
Abstract
The question of how methods from the field of artificial intelligence can help improve the conventional frameworks for topology optimisation has received increasing attention over the last few years. Motivated by the capabilities of neural networks in image analysis, different model-variations aimed at obtaining iteration-free topology optimisation have been proposed with varying success. Other works focused on speed-up through replacing expensive optimisers and state solvers, or reducing the design-space have been attempted, but have not yet received the same attention. The portfolio of articles presenting different applications has as such become extensive, but few real breakthroughs have yet been celebrated. An overall trend in the literature is the strong faith in the “magic”of artificial intelligence and thus misunderstandings about the capabilities of such methods. The aim of this article is therefore to present a critical review of the current state of research in this field. To this end, an overview of the different model-applications is presented, and efforts are made to identify reasons for the overall lack of convincing success. A thorough analysis identifies and differentiates between problematic and promising aspects of existing models. The resulting findings are used to detail recommendations believed to encourage avenues of potential scientific progress for further research within the field.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Topology Optimisation (TO) is a mathematical approach to mechanical and multiphysics design aimed at maximising structural performance. Spatial optimisation of the distribution of material within a defined domain subject to sets of physical and geometric constraints, effectively increases the design freedom compared to other design approaches. Since the introduction of the homogenisation approach for topology optimisation (Bendsøe and Kikuchi 1988), the field has become an increasingly popular academic field as well as a practical design tool for industry, also fuelled by the developments in Additive Manufacturing (AM) permitting production of more complex features to better exploit the increased design freedom gained from TO. While the homogenisation approach demonstrated the promise of TO, it was considered to consist of complex operations and resulted in indistinct blurry optimised designs. Therefore, the SIMP (Solid Isotropic Material with Penalisation) approach (Bendsøe 1989; Zhou and Rozvany 1991) soon became the preferred method. This approach considers the relative material-density in each element of the Finite Element (FE) mesh as design variables, allowing for a simpler interpretation and optimised designs with more clearly defined features. Later, alternative approaches to TO emerged, among others, evolutionary algorithms (Xie and Steven 1997), the level-set method (Allaire et al. 2002; Wang et al. 2003), feature-mapping methods (Norato et al. 2004; Guo et al. 2018; Wein et al. 2020) and stochastic metaheuristics such as Simulated Annealing (SA) and Genetic Algorithms (GA). The latter non-gradient based TO algorithms have been proven inefficient and intractable for practical problems (Sigmund 2011).
Common for the implementation of the different solution methods is that they use an iterative procedure to create a complex mapping from problem-defining characteristics (i.e. supports, loads and objective function) to an optimised structure. To ensure coherence with laws of physics the structure is governed by a system of partial differential equations. As the considered approach to TO is based on nested analysis and design, this system of equations must be solved for the intermediate solution in each iterate of these procedures. For problems increasing in size and complexity obtaining this solution becomes a highly computationally expensive process posing a challenge in large-scale topology optimisation. As accuracy and obtained detail of solutions are highly dependent upon the element size in FE-analysis, the applicability of topology optimisation for real-life design cases is limited by this computational complexity. Therefore, current developments within the field are strongly motivated by the desire to either limit the number of iterations needed to obtain an optimised structure or the computational cost of completing an iteration.
The technological development in high-performance computing has not only provided important support in the progress of topology optimisation, but also in other increasingly popular research fields such as Artificial Intelligence (AI). Especially prominent is the growth within the field of Machine Learning (ML) and its subfield Deep Learning (DL), offering promising capabilities in pattern recognition and approximation of complex relations. Machine learning is roughly a collection of model-frameworks for applied function approximations when explicit descriptions of input-target mappings are difficult or impossible (Goodfellow et al. 2018). The field has also evolved towards establishing ML-models for approximating probability distributions rather than predicting specific targets (Lee et al. 2017). Due to such developments within the field, there has been an emergence of algorithms that are able to solve specific tasks, i.e. object or face recognition, better than humans (Goodfellow et al. 2018). It is especially advances within image analysis by Artificial Neural Networks (ANNs) and deep learning which have motivated the growing research interest in applying such technologies to increase the efficiency of topology optimisation. Assuming a regular finite element mesh is used to discretise the design-domain, one obtains a direct relation between pixels in an image and the material-density distribution throughout the elements in the mesh. This makes the application of well-known image analysis type models directly applicable to the discretised domain in terms of data representation. Further, as topology optimisation in itself consists of several approximate mappings achieved by iterative solvers, i.e. for solving the PDEs or optimising the sub-problem in each iteration, the idea of reduced and more direct substitutes for these operations is alluring.
In the past few years there has been an increase in publications applying AI-frameworks in an attempt to reduce the computational cost of TO. Many of these proposed frameworks are motivated by the resemblance between an element-based material distribution and an image, and the significant developments within deep learning for pattern recognition in image analysis. Increasing attention has, however, not yet yielded much significant progress. The existing literature demonstrates several dead ends, where non-transparent presentations of results oversell the promise of model architectures with unrealistic expectations. Neural network models are in some works treated as magic black-boxes with capabilities exceeding human limits, overlooking well-known limitations within the AI field. The idea of iteration-free TO by use of deep learning is particularly prominent, but also problematic. This review article is a reaction to these apparent misconceptions about the current state of AI, and what these models are capable of. Much like Sigmund (2011) was a response to then current trends in non-gradient TO, this review seeks to clarify why many existing AI-applications in TO seem unfruitful.
It is noted that the field of using neural networks for inverse design generally is expanding rapidly, not only in mechanics but also in a wide range of different fields, and not only in TO but also for many other varieties of design parameterisations. This review will mainly concentrate on TO formulations in solid mechanics, but also include some discussions about alternative physics applications. Considering the rapid growth and expansion of this field, there is no guarantee that all relevant works are included in this review, however, it is believed that the selection of papers discussed are representative of the current state of the art.
The paper is structured as follows; Sect. 1.1 gives a brief introduction to machine learning and neural networks, Sect. 2 presents the literature considered in this review and the different applications of neural networks presented in these articles, Sect. 3 addresses how to assess and evaluate such solution frameworks in TO, Sect. 4 discusses the limitations of current AI-technology and how these are reflected in the reviewed literature, Sect. 5 formulates some recommendations for further research into AI-aided TO and Sect. 6 summarises the important findings and comments on future prospects.
1.1 Artificial intelligence and neural networks
Artificial intelligence is a branch of the computer science field aiming to simulate intelligent behaviour using computers (Tiwari et al. 2018). The conceptual idea of AI has been present for decades, but the real acceleration in research interest has only been apparent over the last few years. The resurrection and increasing popularity is a reaction to technological developments improving computing power and techniques, where especially the introduction of GPUs for more efficient parallel processing has been crucial or the determining factor. Currently, AI is one of the hottest research topics due to the prospects of efficient computer-driven applications and the dream of obtaining AI systems capable of matching or succeeding human capabilities. General AI refers to the concept of a machine able to mimic the intelligence of humans and can be applied to serve any relevant function. This type of AI is, however, not yet realised and the feasibility of obtaining such machines is unknown. Research, therefore, mostly concerns itself with the area of Narrow AI, which is designed for specific applications.
Within Narrow AI especially the sub-field of machine learning, and subsequently deep learning, has received increased attention. These sub-disciplines are focused on exploiting existing data to make algorithms or models capable of solving specific problems or serving particular functions.
Machine learning refers to the group of methods engineered to complete specific computational tasks intelligently by learning from existing data. The field distinguishes itself from general computational sciences as it aims to automate the task of analytical model building using data and experience, relieving the degree of human analysis and hardcoded rules needed. This separation between what is seen as human and artificial intelligence is not consistently agreed upon in the scientific community. Some go as far as deeming anything that is programmable as being AI, which would imply that conventional TO is also AI. The authors of this review paper do, however, support the definition presented by Copeland (2016), which describes the distinction by
So rather than hand-coding software routines with a specific set of instructions to accomplish a particular task, the machine is “trained”using large amounts of data and algorithms that give it the ability to learn how to perform the task.
A “traditional” gradient-based algorithm is indeed hand-coded and does not have any such built-in learning aspects. All changes and update rules are pre-programmed. Given deterministic computing conditions and perfect arithmetics, repeated applications will arrive at the exact same final solution, even if the algorithm navigates through a complicated design space. Potential variations in final solutions may be caused by imperfect arithmetics or non-deterministic computing, i.e. due to parallel execution, but these variations are not deliberate actions the algorithm does to improve performance for the next run, and hence nothing is learned. The same can be said about genetic algorithms. Given the same starting conditions and random seed, the algorithm will always converge to the same solution. If later solving a slightly perturbed design problem, there is no mechanism for exploiting knowledge from the previous study to improve the solution obtained for the new problem. With this definition, it is thus not correct to categorise TO in its traditional form as AI.
To illustrate what actually does qualify as AI, based on the presented definition, this section aims at introducing the core concepts of machine learning relevant for topology optimisation. The methods applied in the papers reviewed are specialised models based on versions and combinations of those to be presented in this brief theoretical introduction.
The majority of ML-methods used for topology optimisation are deep learning frameworks, meaning they are based on the use of Artificial Neural Networks (ANNs). Therefore, the following theory will focus on introducing such ANN-based methods. This family of methods is popular due to the associated design-flexibility resulting in possible modifications for a wide variety of applications (Janiesch et al. 2021). An ANN mimics information processing in biological systems by modelling connected processing units referred to as neurons, where the connections between them represent signal transmissions.

General structure of an ANN illustrating how the input-array \({\varvec{x}}\) flows through the layers of the network and is translated to some output-array \({\varvec{y}}\). Different network architectures are achieved by varying the number of hidden layers, the number of nodes within each hidden layer and the connections between the nodes in different hidden layers
In simple terms ANNs are used to represent non-linear functions, mapping some n-dimensional input to some m-dimensional output. Fig. 1 illustrates the general structure of an ANN where the neurons are represented by nodes and the signal transmissions as edges. The network consists of three elementary types of layers, namely input, hidden and output layers. Data are passed to the network in the input layer, and passed on through the hidden layers using the neural connections, before the mapped result is passed to the output layer. During each connection the signal from the origin node is multiplied by a weight and added to a bias before being passed through an activation function associated with the destination node. Different activation functions may be used for separate parts of the network, and the general definition is that such a function determines how the weighted sum of the neural input is transformed to the appropriate neural output. The typical choices of such activation functions is what introduces non-linearity in the ANN.
The different layers in an ANN as such represent nested function evaluations of the input data to obtain the desired output format. The nature of the overall model is determined by the network architecture in terms of number of hidden layers and number of neurons associated with each of these layers, as well as the weights, biases and activation functions used. The weight and bias parameters of a network are determined through the training process, where the model is fitted to the desired application based on available data. Training an ANN can be seen as a form of complex regression analysis or an optimisation problem, aimed at obtaining the best cost function for the model based on the desired input-output characteristics. Depending on the specific application this cost function may include simple measures like prediction accuracy or more complex measures such as distributional transport or equilibria to min-max games as discussed further below. There are several different learning algorithms available for such tasks, these are typically categorised by the characteristics of the desired model and the available data for knowledge extraction.

An overview of the common learning strategies from ML used for ANNs and their respective areas of application in TO
Figure 2 gives a general overview of learning methods in terms of training strategy and how they relate to TO applications. Supervised and unsupervised learning constitute the most commonly considered strategies for fixed datasets while reinforcement learning is a different experience-based approach (Goodfellow et al. 2016). Transfer learning acts as an extension applicable to any of the other strategies. To further elaborate on the fundamentals of ML it is also relevant to give an introduction to the mathematical models commonly applied within each of these categories.
Supervised learning is used when the training data consists of inputs with known corresponding output values, i.e. the x-values and desired y-values of Fig. 1 are known for each data sample. In this case the parameters of the network are updated as to minimise the prediction error, i.e. the loss function, between the model-obtained (\({\varvec{x}}\)) and target output (\({\varvec{y}}\)) across each of the training samples, such that an approximate map from input to output is achieved. Supervised learning is commonly applied when the aim is to achieve iteration-free TO (Abueidda et al. 2020; Yu et al. 2019) or when an efficient approximation of sensitivities is desired (Qian and Ye 2021). In the first case the inputs could be the problem boundary conditions and applied loads while the outputs are corresponding pre-optimised structures. In the latter case the inputs also include information about the structural design, i.e. the element density values, and the outputs could for instance be the displacement field or strain energy density for each element in the structure.
Unsupervised learning is used when the model should detect underlying patterns without any predefined output images. Instead, the formulation of the loss function alone controls the objective of the learning process. Care is therefore needed to ensure that the loss function measures the performance for the intended task, accounting for all aspects of what defines a desired output. On the other hand, this feature makes unsupervised learning more suited than supervised learning for problems where there are multiple useful outputs for each input. This would, however, require that one is only interested in one of the possible outputs for each input and that there exists an appropriate function for measuring the quality of the output. The unsupervised approach to achieving iteration-free TO could therefore circumvent the generation of pre-optimised structures by including the compliance and volume fraction constraint in the loss function (Halle et al. 2021). Unsupervised learning can also be used directly as an optimisation process of a reparameterised design representation (Chandrasekhar and Suresh 2021c; Deng and To 2021), or post-processing of an optimised structure by de-homogenisation (Elingaard et al. 2022).
Reinforcement learning is a process for discovering policies for how to best choose a sequence of actions to evolve a system from an initial state to reach some predefined goal. The loss function equivalent for this learning procedure is defined by a reward-punishment scheme evaluating the quality of an action. Reinforcement learning differs from unsupervised learning in that the possible system states and actions must be pre-defined. This strategy is useful for conducting optimisation tasks which can be reformulated as a Markov decision process like binary optimisation of trusses by evolutionary strategies (Hayashi and Ohsaki 2020). In this case, the system states correspond to a truss structure, formed by a set of members, the actions are the removal of some structural members, and the punishment or reward is measured by whether the chosen action leads to a violation of constraints (i.e. compliance or stress). As such, the goal is to achieve an optimised structure satisfying the constraints by iteratively removing structural members, and the trained model is used to determine what structural members to remove at each iteration. This learning strategy can also be used for exploration of the design space by choosing different parameter settings for topology optimisation (Sun and Ma 2020; Jang et al. 2022)
Transfer learning refers to when a pre-trained model developed to solve a specific task is re-purposed to a second task using the parameters and biases of the pre-trained network as initial settings in the training process for the new task. Knowledge gained from training the model to handle the initial task is as such used to limit the effort in terms of data samples and computational time needed to obtain good performance for solving a different but related task. The applicability and viability of transfer learning heavily depends on the generality of the initial task or how closely the different tasks are related. Transfer learning could be used to improve the performance of a model trained for iteration-free TO on new problems with boundary conditions, length scale or constraints different from those covered in the training cases for the original model.
Several of the solution frameworks contained in this review incorporate what is deemed active or online learning. This could either indicate that transfer learning is conducted during the optimisation procedure to improve the performance for the specific problem being solved, or that the learning procedure is re-started for each instance, where sequential transfer learning ensures adaption to the current problem. As for transfer learning, both supervised and unsupervised learning can be utilised in this way.
Based on some initial guesses for the weights and biases, an optimisation procedure is used to iteratively update the parameters to improve the performance measured by the loss function. There are different learning algorithms with different settings available to perform this training process, and an appropriate choice of method and settings is up to the designer.
In supervised and unsupervised learning some version of a gradient-based optimisation algorithm like gradient descent and Levenberg-Marquardt is commonly employed to determine the best choice for model parameters. The concept of backpropagation is often exploited to compute the desired gradients. Backpropagation simply refers to the procedure of computing the gradient of the loss function with respect to the model parameters using the chain rule, very similar to TO with multiple filtering operations (Wang et al. 2011). Reinforcement learning problems are represented as Markov Decision processes and differ from the other training categories in that the sequence of actions chosen are dependent. Therefore, the frameworks of the applied training algorithms are inspired by Dynamical Programming or probabilistic methods like Monte Carlo simulation.
In addition to the training procedure setup, the activation functions and the network architecture must be determined. The network architecture is defined by the number of hidden layers, the number of nodes in each of these layers and the connectivity between nodes of different layers. These characteristics are commonly referred to as the network hyperparameters and can both be determined manually or by a separate optimisation-like routine (Goodfellow et al. 2016).
The number of hidden layers is used to distinguish between shallow and Deep Neural Networks (DNNs). It is especially within the deep learning segment that technological advances have had an important influence, as an increasing number of hidden layers and thus an increasing model complexity, requires both more robust learning algorithms and more efficient hardware technology. As the number of parameters in a network grows, so does the memory consumption and time needed for training. Therefore it is crucial to exploit the flexibility in the network structure to increase performance for the desired task, while limiting the size of the network.
There are some well-established network architecture types that form the foundations for most ANN models. Feedforward Neural Networks (FNN) or Multilayer Perceptrons (MLPs) are acyclic ANNs where information only moves forward from the input layer, through the hidden layers sequentially, towards the output layer (Goodfellow et al. 2016). Feedforward neural networks are usually used for supervised learning of data that is neither sequential nor time-dependent. A network is fully connected if each neuron is connected to all neurons in the next layer. Such networks are useful as no special assumptions need to be made about the structure of the input. The drawback is however that this generality may hamper the model performance and require unnecessarily high computational costs.
Convolutional Neural Networks (CNNs) are a special case of feedforward networks which are not fully connected, and where weight sharing is used to make the networks translation equivariant. Translation equivariance means that the network has the same output for given features, regardless of where they are located in the input. CNNs are particularly useful for treating regular grids such as 2D or 3D images (Janiesch et al. 2021). A crucial ingredient in a CNN is the use of an ANN as a filter which can be seen as a sequence of discrete convolutions where each is followed by a non-linear mapping. Considering the input image to be the discrete function being convolved, the network weights define the convolution function while the activation functions introduce the non-linearity in the network. The concept of weight sharing means that the same filter can be placed in different locations of the input image reusing the same weights to extract the same features. Typically, many layers of such filters are used, paired with pooling, downsampling, or upsampling between layers. The term CNN refers to the entirety of the network constructed by these multiple layers of filters. Note that the weights are not shared between layers but only within each layer.
As such, weight sharing allows for the network to be trained to recognise the same objects anywhere in the image, even if the object placement is not varied in the training dataset. Another important benefit of weight sharing is that the size of the network is reduced, in terms of the number of parameters one need to adjust during training. The CNN-architecture therefore allows for using fewer training data samples to create a smaller network with improved performance.
The mentioned network architectures are suitable for supervised training and generating discriminative models, which are usually used for regression or classification with known output features. Alternatively, there are generative models that aim to learn some data distribution through unsupervised learning. One such model is the Variational Autoencoder (VAE) which aims at learning how to efficiently represent the data by compressing it to a latent vector, and consequently how to translate from such a latent vector back to the original input format. The corresponding network thus has an encoder-decoder structure similar to CNN, but the purpose is to accomplish a proficient dimensionality reduction of the data. Based on a trained VAE, new data instances can then be generated by sampling in the latent space and subsequently applying the decoding procedure. This allows for training a VAE to reduce the dimensionality of the design representation such that optimisation can be performed by iteratively updating the latent vector (Guo et al. 2014). The drawback of the VAE is that when used to generate new data one can obtain blurry samples as a consequence of the learned average data representation.
Generative Adversarial Networks (GANs) take a different approach to the generative task by coupling a generator network with a discriminator used to judge the quality of the data samples created by the generator. The training of a GAN constitutes a min-max game between the two networks where the generator aims at improving its ability to create “fake” data samples imitating the available training data, while the discriminator is trained to distinguish whether some input data sample is a generated fake or not. By this procedure the GAN learns how to create new seemingly real data samples. The provided data samples could consist of TO-optimised structures, where the generator then learns to generate new believable structural layouts and the discriminator learns how to detect inappropriate structures. In application the provided data samples could consist of TO-optimised structures, where the generator then learns to generate new believable structural layouts and the discriminator learns how to detect inappropriate structures. The model can then be used within a framework for diversifying design options for a specific mechanism (Oh et al. 2019; Rawat and Shen 2018)
A third family of generative models is Normalising Flows (NFs) which, in contrast to VAEs and GANs, explicitly learns the probability density function of the input data (Kobyzev et al. 2021). These models are constructed by invertible transformations mapping the complex distribution of observed data to a standard Gaussian latent variable. The latent space is in this case of the same dimensionality as the input and does therefore not suffer from the loss of information by averaging as VAEs do, where the latent space commonly serves as a compression of the input data. The invertible nature of the NF models allows for loss-less reconstruction of the input data and generative potential. This generative potential allows for high-dimensional image (Kingma and Dhariwal 2018; Dinh et al. 2016) and point cloud (Yang et al. 2019) generation and could be utilised for TO in a similar manner to VAE and GANs. NFs can further be used to map between image and point cloud representations (Pumarola et al. 2020) which could indicate potential for post-processing of TO optimized structures. To the best of our knowledge, there are no works in the current literature utilising NFs for TO.
As such, an overview of the modelling principles at the core of ML-applications for TO has been presented. How these strategies are combined and exploited to aid in the development of TO solution frameworks is covered in more detail by the following literature review.
2 Literature review
Initially the motivation behind combining AI with TO was related to the increasingly successful utilisation of deep learning models for image analysis and generation. This is reflected within the currently most popular applications of AI in TO, where some NN-architecture is trained in the hopes of generating viable structural images given problem descriptive inputs. In such approaches, one seeks to develop an AI-methodology replacing the need for conventional iterative optimisation methods. Other applications of AI-methods related to sub-procedures of the optimisation process are however also receiving increasing interest, with the hopes that one can develop models to support or fully replace certain computationally expensive components of the solution procedure.
2.1 Overview
The current literature on AI in TO can be categorised into five main groups. For the purpose of this review, these categories are defined as Direct design, Acceleration, Post-processing, Reduction and Design diversity. This section will give a quick overview over what these categories entail and connect them to the principal AI concepts utilised within each category.
Direct design refers to the strategy of creating learning models to directly predict an optimal structure when given some problem descriptive characteristics, and as such the aim is to achieve optimal structures “instantly”, in an iteration-free manner.
Acceleration refers to learning models used as supplements to conventional iterative solution methods, with the aim of reducing the computational costs. This is typically achieved through replacing the FE-analysis with some approximate model at a subset of the iterations, or by constructing a direct mapping between intermediate structures effectively skipping some subset of iterations.
Post-processing is defined as the modification of structures obtained through conventional TO or homogenisation usually aimed at ensuring manufacturability by changing the shape, determining microstructure configurations, smoothing of boundaries or as a substitute for de-homogenisation approaches.
Reduction is performed with the aim of reducing the size of the design space by constructing a model that describes the topology in a more compact way. This reparameterisation then allows for iterative optimisation with fewer design variables, which effectively speeds up the solution procedure. Note that such approaches resemble standard Model Order Reduction methods, but with the distinction that the nature of the AI approaches is different, since these are not explicitly programmed.
Design-diversity concerns generating multiple design solutions to the same topology optimisation problem and is somewhat related to finding the Pareto-front in multi-objective optimisation. A set of several candidate structures exhibiting different desired characteristics are generated providing multiple different design options to choose from.
For ease of describing trends within the different application areas Table 1 sorts most of the reviewed articles into appropriate, more specific sub-categories of each of the five main groups.
2.2 Categorisation
Within each of the five main categories presented, the research is built on similar fundamental ideas and motivations. Further, the resulting model performances exhibit mostly comparable strengths and weaknesses. Therefore, this section will focus on the contents of each category in a collective manner, highlighting works if distinction is deemed necessary.
2.2.1 Direct design
The direct design model approach is currently one of the most popular applications of AI in TO, and the aim is to directly achieve an optimised structure for a given problem definition, completely removing the need for expensive iterative procedures. Commonly this is achieved by implementing neural network architectures popular in image segmentation, like CNN or GAN. The structural design representation is typically defined by element densities within a regular FE-mesh, similar to the conventional SIMP approach, but some base their structural representation on geometrical features inspired by Feature Mapping or Moving Morphable Components (MMC) techniques (Zheng et al. 2021b; Hoang et al. 2022).
The considered optimisation problem is usually minimum compliance subject to a volume constraint, but other applications like thermal conduction problems, Li et al. (2019) and Lin et al. (2018), are also considered. Model inputs consist of boundary conditions, applied forces and volume fraction, given in spatial representation by a sequence of input matrices with dimensions equal to those of the considered FE-mesh. In certain works, additional inputs related to initial stress or strain (Nie et al. 2020b; Yan et al. 2022) and displacement fields (Wang et al. 2021c) are also included. The trained network is then used to map these inputs to some final structural design, either by regression as continuous grey scale element-density values, or by classification as binary black-and-white values indicating whether material is present within an element or not. Garrelts et al. (2021) presented a slightly different approach aiming at training a model to also handle rotated pictures taken of hand-sketched boundary conditions as input, and then mapping this image to an optimised Michell structure.
Most of the direct design models are trained in a supervised (CNN) or semi-supervised (GAN) manner where a large number of optimised structures are used as training output target samples. This means that at least one complete run of conventional TO must be completed for each problem case considered in the training process. Therefore it is critical to limit the size of the needed training dataset as well as the number of elements in each sample to make the computational time for building the desired model viable. This is however in conflict with obtaining a well-performing model that is able to handle a wide variety of different problems, as neural networks perform better on inputs that are similar to the previously seen training samples. These factors are likely the reason for most direct design models in the literature focusing on problems with fixed or very similar support conditions, only varying the volume fraction and applied loads, where the number of and possible placements of loads typically also come with limitations.
Common for most of these network architectures, is that they avoid fully connected layers. Therefore, in theory, they allow for flexibility in terms of the dimensions of and number of elements in the considered FE-mesh. Still, the presented training and test problems are typically restricted to a small fixed mesh where the input matrices and the output image for the network are explicitly defined by the dimensions of this fixed mesh, such that this potential adaptability is not exemplified. Further, when the network is only trained for the same regular mesh dimensions as a direct mapping from boundary conditions to an optimised structure, it is unclear whether the model is readily translated to problems with different mesh dimensions or resolutions, even given the inherent flexibility of the CNN. Zheng et al. (2021c) made some effort to ensure mesh flexibility by designing a network for a larger reference mesh with a mechanism for defining empty elements, such that the mesh dimensions could be varied within this reference domain. Their approach implies that the fixed-dimension reference mesh is defined before training, where it must be large enough to encompass the meshes of all problems the network will be used to solve in the future. In this review, it is found that none of the published direct design models explore whether it is possible to fully exploit the generality offered by CNN-types networks, in terms of input image dimensions.
If the network architecture is designed specifically for certain mesh dimensions, then the network size increases with the number of elements in the mesh, resulting in more parameters to be determined during training and a larger memory consumption for storing the model. In turn, this also increases the cost of obtaining training samples, as finer meshes imply more time needed to optimise a structure using conventional TO. It appears that such perceived mesh dependency of the direct design models is a limiting factor for research within this class of approaches. Further, the expense of generating high-resolution training samples and the increased structural complexity associated with higher resolution FE-meshes, are likely determining factors explaining why most of the current literature only considers low-resolution meshes, typically with fewer than 4,000 elements and at the most 26,000 elements (Lei et al. 2019; Li et al. 2019; Zheng et al. 2021c), which is five orders of magnitude below state-of-the-art TO methods using two billion elements (Baandrup et al. 2020).
Yu et al. (2019) considered 2D coarse grid problem cases with fixed boundary conditions, randomly sampled volume fraction between 0.2 and 0.8, and random single-point directional force application. By repeated sampling and application of open-source topology optimisation code (Andreassen et al. 2011) 100,000 corresponding optimised structures are generated, where a random subset of 80,000 of these are used for training and validating the network, while the remaining 20,000 are used for testing. The restricted sampling space, the large number of generated structures and the random selection of training and test data means that there is a high likelihood of each test-sample being similar to one of the training cases. Still, the reported results show that the prediction ability of the model is lacking when applied to the test-cases as larger structural disconnections are apparent in the predicted structures. Thus, thousands of expensive datasamples are collected to train a network which fails at solving problems strongly related to those seen by the network during training. Nakamura and Suzuki (2020) used the results reported by Yu et al. (2019) as a benchmark for their direct design network. By increasing the number of optimised structures used for training and validation of the model to 330,000, within the same sample-space, they reported a greater prediction accuracy in terms of pixel-wise density errors, as expected when allowing for more than three times the number of training instances. However, the worst case solutions still exhibit structural disconnections, implying a large prediction error in terms of the compliance of the design.
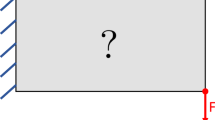
To illustrate both why such disconnections may occur and their effect on the structural performance, a simple test case inspired by the type of problems considered by Yu et al. (2019) and Nakamura and Suzuki (2020), is presented in Fig. 3-4. By reducing the density of two of the elements in the original structure (4a), the central bar is almost disconnected completely (4b). Applying volume-preserving thresholding (Sigmund and Maute 2013) the corresponding solid-void structures (4c) and (4d) are obtained, where a full disconnection is now obtained. The structural compliance with respect to the boundary conditions (Fig. 3) is indicated for each of the four presented structures. The presented test case is as such modelled on a square domain with a clamped left side, subjected to an external single-point load of horizontal magnitude 0.5 and vertical magnitude 1.0 applied to the top right node.

Problem boundary conditions considered for exemplifying the effect of grey scale and structural disconnections

Compliance minimisation example for boundary conditions in Fig. 3 (subject to a volume fraction constraint of 0.2) illustrating the effect of disconnections on a 32x32 mesh. The grey scale structure (a) is obtained by top88(32,32,0.2,3,1.5,2) (Andreassen et al. 2011). Disconnections are imposed (b) and thresholding is applied to obtain the 0-1 counterparts (c)-(d)
Table 2 presents the mean average density error (MAE) as well as the relative increase in compliance (Gap) when comparing the connected and disconnected structures for both the grey scale and black-and-white designs. Firstly, it can be observed that for the grey scale structures, if the MAE was used to assess the difference between the two, they would be nearly identical. However, the compliance of the semi-disconnected structure is 12.9% higher than for the originally connected. After thresholding to fully black-and-white designs this effect is intensified, as the MAE remains below 0.4%, but the compliance is more than doubled. Therefore, if the model is trained with an increased focus on minimising errors related to image-reconstruction (e.g. MAE or Binary-Cross-Entropy) there is a risk of overlooking adverse effects when it comes to model performance. The works of Luo et al. (2021) and Behzadi and Ilies (2021) corroborate this suspicion, as physical performance or topology awareness is included in the loss function of the direct design model and a reduction in structural disconnections is observed. Halle et al. (2021) further considered fully unsupervised learning for direct TO where no disconnections are observed in the illustrated examples, but occurences of discontinuities and a loss of fine features are still presented. Note that with increased physical information embedded in training, FEA is needed each time the loss function is evaluated, making the actual training procedure much more computationally expensive. This could, however, reduce the overall cost of training data generation by obtaining higher accuracy using fewer optimised structures for training.
By presenting both the grey scale and 0-1 designs, other important aspects of comparing optimised structures are also highlighted. Firstly, considering the compliances of the two connected structures from Fig. 4, volume-preserving thresholding improves the structural performance significantly. Secondly, a partial disconnection by a low-density region in grey scale may result in a full disconnection when thresholded to a 0-1 design, which leads to a significant increase in compliance. As such, thresholding is important to reveal the true structural performance. Therefore, in line with the recommendations of Wang et al. (2021b), solid-void designs are advised for a fair comparison of optimised structures.
Based on the presented example, it is explained why MAE alone is not sufficient for either training a direct design model nor evaluating performance of a solution framework, as this measure may erroneously overestimate the performance of a structure. Further, the degree of grey scale may influence compliance comparisons between structures. Either a structure with more grey scale can be at a disadvantage or it can fail to capture a crucial structural disconnection. Hence, it is clearly a fundamental mistake to compare discrete to grey scale designs, or vice versa.
Bielecki et al. (2021) proposed an extended direct design approach utilising a three-step procedure. Given the problem-defining boundary conditions a DNN is first trained to realise a structure by determining the material distribution within the design-domain. Thereafter a CNN is used for structure refinement achieving reduced grey scale and smoother boundaries. In the last step conventional TO is applied for a maximum of 5 iterations to post-process the structure to ensure physical consistency and volume-constraint coherence, i.e. removing disconnections and ensuring that constraints are satisfied. The model was trained separately for 2D and 3D problems with fixed mesh sizes of 80x80 and 20x20x20 elements, respectively. Similar conditions for sampling of training data were utilised in both cases, where different volume fractions and supports or loads in corner nodes constituted the sampling space. To avoid rigid body motion, 3 out of 8 and 6 out of 24 degrees of freedom (DOFs) were fixed throughout for 2D and 3D cases, respectively. In total 614,304 samples were optimised and used for training for the 2D case, while for the more time-consuming 3D-case the training set size was restricted to 45,000 samples. Test-cases used for model assessment are obtained by sampling from the same problem space as for the training data generation. Comparative results are not reported across all 1,000 test samples, but a significant speed-up is obtained and for the presented results the compliance values are at least as good as those obtained by conventional TO. This holds true for both the 2D and 3D cases, but as a significantly smaller fraction of the problem space is used for training the 3D-model, the overlap between training and test problems is expected to be smaller. Due to the large number of optimised structures needed for training, the construction of the model is computationally expensive. Further, as the problem instances considered are sampled within a very restricted subset of possibilities that utilise the same coarse mesh resolution, transferring this framework to problems outside the training instance distribution is expected to increase the computational cost further.
A common trend amongst the papers within the direct design category is the requirement of a large set of TO-optimised structures, which becomes computationally expensive to collect and is likely the reason why these papers only consider very coarse scale fixed meshes and few variations in boundary conditions. Even with a large amount of training data and a very restricted problem space most works present results with poor structural performance. The use of image-reconstruction type loss functions only is a popular way of training the presented ANNs, significantly reducing the training time compared to if structural performance was to be integrated. Image-based errors do, however, not reflect the quality of a structure and thus the network learns based on an incorrect measure. There are other reasons for why the premise of this application category is flawed, which will be covered later in Sects. 3 and 4.
2.2.2 Acceleration
The application of AI-methods for accelerating TO is receiving increasing attention, where approaches both aim at limiting the number of iterations and complex computations needed within a conventional iterative optimisation procedure. The strategies in this category offer a more diverse profile than for the previously described direct design models, but there are some key similarities in the motivational ideas behind the presented works.
Sensitivity analysis An AI-method is considered to apply to sensitivity analysis when the aim is to replace or reduce the need for exact evaluations of sensitivities. Some of the works (Aulig and Olhofer 2013; Olhofer et al. 2014; Aulig and Olhofer 2015) contained in this section are only applicable, in the sense that they actually facilitate a speed-up, in cases where the sensitivities are difficult to obtain by conventional FEA and adjoint analysis. The claim of existence of such TO problems is often heard, but seldom exemplified. Other works (Chi et al. 2021; Qian and Ye 2021; Keshavarzzadeh et al. 2021b) try to reduce the computational load of, or completely eliminate, FE-analysis needed in the TO process.
Common for these approaches is that they aim to train a model to approximate complex computations by some functional relation. With this purpose some feed-forward neural network is constructed and trained as a regression model using supervised learning. Typically the network inputs consist of at least the current element densities. In some cases the loading conditions are also included and for procedures where FEA is still present in some form, displacement or strain energies are also supplied.
A single pass through the network may apply to one individual element, a patch of elements within the structure or all elements in the structure simultaneously. Approaches only considering subsets of elements at a time can allow for increased generalisation ability in that mesh- and problem-dependencies are potentially reduced, but on the other hand, important global information may be overlooked. Further, FE-analysis of a single structure and its density histories can provide a larger set of training samples with varying characteristics. As such, data generation is in most cases significantly cheaper than for the direct design models and there is potential to naturally capture greater input-diversity. By considering such sub-structures, the similarities between training and test data could be expected to increase, even with vastly different boundary conditions and load cases.
Lee et al. (2020) proposed a solution framework based on the conventional Optimality Criteria (OC) method, where two separate CNN-models are trained to predict compliance and volume fraction, respectively. For compliance this means that the need for FEA to evaluate the structural integrity is eliminated, replacing the computations with a less complex functional approximation. The conventional computation of the volume fraction is of linear complexity which is now replaced by some non-linear function represented by the corresponding CNN. The overall idea is that these neural networks will reduce the computational load of each iteration in the optimisation process, resulting in a significant speed-up. Most of the presented experimental results are focused on the network’s ability to predict volume fraction and compliance for a given structure, and thus the integration of the model in a TO process, where element sensitivities are needed, is not detailed. The MBB-beam and cantilever beam with fixed mesh discretisation and varying volume fractions are considered throughout the paper, both for training and testing. A full assessment of the method performance is therefore difficult, due to large similarities between training and test cases. Papadrakakis et al. (1998) and Sasaki and Igarashi (2019) similarly presented ANNs trained to predict objective and constraint values of a structure, aimed at replacing the fitness-evaluations in each iteration of a GA framework. Qiu et al. (2021) trained networks to iteratively remove material from a fully solid domain, similarly to evolutionary structural optimisation, but without the use of FEA in the actual optimisation procedure.
Aulig and Olhofer (2013); Olhofer et al. (2014) and Aulig and Olhofer (2015) focused on designing regression-type ML-models for predicting sensitivities when the adjoint approach is unattainable (not exemplified in their work) such that finite differencing is the only alternative. Standard compliance minimisation problems are used as examples, for which the formulas for exact sensitivities are known. The model inputs are related to the element densities and displacements (computed by FEA). In compliance minimisation the exact gradient of an element with respect to the objective is a function of these same features. This means that a good performance in terms of sensitivity accuracy can be expected for this exact problem formulation, but no conclusions about transferrability to other formulations can be made. A framework for further limiting the computational cost of the finite differencing alternative is also presented. Here the computational load of FEA is reduced by adaptive sampling of elements needed for exact evaluation, reducing the degrees of freedom in the FEA. This strategy is, however, not related to ML or NNs, and thus outside the scope of this review.
If the desired effect of the model is to reduce the computational load of FEA, but not necessarily completely removing this analysis technique from the optimisation procedure, another option for training the model is to facilitate for online learning. Online learning refers to when the model is not trained on pre-collected data, but rather trained during application to adapt to a specific problem. For the considered purpose, this entails that the model is trained during the optimisation run where FEA is then only completed in a subset of iterations and the obtained solutions are used in a sequential transfer learning procedure with an increasing number of data samples. Chi et al. (2021), and similarly Zhang et al. (2021a), presented such an approach where a transfer learning-based procedure is conducted after each set of new training data additions as to iteratively make the model more precise. The authors propose to perform the optimisation as a two-scale approach where a coarse grid version of the structure is subject to FEA at each iteration, while the trained model is applied to map these results to a finer mesh where FEA is only applied at a subset of the iterations. These approaches are as such not only concerned with sensitivity analysis, but utilise a multi-level TO approach to obtain the computational reductions associated with the sensitivity analysis. The presented results show promise and accuracy of the fine grid sensitivity predictions appear to improve with this online-approach. The approach and resulting speed-up are similar to those of multi-resolution techniques (Groen et al. 2017; Nguyen et al. 2012).
The main challenges for ANNs aimed at reducing the computational cost spent on FEA during optimisation are two-fold. Firstly, some approaches build on erroneous premises where the conventional alternatives are assumed less efficient than they really are, leaving these approaches redundant. Secondly, models developed for very specific problem instances become too restricted to be used as a general framework for TO. As for the multi-resolution online-learning approaches, these may be affected by coarse mesh restrictions of fine features when projected to a higher resolution. This phenomenon is common for the two-scale methods reviewed and will be covered in more detail when covering the upscaling category in Section 2.2.3.
Convergence If a model is trained to map between intermediate solution structures with the aim of reducing the total number of iterations in the optimisation procedure, it is said to pertain to accelerating convergence. Typical choices of methods are based on either a direct design-like model (Ye et al. 2021; Joo et al. 2021) or some time-series inspired forecasting (Kallioras et al. 2020). The direct design-type models map the input grey scale image of an intermediate design to an almost converged structure. Alternatively, the time-series inspired methods consider the trajectories of the densities of the individual elements and seek to directly map each element from a given iteration to a close to converged state.
The first approach inherits most of the challenges associated with direct design models. If the full image is to be mapped at once, the constructed model is likely to be mesh-dependent. Ensuring diversity and accuracy for different problem characteristics is difficult and comes with a large computational cost related to data sample generation. It does, however, benefit from the fact that more descriptive data is available as network inputs. From the performed optimisation iterations, used to reach the intermediate structure, both the displacement field and density history of the elements are known and can be used as inputs to the model.
Sosnovik and Oseledets (2017) trained a CNN to translate the grey scale image of the structure obtained after k SIMP iterations to a final black-and-white design. The training dataset was generated by running 100 iterations of SIMP on pseudo-random problem formulations on a 40x40 mesh. As inputs to the network the element densities at iteration \(k\le 100\) and the latest change in densities from iteration \(k{-}1\) to iteration k are supplied as two grey scale images. Different strategies for sampling k in each training sample were tested, and the output target considered was the black-and-white image obtained by thresholding the optimised structure at \(k=100\). The trained model is shown to outperform standard thresholding for the training dataset, but when tested on new problem formulations, heat conduction problems, the performances become similar. Performances are measured by binary similarities between structures, and no measures for compliance or volume fraction of the obtained structures are reported. Structural results are also illustrated for problems similar to the training datasamples on finer grids (up to 72x108 elements), but the effect seems to simply be smoothing of boundaries compared to coarser structures. Joo et al. (2021) proposed a similar approach, but instead of mapping the full structure at once, their model divided the structural image into overlapping sub-modules, which then separately are mapped to an optimised sub-structure, and the complete structure is subsequently obtained by integrating over these sub-modules.
One benefit of considering the structural image as patches or a whole instead of element wise is that some information about the interaction between the elements can be retained and learned by the CNN. In the time-series approach however, there is an assumption of independent density-trajectories of each element which might be problematic exactly because of the fact that the elements must have appropriate interaction to form a viable structure. Some of these interactions may be observable for the network given similarities in their iterative density histories before the mapping is applied. A benefit of this approach is that the generalisation ability of the proposed method is likely to increase as there is less mesh- and problem-dependency reflected in the training samples. Success of this method does, however, depend on the expected iterative trajectories being similar even for different problem definitions. A moving structural member will lead to bell-type trajectories, meaning the direction of the density-trajectory of the concerned elements change several times during the full iteration history. The assumption is therefore that an element’s density-trajectory during the first few iterations is sufficient to distinguish the elements for which this happens, no matter what structural problem is considered.
Kallioras et al. (2020) proposed a time-series approach where the iterative element density histories over the first 36 SIMP iterations were used as input to a neural network which individually maps the element densities to close-to-converged values to form a structure from which SIMP is continued until convergence. The model used is a Deep-Belief Network (DBN) which is a type of ANN where feature detection to achieve dimensionality reduction is conducted in each layer. As such, the input vector of the iterative density history of an element is gradually reduced to a final density value throughout the network. The network was trained on data samples consisting of the iterative history obtained from solving versions of the cantilever and simply supported beams with different length-scales and discretisations. The number of finite elements in these training samples ranged from 1,000-100,000, where four sets of boundary conditions for two different length-scales were solved for each resolution. When testing the model on problems different from the training cases, a computational speed-up is achieved. The speed-up is reported in terms of the number of SIMP-iterations needed to reach convergence, compared to the conventional approach. The obtained solutions have compliance values approximately matching those of the SIMP-obtained benchmarks. It should be noted that the comparisons to the conventional SIMP-approach is done in grey scale, which as shown in Fig. 4 may significantly underestimate the actual stiffness of a structure and thus the comparative results may not be representative.
Common for the presented convergence applications is that they assume part of the iterative density-history early in the optimisation procedure is sufficient to determine the nature of the final result. This can be a problematic assumption for problem instances where structural members move during optimisation causing large changes in both the individual element densities and the density field as a whole. The time-series approach based on individual pixel density histories is especially unlikely to succeed, but there may still be potential for approaches considering the global design change (Muñoz et al. 2022). It is reasonable to assume that given previous iteration history it is possible to predict the density-change after a subset of consecutive iterations, but by eliminating significant parts of the iterative search one is likely to face some of the same challenges as for the direct design applications.
2.2.3 Post-processing
AI-methods are considered as post-processing procedures when an optimised structure is used to generate the model input. As such, this application category pertains to methods for interpolating the given structure to a finer mesh resolution or shape optimisation and feature extraction for manufacturability purposes.
Shape optimisation When the aim of the formulated model is to alter the features of the obtained structure to ensure practical and cost-efficient manufacturability requirements are satisfied the method is said to perform post-processing by shape optimisation. Design aesthetics may also motivate such applications, where for instance Vulimiri et al. (2021) considered TO for minimal compliance while adhering to some reference design for structural patterns like circles or spider-webs.
Two of the works presented in this category, Lin and Lin (2005) and Yildiz et al. (2003), each proposed versions of ANN designed to perform hole-classification in a TO-optimised structure. Lin and Lin (2005) proposed a two-stage procedure where the first ANN is trained to recognise the underlying basic geometric shape of the hole, when given an input in the form of invariant moments describing the geometric characteristics of the hole in the optimised structure. The second stage consists of several ANNs, one for each basic geometry group defined for the first ANN, and they are each trained to fit a detailed shape template for the hole, within their basic geometry group. The input format used is a set of distance and area-ratios of the hole image represented in a dimension-independent manner, and the network uses this information to map the hole to one of twelve predefined geometric shape templates within the considered shape-category. Yildiz et al. (2003) trained a single ANN which uses the grey scale image of the TO-optimised structure as input and computes confidence measures for each hole in the structure, based on the perceived similarities to four basic feature templates. The identified hole-shapes are then used to formulate a feature based part model which is subjected to shape optimisation to obtain the desired final structural layout. The main challenges associated with the presented works relate to the fact that they both rely on manually defined sets of possible shapes. Further, as the sizes of these sets are limited it is unclear whether anything is gained from applying AI-based models to perform the identification tasks. Yildiz et al. (2003) also found, by testing different ANN architectures, that the best results were obtained when the ANN only contained one hidden layer. This raises the question of whether alternative and simpler deterministic methods could achieve similar results.
Hertlein et al. (2021) proposed a direct design type GAN-model with integrated manufacturing constraints for additive manufacturing and paired it with a post-processing procedure utilising conventional TO. The inputs to the model consist of channels relating directly to the 64x64 mesh considered, indicating supports and loads as well as build plate orientation to account for the manufacturability. The input encoding is constructed such that existence of material is encouraged in elements where the optimised structure is expected to have material, here defined by the locations of loads and build plate. The output from the GAN is a grey scale image representing the optimised topology. Training data are obtained running conventional TO (Andreassen et al. 2011) with an integrated overhang filter as presented by Langelaar (2017). It is also suggested that the resulting structure is post-processed by running some number of iterations of this conventional alternative, to further eliminate overhanging features and correct any compliance-related inaccuracies.
Overall, this type of application of AI-technology is not well-studied in the literature. This might be due to the introduction of filters and manufacturability constraint in the TO problem formulation and solution process reducing the need for post-processing, or that alternative conventional methods for post-processing with satisfactory performance exist. It would be of great benefit if ML could be used to extract CAD geometries from optimised designs, as many manufacturing methods require a format for structural representation which is not directly attainable from density-based designs. The viability of obtaining such a model is, however, not guaranteed. There is a body of literature on reverse engineering methods (Buonamici et al. 2018). These methods reconstruct CAD models from acquired 3D data in the form of triangle meshes or point clouds. Some methods produce constructive solid geometry (CSG) models (Du et al. 2018). These methods are often based on detecting primitive shapes in the input (Li et al. 2011) whereas Eck and Hoppe (1996) generated B-Spline patches from the input. Such methods could be exploited for post-processing of TO-optimised structures.
Upscaling The works belonging to the post-processing upscaling category typically consider a coarse grid structure optimised using conventional methods and apply some type of neural network to translate this structure to a finer mesh. There are various approaches to how to format the input to the considered model where Wang et al. (2021a) and Yu et al. (2019) evaluated the entire structural image of element densities as input while Napier et al. (2020) and Xue et al. (2021) divided the structure into patches of element densities that are processed individually but may have some overlap in terms of what elements belong to each patch. The latter option is likely to be the most beneficial in terms of generalisation ability, especially as the models have the potential to be more or less mesh-independent. Further, the patch-based approach may allow for fewer optimised high-resolution structures to be used for training data, and thus overall significant computational cost-savings may be achieved. One concern is, however, that the applied model does not have any concept of the structure as a whole, such that only boundary fine-tuning and no topology refinement is obtained.
Kallioras and Lagaros (2021) proposed a method (DL-scale) that somewhat differs from this approach as they apply deterministic upscaling, iteratively paired with the DBN convergence acceleration framework proposed in Kallioras et al. (2020). This work does therefore not apply AI-methodology for the actual upscaling, but is mentioned here as the reported results still reflect some of the common challenges within this category. Even though it is true that they observe significant speed-up for increasingly finer grids it becomes evident that the solutions obtained by the modified approach has a reduced capability of capturing finer features, when compared to the corresponding SIMP optimised structures. Further, for several of the reported cases, the level of grey scale appears to be higher for the DL-scale obtained structures, and as the minimum compliances compared in each test case are computed for grey scale images, it is unclear whether the overall better objective values obtained using DL-scale actually are representative. The lack of finer structural components when applying upscaling is a common occurrence in the literature, and works like Wang et al. (2021a) illustrate how the attempt to capture fine features might lead to structures with a large degree of blurry grey scale areas or even structural disconnections. Essentially, details on the fine scale are limited by the coarse scale resolution, which effectively works as a crude length-scale constraint.
Elingaard et al. (2022) proposed a CNN for mapping a set of lamination parameters on a coarse mesh to a fine scale design promoting very fine features. The network is as such used as a computationally efficient substitute for de-homogenisation (Pantz and Trabelsi 2008; Groen and Sigmund 2018) to overcome the current bottleneck in extraction of fine scale results in homogenisation-based topology optimisation. As inputs to the network the orientations from a homogenisation-based TO solution are used. The network is then used to upsample this information to an intermediate density field, which is post-processed using a sequence of graphics-based steps running in linear time to obtain the final high-resolution one-scale design. Unsupervised training is utilised to avoid the need for generating expensive targets and cheap input data generation for training is ensured by sampling from a surrogate field of low-frequency sines. The training is as such performed independently of the physical properties of the underlying structural optimisation problem, which makes the method mesh and problem independent. By numerical experiments, it is found that this approach achieves a speed-up of factor 5 to 10, compared to current state-of-the-art de-homogenisation approaches.
Common for the presented two-scale approaches aimed at translating structural information from a coarse to a fine grid, using the same measures, mainly densities or sensitivities, is that the coarse scale mesh imposes length-scale constraints on the fine grid. This means that little information is gained by utilising ANNs to perform this mapping, when compared to conventional interpolation techniques. This challenge does not occur if the ANN is applied for de-homogenisation, as here it serves as a tool for replacing a computational process which is a part of a pre-existing upscaling scheme where details are constructed from coarse scale information based on predefined rules.
2.2.4 Reduction
The typical approach for achieving reduction or problem re-parameterisation by use of AI-methods is to construct one or more inter-connected neural networks with the aim of representing a structure using fewer design variables and thus decrease the computational load of the optimisation procedure. This can be done by training a VAE for feature extraction and exploiting the reduced dimensionality of the obtained latent space to conduct the optimisation on this latent vector. Alternatively, the network can be constructed as a direct surrogate for the optimisation process such that the training of the network is equivalent to solving the given optimisation problem exploiting that the parameters and biases of the network are sufficient as design variables.
Guo et al. (2018) considered a multi-objective thermal conduction problem for which a VAE is trained in a supervised manner, with the aim of minimising the reconstruction-error of the encoder-decoder network. The model is then tested by integration in various conventional optimisation frameworks, including gradient-based methods, genetic algorithms and hybrid versions of the two. By encoding the intermediate structure, design-updates can be executed in the reduced latent space. The new latent vector can then be translated to an interpretable structure by the decoder, which is next subjected to physical analysis. As such, FEA is still needed for the full design space, using the same mesh discretisation, meaning the computational cost of computing objective and sensitivities remains the same as for the conventional methods. Nevertheless, there might be a potential gain in performance by reducing the number of iterations required, as the number of FEAs reported to reach convergence varies between the different solution frameworks tested. However, few test cases are reported and little comparison to state-of-the art procedures is conducted.
Chandrasekhar and Suresh (2021c) used an ANN to re-parameterise the density function, and thus in principle making the density representation independent of the FE-mesh. When integrating the new structural descriptor into a conventional solution framework, the weights and biases of the ANN become the design-variables that are optimised through unsupervised learning with a loss function corresponding to a weighted sum of structural compliance and volume-constraint violation. This is equivalent to conventionally optimising a new design representation, meaning that the network is not subjected to any actual learning. Thus, this is an example of using an ANN without the learning aspect.
Later, Chandrasekhar and Suresh (2021b) showed how this framework can be extended to a multi-material TO problem where the distribution of two or more materials within the structure is obtained simultaneously with the optimised topology, and Chandrasekhar and Suresh (2021a) added a Fourier-series extension to the ANN to impose length-scale control. In either case, FEA is evaluated on the same FE-mesh, which in each iteration is constructed by sampling densities for the needed spatial coordinates using the ANN. As such, conventional physical analysis on a discretised grid is still necessary to compute the sensitivities of the objective (in this case also the loss function) with respect to element densities, after which the sensitivities with respect to network parameters can be determined by classical back-propagation. A promising feature of this application is that because of the analytical density-field representation, sharper structural boundaries can be obtained. Currently, however, the structures are projected on a fixed FE-mesh for analysis which means that the boundary effectively is blurred. Further, there is a loss of fine features in the structures obtained by the new solution procedure, and detail does not appear to increase much with finer meshes. The results presented in Chandrasekhar and Suresh (2021a) also indicate that artefacts from the coarse discretisation may cause non-physical structures in the upscaled results. Moreover, as >90% of the optimisation time is spent on the FEA, this approach is unlikely to provide any promising speed-up unless additional measures are implemented to reduce the efforts needed to complete this evaluation process.
Deng and To (2020) presented a re-parameterisation approach similar to that of Chandrasekhar and Suresh (2021c), but with an increased focus on enabling representation of detailed 3D-geometries. Their method is coined deep representation learning and several different test-cases illustrate the increased ability to achieve structures including finer features. A comparative study to conventional TO is not detailed in the article, but the results do encourage further exploration of this method’s capabilities. Additionally, applications related to post-processing, and more specifically extraction of CAD models for manufacturability, could potentially benefit from this approach.
Other similar versions of re-parameterisation applications are also attempted in the literature. Chen and Shen (2021) perform online training of a GAN to obtain an optimised structure. The model is trained to firstly ensure volume-constraint satisfaction and secondly compliance value minimisation in an iterative manner. Hoyer et al. (2019) and Zhang et al. (2021b) altered the approach to directly enforce the constraints in each iteration, reducing the loss function to compliance only. Deng and To (2021) replaced the level-set function with an ANN, Zehnder et al. (2021) combined the method with a second ANN aimed at predicting displacements to achieve mesh-free TO, and Greminger (2020) ensured manufacturability in each iteration by manipulations in the latent space of a trained GAN. Hayashi and Ohsaki (2020) and Zhu et al. (2021) performed reparameterisation by reinforcement learning for truss structure optimisation. As most of these approaches still perform FE-analysis on the full mesh in each iteration, reported speed-ups are mainly caused by a reduction in the number of iterations until convergence. Another common trend for these works is that the resulting structures have fewer fine scale features than the corresponding solutions obtained by conventional TO. One could therefore speculate whether the reduction in iterations is a result of the re-parameterisation causing a perceived larger filter radius or coarser mesh.
Most of the works utilising ANNs for reductions in the dimensionality of design representation do not rely on typical learning techniques, as the network is re-initialised before optimisation each time. Here the NN architectures are simply used as a reparameterisation of the density field which is then subjected to a conventional optimisation procedure. An evident challenge for such approaches is the decreased ability in representing fine features when using fewer network-defining parameters.
2.2.5 Design-diversity
Generative design is the process of exploring different design options satisfying structural performance requirements and selecting a suitable subset fulfilling various specifications. A good subset of structures would present visually different good-quality design candidates, providing the option of selecting the final design based on other practical or visual demands not integrated in the optimisation model. Such demands could be the personal preference of a designer wanting a visually pleasing structure, which may not be directly quantifiable by mathematical constraints. To this end, ML-applications for design-diversity are aimed at maximising the aesthetic variety of the search space in the exploration phase or at determining the best subset in the selection phase.
Rawat and Shen (2018, 2019b); Shen and Chen (2019) and Rawat and Shen (2019a) presented a series of papers considering the same GAN-CNN paired framework. The GAN is here trained using 3,024 conventionally optimised structures to generate new unseen structural variations, while the CNN is trained to predict the volume fraction, penalty parameter and filter radius corresponding to these new solutions. The same fixed boundary conditions are considered throughout the papers, but only the 2D formulation is considered in the first three while Rawat and Shen (2019a) extend the model to 3D. The proposed framework provides a way of exploring the parametric solution space for a single problem requiring fewer direct optimisations, thus reducing computational time. In this manner, a larger number of design options for a structure can be investigated. The obtained structural results for the CNN-GAN pairing similarly to the direct design models exhibit some disconnections and noisy boundaries, motivating a post-processing procedure exploiting different filters to obtain a smoother design. This post-processing procedure is utilised throughout all above-mentioned papers, and is found to significantly improve the generated designs, but not completely remove all occurrences of noise or disconnected features.
Oh et al. (2019) similarly integrated a GAN in the exploration process to more efficiently generate new and different designs by replacing some of the topology optimisation runs needed. The network is trained to generate viable wheel designs that appear different from some given reference structure, such that it can expand the set of diverse designs more quickly. Sun and Ma (2020) and Jang et al. (2022) proposed alternative processes for exploration in generative design utilising reinforcement learning to maximise the design diversity. Sun and Ma (2020) employed different exploration tactics to alter the search trajectory of density-based TO methods by integrating reinforcement learning in the TO-process. Jang et al. (2022) combined reinforcement learning for parameter selection with GAN, similarly to Oh et al. (2019), for faster generation of new designs. Yoo et al. (2021) expanded on the generative model from Oh et al. (2019) where ANNs are also applied for both upscaling the 2D design to a 3D CAD design and prediction of physical performance.
A natural extension to design diversity is to consider multi-objective optimisation problems, where the exploration and selection relates to the determination or selection of a variety of options from the Pareto-front. Sato et al. (2019) utilised clustering and association rule analysis for selection of a beneficial subset of structures. The fundamental idea is to train a machine learning model to recognise determining similarities and differences between structural composition and performance, such that comparable designs can be grouped together. The selection of a limited subset which contains designs spanning a wide variety of structural options can then be obtained by sampling from each of the obtained groups.
ANNs for design diversity appear to have value in creating visually different designs. Much like for the direct design applications, the structural integrity of the newly generated designs cannot necessarily be trusted, and thus post-processing would be advised before the final design selection.
2.2.6 Other applications and physics
There is a wide variety of different NN-applications in the literature, and not all structural TO frameworks were deemed to fit within the frames of the presented categorisation. Some of these are, however, still worth mentioning as they contribute to a more complete picture of the current state of the field.
Even before the real emergence of ML-assisted TO as its own field, a few preliminary works considered using NN-like models to support size and shape optimisation. Adeli and Park (1995a); Park and Adeli (1995) and Adeli and Park (1995b) presented one of the earliest works utilising NN-models for structural optimisation. A neural dynamics model was presented, corresponding to an ANN with one variable layer and one constraint layer, meaning that the network size is related to number of design variables and constraints in the optimisation problem. Papadrakakis et al. (1998) and Papadrakakis and Lagaros (2002) later proposed a NN to replace the structural analysis within an optimisation framework based on Evolution Strategies (ES), obtaining a non-gradient optimisation procedure. The approach proved to provide significant speed-up compared to a “standard” ES optimisation algorithm, a family of methods later judged insufficient (Sigmund 2011). Luo et al. (2020) proposed another non-gradient TO framework, the Kriging-based MFSE method, utilising Gaussian process regression to build a surrogate model and a material-field series expansion representation of the structural design. Results indicated that a much larger number of FE-evaluations are needed to obtain convergence compared to gradient-based TO methods.
Lynch et al. (2019) and Jiang et al. (2020) proposed ML-strategies to aid in tuning of parameters used in TO by SIMP and MMC to limit the number of re-optimisations needed when uncertainties in the appropriate choice of optimisation parameters is present. Perry et al. (2020) tested different clustering and sampling approaches used for subset-selection within a visualisation framework aimed at illustrating the solution space for TO problems and the relationship between changes in boundary conditions and optimal solutions. Nie et al. (2020a) presented a CNN to predict stress-field distribution of a cantilever structure with external loads applied to the free end of varying magnitude and orientation and a selection of domain shapes (rectangular, trapezoid and holes). The isotropic material properties, mesh discretisation and supports were considered fixed. 100,000 instances were used for training, each requiring FEA to obtain the target values. As the test cases presented were sampled from the same restricted problem space as the training data, no efforts were exhibited to ensure clear distinction between training and test data. This means that accuracy in the obtained predictions does not necessarily prove the model has learned anything.
Li et al. (2021) presented a GAN utilising online training to replace stochastic alternatives in failure sampling during subset simulation for optimisation of periodic structures. Yim et al. (2021) proposed an ANN for predicting topology and end-effector location of a planar linkage mechanism given the path description. Barmada et al. (2021) utilised a VAE to predict magnetic field distribution of a die press to accelerate optimisation of a die press with an electromagnet for orientation of magnetic powder. Bonfanti et al. (2020) proposed a CNN for predicting the deformation properties of an image of mechanical actuators within a Monte Carlo/simulated annealing strategy for optimisation. As such, this approach is effectively an acceleration framework, but due to the image-related nature of the approach and the large number of training samples, nearly one million structural images, many of the same arguments against claims of improved performance compared to conventional TO methods as for direct design approaches, like e.g. Bielecki et al. (2021), can be made.
NN approaches have also become popular and largely adopted by researchers outside the structural optimisation field. Probably, due to the lack of knowledge or insight into TO, partly due to simple access to NN and GA schemes and partly due to reviewers that are not aware of TO advances, there is a rapidly growing trend for such papers in physics oriented journals. Examples are Abueidda et al. (2019); Chen and Gu (2020); Gu et al. (2018); Kim et al. (2021b), that solve typical linear TO problems on coarse grids for crack-propagation and Jiang and Fan (2019); Jiang et al. (2021), that solve nano-photonic grating problems.
Abueidda et al. (2019) and Gu et al. (2018) trained a CNN to predict the mechanical properties of a two-phase (soft or stiff material) chequerboard composite material to replace the need for FEA within a GA optimisation framework. Kim et al. (2021b) proposed an extended framework incorporating active learning such that the predictor can adapt to the specific problem considered, during optimisation. The additional data samples used in this iterative transfer learning are obtained by validating the selected solution pool, obtained by convergence of GA using the DNN for function evaluations, by FEA. The true target values for these, ideally well-performing, composites are then known and can thus be used to fine-tune the DNN before the next GA run.
Chen and Gu (2020) proposed a general-purpose inverse design approach utilising a predictor-designer DNN-pairing. The predictor is trained to approximate a physics-based model or complex function and the designer utilises this learned mapping to perform optimisation of some specified desired properties. An integrated feedback-loop allows for continued improvement of the predictor as a response to the output from the designer. Maximisation of toughness in a 2-phase composite material subjected to individual base material volume constraints was presented as a case study of the presented framework. A fixed discretisation of 16x16 elements is considered, and for three different volume fractions one million composite designs are sampled and their toughness evaluated by FEA to form the dataset. 800,000 of the samples for each volume fraction are used for training and 200,000 for testing. From the active learning from the feedback loop mechanism, new training and test samples of higher value toughness are evaluated by FEA and added to the dataset during optimisation.
Inverse homogenisation and composites Inverse homogenisation (Sigmund 1994) and design of metamaterials is another rapidly growing application area of AI in TO - not only in structural applications but also e.g. in optics and nano-photonics (Jiang and Fan 2019; Jiang et al. 2021). A feature of inverse homogenisation and meta material design problems that may make them better suited for AI approaches compared to structural problems is the limited number and position independent nature of load cases for such problems. Typically, in order to e.g. determine effective mechanical properties of a periodic material, just three load cases are needed in 2D and six in 3D, which in each case are independent of the design and geometry of the unit cells. Hence, the need for training data is significantly reduced. At the same time, however, variability in the outcome is also significantly reduced raising the question of whether an AI-approach is even needed for such problems. For example, there is no need for complex training if the goal is to provide stiffest possible microstructures for given macroscopic stress fields. In this case, analytically optimal multi-scale microstructures, rank-N laminates, are known and can be converted to simpler single-scale microstructures with little effort and loss as described in e.g. Träff et al. (2019).
Similarly to direct design AI-applications for structural TO, Kollmann et al. (2020) trained a CNN to achieve iteration-free TO by predicting the optimal material layout directly from given problem-defining parameters for grey scale microstructure design problems. Wang et al. (2020) developed a VAE-ANN pairing to transform the inverse design problem for unit cell solid-void microstructures to sequences of simple vector operations in the latent space. The VAE is for this purpose trained to achieve a smooth latent space capable of representing geometric information about different microstructures. Sui et al. (2021) employed reinforcement learning to automate the design process of digital materials and Garland et al. (2021) used a CNN to predict properties of solid-void lattice materials, both to be incorporated within non-gradient GA frameworks.
As the microscale design problem offers reduced design freedom compared to structural TO, utilising a large number of training samples to train a direct design-like ML-application increases the likelihood of training and test-data overlap. Therefore, the measured performance of such ANN-frameworks may be questioned. The ability to extract geometrical families as in Wang et al. (2020) is, however, a beneficial trait of the presented approach. The works utilising ANNs to remove the need for FEA within a GA framework claim success based on the NN’s ability to outperform conventional GA for problems with very few design variables, ignoring the large number of training samples used and the computational effort this entails. Utilising several thousands of samples to train a NN to speed up the optimisation of a 7x7 element mesh by claiming negligible training time gives a disproportionate representation of actual gain as a large part of the full solution space will be covered already in the training set. As such, the presented results do not actually prove the claimed viability of such GA frameworks. Further, these observations tie into how these works are found to suffer from similar issues to those discussed for other direct design approaches.
Guo et al. (2021) presents a more comprehensive overview of how ML has been applied within the field of material design in general. These developments are covered with great optimism, but the authors also highlight the common treatment of ML-models as black-box solvers for complex problems. Related to this, the review also observes that treating material design as image-to-image mappings, similar to the direct design applications for structural TO in the previous section, is widespread within this field.
Multiscale TO Multiscale TO (MSTO) is the approach of obtaining both the optimal structural topology on the macro-level as well as the local microstructure material layout (Wu et al. 2021). In fact, this was the approach used in the original works on topology optimisation by Bendsøe and Kikuchi (1988) and Bendsøe (1989). In Bendsøe and Kikuchi (1988), effective properties of near-optimal rectangular hole microstructures were precomputed and interpolated, whereas they were computed analytically for optimal so-called rank-n microstructures in Bendsøe (1989). Recently, several works have used AI to learn the effective properties of various micro-architectures, effectively replacing the interpolations or analytical expressions from the original works (Kim et al. 2021a; White et al. 2019; Yilin et al. 2021; Zheng et al. 2021a; Wang et al. 2022; Elingaard et al. 2022; Chandrasekhar and Suresh 2021b; Chan et al. 2021; Wang et al. 2021d). With such off-line computations, either analytical, interpolated or learned, very efficient MSTO algorithms can be constructed. The challenge of ensuring connectivity between local microstructures is taken care of by imposition of periodicity, which results in simple geometries but possibly deteriorated performance (Wu et al. 2021), by mapping techniques (Kim et al. 2021a; Chan et al. 2021; Wang et al. 2021d) or by special microstructure parameterisations that by construction satisfy connectivity (Zheng et al. 2021a; Wang et al. 2022; White et al. 2019; Yilin et al. 2021), but do not necessarily meet the theoretical bounds.
Kim et al. (2021a) and Chan et al. (2021) utilised an ANN to model material properties for functionally graded composite structures. White et al. (2019) utilised an ANN to model the elastic response of the microscale material within a gradient-based MSTO framework where the parameters describing the local microstructures were used as design variables. Yilin et al. (2021) similarly proposed a CNN for predicting the effective elasticity tensor and its gradients for voxel-based non-parametric microstuctures, and Zheng et al. (2021a) for spinodiod microstructures. Wang et al. (2022) proposed a data-driven TO approach to multiscale cellular design for natural frequency optimisation including multiple choices for microstructure classes. By defining a finite set of different material choices, Chandrasekhar and Suresh (2021b) integrated a multi-material blending scheme in the previous ANN reparameterisation approach for TO (Chandrasekhar and Suresh 2021c). Da et al. (2022) used an ML-inspired sampling procedure to construct a database of microstructure unit cells integrated in an approach to produce connected microstructures for indirect control of fracture resistance. Wang et al. (2021d) trained an ANN as a surrogate for modelling the geometry-property relation for parameterised microstructures to avoid homogenisation analysis during optimisation, while Elingaard et al. (2022) utilised a CNN as a surrogate for conventional de-homogenisation procedures.
The idea of using AI approaches to provide effective properties for multiscale approaches seems promising, especially for more complex non-linear problems where CPU-heavy path-dependent microstructure simulations would render a full multi-scale approach extremely expensive. Here, a costly off-line training at the microstructure level will be compensated in the form of much more efficient overall modelling and optimisation procedures.
3 Assessments
An overview of the works implementing AI-methods for use in TO was given in Section 2. Within each of the presented application-categories several challenges and disadvantages were identified and discussed. This section will elaborate on some of these issues. First the importance and requirements for computational costs and generality of method applicability will be discussed followed by an assessment of the quality of solutions obtained and presented in the literature.
3.1 Computational cost and applicability
Disregarding the quality of obtained solutions, this section will focus on the overall merit of the different approaches in terms of the generalisation ability and associated computational costs. The motivation behind this focus is that the range of problems for which a model is applicable and the computational effort associated with generating training samples, running the learning algorithm and applying the proposed procedure to obtain a solution are factors strongly influencing the actual usefulness of the suggested framework. If a solution method is computationally expensive to prepare and tune and can only be applied to very specific problem cases, as seen for most of the direct design applications, it is not likely to provide any benefits regardless of the solution quality. Whether the structural results are promising should only be a determining factor in the evaluation of a method that offers a sufficient balance of speed-up and generality.
The computational cost of a method is not only related to the actual solution time, but time spent on collecting data and training might also have a significant impact as the computational cost of a conventional iterative TO solution procedure is typically what AI-technology is aimed at reducing. For instance, Nakamura and Suzuki (2020) sampled 333,000 TO-optimised structures as training and validation data. This means that their resulting direct design model should be applied at least 333,001 times to similarly sized problems for any actual speed-up to be gained. Due to the need for target samples, examples of good-quality solution structures to different problems, this holds true for any direct design model developed utilising a (semi-)supervised training approach.
If the range of problems the trained model is able to handle is extensive, an expensive training process becomes less concerning, but should still be a factor. Given a very large dataset, even a naive ML-model may perform well on a range of new problems. Consider a model which simply finds the example from the training data which is the most similar to the new problem, and returns this example’s corresponding solution. In this case, the larger and more diverse the database known by the model, the better it will perform for most test cases. However, if a new problem has a significantly different optimal solution than any of the training samples, a new data sample similar to the new problem must be obtained by optimisation and added to the model’s database before it is able to solve the problem. Thus, the model is not able to learn such that it can predict anything new. Indications of this behaviour could be seen for the direct design model for fixed supports proposed by Yan et al. (2022), where the predicted results for the test-cases resemble those optimised by SIMP in overall composition, but some of the predicted solutions to test instances were missing material where the load was applied. This could indicate that the test case corresponded to a small shift in load locations compared to one of the training instances, resulting in an infeasible solution, and implying that the model had not learned the significance of applied load positions.
Considering the different application categories the threshold for achieving actual speed-up can be reduced in that the data needed is of a different, easier-to-obtain, nature or by increasing the degree of unsupervised learning when training the model. There are, however, still some non-direct design approaches that require computationally expensive training. Lin et al. (2018) and Sosnovik and Oseledets (2017) utilised a direct design-like model to directly map from an intermediate structure obtained by SIMP to a converged structure. Thus the proposed approaches also require training data consisting of a large number of conventionally optimised structures, and with the added computational cost of performing SIMP iterations to reach the intermediate designs for new problems, not much is gained in terms of solution time speed-up.
Keshavarzzadeh et al. (2021a) suggested an approximate way of computing the breakeven threshold for how many problems and AI-based solution framework must be applied before any actual gain in speed-up is obtained. This measure is obtained based on the computational cost in terms of FEAs needed for both obtaining the training data and executing the proposed procedure. It is not an exact representation of the computational costs as the use of optimisation algorithms in both the training of the network and the completion of the procedure may infer additional notable costs. Further, the computational cost of FE-analysis is computed as an approximative function of the number of elements in the FE-grid. The considered formula does, however, allow for comparing several different approaches and problem sizes in a relatively fair manner.
Let \(\tau \in {\mathbb {N}}^{+}\) denote the desired breakeven threshold (i.e. the number of optimisations that must be performed before the considered method outperforms conventional TO methods) and \(C_{train}\) the computational cost of training. Given the computational cost of solving a problem over an FE-mesh of \(N\in {\mathbb {N}}^{+}\) elements using both SIMP, \(C_{SIMP}(N)\), and the proposed framework, \(C_{AI}(N)\), the threshold \(\tau\) can be computed as in equation (1).
For the direct design models reviewed in this paper, the breakeven threshold is commonly equal to the number of training samples used. This is because the mesh size N is approximately (or exactly) the same for the training samples and the problem formulations for which the model is applied and, as FEA is not needed to execute the suggested AI-framework, one obtains \(C_{AI}(N){=}0\). This mesh dependency is not represented in the given threshold computation, but is still a significant factor in terms of determining whether a proposed solution framework will be a reasonable alternative to conventional methods. If, for instance, a method that has a medium-level breakeven threshold, is restricted in terms of mesh size and dimensions and is focused on a limited set of boundary and load conditions, the perceived breakeven threshold might actually be much higher. This is because with limited applicability, there might not exist more than \(\tau\) relevant problem cases that one could ever wish to solve.
Such considerations relate to the generalisation ability of a method. Judging the exact generalisation ability of a method can be challenging, but the aim should be to develop solution procedures that are as close to universal in terms of problem definition as well as mesh dimensions and resolutions as possible. Ideally the method should at the least be applicable to different sets of loads, boundary conditions length-scales etc. within the current problem setting. Further, it would be beneficial if the model is easily extendable to different objective functions and constraints as well.
Fewer limitations of model applicability imply greater generalisation ability. However, it is not necessarily expected that a useful application offers a universal solution approach to any problem. This is likely neither realistically achievable nor a quality found in conventional methods. The traditional TO methods are inexact in nature, relying on many different parameter settings, filters and search algorithms. One chosen combination of these is not likely to achieve universality and successfully solve any imaginable problem formulation. It is however possible to fit most problem formulations to the required “inputs” for conventional methods, and in many cases one can achieve satisfactory results with little parameter tuning. It is therefore fair to expect that e.g. a change of physics or constraints require retraining. However, for the purpose of pure compliance optimisation, one should assume that a single model setting is realisable. Generalisation ability can therefore relate to both the direct applicability of a method and its transferability. Transferability refers to how easily the model can adapt to new problems by changing parameters or network architecture, while still achieving good results.
To present an idea of how computational cost and generalisation ability compare for some of the key concepts presented in the literature, the breakeven threshold (1) from Keshavarzzadeh et al. (2021a) is first adapted to approximate computational costs for a greater variety of applications.
For computing the breakeven threshold an estimation of computational cost associated with performing one FEA for a problem meshed using N elements is defined by \(C_{FE}(N)=N^2\). This is based on the computational order of \(O( bw ^2m)\) associated with solving a linear sparse system with a \(m \times m\) coefficient matrix and bandwidth \(bw\). Assuming that for a 2D linear elasticity FE-problem discretised using 4-noded rectangular elements with equal number of elements in the x- and y-direction, \(n_x=n_y\), the number of equations is given \(m=2(n_x+1)(n_y+1)=2(n_x+1)^2\). Further, the best case node-numbering of such a mesh achieves a bandwidth of \(bw =n_x+1\), and the number of overall elements N is given \(N=n_x^2\). Thus, the process of solving this system is of computational complexity \(O( bw ^2m)=O((n_x+1)^4)=O(N^2)\), which is used directly as the estimate for completing one FEA.
Let \({\overline{N}}\) denote the set of considered mesh resolutions, \(s^{method}_N\) the number of samples at mesh size \(N\in {\overline{N}}\) needed by the method and \(t^{method}_N\) the average number of FEAs the method uses to obtain a sample at mesh size N. Based on these definitions the computational cost of a method can be computed by (2).
The computational cost of obtaining the training dataset can thus be computed given the different mesh sizes considered, the needed number of samples for each mesh size and the cost of obtaining a sample at each mesh size. \(C_{train}\) is as such the sum of the computational cost associated with obtaining each training sample, while \(C_{SIMP}(N)\) is the cost of the average number of FEAs needed by SIMP to solve a given test problem of size N. \(C_{AI}(N)\) depends on the specific framework considered. For direct design models this cost is zero, for post-processing upscaling methods this cost usually corresponds to \(C_{SIMP}(\alpha N)\) where \(\alpha <1\), while within the acceleration category this computation varies considerably between the individual applications. As this measure is still approximative it is not the exact threshold value that should be of interest, but the order of magnitude which is believed to be appropriate even with different estimations for \(C_{FE}(N)\).
For quantifying the generalisation ability of the applications no corresponding measure is available. Therefore a set of criteria are developed to manually judge the perceived generalisation ability of an application based on method description and presented results. These criteria are listed in Table 3, and relate more to the range of possible problem applications than the actual performance in terms of solution qualities. Poor results, in terms of structural disconnections or difficulty adhering to the constraints, do in practice have an influence on the generalisation ability, as the models should be able to feasibly solve the intended test problems. However, to limit the level of subjectivity in the generalisation score, this is not accounted for.
The generalisation ability for a method is calculated as a weighted sum of the levels across the four categories in Table 3, and is as such subjectively judged on a scale from 0 to 36. From the given weights, the main determining factors are mesh dependency and the variety of viable problem definitions the application can handle (category 1-3). As such, a solution framework is appointed a low generalisation ability if it is developed for a fixed FE-mesh with training and test problem instances limited by fixed boundary conditions, while a high score is allotted if there is no mesh dependency and the application is believed to work for any reasonable boundary conditions. The fourth category relates to the similarity between the training and test data-sets, as to penalise instances where no direct effort is put towards making these clearly distinguishable. Generally, this is a very important factor for any ML model, as overlaps between test and training data are likely to lead to inflated performance measures, overestimating the capabilities of the model. This factor is still given a lower weight in this specific assessment, related to the choice of differentiating more between generality and solution quality. The overall purpose of this quantification of generalisation ability is not to serve as an absolute and true instrument for evaluating AI-based solution methods in TO, but rather as a measure for illustrating the current state of the field and how the application categories compare.

Comparing, for different methods in the reviewed literature, the perceived generalisation ability along the x-axis to when speed-up is achieved, by the breakeven threshold \(\tau\), along the y-axis. The datapoints are coloured based on the application category to which they belong
Figure 5 illustrates the breakeven threshold compared to the perceived generalisation ability for a selection of methods in the literature reviewed. It is noted that only literature providing sufficient information to estimate the computational cost is considered. Further, only methods that are directly comparable to conventional iterative solution methods like SIMP are included. Therefore the presented applications belong to the direct design, acceleration or upscaling categories, which is illustrated by the different marker colours. The dual-coloured scatter points indicate that the associated solution framework is a hybrid between the two corresponding categories. For instance, Li et al. (2019) used a direct design model to directly predict an optimised low-resolution structure before applying upscaling to achieve the final desired structural layout. Chi et al. (2021) and Kallioras and Lagaros (2021) both utilised upscaling as an integrated part of the acceleration-based iterative procedures proposed.
As both presented measures, breakeven threshold and generalisation ability, are approximative, the datapoints are in general not explicitly linked to the corresponding works in the presented figure. It is however evident that solution methods belonging to the direct design category perform worse than the other alternatives as seen by their high breakeven thresholds and low generalisation abilities. The best scoring direct design model (Zheng et al. 2021c) is given a higher generality score than the other similar approaches due to the incorporation of zero-padded buffers in the network input format to allow for different mesh dimensions and resolutions. However, due to the only guaranteed difference between training and test data being the mesh size and the limited sample space for problem characteristics, it is still seen as having a low generalisation ability. The lower breakeven threshold is obtained by considering overall finer mesh discretisation for the test problems than for the training problems. Even though 7,500 optimised structures are used for training, the breakeven threshold is approximated to be lower than 1,000.
For the acceleration and upscaling categories the performances are more varied across the different approaches, where worst case is similar to the poorest of the direct design models while best case approaches a negligible breakeven threshold and high generalisation score. Two acceleration-based methods are given the lowest generality score, both due to the restricted problem spaces considered. The first (Lin et al. 2018) restricts the problem to a small, fixed mesh, 2D thermal conduction problem where only the volume fraction, heat source and sink are varied. One of the two highest breakeven thresholds for the considered acceleration-methods is also reported for this model, linked to the use of SIMP paired with a direct design-like model mapping an intermediate solution to a final design. The second (Qian and Ye 2021) has a significantly lower threshold because ANNs are used for objective and sensitivity predictions within a conventional SIMP framework, such that fully optimised designs are not needed for training. In terms of generality, the model is, however, trained and tested considering a set of fixed boundary conditions with different single-point loads, resulting in a poor performance.
The overall best scoring work is that of Chi et al. (2021) which has a breakeven threshold close to zero and is given a generality score of 36. As the method is based on a concept of online learning integrated in a two-scale optimisation procedure no cost is associated with pre-training of the model and the overall computational cost to achieve an optimised structure is lower than that of conventional methods, and thus a speed-up is achieved regardless of how many times the model is used. This approach is also what makes the degree of generality so high, as the network input and output format can be adapted to each individual problem.
There are some promising works that exhibit great generalisation abilities but are not included in the evaluation in Fig. 5 due to deficiencies in reported computational costs. This holds true for most of the reduction-category frameworks. The relevant works apply an ANN for reparameterising the geometric representation and optimise a given topology through online training of the network. This means that the network model in itself is independent of the boundary conditions, but adapts to the given problem during optimisation similarly to a conventional TO process. As such, there is little to no computational cost associated with offline data collection and network training, contributing to a lower breakeven threshold. Further, the generality of these frameworks is expected to be high in terms of solving different problem formulations. Zhang et al. (2021b) exemplified this by applying their proposed method to minimum compliance problems (both with and without stress constraints), compliant mechanism design and a 2D heat conduction problem. An extended framework for nonlinear elasticity was also proposed and tested. The complications with assessing such reduction methods arise from the fact that FEA is still needed for the full mesh in each iteration, as it is required for evaluating the loss function of the ANN. As FEA is the most expensive operation in conventional topology optimisation (and used here for approximately measuring speed-up), the gain in computational efficiency of such methods rely on a reduction in the number of iterations needed to reach convergence. Such behaviour is observed for some selected comparisons to SIMP reported in the literature, but no extensive analysis allows for conclusive judgement.
3.2 Solution quality
After having assessed the merit of the different solution frameworks in terms of generalisation ability and computational cost as in Section 3.1 evaluation of solution quality in terms of structural performance should be included as a third dimension for judging overall performance. Overall it is deemed that any model with higher breakeven threshold and lower generalisation ability should be disregarded regardless of solution quality. However, as most of the works represented by data-points located in the top left of Fig. 5 describe direct design models, it is worth noting the problematic solution qualities discussed in Section 2.1 and the common occurrence of disconnections as in Fig. 4.
For the remaining works, for which the combination of generalisation ability and breakeven threshold is considered reasonable, the solution quality and speed-up are the integral measures of quality. Speed-up here refers to the actual solution time, and thus, provided a trained model and solution framework, the reduction in computational cost of solving a problem compared to conventional state-of-the-art methods. Therefore, it would be desirable to evaluate methods in a similar manner as in Fig. 1, but now for mechanical performance and solution time.
It is found that a majority of the papers do not present performance metrics allowing for fair quantifiable comparison of results. There are several different reason for the presented results not being suitable for assessment. Firstly, there is a tendency to only present the mean value of the selected performance metrics for the test instances, or to only present the results for a few illustrative problems from the test set. Such formats for reporting results may not be representative of the full distribution of performance across the entire set, potentially hiding outliers for which very poor performance is observed. Secondly, the overlap between the training and test sets may be large, by i.e. randomly sampling from the same restricted pool of problem combinations, which is likely to overestimate the performance and not be representative if different problem characteristics are considered. Thirdly, the choice of performance measures are often related to pixel-wise density errors only, neglecting to evaluate the actual structural properties of the obtained structure. Lastly, the comparison to conventionally obtained benchmarks is not done in a fair manner. Many works compare the obtained results, in terms of relevant measures such as structural compliance, to grey scale structures obtained by SIMP using a large filter radius. It was shown in Fig. 4 how compliance is reduced significantly when the structure is thresholded to a solid-void design. Further, a large filter radius means that the structure will contain fewer fine features, which may influence the structural performance of the resulting design negativelyFootnote 1. Also, as several of the proposed frameworks do not contain mechanisms for directly enforcing the volume constraint, this is also an important property, as more material results in lower compliance. Inspired by these challenges, and to allow for future fair comparisons of quality, recommendations for how to test the model will be given in Section 5.2.
Many applications within the upscaling and acceleration categories exhibit similar problems in terms of the solution quality assessment, based on the reported experimental results. Firstly, very few coarse grid cases are considered for testing, and in some cases they are very similar to training. Secondly, the reported results tend to focus on average elementwise-density errors which means that quantitative assessments of actual structural performances and expected worst case behaviour are prohibited. Generally, illustrations of the obtained structures, for selected test-instances, using both conventional and AI-based methods do, however, show a high degree of grey scale and tendencies for disconnections. The frameworks including features of upscaling tend to yield blurry boundaries resulting in structures without the fine features of those obtained by conventional methods, due to length-scale restrictions provided by the coarse mesh. Xue et al. (2021) showed the only noticeable occurrence of the AI-based method obtaining a structure with finer features than those obtained by SIMP. These structures also exhibited lower compliances than the corresponding benchmarks, but as the benchmarks were obtained by enforcing a large filter radius, it is unclear whether the results are better than what can be obtained by SIMP overall.
The reduction category applications are typically tested on a wider range of problems and mesh discretisations, but the results presented tend to lack transparency as for the above-mentioned methods. A clear benefit is that the obtained structures appear to have a smoother and sharper structural representation than the presented solutions within the other highlighted categories. As regular FEA is used to extract the structural geometry for analysis, this feature is, however, not utilised in a beneficial manner. What is also prominent is the loss of finer features, compared to conventionally obtained solutions to the identical problems. This loss in detail could, in some cases, be a consequence of the reduced geometric representation not being able to describe the more complex features. A reason for fewer iterations needed in these reduction-based procedures could therefore be related to the size of the feasible solution space. Optimised structures illustrated in Deng and To (2021) do indicate that capturing the finer features is achievable with a larger number of hidden layers. Zhang et al. (2021b) argued that the thicker structure with fewer holes is an advantage of their proposed method as these properties make the structure easier to manufacture. Here it is relevant to note that one easily can reduce the fine features resulting from SIMP by increasing the filter radius or lowering the mesh resolution, and that several strategies for achieving length-scale control and manufacturability have been reviewed in Lazarov et al. (2016). In fact, for the MBB-beam example presented in Zhang et al. (2021b) a similar structure with a lower compliance can be achieved by considering a coarser mesh when applying SIMP for optimisation (Fig. 6a), and then upscaling the optimised structure using the imresize image-scaling procedure in Matlab with bicubic interpolation, before applying a volume preserving threshold to obtain a 0-1 design (Fig. 6b). The corresponding Matlab-code for performing this sequence of operations is found in Appendix A. Doing so decreases both the computational cost of FEA in each iteration, as well as the number of iterations needed (Fig. 6).

A solution to the MBB test case from Zhang et al. (2021b) obtained by optimising on a coarser grid (a), resizing the image using Matlab built-in function with bicubic interpolation followed by volume perserving thresholding (Sigmund and Maute 2013) to obtain higher resolution solid-void structure (b)
4 AI limitations
State-of-the art ANNs have achieved a level of pattern recognition abilities exceeding human abilities. This development has been made possible by the availability of massive sets of labelled data and increased computing power. High-level ANNs contain tens or hundreds of hidden layers and are trained utilising high-performance GPUs and hundred of thousands to millions of data samples. For instance, AlexNet, the first ANN to adopt an architecture consisting of consecutive convolutional layers and a leading model for object-detection, was trained on 1.2 million labelled data samples and has obtained the ability to recognise 1,000 different objects (Krizhevsky et al. 2017). An ANN learns directly from the provided data with limited human influence on what it learns. These models are powerful tools because they allow for a complexity enabling pattern recognition that is not explicitly defined by human understanding. Successful application of these models do, however, often rely on carefully curated data, and the measured accuracy of an ANN is typically measured using standard benchmark datasets. The measured accuracy depends greatly on the nature of the chosen test data, where greater similarities to the training data implies a higher measured accuracy (Goodfellow et al. 2018).
The current leading deep learning technology is fundamentally brittle, as it breaks in unpredictable ways when exposed to unfamiliar domains (Heaven 2019). A small perturbation or added noise to input samples may lead to incorrect predictions with high confidence and the same input is able to break a wide variety of model architectures trained on different datasets (Kurakin et al. 2016). Such failures are strongly related to ANNs not actually understanding the world or comprising any knowledge of salient features, which are core factors in human recognition. ML-models are traditionally developed under the assumption that the environment it is operating within is benign both during training and validation and that the sample-space distribution is the same as for the training data in any future tests. There exists measures for increasing the robustness of ANNs in form of data augmentation (Goodfellow et al. 2016) or adversarial examples (Kurakin et al. 2016), but increasing robustness against one type of error could weaken the model against others. It is commonly believed that augmentations to the current model-framework providing additional reasoning abilities could aid in overcoming this brittleness (Heaven 2019).
When utilising these frameworks to solve different tasks it is therefore important to be realistic about what the possible capabilities of any ML-model are. Many of the articles included in this review appear to overestimate the abilities of current ML-technology, ignoring that these models simply are complex versions of regression and classification and treating them as some black-box “magic” solver able to handle any complex task.
The direct design approaches are often based on generative methods (e.g. GANs or VAEs). The assumption of such methods is that the output should belong to a specific distribution, and generative methods aim at generating outputs (for instance a 2D or 3D image) that belong to such a distribution. In practice, generative methods, and most CNN-type networks, often learn a mapping from a latent space of much smaller dimension to the output image. It might seem reasonable to assume that one could simply interpret (or map) the boundary conditions for a TO problem as (or to) a point in the latent space which is subsequently mapped directly to a mechanical structure using a mapping that is learnt from examples. Given sufficient examples, one might expect this to work. Unfortunately, there are good reasons to believe that such strategies will always fail. The main reason is that relatively small changes to the boundary conditions can lead to a very different solution being optimal. Thus, any learning-based approach would face the challenge that a small perturbation of the boundary conditions could lead to a big change in the optimal structure. Unless the types of problems that can be solved with a hypothetical direct design approach based on a generative method, are strictly limited, it is clear that an unbounded number of examples could be necessary to learn all the discontinuities in the mapping from latent space to mechanical structure. An example of this is illustrated in Fig. 7, where the problem described in Fig. 7a is optimised for two single-point load cases. The first case describes a vertically applied load, and the obtained structure is given in Fig. 7b. For the second case the applied load is applied at a slight angle and the optimised structure is now given in Fig. 7c.

Test-case illustrating the potentially significant effect small changes in boundary conditions can have on the optimal material layout. The boundary conditions (a) with corresponding optimised 0-1 designs for (b): \(F_x{=}0,\;F_y{=}1\) and (c): \(F_x {=} 0.0099998,\;F_y {=} 0.99995\)
The difference between the optimised structure of the first and second considered load case is that the first is simply one vertical bar to counteract the applied load, while the second has an additional thin bar to also supply support in the horizontal direction. Table 4 compares the compliances of these two optimised structures when they are subjected to each of the two load cases. It becomes evident that the small load-angle perturbation results in a collapse of the first structure (Fig. 7b) while the second structure (Fig. 7c) performs similarly in both cases.
Further arguments could be made about the individual element-density time-series acceleration approach proposed by Kallioras et al. (2020) also suffering from the lack of understanding of physical properties. For many problems, it is plausible that the iterative history of element densities will map to a reasonable structural composition, but this cannot be guaranteed for all problems. As the model does not know the relations between neighbouring elements there is no guarantee that even a smooth structure will emerge when combining the individual predicted trajectories. This is not to discourage that simple mappings between intermediate solutions in the optimisation process may aid in faster convergence, especially as SIMP iterations are run on the mapped structure to ensure physical consistency in the final design. One should however be cautious of the fact that this does not guarantee increased performance, and especially not for problems with moving members during the later iterations.
The approach of reducing the number of exact high-resolution FE-solutions in a multi-scale framework proposed by Chi et al. (2021) might be a more rewarding application of approximate mappings. During several iterations of the TO process, approximate sensitivities may be sufficient to make progress in the overall optimisation, as also investigated for conventional TO (Amir and Sigmund 2011). Therefore, understanding the problem may not be necessary to perform this task, and errors in the predictions are less likely to have major effect on the overall results. A fast increase in prediction errors as a function of the number of iterations since the last exact sample may indicate that model-improvements could be fruitful.
The upscaling category on an overall level likely suffers from similar lack of physical understanding as the direct design models. It is observed that the applied models mainly perform boundary smoothing, which is understandable if the mapping between resolutions is simply seen as an image-resizing task by the ANN. The work of Elingaard et al. (2022) is an outlier within this category, as here the ANN is utilised to perform de-homogenisation. As physical understanding is not necessary to translate the input vector-field to an intermediate density field the abilities of ANN to perform pattern recognition may be very useful in such an application. However, it is found that the post-processing procedure utilised could benefit from some alterations to replace the u-shaped branching with v-shaped ones, which are known to provide better structural performance.
5 Recommendations
The motivation behind implementing an AI-model to be used in TO should rest on some belief that it will improve the overall solution framework, compared to conventional procedures. As the limiting factors for large-scale TO are related to memory consumption as a result of the design representation and computational time associated with the calculations required in the applied iterative solution procedures, the aim should be to reduce the cost of at least one of these challenges without compromising performance with respect to the other. Scientific contributions are only significant if they increase the scope of viable applications. This could be solving any problem faster than conventional state-of-the-art approaches or extending the range of problems that can be solved, both in terms of size and complexity.
These statements are not to diminish the value of proofs-of-concept in a new application area of AI, but there should be convincing arguments and proofs supporting the capabilities of the presented ideas. Such considerations should focus both on how the method compares to current state-of-the-art and the range of problems that can be handled appropriately. New solution procedures should be accompanied by convincing descriptions of why they contribute positively to the scientific progress within the field. If insufficient results are obtained, a thorough reflection of why the motivating hypothesis or method-construction was wrong would be of great benefit for the field moving forward.
AI-technology has become an immensely popular research topic due to the prospective abilities of methods within the field. It is however important to recognise that the current capabilities of even state-of-the-art applications are limited and susceptible to errors. The application area of such models should therefore be robust with regards to possible model errors not having significant negative effects on the system as a whole. Further, the tasks at which existing technologies excel are limited and mostly related to pattern recognition. Methods such as neural networks are good at data reconstruction and feature extraction, but are insufficient when it comes to higher level understanding and data interpretation. This again is not to discourage research focused on applying AI-methods for TO. The combined choices of model types, model-configurations and applications are endless, and successful choices may provide meaningful contribution to scientific progress. To approach such useful choices one should however ensure understanding of the different model choices and practice critical evaluation of both the potential and longevity of the modelling framework itself, as well as the observed performance through testing.
Based on the ideas and results observed in the current literature, this section will therefore provide what is believed to be basic but useful guidelines for researchers interested in pursuing different application of AI in TO. To this purpose recommendations for what to consider when developing a model as well as how to properly assess its resulting performance are listed in the following.
5.1 When designing the model
When choosing a model type and its configurations the aim should be to determine which settings are likely to perform best for the intended application. With AI-methods this can be difficult as model design is not an exact science, but efforts should still be made to research different options and how they have successfully been applied in other fields. Doing so, it is also paramount to account for all aspects having an influence on the problem at hand, and remembering that relational properties should be provided to the model as one cannot expect the model to magically realise the environment it is applied within. Some concrete comments on the choices made in the current literature will highlight how such challenges can manifest, but as this very much is a new and open research field a complete guide cannot be provided.
After having identified the desired task, efforts should be focused on determining appropriate inputs, outputs and loss function. The analysis of breakeven threshold and generalisation ability in Section 3.1 illustrates the effect of data formatting on the computational performance of the model. It is found that in current works the training data generation requires a high computational cost which is often incorrectly deemed negligible. It is fair to assume that the more versatility the obtained model can provide, the more training time one can justify. However, most of the reviewed works having greater generalisation abilities typically present methods that have lower training costs. The reason for this is likely related to the fact that cheaper training data often is more removed from any specific problem instance, such that patterns the model learns from are relevant for a wider variety of cases.
The chosen model output is therefore a deciding factor in the model design phase. These outputs should be realistically attainable by the chosen model and preferably in a format that allows for a wide range of problems and mesh dimensions. Further, it is beneficial if benchmark targets can be computed somewhat efficiently as to evaluate the accuracy of the output. This means that neural networks aimed at directly predicting an entire output structure like the described direct design models might be unrealistic and very limited in terms of generality. Another limiting effect of using optimised structures to train the model is that it is likely to be influenced by the nature of the conventional solver used and the select set of parameters, where for instance using a larger filter radius to obtain the training samples may result in the model never considering finer features as optimal.
The formatting of the input and loss function is also an important aspect, as the information contained should, ideally, be sufficiently able to describe the unique properties of a considered problem instance, such that there is a believable relation between the input and the output. The input should allow for different problem dimensions while the input dimensions are kept limited to reduce the size of the network. Therefore it is recommended that greater efforts are made towards defining an appropriate loss function to capture more complex system relations.
These aspects means that one should seek more complex loss functions relating more to physical properties that require FEA in the evaluation of results and less to image-based prediction error. The norm should be to move away from designing mesh and boundary condition specific models and towards more adaptable frameworks than what is seen in most of the current literature. Further, it is recommended to consider automated post-processing as a valid option to refine the final structures to i.e. limit the occurrence of disconnections. In many cases this can be done in an inexpensive manner, such that the computational time is not significantly affected.
Overall, the most important reflection points are related to how many different problem types or settings the method can handle without retraining, while supplying good-quality results.
5.2 When testing the model
When testing the model the aim should be to accurately determine whether the performance for the intended task is sufficient. This relates both to the statistics presented for model evaluation and the benchmarks used for comparison.
Figure 4 in Sect. 2.2 proved how the pixel-based density error is not an appropriate error measure when evaluating structural performance, as a small pixel-based error may imply good performance even for disconnected structures. Image-related error measures in isolation say more about the exactness of the reconstruction than whether the approach was successful in solving the TO problem. The physical performance of the obtained solution in terms of the desired properties defined by the optimisation objective and constraints should therefore be the main focus. When testing the model on several problem cases it is also crucial to include the entire distribution of the obtained results. This is to ensure that worst case behaviour is identified, because in structural design, even one insufficient solution can have detrimental consequences.
In terms of benchmarking it is both important to ensure the desired test cases are notably different from all cases considered during training and that the comparison to conventional methods is done under fair circumstances. Firstly, this means that it is not sufficient to test on random problems that are sampled from the same limited pool as the training data. Secondly, it should be assured that the two compared structures are defined on the same length-scale and thresholded to a black-and-white design, satisfying the same volume fraction. Some of these latter requirements might differ depending on the considered optimisation problem, but as most works are concerned with compliance minimisation subjected to a volume constraint, it is convenient to base the recommendation on this type of problem.
If comparison to other similar AI-based models is conducted, all aspects should be considered and one should aim at ensuring the same testing conditions. As such, similar problems should be solved, the same performance measures should be used and training time, including data generation, should be included in the assessment. If a larger number of data samples or longer training time is allowed, increased prediction performance may be observed without the model architecture actually being better.
5.3 Benchmark cases
The previous section exemplified how results should be presented and compared to conventional approaches for standard minimum compliance problems, and has encouraged proving performance for a wider range of problems. What has not been covered, however, is how appropriate problems for benchmarking should be chosen.
Constructing a set of specific benchmark problems that should be included to prove the validity of a conventional TO framework is difficult in itself, but for NN-based frameworks this becomes even more challenging as it also depends on how the NN is applied and what data is used for training. Firstly, if a model is trained on these specific benchmarks, then good performance for these problems is not an indication of the model’s general capabilities. Secondly, the different ways in which ANNs can be applied within TO further individualises what appropriate benchmarking is. Therefore, instead of presenting a finite set of problems to include, this section will cover some important considerations when choosing the test-cases for a specific ANN-framework and how to evolve from a proof-of-concept to certified state-of-the-art legitimacy of the proposed approach.
The basic The first level of difficulty for benchmark problems can be directly related to the definition of generalisation ability in Table 3, where the aim should be to justify the highest score possible. An approach for achieving a high score could be to select a small set of domain shapes different from the training problems and for each of these shapes consider separate combinations of mesh resolutions, supports and loads.
Based on how the ANN is integrated within the optimisation framework, i.e. what application category the presented model belongs to, there may be additional considerations that become important when benchmarking. If the ANN is used to perform a sub-task in the optimisation process it is of interest to assess performance for this specific task, in addition to how the overall optimisation procedure is improved. This means that for ANNs trained to perform FEA the accuracy of the obtained sensitivities should also be assessed. Approximate sensitivities could lead to good-quality optimised results, but the accuracy may still have effects on the reliability of the approach for future cases. Further, for convergence type frameworks mapping between intermediate designs to skip parts of the optimisation process, the output from the model, before continued iteration, is also of interest. This last point is of particular interest because if the achieved speed-up is the result of pixel-rounding or moving average type changes, one can avoid the expensive training and obtain more general frameworks performing equally well.
The issue of coarse mesh restrictions on the minimum length-scale of high resolution structures obtained by two-scale applications has been a prominent topic throughout the review. Assessments of this effect should thus be included for these methods. One potential approach could be to illustrate the underlying coarse mesh of the fine scale result. Restrictions on the complexity of the obtained structures were also evident for re-parameterisation approaches due to the reduced design representation and solution space. The question for such approaches could therefore be whether one can control the length-scale or impose local volume constraints to force fine features in the optimised structure (Wu et al. 2018).
Lastly, there are some works claiming that the proposed NN-frameworks are justified only for problems where conventional approaches are less efficient or effective. In such cases it is crucial that the provided benchmark cases belong to the problem-categories for which the framework is intended to be beneficial.
The generalisation ability measure includes no requirements about changes in problem definition (material parameters, objective function, constraints) or the scale of the different mesh resolutions. For developing new methods for TO it is not expected that one can instantly outperform state-of-the-art large-scale TO (millions of elements and constraints), but it strengthens the proof-of-concept to provide qualitative arguments for how the framework allows for future scalability and transferability.
The intermediate The basic benchmark-selection approach should be the minimum to illustrate the potential of a framework in a proof-of-concept manner, in addition to a fair qualitative justification of the method. The next step in proving whether the framework is competitive is to consider whether it allows for changes in the problem definition. This could be included by considering the same benchmark problems as from the basic approach, but now altering or extending the underlying optimisation problem.
Admittedly, the basic benchmark problems considered in the TO community have a tendency to be overly simplistic, e.g. by considering minimisation of physical performance subject to a linear volume constraint. This formulation allows for using bi-section algorithms for determining Lagrange multipliers and results in designs that are independent from base material stiffness. Similarly, in learning-based approaches, a formulation with a volume constraint makes training easier and results independent of material properties. For gradient approaches combined with flexible optimisers like the Method of Moving Asymptotes (MMA) (Svanberg 1987), switching the objective and constraint functions is straightforward. However, for a learning-based approach, especially aimed at direct design, training becomes increasingly challenging due to varying volume fractions of final designs and the need for quantitative evaluation of the constrained response function.
Hence, a challenging test case, with a high degree of industrial and practical relevance, would be to solve volume minimisation subject to compliance constraints. For additional complexity one could also consider solving for different material properties. For extending the problem one can consider additional constraints, such as additional compliance, displacement, local stress or local volume constraints. These changes are all readily implementable within conventional gradient-based frameworks and are thus important factors for judging whether the ANN-based method is competitive in a broader more applicable sense.
The advanced State-of-the-art TO has come a long way, and is now capable of solving large-scale problems with hundreds of millions of elements, millions of local constraints, a vast variety of alternative physics (a.o. thermofluidics, micro electro mechanical systems) and solved using unstructured meshes on irregular domains. The latter point is of particular interest as the reviewed NN-frameworks for TO exclusively consider regular meshes, which do not guarantee the necessary accuracy for practical applications. The ultimate end-goal for a procedure should be to improve on the performance of conventional methods for such problems or to achieve capabilities for new even more complex or difficult problems. This is, as specified, not necessary for proof-of-concept when presenting new solution frameworks, but this should be the ultimate goal for true scientific progress within the field.
6 Conclusion
6.1 Current status for AI in TO
The recent surge in publications presenting research into exploiting AI-technology for TO is likely motivated by such technologies’ positive impact on the field of computer vision. With the desire to eliminate the need for iterative solution procedures in structural optimisation, a large number of neural network models have been suggested, clearly inspired by the success of using deep learning for image segmentation and generation tasks. These direct design models are however found to produce poor designs, be expensive to obtain and be very restricted in terms of the variety of problems and mesh resolutions they can handle. Their insufficient performance has, however, not reduced the popularity of the premise of iteration-free TO. It is true that conventional TO consists of a computationally expensive iteration process, but the iterative nature in itself is not what makes true large-scale TO impractical. Rather, it is the expense of the inter-iteration computations that pose the real challenge. Therefore, it is postulated that the idea of a direct iteration-free TO should be discarded and that the focus should shift towards alleviating the computational load of the costly components within the iterative process.
This literature review includes descriptions of several other application areas, relating to for instance acceleration of the optimisation procedure and post-processing of optimised results. These methods allow for designing models with more specific tasks that have a more realistic possibility of being handled by an approximative mathematical model. Designing viable models for these purposes is proven to be a challenge, as there is still a lack of convincing results presented in the literature. Few of the reviewed articles exhibit promise towards actual scientific progress, but the alternatives for such methods are not exhaustively researched, and greater potential is expected. Therefore, one should definitely not reject all prospects for utilising AI-technology to aid in TO.
What is important for overall success within this field, is to adopt a more critical perspective when it comes to evaluating ideas and results both pertaining to work done by oneself and others. Throughout this review it has become clear that there is a lack of understanding both related to model viability and interpretation of results. This is seen both by presenting ML-models with tasks they cannot realistically solve, and insufficient reporting of experimental results. Further, there is a trend of describing the output from research works in terms of what the aim was to achieve, instead of what was achieved. To ensure further progress, it is crucial to present ones research results with full transparency, and to accurately assess the work of others when citing literature.
The recommendations made in this review article are meant to instigate the above-mentioned needed changes. To summarise the important points of the analysis results, 6 questions to consider when working with AI in TO are presented. This list is inspired by the recommendations made by Marcus and Davis (2019) for assessing AI research results.
-
1.
Disregarding the theoretical expectations, what does the AI system actually achieve?
-
2.
How general is the approach? (E.g. can it capture all aspects of the problem, or just mimic the provided training data?)
-
3.
Is there a transparent and thorough presentation of performance? (E.g. is the worst case performance presented and is the computational gain fairly represented?)
-
4.
If it is claimed that an AI system outperforms its conventional counterpart, then on what aspects/measures, and how much better?
-
5.
How far does successfully solving the presented example instances take us toward achieving AI-based state-of-the-art solution methods?
-
6.
How robust is the system and what is its generalisation ability? Could it work equally well with other problem characteristics (boundary conditions, loads, etc.), without demanding re-training?
Addressing the above points should at least include listing of breakeven thresholds (1) and generalisation ability (Table 3) or equally transparent alternatives where these measures are not feasible. Further, a fair presentation of solution qualities and comparisons to the most relevant benchmarks, is also expected. Such a proper assessment of method capabilities should be a minimum requirement before publication.
Interestingly, it is observed that only 14 out of 111 ML-papers discussed in this review have appeared in the Struct Multidisc Optim (SMO) journal. A large majority of papers seems to appear in “non-optimisation”and physics journals, where readers and reviewers may have been less exposed to efficient topology optimisation approaches and, hence, more likely to accept the concept of learning-based methods for inverse design. Even if this review is published in SMO, the ambition and hope is that its message will spread to other journals and scientific societies, such that future research efforts are spent in meaningful ways.
6.2 Future promise
As mentioned, the most promising ideas for applications of AI in TO in the current literature, relates to acceleration of the iterative optimisation process or post-processing optimised results for manufacturability. An obvious approach that could offer substantial speed-up is to reduce the number of FEAs needed throughout the optimisation procedure. This could be obtained by either removing a part of the iterative process (Kallioras et al. 2020) or replacing the FEA for a polynomial process in a subset of the iterations (Chi et al. 2021; Sasaki and Igarashi 2019). Multi-scale approaches where ML-models are used to map analytical results on a coarse grid to approximate values on a fine grid do also seem viable, but the results should then be appropriately compared to other multi-grid methods.
Relating to this, the concept of physics-informed neural networks (PINNs), first introduced by Raissi et al. (2019), has lately gained increasing traction and is useful for learning tasks in the presence of physical laws that should be respected. By encoding structured information into the loss function of a neural network utilising the principles of PINNs, one could for instance obtain an approximate model describing the solution to a set of partial differential equations that would function as a substitute for FEA. So far experimental results show that this approach requires fewer data samples to train a more generalised model. Due to a current lack of combinations with TO this is beyond the scope of this review, but it is believed that this could be an interesting path for further research in the field. This approach may allow for both more efficient and accurate approximations of the governing equations in a topology optimisation problem, as well as modelling of more complex and highly nonlinear mechanical properties. However, optimisation is known to optimise numerical errors before physics (cf. the checkerboard problem), and therefore caution should be taken when working with potentially inaccurate numerical physics descriptions.
Post-processing of TO-optimised structures utilising ML-methodology is currently an underrepresented application area in the literature that may deserve more attention in the future. Especially, converting the TO-optimised structure representation to a format suited for different manufacturing techniques may have a positive effect on the possibilities for applying TO in real-life product design processes. Also, as shown in Elingaard et al. (2022), ML has promise for efficient de-homogenisation which strengthens the capabilities of the more efficient homogenisation-based TO method. As such, one can achieve more efficient optimisation procedures also without changing the main optimisation process itself.
Further, the structural representation, typically in the form of discretised FE-grids, is a main reason for both the computational time and memory requirements associated with large-scale TO. Therefore, significant improvements could be achieved by appropriate re-parameterisations of the TO-models, where the problem size is reduced in terms of number of design variables or the information needed to sufficiently represent a structure. This is, however, only true provided that FEA is also removed from the usual mesh. As there exists several ML-methods that have proven to be good for feature extraction through down-sampling, this could be another interesting research avenue, related to the PINNs. Note that any such new method should be compared to current state-of-the-art model order reduction methods and not to full scale standard TO.
Overall, the research into using AI-technology in TO has barely begun. This review has mainly focused on the use of ANNs, but it is believed that many crucial arguments readily translate to other types of ML-models. A select group of applications have so far shown promising results for future development, but most works exhibit unrealistic expectations for what such models can learn. To further advance the use of AI in TO, there is therefore a need for greater knowledge and understanding of existing AI capabilities amongst researchers applying such technology. As new technology continues to emerge, some of the recommendations in this paper may change, but the proposed considerations for how to evaluate new frameworks will most probably not.
Notes
Sigmund and Maute (2013) included a few lines of Matlab code to perform a volume-preserving threshold.
References
Abueidda DW, Almasri M, Ammourah R, Ravaioli U, Jasiuk IM, Sobh NA (2019) Prediction and optimization of mechanical properties of composites using convolutional neural networks. Compos Struct 227(111):264. https://doi.org/10.1016/j.compstruct.2019.111264https://linkinghub.elsevier.com/retrieve/pii/S0263822319312383
Abueidda DW, Koric S, Sobh NA (2020) Topology optimization of 2D structures with nonlinearities using deep learning. Comput Struct 237(106):283. https://doi.org/10.1016/j.compstruc.2020.106283https://linkinghub.elsevier.com/retrieve/pii/S0045794920300869
Adeli H, Park HS (1995) A neural dynamics model for structural optimization-Theory. Comput Struct 57(3):383–390. https://doi.org/10.1016/0045-7949(95)00048-Lhttps://linkinghub.elsevier.com/retrieve/pii/004579499500048L
Adeli H, Park HS (1995) Optimization of space structures by neural dynamics. Neural Networks 8(5):769–781. https://doi.org/10.1016/0893-6080(95)00026-Vhttps://linkinghub.elsevier.com/retrieve/pii/089360809500026V
Allaire G, Jouve F, Toader AM (2002) A level-set method for shape optimization. Comptes Rendus Mathematique 334(12):1125–1130. https://doi.org/10.1016/S1631-073X(02)02412-3https://linkinghub.elsevier.com/retrieve/pii/S1631073X02024123
Amir O, Sigmund O (2011) On reducing computational effort in topology optimization: how far can we go? Struct Multidisc Optim 44(1):25–29. https://doi.org/10.1007/s00158-010-0586-7
Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O (2011) Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidisc Optim 43(1):1–16. https://doi.org/10.1007/s00158-010-0594-7
Ates GC, Gorguluarslan RM (2021) Two-stage convolutional encoder-decoder network to improve the performance and reliability of deep learning models for topology optimization. Struct Multidisc Optim 63(4):1927–1950. https://doi.org/10.1007/s00158-020-02788-w
Aulig N, Olhofer M (2013) Evolutionary generation of neural network update signals for the topology optimization of structures. In: Proceedings of the 15th annual conference companion on Genetic and evolutionary computation. ACM, New York, NY, USA, pp 213–214, https://doi.org/10.1145/2464576.2464685,
Aulig N, Olhofer M (2015) Applications of Evolutionary Computation, Lecture Notes in Computer Science, vol 9028. SpringerCham,. https://doi.org/10.1007/978-3-319-16549-3
Baandrup M, Sigmund O, Polk H, Aage N (2020) Closing the gap towards super-long suspension bridges using computational morphogenesis. Nat Commun 11(1):2735. https://doi.org/10.1038/s41467-020-16599-6
Banga S, Gehani H, Bhilare S, Patel S, Kara L (2018) 3D Topology Optimization using Convolutional Neural Networks. Preprint http://arxiv.org/abs/1808.07440
Barmada S, Fontana N, Formisano A, Thomopulos D, Tucci M (2021) A deep larning surrogate model for topology optimization. IEEE Trans Magn 57(6):1–4. https://doi.org/10.1109/TMAG.2021.3063470https://ieeexplore.ieee.org/document/9367238/
Behzadi MM, Ilies HT (2021) GANTL: Towards Practical and Real-Time Topology Optimization with Conditional GANs and Transfer Learning. J Mech Des pp 1–32. https://doi.org/10.1115/1.4052757, https://asmedigitalcollection.asme.org/mechanicaldesign/article/doi/10.1115/1.4052757/1121902/GANTL-Towards-Practical-and-Real-Time-Topology
Behzadi MM, Ilieş HT (2021) Real-time topology otimization in 3D via deep transfer learning. Comput-Aid Des 135(103):014. https://doi.org/10.1016/j.cad.2021.103014https://linkinghub.elsevier.com/retrieve/pii/S0010448521000257
Bendsøe MP (1989) Optimal shape design as a material distribution problem. Struct Optim 1(4):193–202. https://doi.org/10.1007/BF01650949https://springerlink.bibliotecabuap.elogim.com/10.1007/BF01650949
Bendsøe MP, Kikuchi N (1988) Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Eng 71(2):197–224. https://doi.org/10.1016/0045-7825(88)90086-2https://linkinghub.elsevier.com/retrieve/pii/0045782588900862
Bielecki D, Patel D, Rai R, Dargush GF (2021) Multi-stage deep neural network accelerated topology optimization. Struct Multidisc Optim 64(6):3473–3487. https://doi.org/10.1007/s00158-021-03028-5
Bonfanti S, Guerra R, Font-Clos F, Rayneau-Kirkhope D, Zapperi S (2020) Automatic design of mechanical metamaterial actuators. Nat Commun 11(1):4162. https://doi.org/10.1038/s41467-020-17947-2
Buonamici F, Carfagni M, Furferi R, Governi L, Lapini A, Volpe Y (2018) Reverse engineering modeling methods and tools: a survey. Comput Aid Des Appl 15(3):443–464. https://doi.org/10.1080/16864360.2017.1397894
Cang R, Yao H, Ren Y (2019) One-shot generation of near-optimal topology through theory-driven machine learning. Computr-Aid Des 109:12–21. https://doi.org/10.1016/j.cad.2018.12.008https://linkinghub.elsevier.com/retrieve/pii/S0010448518303828
Chan YC, Da D, Wang L, Chen W (2021) Remixing Functionally Graded Structures: Data-Driven Topology Optimization with Multiclass Shape Blending. Preprint arXiv:2112.00648
Chandrasekhar A, Suresh K (2021a) Length Scale Control in Topology Optimization using Fourier Enhanced Neural Networks. Preprint arXiv:2109.01861
Chandrasekhar A, Suresh K (2021) Multi-Material Topology Optimization Using Neural Networks. Comput-Aid Des 136(103):017. https://doi.org/10.1016/j.cad.2021.103017https://linkinghub.elsevier.com/retrieve/pii/S0010448521000282
Chandrasekhar A, Suresh K (2021) TOuNN: Topology Optimization using Neural Networks. Struct Multidisc Optim 63(3):1135–1149. https://doi.org/10.1007/s00158-020-02748-4
Chen C, Gu GX (2020) Generative Deep Neural Networks for Inverse Materials Design Using Backpropagation and Active Learning. Advanced Science 7(5):1902,607. https://doi.org/10.1002/advs.201902607
Chen L, Shen MHH (2021) A New Topology Optimization Approach by Physics-Informed Deep Learning Process. Advances in Science, Technology and Engineering Systems Journal 6(4):233–240. https://doi.org/10.25046/aj060427, https://astesj.com/v06/i04/p27/
Chi H, Zhang Y, Tang TLE, Mirabella L, Dalloro L, Song L, Paulino GH (2021) Universal machine learning for topology optimization. Comput Methods Appl Mech Eng 375(112):739. https://doi.org/10.1016/j.cma.2019.112739https://linkinghub.elsevier.com/retrieve/pii/S0045782519306292
Copeland M (2016) What’s the Difference Between Artificial Intelligence, Machine Learning and Deep Learning? https://blogs.nvidia.com/blog/2016/07/29/whats-difference-artificial-intelligence-machine-learning-deep-learning-ai/
Da D, Chan YC, Wang L, Chen W (2022) Data-driven and topological design of structural metamaterials for fracture resistance. Extreme Mechanics Letters 50(101):528. https://doi.org/10.1016/j.eml.2021.101528https://linkinghub.elsevier.com/retrieve/pii/S2352431621002078
Deng H, To AC (2020) Topology optimization based on deep representation learning (DRL) for compliance and stress-constrained design. Computational Mechanics 66(2):449–469. https://doi.org/10.1007/s00466-020-01859-5
Deng H, To AC (2021) A Parametric Level Set Method for Topology Optimization based on Deep Neural Network (DNN). Preprint arXiv:2101.03286
Dinh L, Sohl-Dickstein J, Bengio S (2016) Density estimation using Real NVP
Du T, Inala JP, Pu Y, Spielberg A, Schulz A, Rus D, Solar-Lezama A, Matusik W (2018) InverseCSG. ACM Trans Graph 37(6):1–16. https://doi.org/10.1145/3272127.3275006
Eck M, Hoppe H (1996) Automatic reconstruction of B-spline surfaces of arbitrary topological type. In: Proceedings of the 23rd annual conference on Computer graphics and interactive techniques - SIGGRAPH ’96. ACM Press, New York, New York, USA, pp 325–334, https://doi.org/10.1145/237170.237271
Elingaard MO, Aage N, Bærentzen JA, Sigmund O (2022) De-homogenization using convolutional neural networks. Comput Methods Appl Mech Eng 388(114):197. https://doi.org/10.1016/j.cma.2021.114197https://linkinghub.elsevier.com/retrieve/pii/S0045782521005284
Garland AP, White BC, Jensen SC, Boyce BL (2021) Pragmatic generative optimization of novel structural lattice metamaterials with machine learning. Materials & Design 203(109):632. https://doi.org/10.1016/j.matdes.2021.109632https://linkinghub.elsevier.com/retrieve/pii/S0264127521001854
Garrelts E, Huber M, Roth D, Binz H (2021) AI-Based Topology Optimization of Freehand Sketches. Procedia CIRP 104:1316–1321. https://doi.org/10.1016/j.procir.2021.11.221https://linkinghub.elsevier.com/retrieve/pii/S2212827121011197
Goodfellow I, Bengio Y, Courville A (2016) Deep Learning. The MIT Press
Goodfellow I, McDaniel P, Papernot N (2018) Making machine learning robust against adversarial inputs. Communications of the ACM 61(7):56–66. https://doi.org/10.1145/3134599
Greminger M (2020) Generative Adversarial Networks With Synthetic Training Data for Enforcing Manufacturing Constraints on Topology Optimization. In: Volume 11A: 46th Design Automation Conference (DAC), Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, https://doi.org/10.1115/DETC2020-22399, https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2020/84003/Virtual
Groen JP, Sigmund O (2018) Homogenization-based topology optimization for high-resolution manufacturable microstructures. Int J for Numer Methods Eng 113(8):1148–1163. https://doi.org/10.1002/nme.5575
Groen JP, Langelaar M, Sigmund O, Ruess M (2017) Higher-order multi-resolution topology optimization using the finite cell method. Int J for Numer Methods Eng 110(10):903–920. https://doi.org/10.1002/nme.5432
Gu GX, Chen CT, Buehler MJ (2018) De novo composite design based on machine learning algorithm. Extreme Mechanics Letters 18:19–28. https://doi.org/10.1016/j.eml.2017.10.001https://linkinghub.elsevier.com/retrieve/pii/S2352431617301256
Guo K, Yang Z, Yu CH, Buehler MJ (2021) Artificial intelligence and machine learning in design of mechanical materials. Materials Horizons 8(4):1153–1172. https://doi.org/10.1039/D0MH01451Fhttps://xlink.rsc.org/?DOI=D0MH01451F
Guo T, Lohan DJ, Cang R, (2018) An Indirect Design Representation for Topology Optimization Using Variational Autoencoder and Style Transfer. In et al (2018) AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. American Institute of Aeronautics and Astronautics, Reston, Virginia,. https://doi.org/10.2514/6.2018-0804
Guo X, Zhang W, Zhong W (2014) Doing Topology Optimization Explicitly and Geometrically-A New Moving Morphable Components Based Framework. Journal of Applied Mechanics 81(8). https://doi.org/10.1115/1.4027609, https://asmedigitalcollection.asme.org/appliedmechanics/article/doi/10.1115/1.4027609/370419/Doing-Topology-Optimization-Explicitly-and
Halle A, Campanile LF, Hasse A (2021) An Artificial Intelligence-Assisted Design Method for Topology Optimization without Pre-Optimized Training Data. Applied Sciences 11(19):9041. https://doi.org/10.3390/app11199041
Harish B, Eswara Sai Kumar K, Srinivasan B (2020) Topology Optimization Using Convolutional Neural Network. In: Lecture Notes in Mechanical Engineering. Springer, p 301–307, https://doi.org/10.1007/978-981-15-5432-2_26,
Hayashi K, Ohsaki M (2020) Reinforcement Learning and Graph Embedding for Binary Truss Topology Optimization Under Stress and Displacement Constraints. Frontiers in Built Environment 6. https://doi:org/10:3389fbuil:2020:00059
Heaven D (2019) Why deep-learning AIs are so easy to fool. Nature 574(7777):163–166. https://doi.org/10.1038/d41586-019-03013-5
Herath S, Haputhanthri U (2021) Topologically optimal design and failure prediction using conditional generative adversarial networks. Int J for Numer Methods Eng 122(23):6867–6887. https://doi.org/10.1002/nme.6814
Hertlein N, Buskohl PR, Gillman A, Vemaganti K, Anand S (2021) Generative adversarial network for early-stage design flexibility in topology optimization for additive manufacturing. Journal of Manufacturing Systems 59:675–685. https://doi.org/10.1016/j.jmsy.2021.04.007https://linkinghub.elsevier.com/retrieve/pii/S027861252100087X
Hoang VN, Nguyen NL, Tran DQ, Vu Q-V, Nguyen-Xuan H (2022) Data-driven geometry-based topology optimization. Struct Multidisc Optim 65(2):69. https://doi.org/10.1007/s00158-022-03170-8
Hoyer S, Sohl-Dickstein J, Greydanus S (2019) Neural reparameterization improves structural optimization. Preprint arXiv:1909.04240
Jang S, Yoo S, Kang N (2022) Generative Design by Reinforcement Learning: Enhancing the Diversity of Topology Optimization Designs. Comput-Aid Des 146(103):225. https://doi.org/10.1016/j.cad.2022.103225https://linkinghub.elsevier.com/retrieve/pii/S0010448522000239
Janiesch C, Zschech P, Heinrich K (2021) Machine learning and deep learning. Electronic Markets 31(3):685–695. https://doi.org/10.1007/s12525-021-00475-2
Jiang J, Fan JA (2019) Global Optimization of Dielectric Metasurfaces Using a Physics-Driven Neural Network. Nano Letters 19(8):5366–5372. https://doi.org/10.1021/acs.nanolett.9b01857https://pubs.acs.org/doi/10.1021/acs.nanolett.9b01857
Jiang J, Chen M, Fan JA (2021) Deep neural networks for the evaluation and design of photonic devices. Nature Reviews Materials 6(8):679–700. https://doi.org/10.1038/s41578-020-00260-1www.nature.com/articles/s41578-020-00260-1
Jiang X, Wang H, Li Y, Mo K (2020) Machine Learning based parameter tuning strategy for MMC based topology optimization. Adv Eng Softw 149(102):841. https://doi.org/10.1016/j.advengsoft.2020.102841https://linkinghub.elsevier.com/retrieve/pii/S0965997820300363
Joo Y, Yu Y, Jang IG (2021) Unit Module-Based Convergence Acceleration for Topology Optimization Using the Spatiotemporal Deep Neural Network. IEEE Access 9:149,766–149,779. https://doi.org/10.1109/ACCESS.2021.3125014, https://ieeexplore.ieee.org/document/9599692/
Kallioras NA, Lagaros ND (2021) DL-SCALE: a novel deep learning-based model order upscaling scheme for solving topology optimization problems. Neural Computing and Applications 33(12):7125–7144. https://doi.org/10.1007/s00521-020-05480-8
Kallioras NA, Kazakis G, Lagaros ND (2020) Accelerated topology optimization by means of deep learning. Struct Multidisc Optim 62(3):1185–1212. https://doi.org/10.1007/s00158-020-02545-zhttps://springerlink.bibliotecabuap.elogim.com/10.1007/s00158-020-02545-z
Kallioras NA, Nordas AN, Lagaros ND (2021) Deep Learning-Based Accuracy Upgrade of Reduced Order Models in Topology Optimization. Applied Sciences 11(24):12,005. https://doi.org/10.3390/app112412005, https://www.mdpi.com/2076-3417/11/24/12005
Keshavarzi M, Bidgoli A, Kellner H (2020) V-Dream: Immersive Exploration of Generative Design Solution Space. Preprint arXiv:2006.11044
Keshavarzzadeh V, Alirezaei M, Tasdizen T, Kirby RM (2021) Image-Based Multiresolution Topology Optimization Using Deep Disjunctive Normal Shape Model. Comput-Aid Des 130(102):947. https://doi.org/10.1016/j.cad.2020.102947https://linkinghub.elsevier.com/retrieve/pii/S0010448520301408
Keshavarzzadeh V, Kirby RM, Narayan A (2021) Robust topology optimization with low rank approximation using artificial neural networks. Computational Mechanics 68(6):1297–1323. https://doi.org/10.1007/s00466-021-02069-3
Kim C, Lee J, Yoo J (2021) Machine learning-combined topology optimization for functionary graded composite structure design. Comput Methods Appl Mech Eng 387(114):158. https://doi.org/10.1016/j.cma.2021.114158https://linkinghub.elsevier.com/retrieve/pii/S0045782521004898
Kim Y, Kim Y, Yang C, Park K, Gu GX, Ryu S (2021b) Deep learning framework for material design space exploration using active transfer learning and data augmentation. npj Computational Materials 7(1):140. https://doi.org/10.1038/s41524-021-00609-2, https://www.nature.com/articles/s41524-021-00609-2
Kingma DP, Dhariwal P (2018) Glow: Generative Flow with Invertible 1x1 Convolutions
Kobyzev I, Prince SJ, Brubaker MA (2021) Normalizing Flows: An Introduction and Review of Current Methods. IEEE Transactions on Pattern Analysis and Machine Intelligence 43(11):3964–3979. https://doi.org/10.1109/TPAMI.2020.2992934
Kollmann HT, Abueidda DW, Koric S, Guleryuz E, Sobh NA (2020) Deep learning for topology optimization of 2D metamaterials. Materials & Design 196(109):098. https://doi.org/10.1016/j.matdes.2020.109098https://linkinghub.elsevier.com/retrieve/pii/S026412752030633X
Krizhevsky A, Sutskever I, Hinton GE (2017) ImageNet classification with deep convolutional neural networks. Communications of the ACM 60(6):84–90. https://doi.org/10.1145/3065386
Kurakin A, Goodfellow I, Bengio S (2016) Adversarial Machine Learning at Scale. Preprint arXiv:1611.01236
Langelaar M (2017) An additive manufacturing filter for topology optimization of print-ready designs. Struct Multidisc Optim 55(3):871–883. https://doi.org/10.1007/s00158-016-1522-2
Lazarov BS, Wang F, Sigmund O (2016) Length scale and manufacturability in density-based topology optimization. Archive of Applied Mechanics 86(1–2):189–218. https://doi.org/10.1007/s00419-015-1106-4
Lee H, Ge R, Ma T, Risteski A, Arora S (2017) On the ability of neural nets to express distributions
Lee S, Kim H, Lieu QX, Lee J (2020) CNN-based image recognition for topology optimization. Knowledge-Based Systems 198(105):887. https://doi.org/10.1016/j.knosys.2020.105887https://linkinghub.elsevier.com/retrieve/pii/S0950705120302379
Lei X, Liu C, Du Z, Zhang W, Guo X (2019) Machine Learning-Driven Real-Time Topology Optimization Under Moving Morphable Component-Based Framework. Journal of Applied Mechanics 86(1). https://doi.org/10.1115/1.4041319, https://asmedigitalcollection.asme.org/appliedmechanics/article/doi/10.1115/1.4041319/423490/Machine-LearningDriven-RealTime-Topology
Li B, Huang C, Li X, Zheng S, Hong J (2019) Non-iterative structural topology optimization using deep learning. Comput-Aid Des 115:172–180. https://doi.org/10.1016/j.cad.2019.05.038https://linkinghub.elsevier.com/retrieve/pii/S001044851930185X
Li M, Jia G, Cheng Z, Shi Z (2021) Generative adversarial network guided topology optimization of periodic structures via Subset Simulation. Compos Struct 260(113):254. https://doi.org/10.1016/j.compstruct.2020.113254https://linkinghub.elsevier.com/retrieve/pii/S0263822320331809
Li S, Kirby RM, Zhe S (2020) Deep Multi-Fidelity Active Learning of High-dimensional Outputs. Preprint arXiv:2012.00901
Li Y, Wu X, Chrysathou Y, Sharf A, Cohen-Or D, Mitra NJ (2011) GlobFit. ACM Trans Graph 30(4):1–12. https://doi.org/10.1145/2010324.1964947
Lin CY, Lin SH (2005) Artificial neural network based hole image interpretation techniques for integrated topology and shape optimization. Comput Methods Appl Mech Eng 194(36–38):3817–3837. https://doi.org/10.1016/j.cma.2004.09.005https://linkinghub.elsevier.com/retrieve/pii/S0045782504004657
Lin Q, Hong J, Liu Z, Li B, Wang J (2018) Investigation into the topology optimization for conductive heat transfer based on deep learning approach. Int Commun Heat Mass Transf= 97:103–109. https://doi.org/10.1016/j.icheatmasstransfer.2018.07.001https://linkinghub.elsevier.com/retrieve/pii/S0735193318301593
Luo J, Li Y, Zhou W, Gong Z, Zhang Z, Yao W (2021) An Improved Data-Driven Topology Optimization Method Using Feature Pyramid Networks with Physical Constraints. Comput Model Eng Sci 128(3):823–848. https://doi.org/10.32604/cmes.2021.016737, https://www.techscience.com/CMES/v128n3/44011
Luo Y, Xing J, Kang Z (2020) Topology optimization using material-field series expansion and Kriging-based algorithm: An effective non-gradient method. Comput Methods Appl Mech Eng 364(112):966. https://doi.org/10.1016/j.cma.2020.112966https://linkinghub.elsevier.com/retrieve/pii/S0045782520301493
Lynch ME, Sarkar S, Maute K (2019) Machine Learning to Aid Tuning of Numerical Parameters in Topology Optimization. J Mech Des 141(11). https://doi.org/10.1115/1.4044228, https://asmedigitalcollection.asme.org/mechanicaldesign/article/doi/10.1115/1.4044228/955325/Machine-Learning-to-Aid-Tuning-of-Numerical
Ma F, Zeng Z (2020) High-risk prediction localization: evaluating the reliability of black box models for topology optimization. Struct Multidisc Optim 62(6):3053–3069. https://doi.org/10.1007/s00158-020-02648-7
Marcus G, Davis E (2019) Rebooting AI: Building Artificial Intelligence We Can Trust. Pantheon Books, USA
Muñoz D, Nadal E, Albelda J, Chinesta F, R{\'{o}}denas JJ (2022) Allying topology and shape optimization through machine learning algorithms. Finite Elements Anal Des 204(103):719. https://doi.org/10.1016/j.finel.2021.103719
Nakamura K, Suzuki Y (2020) Deep learning-based topological optimization for representing a user-specified design area. Preprint arXiv:2004.05461
Napier N, Sriraman SA, Tran HT, James KA (2020) An Artificial Neural Network Approach for Generating High-Resolution Designs From Low-Resolution Input in Topology Optimization. J Mech Des 142(1). https://doi.org/10.1115/1.4044332, https://asmedigitalcollection.asme.org/mechanicaldesign/article/doi/10.1115/1.4044332/955332/An-Artificial-Neural-Network-Approach-for
Nguyen TH, Paulino GH, Song J, Le CH (2012) Improving multiresolution topology optimization via multiple discretizations. Int J Numer Methods Eng 92(6):507–530. https://doi.org/10.1002/nme.4344
Nie Z, Jiang H, Kara LB (2020a) Stress Field Prediction in Cantilevered Structures Using Convolutional Neural Networks. J Comput Inf Sci Eng 20(1). https://doi.org/10.1115/1.4044097, https://asmedigitalcollection.asme.org/computingengineering/article/doi/10.1115/1.4044097/955168/Stress-Field-Prediction-in-Cantilevered-Structures
Nie Z, Lin T, Jiang H, Kara LB (2020b) TopologyGAN: Topology Optimization Using Generative Adversarial Networks Based on Physical Fields Over the Initial Domain. Preprint arXiv:2003.04685
Norato J, Haber R, Tortorelli D, Bends{\o}e MP (2004) A geometry projection method for shape optimization. Int J Numer Methods Eng 60(14):2289–2312. https://doi.org/10.1002/nme.1044
Oh S, Jung Y, Kim S, Lee I, Kang N (2019) Deep Generative Design: Integration of Topology Optimization and Generative Models. J Mech Des 141(11). https://doi.org/10.1115/1.4044229, https://asmedigitalcollection.asme.org/mechanicaldesign/article/doi/10.1115/1.4044229/955342/Deep-Generative-Design-Integration-of-Topology
Olhofer M, Oñate E, Oliver J, Huerta A, Aulig N (2014) Topology optimization by predicting sensitivities based on local state features. Technical report, https://www.researchgate.net/publication/265593998
Pantz O, Trabelsi K (2008) A Post-Treatment of the Homogenization Method for Shape Optimization. SIAM J Control Optim 47(3):1380–1398. https://doi.org/10.1137/070688900
Papadrakakis M, Lagaros ND (2002) Reliability-based structural optimization using neural networks and Monte Carlo simulation. Comput Methods Appl Mech Eng 191(32):3491–3507. https://doi.org/10.1016/S0045-7825(02)00287-6https://linkinghub.elsevier.com/retrieve/pii/S0045782502002876
Papadrakakis M, Lagaros ND, Tsompanakis Y (1998) Structural optimization using evolution strategies and neural networks. Technical report
Park HS, Adeli H (1995) A neural dynamics model for structural optimization-application to plastic design of structures. Technical report p 3
Perry DJ, Keshavarzzadeh V, Elhabian SY, Kirby RM, Gleicher M, Whitaker RT (2020) Visualization of topology optimization designs with representative subset selection. Preprint arXiv:2012.14901
Pumarola A, Popov S, Moreno-Noguer F, Ferrari V (2020) C-Flow: Conditional Generative Flow Models for Images and 3D Point Clouds. In: 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, pp 7946–7955, https://doi.org/10.1109/CVPR42600.2020.00797
Qian C, Ye W (2021) Accelerating gradient-based topology optimization design with dual-model artificial neural networks. Struct Multidisc Optim 63(4):1687–1707. https://doi.org/10.1007/s00158-020-02770-6
Qiu C, Du S, Yang J (2021) A deep learning approach for efficient topology optimization based on the element removal strategy. Mater Des 212(110):179. https://doi.org/10.1016/j.matdes.2021.110179https://linkinghub.elsevier.com/retrieve/pii/S0264127521007346
Rade J, Balu A, Herron E, Pathak J, Ranade R, Sarkar S, Krishnamurthy A (2021) Algorithmically-consistent deep learning frameworks for structural topology optimization. Eng Appl Artif Intell 106(104):483. https://doi.org/10.1016/j.engappai.2021.104483https://linkinghub.elsevier.com/retrieve/pii/S0952197621003316
Raissi M, Perdikaris P, Karniadakis G (2019) Physics-informed neural networks: a deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J Comput Phys 378:686–707. https://doi.org/10.1016/j.jcp.2018.10.045https://linkinghub.elsevier.com/retrieve/pii/S0021999118307125
Rawat S, Shen MH (2019a) Application of Adversarial Networks for 3D Structural Topology Optimization. In: SAE Technical Papers, vol 2019-April. SAE International, https://doi.org/10.4271/2019-01-0829, https://www.sae.org/content/2019-01-0829/
Rawat S, Shen MHH (2018) A novel topology design approach using an integrated deep learning network architecture. Preprint arXiv:1808.02334
Rawat S, Shen MHH (2019b) A Novel Topology Optimization Approach using Conditional Deep Learning. Preprint arXiv.org/abs/1901.04859
Sasaki H, Igarashi H (2019) Topology Optimization Accelerated by Deep Learning. IEEE Trans Magn 55(6):1–5. https://doi.org/10.1109/TMAG.2019.2901906https://ieeexplore.ieee.org/document/8673771/
Sato Y, Izui K, Yamada T, Nishiwaki S (2019) Data mining based on clustering and association rule analysis for knowledge discovery in multiobjective topology optimization. Expert Syst Appl 119:247–261. https://doi.org/10.1016/j.eswa.2018.10.047https://linkinghub.elsevier.com/retrieve/pii/S095741741830705X
Shen MHH, Chen L (2019) A New CGAN Technique for Constrained Topology Design Optimization. Preprint arXiv.org/abs/1901.07675
Sigmund O (1994) Design of Material Structures Using Topology Optimization. PhD thesis, Technical University of Denmark, Kongens Lyngby, Denmark, https://www.researchgate.net/publication/261173987_Design_of_Material_Structures_Using_Topology_Optimization
Sigmund O (2011) On the usefulness of non-gradient approaches in topology optimization. Struct Multidisc Optim 43(5):589–596. https://doi.org/10.1007/s00158-011-0638-7
Sigmund O, Maute K (2013) Topology optimization approaches. Struct Multidisc Optim 48(6):1031–1055. https://doi.org/10.1007/s00158-013-0978-6
Sosnovik I, Oseledets I (2017) Neural networks for topology optimization. Preprint arXiv:1709.09578
Sui F, Guo R, Zhang Z, Gu GX, Lin L (2021) Deep reinforcement learning for digital materials design. ACS Mater Lett 3(10):1433–1439. https://doi.org/10.1021/acsmaterialslett.1c00390
Sun H, Ma L (2020) Generative design by using exploration approaches of reinforcement learning in density-based structural topology optimization. Designs 4(2):10. https://doi.org/10.3390/designs4020010 (www.mdpi.com/2411-9660/4/2/10)
Svanberg K (1987) The method of moving asymptotes-a new method for structural optimization. Int J Numer Methods Eng 24(2):359–373. https://doi.org/10.1002/nme.1620240207
Tiwari T, Tiwari T, Tiwari S (2018) How Artificial Intelligence, Machine Learning and Deep Learning are Radically Different? Technical report 2, www.ijarcsse.com
Träff E, Sigmund O, Groen JP (2019) Simple single-scale microstructures based on optimal rank-3 laminates. Struct Multidisc Optim 59(4):1021–1031. https://doi.org/10.1007/s00158-018-2180-3
Ulu E, Zhang R, Kara LB (2016) A data-driven investigation and estimation of optimal topologies under variable loading configurations. Comput Methods Biomech Biomed Eng 4(2):61–72. https://doi.org/10.1080/21681163.2015.1030775
Vulimiri PS, Deng H, Dugast F, Zhang X, Albert C (2021) Integrating Geometric Data into Topology Optimization via Neural Style Transfer. Materials 14(16):4551. https://doi.org/10.3390/ma14164551www.mdpi.com/1996-1944/14/16/4551
Wang C, Yao S, Wang Z, Hu J (2021) Deep super-resolution neural network for structural topology optimization. Eng Optim 53(12):2108–2121. https://doi.org/10.1080/0305215X.2020.1846031
Wang C, Zhao Z, Zhou M, Sigmund O, Zhang XS (2021) A comprehensive review of educational articles on Struct Multidisc Optim. Struct Multidisc Optim 64(5):2827–2880. https://doi.org/10.1007/s00158-021-03050-7
Wang D, Xiang C, Pan Y, Chen A, Zhou X, Zhang Y (2021c) A deep convolutional neural network for topology optimization with perceptible generalization ability. Eng Optim. pp 1–16. https://doi.org/10.1080/0305215X.2021.1902998
Wang F, Lazarov BS, Sigmund O (2011) On projection methods, convergence and robust formulations in topology optimization. Struct Multidisc Optim 43(6):767–784. https://doi.org/10.1007/s00158-010-0602-y
Wang L, Chan YC, Ahmed F, Liu Z, Zhu P, Chen W (2020) Deep generative modeling for mechanistic-based learning and design of metamaterial systems. Comput Methods Appl Mech Eng 372(113):377. https://doi.org/10.1016/j.cma.2020.113377https://linkinghub.elsevier.com/retrieve/pii/S0045782520305624
Wang L, Liu Z, Da D, Chan Y-C, Chen W, Zhu P (2021d) Enhancing Data-driven Multiscale Topology Optimization with Generalized De-homogenization. Preprint arXiv:2112.02506
Wang L, van Beek A, Da D, Chan Y-C, Zhu P, Chen W (2022) Data-driven multiscale design of cellular composites with multiclass microstructures for natural frequency maximization. Compos Struct 280(114):949. https://doi.org/10.1016/j.compstruct.2021.114949https://linkinghub.elsevier.com/retrieve/pii/S0263822321013805
Wang MY, Wang X, Guo D (2003) A level set method for structural topology optimization. Comput Methods Appl Mech Eng 192(1–2):227–246. https://doi.org/10.1016/S0045-7825(02)00559-5https://linkinghub.elsevier.com/retrieve/pii/S0045782502005595
Wein F, Dunning PD, Norato JA (2020) A review on feature-mapping methods for structural optimization. Struct Multidisc Optim 62(4):1597–1638. https://doi.org/10.1007/s00158-020-02649-6
White DA, Arrighi WJ, Kudo J, Watts SE (2019) Multiscale topology optimization using neural network surrogate models. Comput Methods Appl Mech Eng 346:1118–1135. https://doi.org/10.1016/j.cma.2018.09.007https://linkinghub.elsevier.com/retrieve/pii/S004578251830450X
Wu J, Aage N, Westermann R, Sigmund O (2018) Infill optimization for additive manufacturing-approaching bone-like porous structures. IEEE Trans Visualiz Comput Graph 24(2):1127–1140. https://doi.org/10.1109/TVCG.2017.2655523
Wu J, Sigmund O, Groen JP (2021) Topology optimization of multi-scale structures: a review. Struct Multidisc Optim 63(3):1455–1480. https://doi.org/10.1007/s00158-021-02881-8
Xie YM, Steven GP (1997) Evolutionary structural optimization. Springer, London,. https://doi.org/10.1007/978-1-4471-0985-3
Xue L, Liu J, Wen G, Wang H (2021) Efficient, high-resolution topology optimization method based on convolutional neural networks. Front Mech Eng 16(1):80–96. https://doi.org/10.1007/s11465-020-0614-2
Yamasaki S, Yaji K, Fujita K (2021) Data-driven topology design using a deep generative model. Struct Multidisc Optim 64(3):1401–1420. https://doi.org/10.1007/s00158-021-02926-y
Yan J, Zhang Q, Xu Q, Fan Z, Li H, Sun W, Wang G (2022) Deep learning driven real time topology optimisation based on initial stress learning. Adv Eng Inform 51(101):472. https://doi.org/10.1016/j.aei.2021.101472https://linkinghub.elsevier.com/retrieve/pii/S1474034621002226
Yang G, Huang X, Hao Z, Liu M-Y, Belongie S, Hariharan B (2019) PointFlow: 3D Point Cloud Generation with Continuous Normalizing Flows
Ye HL, Li JC, Yuan BS, Wei N, Sui Y-K (2021) Acceleration Design for Continuum Topology Optimization by Using Pix2pix Neural Network. Int J Appl Mech 13(04):2150,042. https://doi.org/10.1142/S1758825121500423
Yildiz A, Öztürk N, Kaya N, {\"{O}}zt{\"{u}}rk F (2003) Integrated optimal topology design and shape optimization using neural networks. Struct Multidisc Optim 25(4):251–260. https://doi.org/10.1007/s00158-003-0300-0
Yilin G, Fuh Ying Hsi J, Wen Feng L (2021) Multiscale topology optimisation with nonparametric microstructures using three-dimensional convolutional neural network (3D-CNN) models. Virtual Phys Prototyp 16(3):306–317. https://doi.org/10.1080/17452759.2021.1913783
Yim NH, Lee J, Kim J, Kim YY (2021) Big data approach for the simultaneous determination of the topology and end-effector location of a planar linkage mechanism. Mech Mach Theory 163(104):375. https://doi.org/10.1016/j.mechmachtheory.2021.104375https://linkinghub.elsevier.com/retrieve/pii/S0094114X21001336
Yoo S, Lee S, Kim S, Hwang KH, Park JH, Kang N (2021) Integrating deep learning into CAD/CAE system: generative design and evaluation of 3D conceptual wheel. Struct Multidisc Optim 64(4):2725–2747. https://doi.org/10.1007/s00158-021-02953-9
Yu Y, Hur T, Jung J, Jang IG (2019) Deep learning for determining a near-optimal topological design without any iteration. Struct Multidisc Optim 59(3):787–799. https://doi.org/10.1007/s00158-018-2101-5
Yue T, Yang H, Du Z, Liu C, Elkhodary KI, Tang S, Guo X (2021) A mechanistic-based data-driven approach to accelerate structural topology optimization through finite element convolutional neural network (FE-CNN). Preprint arXiv:2106.13652
Zehnder J, Li Y, Coros S, Thomaszewski B (2021) NTopo: Mesh-free Topology Optimization using Implicit Neural Representations. Preprint arXiv:2102.10782
Zhang Y, Chi H, Chen B, Tang TLE, Mirabella L, Song L, Paulino GH (2021a) Speeding up Computational Morphogenesis with Online Neural Synthetic Gradients. Preprint arXiv:2104.12282
Zhang Z, Li Y, Zhou W, Chen X, Yao W, Zhao Y (2021) TONR: An exploration for a novel way combining neural network with topology optimization. Comput Methods Appl Mech Eng 386(114):083. https://doi.org/10.1016/j.cma.2021.114083https://linkinghub.elsevier.com/retrieve/pii/S004578252100414X
Zheng L, Kumar S, Kochmann DM (2021) Data-driven topology optimization of spinodoid metamaterials with seamlessly tunable anisotropy. Comput Methods Appl Mech Eng 383(113):894. https://doi.org/10.1016/j.cma.2021.113894https://linkinghub.elsevier.com/retrieve/pii/S0045782521002310
Zheng S, Fan H, Zhang Z, Tian Z, Jia K (2021) Accurate and real-time structural topology prediction driven by deep learning under moving morphable component-based framework. Appl Math Model 97:522–535. https://doi.org/10.1016/j.apm.2021.04.009https://linkinghub.elsevier.com/retrieve/pii/S0307904X21002092
Zheng S, He Z, Liu H (2021) Generating three-dimensional structural topologies via a U-Net convolutional neural network. Thin-Walled Struct 159(107):263. https://doi.org/10.1016/j.tws.2020.107263https://linkinghub.elsevier.com/retrieve/pii/S0263823120311319
Zhou M, Rozvany G (1991) The COC algorithm, Part II: Topological, geometrical and generalized shape optimization. Comput Methods Appl Mech Eng 89(1–3):309–336. https://doi.org/10.1016/0045-7825(91)90046-9https://linkinghub.elsevier.com/retrieve/pii/0045782591900469
Zhu S, Ohsaki M, Hayashi K, Guo X (2021) Machine-specified ground structures for topology optimization of binary trusses using graph embedding policy network. Adv Eng Softw 159(103):032. https://doi.org/10.1016/j.advengsoft.2021.103032https://linkinghub.elsevier.com/retrieve/pii/S0965997821000612
Funding
The authors acknowledge funding from the Villum Fonden through the Villum Investigator Project “InnoTop”.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that there is no conflict of interest.
Replication of results
The results presented in this review can be reproduced by the provided descriptions of the experiments and the corresponding referenced open-source codes.
Additional information
Responsible Editor: James K Guest
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A

Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Woldseth, R.V., Aage, N., Bærentzen, J.A. et al. On the use of artificial neural networks in topology optimisation. Struct Multidisc Optim 65, 294 (2022). https://doi.org/10.1007/s00158-022-03347-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-022-03347-1