of (3) by utilizing Lemma 1, one gets that
It follows from (5) and Assumption 4 that
where \({\widehat{u}}=\sup \limits _{t\ge 0}\Vert u(t)\Vert <+\infty\), which implies that
Combining the definition of V(t) and (6), one has
where \({\overline{M}}=V(0)+\frac{1}{\delta }{\widehat{u}}\), which shows that Z(t) is bounded on its existence interval \([-\tau ,T]\). Therefore, \(\lim _{t\rightarrow T^{-}}\Vert Z(t)\Vert <+\infty\), which means \(T=+\infty\). That is, systems (2a)–(2b) have a global solution for any initial values problem.
Moreover, we have
where \(M_{0}=V(0)+\frac{1}{\delta }\left( {\widehat{u}}_{j}^{R}+{\widehat{u}}_{j}^{I}\right) +\Vert \theta \Vert , \Vert \theta \Vert =\sup _{-\tau \le s\le 0}\left\{ \sum _{k=1}^{n}\xi _{k}\left| {\widetilde{\varphi }}(s)\left| +\sum _{k=1}^{n}\phi _{k}\right| {\widehat{\varphi }}(s)\right| \right\}\).
\(f_{j}^{R}\) and \(f_{j}^{I}\) have finite number of discontinuous points on any compact interval of R. In speciality, \(f_{j}^{R}\) and \(f_{j}^{I}\) have finite number of discontinuous points on compact interval \([-M_{0},M_{0}]\). Without loss of generality, we select discontinuous points \(\left\{ \alpha _{k}^{j}:k=1,2,\ldots ,l_{j}\right\}\) and \(\left\{ \beta _{k}^{j}:k=1,2,\ldots ,l_{j}\right\}\) for \(f_{j}^{R}\) and \(f_{j}^{I}\) on the interval \([-M_{0},M_{0}]\), respectively, and assume that \(-M_{0}<\alpha _{1}^{j}<\alpha _{2}^{j}<\cdots<\alpha _{l_{j}}^{j}<M_{0}, -M_{0}<\beta _{1}^{j}<\beta _{2}^{j}<\cdots<\beta _{l_{j}}^{j}<M_{0}\). Discuss a battery of continuous functions of \(f_{j}^{R}\) as follows:
where \(k=2,\ldots ,l_{j}-1\).
Denote
It is easy to see that
Similarly, consider a battery of continuous functions of \(f_{j}^{I}\):
where \(k=2,\ldots ,l_{j}-1\).
Denote
where
Similarly, one gets that
Note that \(\gamma _{j}^{R}(t)\in {\overline{co}}\left[ f_{j}^{R}\left( z_{j}^{R}(t)\right) \right]\) and \(\gamma _{j}^{I}(t)\in {\overline{co}}\left[ f_{j}^{I}\left( z_{j}^{I}(t)\right) \right]\) for \(\hbox {a.e.}\ t\in [-\tau ,+\infty ), \quad j=1,2,\ldots ,n\). Hence, \(\max \left\{ \left| \gamma _{j}^{R}(t)\right| , \left| \gamma _{j}^{I}(t)\right| \right\} \le \max \left\{ \left| M_{j}^{1}\right| , \left| m_{j}^{1}\right| , \left| M_{j}^{2}\right| , \left| m_{j}^{2}\right| \right\}\) for a.e. \(t\in [-\tau ,+\infty ), \quad j=1,2,\ldots ,n\), which implies that
Let
Hence, we have
The proof of Lemma 2 is complete.
Lemma 3
Suppose that Assumptions 1–4 hold, then any solution of systems (2a)–(2b) is asymptotically almost periodic, i.e., for any \(\varepsilon >0\), there exist \(T>0, l=l(\varepsilon )\) and \(\omega =\omega (\epsilon )\) in any interval \([\alpha ,\alpha +l]\) such that
for all \(t\ge T\).
Proof
Construct the following auxiliary functions:
In the light of Assumption 3 and the boundedness of Z(t) and \(\gamma (t)\), for any \(\varepsilon >0\), there exists \(l=l(\varepsilon )>0\) and at least one point \(\omega\) in any interval \([\alpha ,\alpha +l]\) satisfying the following inequalities:
where \(0<\xi \triangleq \min _{1\le j\le n}\le \Delta \triangleq \max _{1\le j\le n}\{\xi _{j}\}\). Hence, one has
and
Denoting \(X_{j}(t)=\left( x^{R}_{j}(t),x^{I}_{j}(t)\right) ^{T}\), with \(x^{R}_{j}(t)=z^{R}_{j}(t+\omega )-z^{R}_{j}(t)\) and \(x^{I}_{j}(t)=z^{I}_{j}(t+\omega )-z^{I}_{j}(t)\), then, one obtains that
and
Construct the following candidate function:
where
\(\square\)
By the similar way utilized in Lemma 2, and combining inequalities (8), (9), one has
Note that L(0) is a constant, then one can pick a sufficiently large \(T>0\) such that
Then,
Furthermore, we have
The proof of Lemma 3 is complete.
Theorem 1
Suppose that Assumptions 1–4 hold, then systems (2a)–(2b) have at least a almost periodic solution in the sense of (3).
Proof
Let \(Z(t)=\left( (z^{R}(t))^{T},(z^{I}(t))^{T}\right) ^{T}\) be any solution of system (3). Then one can select a sequence \(\{t_{k}\}_{k\in N}\) satisfying \(\lim _{k\rightarrow +\infty }t_{k}=+\infty\), and such that
and
where \(j=1,2,\ldots ,n, \varepsilon _{j}^{1}(t,t_{k}), \varepsilon _{j}^{2}(t,t_{k})\) are the auxiliary functions (7a) and (7b) defined. \(\square\)
It follows from Lemma 2 that there exists \(M^{*}>0\) such that \(|Z'_{j}(t)|\le M^{*}\) for \(a.e\ t\in [-\tau ,+\infty )\). Thus, the sequence \(\{Z(t+t_{k})\}_{k\in N}\) is equi-continuous and uniformly bounded. By the Arzela–Ascoli theorem and diagonal selection principle, we can choose a subsequence of \(\{t_{k}\}\) (denoted by \(\{t_{k}\}\)), such that \(Z(t+t_{k})\) converges uniformly to some absolutely continuous function \({\widehat{Z}}(t)\) on any compact interval [0, T].
Next, we claim that \({\widehat{Z}}(t)\) is an almost periodic solution of systems (2a)–(2b) in the sense of (3). Firstly, \({\widehat{Z}}(t)\) is a solution of system (2a)–(2b) in the sense of (3).
By Lebesgue’s dominated convergence theorem, for any \(t\in [-\tau ,+\infty )\), and \(l\in R\), one has
and
From (10) and (11), it is easy to conclude that
Therefore, \({\widehat{Z}}(t)\) is a solution of systems (2a)–(2b).
Secondly, we claim that \({\widehat{\gamma }}_{k}^{R}(t)\in {\overline{co}}\left[ f_{k}^{R}\left( {\widehat{z}}_{k}^{R}(t)\right) \right] , {\widehat{\gamma }}_{k}^{I}(t)\in {\overline{co}}\left[ f_{k}^{I}\left( {\widehat{z}}_{k}^{I}(t)\right) \right]\) for \(\hbox {a.e.}\ t\in [-\tau ,+\infty )\). Note that Z(t) uniformly converges to \({\widehat{Z}}(t)\) with respect to \(t\in [-\tau ,+\infty )\) and \({\overline{co}}\left[ f_{k}^{R}\right] , {\overline{co}}\left[ f_{k}^{I}\right]\) are upper semi-continuous set-valued map, for any \(\varepsilon >0\), there exists \(N>0\) such that \(f^{R}\left( z^{R}(t+t_{k})\right) \in B({\overline{co}}[f^{R}(z^{R}(t))],\varepsilon )\) for \(k>N\) and \(t\in [-\tau ,+\infty )\). Noting that \({\overline{co}}[f^{R}(z^{R}(t))]\) is convex and compact, then \(\gamma ^{R}(t)\in B({\overline{co}}[f^{R}(z^{R}(t))],\varepsilon )\), which implies \({\widehat{\gamma }}^{R}_{k}(t)\in B\left( {\overline{co}}\left[ f^{R}_{k}\left( z^{R}_{k}(t)\right) \right] ,\varepsilon \right)\) holds for any \(t\in [-\tau ,+\infty )\). Repeating the above method, we can prove \({\widehat{\gamma }}^{I}_{k}(t)\in B\left( {\overline{co}}\left[ f^{I}_{k}\left( z^{I}_{k}(t)\right) \right] ,\varepsilon \right)\). Because of the arbitrary of \(\varepsilon\), we know that \({\widehat{\gamma }}_{k}^{R}(t)\in {\overline{co}}[f_{k}^{R}({\widehat{z}}_{k}^{R}(t))], {\widehat{\gamma }}_{k}^{I}(t)\in {\overline{co}}[f_{k}^{I}({\widehat{z}}_{k}^{I}(t))]\) for \(\hbox {a.e.}\ t\in [-\tau ,+\infty )\).
Finally, \({\widehat{Z}}(t)=\left( {\widehat{z}}^{R}(t),{\widehat{z}}^{I}(t)\right)\) is an almost periodic solution of the neural network systems (2a)–(2b). By Lemma 3, For any \(\varepsilon >0\), there exist \(T>0\) and \(l=l(\varepsilon )\) such that any interval \([\alpha ,\alpha +l]\) contains an \(\omega\) such that
hold for all \(t\ge T\). Therefore, there exists sufficiently large constant \(K>0\) such that
holds for all \(k>K\) and \(t\in [-\tau ,+\infty )\). As \(k\rightarrow +\infty\), we can conclude that\(\Vert {\widehat{z}}(t+\omega )-{\widehat{z}}(t)\Vert <\varepsilon\) for all \(t\in [-\tau ,+\infty )\). This implies that \({\widehat{z}}(t)\) is an almost periodic solution of the neural network systems (2a)–(2b). The proof is complete.
Next, we will research the uniqueness and global exponential stability of the almost periodic solution obtained in Theorem 1 for the dynamical networks (2a)–(2b). By utilizing a generalization Lyapunov function, some sufficient criteria are gained to assure that networks have a uniqueness and global exponential stability almost periodic solution.
Theorem 2
Under Assumptions 1–4, then systems (2a)–(2b) have a unique almost periodic solution which is globally exponentially stable in the sense of (3).
Proof
Let Z(t) and \({\widehat{Z}}(t)\) be any two solutions of systems (2a)–(2b) associated with \(\gamma (t), {\widehat{\gamma }}(t)\) and initial value pairs \((\psi ,\mu ), ({\widehat{\psi }}, {\widehat{\mu }})\), respectively.
It follows from (3) that
Then, one has the following inequalities:
and
Construct the following candidate Lyapunov functions:
where
To calculate the derivative of W(t) with respect to t along the solution trajectories of systems (2a)–(2b) in the sense (3) of by applying Lemma 1, one obtains that
It follows from Assumption 4 that
Note that
It follows from (13) and (14) that one has
Let \(M=M(\psi ,\mu ,{\widehat{\psi }},{\widehat{\mu }})=W(0)\), then \(\Vert z(t)-{\widehat{z}}(t)\Vert \le M\hbox {e}^{-\delta t}\). Moreover, there exists an almost periodic solution for systems (2a)–(2b) in the sense of (3). Hence, one has
which implies that almost periodic solution \(Z^{*}(t)\) is globally exponentially stable. Finally, it should be pointed out that almost periodic solutions of system (2a)–(2b) are unique. Actually, assume that \(Z^{*}(t)\) and \(U^{*}(t)\) are two almost periodic solutions.
According to Levitan and Zhikov(1982), we conclude that if \(Z^{*}(t)\) and \(U^{*}(t)\) are two almost periodic functions satisfying (17), then \(Z^{*}(t)=U^{*}(t)\). Therefore, the almost periodic solution is unique. The proof is complete.
Finally, we study a specific case in the main theorem. Due to that periodic function can be regard as an almost periodic function, all fruits use to periodic case. Now, taking the place of Assumption 3, the following assumption holds. \(\square\)
Assumption 5
\(d_{j}(t), a_{jk}^{R}(t), a_{jk}^{I}(t), b_{jk}^{R}(t), b_{jk}^{I}(t), u_{j}^{R}(t), u_{j}^{I}(t), \tau _{jk}(t)\) are continuous functions in R. i.e., for any \(\varepsilon >0\), there exists \(l=l(\varepsilon )>0\) such that for any interval \([\alpha ,\alpha +l]\), there exists \(\omega \in [\alpha ,\alpha +l]\) such that
hold for all \(j,k=1,2,\ldots ,n\) and \(t\in R\).
According to Theorem 1 and Theorem 2, the following corollary is true.
Corollary 1
If assumptions 1, 2, 4, 5 are satisfied, then system (2a)–(2b) has a unique periodic solution, where it is globally exponentially stable.
Furthermore, a constant is a periodic function with any periodic. Therefore, the following complex-valued delayed neural networks are
Assumption 6
Assume that the delays \(\tau _{jk}(t)\) are continuous function and satisfying \(\tau '_{jk}(t)<1\) for \(j,k=1,2,\ldots ,n\). Moreover, there exist positive constants \(\xi _{j}, \phi _{j}\) and \(d_{j}>\delta >0\), such that \({\overline{\Gamma }}_{j}<0\) and \({\overline{\Upsilon }}_{j}<0, j=1,2,\ldots ,n\).
where
and \(\tau _{jk}^{M}(t)=\max \{\tau _{jk}(t)\}, \ j,k=1,2,\ldots ,n\).
The following corollary is also true.
Corollary 2
If Assumptions 1, 2, 6 are satisfied, then system (18) has a unique solution with any initial valued; moreover, system (18) has a unique equilibrium, where it is globally exponentially stable.
4 Numerical example
In this section, an example validates the validity of our results which is obtained in Theorem 1 and Theorem 2.
Example 1
Considering complex-valued dynamical networks constituting of two subnetworks as follows:
where the discontinuous activation functions are given as follows:
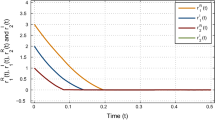
Obviously, \(f^{R}_{k}(\cdot ), f^{I}_{k}(\cdot )\) is local Lipschitz with Lipschitz constants \(L_{j}^{R}=L_{j}^{I}=0.01\). Observing that \(d_{1}(t)=d_{2}(t)=2, \tau _{jk}=0.1, a_{11}^{R}(t)=-0.5+0.01\sin \sqrt{2}t,\ a_{11}^{I}(t)=0.01\sin \sqrt{2}t,\ a_{12}^{R}(t)=-0.01,\ a_{12}^{I}(t)=-0.01,\ a_{21}^{R}(t)=0.01,\ a_{21}^{I}(t)=0.01,\ a_{22}^{R}(t)=-0.4,\ a_{22}^{I}(t)=-0.01\cos \sqrt{2}t,\ b_{11}^{R}(t)=-0.05+0.01\sin \sqrt{2}t,\ b_{11}^{I}(t)=0.01\sin \sqrt{2}t\), \(b_{12}^{R}(t)=-0.01,\ b_{12}^{I}(t)=-0.01,\ b_{21}^{R}(t)=0.01,\ b_{21}^{I}(t)=0.01,\ b_{22}^{R}(t)=-0.04\), \(b_{22}^{I}(t)=-0.01\cos \sqrt{2}t,\ u^{R}_{1}(t)=0.02\sin \sqrt{2}t+0.01\cos \sqrt{5}t,\ u^{I}_{1}(t)=0.02\sin \sqrt{2}t+0.01\cos \sqrt{5}t,\ u^{R}_{2}(t)=0.03\cos \sqrt{3}t-0.01\sin t,\ u^{I}_{2}(t)=0.03\cos \sqrt{3}t-0.01\sin t\) are satisfied with Assumption 3. Let \(\delta =0.01,\ \xi _{1}=\xi _{2}=\phi _{1}=\phi _{2}=1\), we have \(\Gamma _{1}<0,\ \Gamma _{2}<0, \Upsilon _{1}<0,\ \Upsilon _{2}<0\). According to Theorems 1 and 2, system (19) has a unique almost periodic solution, which is globally exponentially stable. The dynamics of system (19) are illustrated in Figs. 1, 2, 3, and 4, where we give five initial values of system (19).

Time-domain behavior of the state variable \(Rez_{1}\) for system (19) with five random initial conditions, \(\tau _{jk}(t)=0.1\)

Time-domain behavior of the state variable \(Imz_{1}\) for system (19) with three random initial conditions, \(\tau _{jk}(t)=0.1\)

Time-domain behavior of the state variable \(Rez_{2}\) for system (19) with three random initial conditions, \(\tau _{jk}(t)=0.1\)

Time-domain behavior of the state variable \(Imz_{2}\) for system (19) with three random initial conditions, \(\tau _{jk}(t)=0.1\)
Remark 1
When \(a_{jk}^{I}(t)=b_{jk}^{I}(t)=0\) and \(f_{k}(\cdot )\) are real functions, system (1) becomes a real-valued system as in [25]. In this paper, we firstly investigate the uniqueness and stability of almost periodic solution for delayed complex-valued recurrent neural networks with discontinuous activation functions. It is a special kind of discontinuous complex-valued activation functions in which real parts and imaginary parts are discontinuous. Therefore, complex-valued neural networks are more suitable than real-valued neural networks.
5 Conclusion
In the past decades, the theory framework of the discontinuous neural networks and its application was set up in practice. In this article, we propose the almost periodic solution of the complex-valued neural networks with discontinuous activations depending on the concept of Filippov solution. Under these assumptions, we proved the exponential convergence of the almost periodic solution using the diagonal dominant principle, 1-norm and nonsmooth analysis theory with generalized Lyapunov approach. We obtain the existence, uniqueness and global stability of almost periodic solution for the complex-valued neural networks. Finally, a numerical example demonstrates the effectiveness of our obtained theoretical results.
References
Liu D, Xiong X, DasGupta B, Zhang H (2006) Motif discoveries in unaligned molecular sequences using self-organizing neural networks. IEEE Trans Neural Netw 17(4):919–928
Rutkowski L (2004) Adaptive probabilistic neural networks for patter classification in time-varying environment. IEEE Trans Neural Netw 15(4):811–827
Xia Y, Wang J (2004) A general projection neural network for solving monotone variational inequalities and related optimization problems. IEEE Trans Neural Netw 15(2):318–328
Yang S, Guo Z, Wang J (2016) Global synchronization of multiple recurrent neural networks with time delays via impulsive interactions. IEEE Trans Neural Netw Learn Syst 15(2):318–328
Hirose A (1992) Dynamics of fully complex-valued neural networks. Eletron Lett 28(16):1492–1494
Jankowski S, Lozowski A, Zurada J (1996) Complex-valued multistate neural associative memory. IEEE Trans Neural Netw 7(6):1491–1496
Mathes JH, Howell RW (1997) Complex analysis for mathematics and engineering, 3rd edn. Jones and Bartlett Pub. Inc., Burlington
Hu J, Wang J (2012) Global stability of complex-valued recurrent neural networks with time-delays. IEEE Trans Neural Netw Learn Syst 23(6):853–865
Zhang ZY, Lin C, Chen B (2014) Global stability criterion for delayed complex-valued recurrent neural networks. IEEE Trans Neural Netw Learn Syst 25(9):1704–1708
Fang T, Sun JT (2014) Further investigate the stability of complex-valued neural networks with time-delays. IEEE Trans Neural Netw Learn Syst 25(9):1709–1713
Song Q, Zhao Z (2016) Stability criterion of complex-valued neural networks with both leakage delay and time-varying delays on time scales. Neurocomputing 171:179–184
Li X, Rakkiyappan R, Velmurugan G (2015) Dissipativity analysis of memristor-based complex-valued neural networks with time-varying delays. Inform Sci 294:645–665
Chen X, Song Q (2013) Global stability of complex-valued neural networks with both leakage time delay and discrete time delay on time scales. Neurocomputing 121:254–264
Liu X, Chen T (2016) Global exponential stability for complex-valued recurrent neural networks with asynchronous time delays. IEEE Trans Neural Netw Learn Syst 27(3):593–606
Gong W, Liang J, Cao J (2015) Matrix measure method for global exponential stability of complex-valued recurrent neural networks with time-varying delays. Neural Netw 70:81–89
Bai C (2009) Existence and stability of almost periodic solutions of Hopfield neural networks with continuously distributed delays. Nonlinear Anal 71(11):5850–5859
Wang D (1995) Emergent synchrony in locally coupled neural oscillators. IEEE Trans Neural Netw 6(4):941–948
Chen K, Wang D, Liu X (2000) Weight adaptation and oscillatory correlation for image segmentation. IEEE Trans Neural Netw 11(5):1106–1123
Jin H, Zacksenhouse M (2003) Oscillatory neural networks for robotic yo–yo control. IEEE Trans Neural Netw 14(2):317–325
Ruiz A, Owens DH, Townley S (1998) Existence, learning, and replication of periodic motion in recurrent neural networks. IEEE Trans Neural Netw 9(4):651–661
Toenley S, Ilchman A, Weiss M, Mcclement W, Ruiz A, Owens D, Ptatzel-Wolters D (2000) Existence and learning of oscillations in recurrent neural networks. IEEE Trans Neural Netw 11(1):205–214
Forti M, Nistri P (2003) Global convergence of neural networks with discontinuous neuron activations. IEEE Trans Circuits Syst I Fundam Theory Appl 50(11):1421–1435
Cortés J (2008) Discontinuous dynamical systems—a tutorial on solutions, nonsmooth analysis, and stability. IEEE Trans Control Syst Mag 28(3):36–73
Forti M (2007) M-matrices and global convergence of discontinuous neural networks. Int J Circuit Theor Appl 35(2):105–130
Huang L, Wang J, Zhou X (2009) Existence and global asymptotic stability of periodic solutions for Hopfield neural networks with discontinuous activations. Nonlinear Anal Real World Appl 10(3):1651–1661
Lu W, Chen T (2006) Dynamical behavior of delayed neural network systems with discontinuous activation functions. Neural Comput 18(3):683–708
Wu H (2009) Stability analysis of a general class of discontinuous neural networks with linear growth activation functions. Inform Sci 179(19):3432–3441
Huang L, Guo Z (2009) Global convergence of periodic solution of neural networks with discontinuous activation functions. Chaos Soliton Fract 42(4):2351–2356
Wu H, Shan C (2009) Stability analysis for periodic solution of BAM neural networks with discontinuous neuron activations and impulses. Appl Math Model 33(6):2564–2574
Manásevich R, Mawhin J, Zanolin F (1996) Periodic solutions of complex-valued differential equations and systems with periodic coefficients. J Differ Equ 126(2):355–373
Jiang H, Zhang L, Teng Z (2005) Existence and global exponential stability of almost periodic solution for cellular neural networks with variable coefficient and time-varying delays. IEEE Trans Neural Netw 16(6):1340–1351
Xia Y, Cao J, Huang Z (2007) Existence and exponential stability of almost periodic solution for shunting inhibitory cellular neural networks with impulses. Chaos Solitons Fract 34(5):1599–1607
Li Y, Fan X (2009) Existence and exponential stability of almost periodic solution for Cohen–Grossberg BAM neural networks with variable coefficients. Appl Math Model 33(4):2114–2120
Liu Y, You Z, Cao L (2006) On the almost periodic solution of generalized Hopfield neural networks with time-varying delays. Neurocomputing 69(13–15):1760–1767
Liu B, Huang L (2007) New results of almost periodic solutions for recurrent neural networks. J Comput Appl Math 206(1):293–305
Lu W, Chen T (2008) Almost periodic dynamics of a class of delayed neural networks with discontinuous activations. Neural Comput 20(4):1065–1090
Allegretto W, Papini D, Forti M (2010) Common asymptotic behavior of solutions and almost periodicity for discontinuous, delayed, and impulsive neural networks. IEEE Trans Neural Netw 21(7):1110–1125
Huang Z, Mohamad S, Feng C (2011) New results on exponential attractivity of multiple almost periodic solutions of cellular neural networks with time-varying delays. Math Comput Model 52(9–10):1521–1531
Duan L, Huang L, Guo Z (2014) Stability and almost periodicity for delayed high-order Hopfield neural networks with discontinuous activations. Donlinear Dyn 77(4):1469–1484
Wang D, Huang L (2014) Almost periodic dynamical behaviors for generalized Cohen–Grossberg neural networks with discontinuous activations via differential inclusions. Commun Nonlinear Sci Numer Simul 19(10):3857–3879
Li Y, Wu H (2009) Global stability analysis for periodic solution in discontinuous neural networks with nonlinear growth activations. Adv Differ Equ 2009. doi:10.1155/2009/798685
Qin S, Xue X, Wang P (2013) Global exponential stability of almost periodic solution of delayed neural networks with discontinuous activations. Inf Sci 220:367–378
Liu Y, Huang Z, Chen L (2012) Almost periodic solution of impulsive Hopfield neural networks with finite distributed delays. Neural Comput Appl 21(5):821–831
Zhou J, Zhao W, Lv X (2011) Stability analysis of almost periodic solutions for delayed neural networks without global Lipschitz activation function. Math Comput Simul 81(11):2440–2455
Wang C, Agarwal PR (2016) Almost periodic dynamics for impulsive delayed neural networks of a general type on almost periodic time scales. Commun Nonlinear Sci Numer Simul 36:238–251
Filippov A (1988) Differential equations with discontinuous right-hand side, mathematics and its applications. Kluwer, Boston
Fink AM (1974) “Almost periodic differential equations”, lecture notes in mathematics. Springer, Berlin
He C (1992) Almost periodic differential equation. Higher Education Publishing House, Beijing
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grant Nos. 61273012, 61403179, 61304023 and 61503171, in part by the Natural Science Foundation of Shandong Province of China under Grant Nos. ZR2014AL009, ZR2014CP008 and ZR2015FL021 and in part by the AMEP of Linyi University.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests regarding the publication of this article.
Rights and permissions
About this article

Cite this article
Yan, M., Qiu, J., Chen, X. et al. Almost periodic dynamics of the delayed complex-valued recurrent neural networks with discontinuous activation functions. Neural Comput & Applic 30, 3339–3352 (2018). https://doi.org/10.1007/s00521-017-2911-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-017-2911-1