
Abstract
A key issue in developing efficient numerical schemes for nonlinear wave equations is the energy-conserving. Most existing schemes of the energy-conserving are fully implicit and the schemes require an extra iteration at each time step and considerable computational cost for a long time simulation, while the widely-used q-stage (implicit) Gauss scheme (method) only preserves polynomial Hamiltonians up to degree 2q. In this paper, we present a family of linearly implicit and high-order energy-conserving schemes for solving nonlinear wave equations. The construction of schemes is based on recently-developed scalar auxiliary variable technique with a combination of classical high-order Gauss methods and extrapolation approximation. We prove that the proposed schemes are unconditionally energy-conserved for a general nonlinear wave equation. Numerical results are given to show the energy-conserving and the effectiveness of schemes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The paper focuses on developing linearly implicit and high-order energy-conserving schemes for a general nonlinear wave equation defined by
subject to homogeneous Dirichlet or homogeneous Neumann boundary conditions and the following initial conditions
where \(\Omega \) is a bounded domain in \({\mathcal R}^d\)\((d=1,2,3)\), \(\phi _0({x})\) and \(\phi _1({ x})\) are given initial conditions, and F(u) is a nonlinear smooth potential.
Nonlinear wave equations provide a powerful tool to model complicated natural phenomena in variety of scientific fields, such as solid state physics, nonlinear optics, and quantum field theory [4, 10, 18, 19, 44]. A remarkable feature of the wave Eq. (1.1) is its energy-conserving
For long time simulations, it is highly desirable that numerical algorithms can preserve the conservative structures of the corresponding systems in discrete analogs.
In the past several decades, numerous effort has been devoted to developing efficient energy-conserving numerical schemes for nonlinear wave equations. Explicit schemes are easier to be implemented, but less effective due to their conditional stability. The most popular numerical schemes for solving nonlinear wave equations in a long time period are fully implicit in general. Roughly speaking, the construction of implicit energy-conserving schemes can be divided into two categories. One is based on multi-step energy-conserving schemes with certain modification of the approximations to nonlinear term \(F'(\phi )\), see e.g., [24, 34, 41]. The other one is to reformulate the equations as an abstract Hamiltonian system and then, apply implicit schemes for the Hamiltonian system, such as the discrete gradient methods [30, 31, 42], the boundary-value methods [6, 7, 9] and the average vector field methods [14, 15, 35]. For a more detailed description of the energy-conserving schemes, we refer readers to the books [21, 45] and the references [8, 13, 20, 23, 26, 27, 40, 43, 46, 47]. Fully implicit schemes have shown their better performance than those explicit ones in the long time integrations due to the unconditional stability and conservation of schemes. However, these schemes require an extra iterative algorithm for solving a system of nonlinear equations at each time step, which leads to a considerable computational cost in the long time integrations.
Compared with fully nonlinear and implicit schemes, linearly implicit schemes are more attractive since the schemes only require the solution of a linear system at each time step. However, classical linearly implicit schemes may not be energy-conserved in general. Recently much attention has been paid to developing energy-stable linearly implicit schemes. Shen et al. [38] first proposed a linearly implicit scheme based on SAV approach for a parabolic type gradient flow equation with emphasis on the energy stability. Physically, the energy for this parabolic type equation does not increase as the time increases. In [38], authors proved that the SAV type scheme is energy-stable in the parabolic sense for the gradient flow model. Subsequent works can be found in [1, 11, 16, 28, 37, 39] for some different models. More recently, Cai and Shen presented a linearly implicit energy-conserving scheme for a Hamiltonian system of ODEs [12]. The construction is based on the invariant energy quadratization and the second-order time discrete approximations were studied. It is noted that nonlinear wave equations own different analytical properties. Some numerical schemes may be energy-stable for the gradient flow equation but not energy-conserved for nonlinear wave equations, e.g., the linearly implicit Euler method, the linearized two-step backward difference formula and the linearized Radau methods.
In the present paper, we present a family of high-order linearly implicit and energy-conserving schemes for solving the nonlinear wave equations. The main idea is as follows. First we introduce a scalar auxiliary variable and rewrite the nonlinear wave equation into a system of nonlinear equations. Then, the linearly implicit schemes are developed by combining the Gauss methods and some extrapolated techniques for nonlinear terms. The proposed schemes have the following advantages:
-
The schemes are linearly implicit. At each step, the schemes only require the solution of a linear system.
-
The schemes are generated with an arbitrary high-order accuracy in time direction and can be easily combined with existing approximations in spatial direction.
-
The proposed schemes are unconditionally energy-conserved for more general problems, while some fully implicit schemes ( Gauss methods, Hamiltonian boundary value methods and line integral methods) are energy-conserved only for polynomial type nonlinear systems.
The rest of papers are organized as follows. In Sect. 2, we propose a class of time-discrete schemes and prove the energy-conserving property of schemes for the nonlinear wave Eq. (1.1). Fully discrete schemes with classical FE approximations in spatial direction are presented in Sect. 3. In Sect. 4, we present two numerical examples to confirm the theoretical results. Finally, conclusions are presented in Sect. 5.
2 Discrete Schemes and Energy Conservation
In this section, we present our linearly implicit schemes based on the SAV approach as well as their energy-conserving property for the nonlinear wave Eq. (1.1).
2.1 Linearly Implicit Schemes
We denote
where \(C_0\) is a constant guaranteeing \(\int _{\Omega } F(\phi ) d{ x}+ C_0>0\) and rewrite (1.1) as
where \( w(\phi )=\frac{F'(\phi )}{\sqrt{G(\phi )}} \). Taking the inner product of Eq. (2.1) with \(\psi _t\) and Eq. (2.2) with \(-\phi _t\), multiplying both sides of Eq. (2.3) with respect to \(-2\eta \), and adding them together, we obtain immediately
Here \( E_s(\phi ,\psi ,\eta )=\Vert \psi \Vert +\Vert \nabla \phi \Vert +2\eta ^2\), where \(|| \cdot ||\) denotes the \(L^2\)-norm. Noting that \(\psi =\phi _t\) and \(\eta =\sqrt{\int _{\Omega } F(\phi ) d{ x}+ C_0}\), the modified and the original energy functional have the following relation
Let \(\tau :=T/N\) be the time step with N being a positive integer, \(t_n:=n\tau , n=0,\dotsc ,N,\) be a uniform partition of the time interval [0, T] and \(t_{ni}:=t_n+c_i\tau , i=1,\dotsc ,q, n=0,\dotsc ,N-1,\) be the internal Gauss nodes. Donote by \(\{\phi _n, \psi _n, \eta _n, \phi _{ni}, \psi _{ni}, \eta _{ni}\} \) numerical approximations to \(\{\phi (t_n, x), \psi (t_n, x), \eta (t_n, x), \phi (t_{ni}, x), \psi (t_{ni}, x), \eta (t_{ni}, x)\} \), respectively. Let \(\phi ^*_{ni}\) be a numerical approximation to \(\phi (t_{ni}, x)\), which will be given later in terms of some extrapolation technique.
Based on a q-stage Gauss method, we present a general semi-discrete numerical scheme for the system (2.1)–(2.3) by
With \(\phi _{ni}, \psi _{ni}, \psi _{ni}, \eta _{ni}\), \((\phi _{n+1},\psi _{n+1},\eta _{n+1})\) can be calculated by
In the above formulas, \(\bar{\psi }_{ni}\) is a temporary variable, which is introduced to simplify the formulations. \(\phi ^*_{ni}\) is an (explicit) extrapolation approximation to \(\phi (t_{ni}, x)\) of the order \(\mathcal {O}(\tau ^{q+1})\), which can be generated in the following way.
We denote by \(\phi _{n-1}^{\tau }(t)\) a Lagrange interpolation polynomial of degree at most q satisfying
and
Then, we define
Remark 2.1
The q-stage Gauss method can be viewed as a special class of Runge–Kutta methods, defined by the Butcher tableau
with \(c_1,\dotsc , c_q\in (0,1)\), satisfying the condition
For the more detailed description, we refer readers to the classical book [22].
Remark 2.2
As proved in [29, 33, 36], when q-stage fully implicit Gauss methods are applied to solve the nonlinear partial differential equations with the homogeneous Dirichlet or homogeneous Neumann boundary conditions, the attained order of convergence turns out to be at most \(q+1\). For this reason, here only the extrapolation with q internal nodes and one ending point in the previous time interval \([t_{n-1},t_{n}]\) is used. The extrapolation also provides the approximation of the order \(\mathcal {O}(\tau ^{q+1})\).
Remark 2.3
The proposed linearly implicit methods require the starting values \(\phi _{0i}, \psi _{0i}, \eta _{0i}\),
\(i=1,2,\cdots , q\), which can be obtained by the Gauss methods of the same stage. We shall show numerically and theoretically the energy-conserving property from \(n=1\).
Remark 2.4
For a Hamiltonian system of ODEs
where \(q(t)\in R^n, p(t)\in R^n \) and \(\mathcal {A}\) is a positive definite operator, we can introduce a scalar auxiliary variable
with which the above system can be rewritten by
where \( w(x)=\frac{F'(x)}{\sqrt{G(x)}}\), \(\langle \cdot \rangle \) denotes the inner product on [0, T], \(e=(1,1,\cdots ,1)^T\in R^n\) and \(C_0\) is a constant guaranteeing \(\langle F(q(t), e\rangle + C_0>0\). The proposed linearly implicit methods can be easily extended to the above system. One can show the energy-preserving of methods by following the proof in the present paper.
2.2 Energy Conservation
In this subsection, we show the unconditional energy-conserving property of the discrete schemes in (2.4)–(2.7). We define the time discrete energy by
where \(|| \cdot ||\) denotes the \(L^2\)-nom. Noting that \(\psi =\phi _t\) and \(\eta =\sqrt{\int _{\Omega } F(\phi ) d{ x}+ C_0}\), the discrete energy \(E_\tau (\phi _{n},\psi _n,\eta _n)-C_0\) is an approximation to the continuous energy E(t).
Theorem 1
The numerical solution defined in (2.4)–(2.7) preserves the energy
Proof
It follows from the first equation of (2.7) that
Taking the \(L^2\)-norm of both sides of the above equation yields
whee \((\cdot , \cdot )\) denotes the inner product on \(L^2(\Omega )\). Substituting \(\phi _n=\phi _{ni}-\tau \sum _{j=1}^q a_{ij} \psi _{nj}\) (Eq. (2.4)) into the second term on the right-hand side of the last equation, we obtain
where we have noted (2.9).
Again taking the \(L^2\)-norms of both sides of the second equation of (2.7) gives
Substituting \(\psi _n=\psi _{ni}-\tau \sum _{j=1}^q a_{ij} \bar{\psi }_{nj}\) (second equation of (2.5)) into the second term on the right-hand side of the above equation and noting (2.9), we obtain
Similarly, we have
Moreover, from the first equation of (2.5), we can see that
Finally, we substitute (2.15) into the last term on the right-hand side of (2.13), and add (2.12) and (2.13) tegother to get
which completes the proof. \(\square \)
3 Fully Discrete Schemes
Let \(\mathcal {T}_h\) be a quasi-uniform partition of \(\Omega \) into intervals \(T_i\) (\(i=1,\cdots ,N_x\)) in \(\mathbb {R}\), or triangles in \(\mathbb {R}^2\) or tetrahedra in \(\mathbb {R}^3\), \(\triangle x=\max _{1\le i \le N_x}\{\text {diam}\;T_i\}\) be the mesh size. Let \(V_h\) be the finite-dimensional subspace of \(H_0^1(\Omega )\), which consists of continuous piecewise polynomials of degree r (\(r\ge 1\)) on \(\mathcal {T}_h\).
For given \(\psi _h^n, \phi _h^n \in V_h\) and \(\varvec{\eta }_0^n \in \mathbb {R}\), the Finite element solutions \( \psi _{hj}^n, \bar{\psi }_{hj}^n, \phi _{ji}^n, \phi ^n_h, \psi ^n_h \in V_h\), \(j=1,2,\ldots ,q\) and \(\eta _h^{n+1}\in \mathbb {R}\), satisfy the system
and \(\phi ^{n*}_{hi}\) is an (explicit) extrapolation approximation to \(\phi (t_{ni}, x)\) (The extrapolation is similar to that in the previous section).
Let \(\{ \alpha _i(x) \}_{i=1}^{N_x}\) be a base of \(V_h\) and
Then in a matrix form, the above system can be rewritten by
where \(\otimes \) denotes the kronecker product, \(A=(a_{ij})_{q \times q}\), \(b=(b_1,b_2,\cdots ,b_q)^T\), \(I_{p}\) denotes the \(p \times p\) identity matrix with \(p=q\) or \(N_x\), M and S define the mass matrix and stiffness matrix, respectively, \(\varvec{\Psi }^n, \varvec{\Phi }^n, \bar{\varvec{\Psi }}^n \in {\mathbb R}^{qN_x}\) and \(\varvec{\eta }^n \in {\mathbb R}^q\),
and \(w_{ij}^n = ((w(\phi _{nj}^*), \alpha _i)\).
Remark 3.1
The fully discrete scheme is energy-conserving, i.e., \(E_{\tau }(\phi _h^{n+1}, \psi _h^{n+1}, \eta _h^{n+1})=E_{\tau }(\phi _h^{n}, \psi _h^{n}, \eta _h^{n})\), where
The proof is similar to that in the previous section by multiplying both sides of Eqs. (3.5) and (3.6) by the matrices S and M, respectively.
From (3.1) and (3.2) and noting \(A \otimes M = (A \otimes I)(I_q \otimes M)\) where I denotes the \(N_x \times N_x\) identity matrix, we have
and by (3.3),
Moreover, by (3.4),
Finally, we have the system
where
The eigenvalue of the matrix \(\mathbf{B}\) can be written by
where \(\lambda _\mathbf{B}, \lambda _A, \lambda _{M,S}\) denote the eigenvalue of \(\mathbf{B}, A, M^{-1}S\), respectively. Since both the matrices M and S are symmetric positive definite, \(\lambda _{M,S} >0\). A straightforward calculation shows that
where \(\lambda _0\) is a constant. Then there exists \(\tau _0>0\), \(|\lambda _\mathbf{B}| \ne 0\) when \(\tau \le \tau _0\) and the system (3.8) has a unique solution. Therefore, at each time step, the finite element system defined in (3.1)–(3.4) has a unique solution \(\varvec{\Psi }^n, \varvec{\Phi }^n, \eta ^n\).
4 Numerical Simulation
In this section, we present three numerical examples to confirm the theoretical findings. Numerical computations are performed in Matlab for a 1D problem and by Freefem for a 2D problem.
To test the energy-conserving property of methods, at each time step we calculate the discrepancies of the discrete energy
For comparison, we also apply the standard q-stage Gauss method (GM) and the q-stage linearized Gauss method (LGM) to the problem
The same spatial approximations as in our proposed method are used together with these two time discrete schemes. The corresponding discrete energy and the energy change are also calculated. Since the standard GM is fully implicit, the Newton iterative algorithm is applied for solving the system of nonlinear equations at each time step, in which the convergence tolerance for the standard Newton algorithm is \(10^{-13}\). Also the extrapolation technique with \(q+1\) points is applied in the approximation to nonlinear terms in the LGM.
Example 1
In the first example, we consider the following 1D Klein-Gordon equation
with homogeneous Dirichlet boundary conditions and the following initial conditions
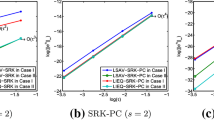
We solve this equation by the proposed method with a piecewise linear finite element approximation in spatial direction and the energy conserving schemes in time direction, where we take \(\triangle x=\pi /256\) and \(\tau = 1/40, 1/60, 1/80,1/100\), respectively. Since no exact solution is available, we take the numerical solution obtained by using the temporal stepsize \(\tau =1/2560\) as the reference solution. The maximum numerical errors and convergence orders for \(q=2,3,4\) are presented in Table 1. It can be seen from Table 1 that the q-stage SAV GM has the \(q+1\)-order convergence rate in the temporal direction.
To test the energy-conserving property of methods, we solve the equation by these three type methods, q-stage GM, q-stage LGM and the proposed q-stage SAV GM in the time interval [0, 100] and calculate the discrete energy \(E_{\tau }(\phi _h^n, \psi _h^n, \eta _h^n)\) and the energy discrepancies \(D_n\) at each time step. We present in Figs. 1, 2 and 3 the energy discrepancies with different methods. One can observe that for GM and LGM, the discrepancies \(D_n\) of the discrete energy changes with different temporal stepsizes. While for SAV-GM, the discrepancies \(D_n\) are the order of the machine precision. There results confirm the energy-conserving properties of the SAV GM methods.

Two-stage methods with \(M=20\) (left) and \(M=40\) (right) for Eq. (4.1)

Three-stage methods with \(M=24\) (left) and \(M=48\) (right) for Eq. (4.1)

Four-stage methods with \(M=10\) (left) and \(M=20\) (right) for Eq. (4.1)

Two-stage methods with \(M=20\) (left) and \(M=40\) (right) for Eq. (4.2)

Three-stage methods with \(M=20\) (left) and \(M=40\) (right) for Eq. (4.2)

Four-stage methods with \(M=10\) (left) and \(M=20\) (right) for Eq. (4.2)

Numerical simulation of the 2D SG Eq. (4.3) with ICs (i)

Numerical simulation of the 2D SG Eq. (4.3) with ICs (ii)

GMs (left) and SAV-GMs (right) for the 2D SG Eq. (4.3) with ICs (i)

GMs (left) and SAV-GMs (right) for the 2D SG Eq. (4.3) with ICs (ii)
Example 2
In the second example, we consider the following 1D nonlinear wave equation
with homogeneous Dirichlet boundary conditions and the following initial conditions
The equation arises from Johnson–Mehl–Avrami–Kolmogorov theory, which characterizes the growth phenomenon of nuclei and the nucleation [2, 25, 43]. We still solve the equation by using two-, three- and four-stage GM, LGM and the proposed SAV GM, respectively. The discrepancies \(D_n\) of the discrete energy are shown in Figs. 4, 5 and 6 for various stepsizes. We can see that the discrepancies of the discrete energy changed for both GMs and LGMs with different stepsizes. In contrast, the ones for SAV GMs with different stepsizes are sufficiently small and remain nearly unchanged. The results further confirm the theoretical findings in the present paper.
Example 3
We consider the 2D Sine-Gorden(SG) equation
with homogeneous Neumann boundary conditions, where \(\Omega \) is a unit circle. The following two type initial conditions (ICs) will be tested.
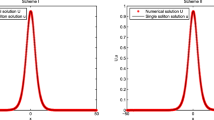
The SG equation with the initial conditions (4.4)–(4.5) was investigated by many authors, e.g., see [3, 5, 17], to study the behavior of ring solitons and the superposition of line solitons. Here, we solve the SG equation by the proposed energy-conserving method and the 2-stage GM, respectively, with a quadratic finite element approximation in spatial direction. A quasi-uniform triangulation is made by FreeFEM++ with M nodes uniformly distributed on the boundary of the circular domain and a uniform partition with \(\tau = 1/N\) is made in time direction. We solve numerically the problem two different initial solutions defined in (4.4-(4.5) by setting \(M=N=20\) . The numerical results are presented in Figs. 7 and 8, respectively. From Fig. 7, we can see that with ring solitons at the beginning, the solitons shrink (\(t=2\)) and expand (\(t=4\)) as the time increases. At the meanwhile, some oscillations at the boundary occur at \(t=4\) and \(t=6\) and then, disappear at \(t=8\). Finally. two ring solitons can be observed at \(t=10\). With the initial condition (4.5), we can see from Fig. 8 that the numerical solutions behave like line solitons at the beginning (\(t=0\)) and then, more line type solitons appear around the boundary (\(t=2\)). These line solitons move from lower-left to upper-right and change their shapes as the time increases (\(t=4,t=6,t=8\) and \(t=10\)).
Moreover, we present in Figs. 9 and 10 the discrete energy discrepancies \(D_n\) for the problem with different stepsizes and initial conditions given in (4.4) and (4.5). It can be observed clearly that the energy discrepancies \(D_n\) of the GM increases dramatically for the problem with the initial condition (i) for both \(\tau =0.1, 0.05\), while for the second initial condition the energy change increase quickly for \(\tau =0.1\) and is stably around \(0.1--0.2\) for \(\tau =0.05\). Generally speaking, GM is not energy-conserved for the SG equation since it is not a polynomial type Hamiltonian. Meanwhile, the SAV GM show extremely good performance in the energy conserving. The energy discrepancies \(D_n\) is constantly in the scale of \(10^{-12}\), which shows that the proposed SAV GM schemes own the energy-conserving property for more general cases and which further confirms our theoretical results.
5 Conclusions
We have proposed a family of linearly implicit numerical schemes for solving the nonlinear wave equations. It is shown theoretically and numerically that the proposed schemes are unconditionally energy-conserved for more general models and the schemes are of arbitrarily high-order accuracy. Numerical results on nonlinear wave equations are given to confirm the effectiveness of the methods. The present paper brings a navel way to find high-order energy-conserving numerical methods, while based on the SAV approach, we believe more linearly implicit and energy-conserving numerical methods can be developed for solving the nonlinear wave equations. At present, there are some convergence results on SAV time discretization for parabolic problems, e.g, [1, 37]. It is possible to extend the analysis to the nonlinear wave equations. However, spatial discretization of the partial differential equations yields a stiff ODE system. As pointed out in [29, 32, 33, 48], the coefficients of the asymptotic error expansions of Runge–Kutta methods or other higher-order methods depend on stiffness of the problems and order reduction may appear. Therefore, a careful analysis is highly required. We leave the problem to the future work.
References
Akrivis, G., Li, B., Li, D.: Energy-decaying extrapolated RK-SAV methods for the Allen–Cahn and Cahn–Hilliard equations. SIAM J. Sci. Comput. 41, A3703–A3727 (2019)
Avrami, M.: Kinetics of phase change: I general theory. J. Chem. Phys. 7(12), 1103–1112 (1939)
Argyris, J., Haase, M., Heinrich, J.C.: Finite element approximation to two-dimensional sine-Gordon solitons. Comput. Methods Appl. Mech. Eng. 86, 1–26 (1991)
Biswas, A.: Soliton perturbation theory for phi-four model and nonlinear Klein–Gordon equations. Commun. Nonlinear Sci. Numer. Simul. 14, 3239–3249 (2009)
Bratsos, A.G.: The solution of the two-dimensional sine-Gordon equation using the method of lines. J. Comput. Appl. Math. 206, 251–277 (2007)
Brugnano, L., Caccia, G.F., Iavernaro, F.: Energy conservation issues in the numerical solution of the semilinear wave equation. Appl. Math. Comput. 270, 842–870 (2015)
Brugnano, L., Iavernaro, F., Trigiante, D.: Hamiltonian boundary value methods (energy preserving discrete line integral methods). J. Numer. Anal. Ind. Appl. Math. 5, 17–37 (2010)
Brugnano, L., Montigano, J.I., Rández, L.: High-order energy-conserving line-integral methods for charged particle dynamics. J. Comput. Phys. 396, 209–227 (2019)
Brugnano, L., Zhang, C., Li, D.: A class of energy-conserving Hamiltonian boundary value methods for nonlinear Schrödinger equation with wave operator. Commun. Nonlinear Sci. Simul. 60, 33–49 (2018)
Brenner, P., van Wahl, W.: Global classical solutions of nonlinear wave equations. Math. Z. 176, 87–121 (1981)
Cai, W., Jiang, C., Wang, Y., Song, Y.: Structure-preserving algorithms for the two-dimensional sine-Gordon equation with Neumann boundary conditions. J. Comput. Phys. 395, 166–185 (2019)
Cai, J., Shen, J.: Two classes of linearly implicit local energy-preserving approach for general multi-symplectic Hamiltonian PDEs. J. Comput. Phys. 401, 108975 (2020)
Cao, W., Li, D., Zhang, Z.: Optimal superconvergence of energy conserving local discontinuous Galerkin methods for wave equations. Commun. Comput. Phys. 21, 211–236 (2017)
Celledoni, E., McLachlan, R.I., McLaren, D.I., Owren, B., Quispel, G.R.W., Wright, W.M.: Energy-preserving Runge–Kutta methods. ESAIM: Math. Model. Numer. Anal. 43, 645–649 (2009)
Celledoni, E., Owren, B., Sun, Y.: The minimal stage, energy preserving Runge–Kutta method for polynomial Hamiltonian systems is the averaged vector field method. Math. Comput. 83, 1689–1700 (2014)
Cheng, Q., Shen, J., Yang, X.: Highly efficient and accurate numerical schemes for the epitaxial thin film growth models by using the SAV Approach. J. Sci. Comput. 78, 1467–1487 (2019)
Christiansen, P.L., Lomdahl, P.S.: Numerical solutions of 2 + 1 dimensional sine-Gordon solitons. Phys. D 2, 482–494 (1981)
Dodd, R.K., Eilbeck, I.C., Gibbon, J.D., Morris, H.C.: Solitons and Nonlinear Wave Equations. Academic, London (1982)
Drazin, P.J., Johnson, R.S.: Solitons: An Introduction. Cambridge University Press, Cambridge (1989)
Duncan, D.B.: Symplectic finite difference approximations of the nonlinear Klein–Gordon equation. SIAM J. Numer. Anal. 34, 1742–1760 (1997)
Hairer, E., Lubich, C., Wanner, G.: Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd edn. Springer, Berlin (2006)
Hairer, E., Norsett, S.P., Wanner, G.: Solving Ordineary Differential Equations II, Stiff and Differential-Algebraic Problems. Springer, Berlin (2006)
Jiang, C., Cai, W., Wang, Y.: A linearly implicit and local energy-preserving scheme for the Sine-Gordon equation based on the invariant energy quadratization approach. J. Sci. Comput. 80, 1629–1655 (2019)
Jimenez, S., Vazquez, L.: Analysis of four numerical schemes for a nonlinear Klein–Gordon equation. Appl. Math. Comput. 35, 61–94 (1990)
Johnson, W., Mehl, R.: Reaction kinetics in processes of nucleation and growth. Trans. AIME 135, 416–442 (1939)
Li, Z., Tang, Y., Lei, H., Caswell, B., Karniadakis, G.E.: Energy-conserving dissipative particle dynamics with temperature-dependent properties. J. Comput. Phys. 265, 113–127 (2014)
Li, S., Vu-Quoc, L.: Finite difference calculus invariant structure of a class of algorithms for the nonlinear Klein–Gordon equation. SIAM J. Numer. Anal. 32, 1839–1875 (1995)
Li, J., Zhao, J., Wang, Q.: Energy and entropy preserving numerical approximations of thermodynamically consistent crystal growth models. J. Comput. Phys. 382, 202–220 (2019)
Lubich, C., Ostermann, A.: Runge–Kutta approximation of quasi-linear parabolic equations. Math. Comput. 64, 601–627 (1995)
McLachlan, R.I., Quispel, G.R., Robidoux, N.: Geometric integration using discrete gradient. Philos. Trans. R. Soc. Lond. Ser. A 357, 1021–1045 (1999)
McLachlan, R.I., Quispel, G.R.: Discrete gradient methods have an energy conservation law. Discrete Contin. Dyn. Syst. 34, 1099–1104 (2014)
Ostermann, A., Roche, M.: Runge-Kutta methods for partial differential equations and fractional Orders of Convergence. Math. Comput. 59, 403–420 (1992)
Ostermann, A., Thalhammer, M.: Convergence of Runge–Kutta methods for nonlinear parabolic equations. Appl. Numer. Math. 42, 367–380 (2002)
Pascual, P.J., Jiménez, S., Vázquez, L.: Numerical simulations of a nonlinear Klein–Gordon model. In: Applications. Computational Physics, Granada, 1994, Lecture Notes in Physics, vol. 448, Springer, Berlin, 1995, pp. 211–270
Quispel, G.R., McLaren, D.I.: A new class of energy-preserving numerical integration methods. J. Phys. A 41, 045206 (2008)
Sanz-Serna, J.M., Verwer, J.G., Hundsdorfer, W.H.: Convergence and order reduction of Runge–Kutta schemes applied to evolutionary problems in partial differential equations. Numer. Math. 50, 405–418 (1986)
Shen, J., Xu, J.: Convergence and error analysis for the scalar auxiliary variable (SAV) schemes to gradient flows. SIAM J. Numer. Anal. 56, 2895–2912 (2018)
Shen, J., Xu, J., Yang, J.: The scalar auxiliary variable (SAV) approach for gradient flows. J. Comput. Phys. 353, 407–416 (2018)
Shen, J., Xu, J., Yang, J.: A new class of efficient and robust energy stable schemes for gradient flows. SIAM Rev. 61(3), 474–506 (2019)
Song, F., Karniadakis, G.E.: Fractional magneto-hydrodynamics: algorithms and applications. J. Comput. Phys. 378, 44–62 (2019)
Strauss, W.A., Váquez, L.: Numerical solution of a nonlinear Klein–Gordon equation. J. Comput. Phys. 28, 271–278 (1978)
Wang, B., Wu, X.: The formulation and analysis of energy-preserving schemes for solving high-dimensional nonlinear Klein–Gordon equations. IMA J. Numer. Anal. 39, 2016–2044 (2019)
Wang, L., Chen, W., Wang, C.: An energy-conserving second order numerical scheme for nonlinear hyperbolic equation with an exponential nonlinear term. J. Comput. Appl. Math. 280, 347–366 (2015)
Wazwaz, A.M.: New travelling wave solutions to the Boussinesq and the Klein–Gordon equations. Commun. Nonlinear Sci. Numer. Simul. 13, 889–901 (2008)
Wu, X., Liu, K., Shi, W.: Structure-Preserving Algorithms for Oscillatory Differential Equations II. Springer, Heidelberg (2015)
Wu, X., Wang, B., Shi, W.: Efficient energy preserving integrators for oscillatory Hamiltonian systems. J. Comput. Phys. 235, 587–605 (2013)
Zhang, C., Wang, H., Huang, J., Wang, C., Yue, X.: A second order operator splitting numerical scheme for the “good” Boussinesq equation. Appl. Numer. Math. 119, 179–193 (2017)
Zhou, B., Li, D.: Newton linearized methods for semilinear parabolic equations. Numer. Math. Theor. Meth. Appl. 13(4), 928–945 (2020)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported in part by the National Natural Science Foundation of China (NSFC) under Grant Nos. 11771162, 11971010 and a Grant from the Research Grants Council of the Hong Kong Special Administrative Region, China (Project CityU 11302519).
Rights and permissions
About this article

Cite this article
Li, D., Sun, W. Linearly Implicit and High-Order Energy-Conserving Schemes for Nonlinear Wave Equations. J Sci Comput 83, 65 (2020). https://doi.org/10.1007/s10915-020-01245-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-020-01245-6