
Abstract
This paper proposes a nonlocal formulation regarding the modeling of Antarctic Circumpolar Current by introducing flow functions to encode horizontal flow components without considering vertical motion. Using topological degree, zero exponent theory and fixed point technique, we show the existence of positive solutions to nonlocal boundary value problems with nonlinear vorticity.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Antarctic Circumpolar Current (ACC) plays an important role in the global climate and is the main means of water exchange among the Atlantic, Indian and Pacific oceans. A better understanding of ACC transport at the Last Glacial Maximum would allow a better assessment of ACC dynamics and past global climate change. ACC is not a single flow; it is composed of narrow jets about 40-50 km wide with typical velocity exceeding 1 m/s. ACC has remarkably consistent flow characteristics. ACC is a complex and rich structure formed by the combined action of very strong westerly winds and Coriolis forces. It carries about 140 million cubic meters of water per second, more than 100 times the amount of all the world’s rivers, and travels about 24,000 km. ACC is strongly constrained by the terrain at the bottom, so it can be observed as time changes [1,2,3,4,5,6,7,8,9,10].
The problem of the existence of solutions to nonlinear governing equations of geophysical fluid dynamics, initiated by Constantin and Johnson [11,12,13,14,15,16,17,18,19,20], is widely discussed and researched in this field. The mathematical ideas is that, from the inviscid fluid Euler equation and the equation of mass conservation, they introduced spherical pole projection without considering the azimuth change of horizontal velocity to transform spherical coordinate model into an equivalent plane elliptic boundary value problem. In addition, mathematical models of gyres flows with boundary conditions in the southern and northern hemispheres have been studied in [18, 21,22,23,24,25,26,27,28,29,30,31]. Recently, the existence of exact solutions to ACC for the case of varied density has also been discussed in [32, 33]. We try to solve this problem of ACC model with nonlocal boundary conditions which has not been discussed from the existing literature.
2 Preliminaries
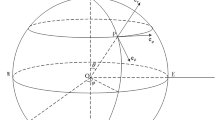
We adapt methods from [18] to bear relevance to our setting. By introducing the stream function \(\psi (\theta ,\varphi )\) in terms of the stereographic projection from the North Pole, the azimuthal and polar velocity components of ACC flows is given by

Azimuthal and polar angular spherical coordinates \(\varphi \) and \(\theta \) of a point P on the spherical surface of the Earth, with \(\theta =0\) and \(\theta =\pi \) correspond to the North and South Poles
where \(\theta \in [0,\pi )\) is polar angle with \(\theta =0\) corresponding to the North Pole and \(\varphi \in [0,2\pi )\) represents the angle of longitude in Fig. 1. In terms of the stream function \(\Psi \) is associated with the vorticity of the motion of the ocean, [18] defined
where \(\Psi \) is not driven by the Earth’s rotation. The governing equation of ACC flows can be expressed as
where \(F(\Psi -\omega \cos \theta )\) represents the form of the ocean flow of the ocean vortex and defines the property of the ocean vorticity function. \(\omega \) in \(F(\Psi -\omega \cos \theta )\) is the dimensionless Coriolis parameter and \(2\omega \cos \theta \) represents the planetary vorticity. The basic source of ocean vorticity is the gravitational attraction generated by the wind and the relative motion of the Moon, Sun and Earth in the form of tidal currents. Ebb and flow refers to the horizontal unidirectional movement of water, while tide refers to the vertical movement of water. The vorticity of water flows, the interaction of geophysical wave flows and the oceanic vorticity of these wind-driven flows can be regarded as a fixed nonzero constant in [17, 34].

Stereographic projection of the unit sphere (center at origin) from the North Pole to the equatorial plane, the point P in the Antarctic region, the straight line connecting it to the North Pole intersects the equatorial plane in a point \(P'\) belonging to the interior of the circular region delimited by the Equator. The ACC is mapped into a annular region within the equatorial plane
The stereographic projection is used from the North Pole to the equatorial plane on a unit sphere centered at the origin in Fig. 2. The model (2) in spherical coordinates can be transformed into an equivalent semilinear elliptic partial differential equation [18]. Set
where \((r,\phi )\) represents the polar coordinates on the equatorial plane and r is a function of \(\theta \). After several cancellations by using (3), equation (2) is simplified as
By seeking partial derivatives in (1), we have
According to Cartesian coordinates (x, y), equation (6) is equivalent to a semilinear elliptic partial differential equation
where \(\Delta =\partial _{x}^{2}+\partial _{y}^{2}\) is the Laplace operator, expressed by the Cartesian coordinates on the equatorial plane, and the unknown function \(\psi (x,y)\) represents the stream function. The circulation on the surface of the ocean is bounded by the horizontal set of flow functions, while in spherical projection coordinates, the solution of the circulation model (7) in the plane region is determined by these horizontal sets. The ACC flows are completely around the Earth [19, 35, 36] in the spherical region between the 56th and 60th latitude south, where there are only oceans and no land [21, 22]. This region is mapped to the circular region of the equatorial plane by the stereographic projection, while the plane projection maps the latitude circles of the southern hemisphere to concentric circles within the unit circle of the equatorial plane.
From
we obtain
therefore,
Thus, by substituting r and \(\Delta \psi \) into equation (7), we get
Noting ACC corresponding to the radial symmetric solution of problem (8) with no variations in the azimuthal direction, we introduce
where
with \(0<r_{-}<r_{+}<1\).
In terms of
and
(8) is equivalently turned into the second-order ordinary differential equation
with nonlocal boundary conditions
which means the fact that \(r=r_{\pm }\) for ACC as gyre flow are streamlines with \(\psi =u(t_{1})\) on \(r=r_{-}\) and \(\psi =u(t_{2})\) on \(r=r_{+}\).
In this paper, we assume that at the circulation boundary ACC flows behave as a streamline, which happens to be a linear combination of known streamlines \(u(\xi _{i})\), \(i=1,2,\cdot \cdot \cdot ,m-2\). This assumption is mathematically reasonable and feasible. Although many researchers have studied the boundary value problem of ACC flows and obtained some very good results, the existence of solutions to nonlocal boundary value problems regarding ACC flows has not been discussed. The ACC model is transformed into an equivalent operator equation by using the knowledge of nonlinear functional analysis. Using the techniques of topological degree theory, zero exponent theory and fixed point, under appropriate conditions, we discuss the existence of solutions to differential equations (9) with boundary conditions (10).
3 An equivalent operator equation for ACC model
In Sect. 2, we establish a new mathematical model of ACC with nonlocal boundary conditions, that is,
where \(a(\cdot ),b(\cdot ):[t_1,t_2]\rightarrow R\) are continuous, \(F(\cdot ,\cdot ):[t_1,t_2]\times R\rightarrow R\) is continuous,
and \(\xi _{i}\) \((i=1,2,\cdot \cdot \cdot ,m-2)\) satisfies \(t_{1}<\xi _{1}<\xi _{2}<\cdot \cdot \cdot<\xi _{m-2}<t_{2}\), \(\alpha _{i}\) and \(\beta _{i}\) satisfy \(\sum \limits _{i=1}^{m-2}\alpha _{i}=\sum \limits _{i=1}^{m-2}\beta _{i}=1\).
Definition 3.1
[37] Let X and Z be normed spaces. \(L:domL(\subset X)\rightarrow Z\) is a linear operator, if
-
(i)
ImL is the closed subspace of Z,
-
(ii)
\(dimKerL=codimImL<+\infty \),
then L is called Fredholm operator whose index is zero.
If L is Fredholm operator of index zero, then there are continuous operator \(P:X\rightarrow X\) and \(Q:Z\rightarrow Z\), such that
where the operator \(L|_{domL\cap KerP}:domL\cap KerP\rightarrow ImL\) is invertible. We use \(K_{P}\) to represent the inverse of \(L|_{domL\cap KerP}\) and \(K_{P,Q}=K_{P}(I-Q)\) to express \(K_{P,Q}:Z\rightarrow domL\cap KerP\), where I is a identity operator. For all \(J:ImQ\rightarrow KerL\), there is an isomorphic mapping \(JQ+K_{P,Q}:Z\rightarrow domL\) such that \((JQ+K_{P,Q})^{-1}u=(L+J^{-1}P)u\) for \(u\in domL\).
Definition 3.2
[37] Let X and Z be normed spaces, \(\Omega \subset X\) be open and bounded, \(L:domL(\subset X)\rightarrow Z\) is a Fredholm mapping. The operator \(N:\overline{\Omega }\rightarrow Z\) is called L-compact on \(\overline{\Omega }\) if \(QN:\overline{\Omega }\rightarrow Z\) and \(K_{P,Q}N:\overline{\Omega }\rightarrow X\) be compact on \(\overline{\Omega }\).
Let \(X=C^{2}[t_{1},t_{2}]\), \(Z=C[t_{1},t_{2}]\), and define
then domL is a Banach space with the norm
where \(\Vert u\Vert _{1}=\max \limits _{t\in [t_{1},t_{2}]}|u(t)|\). We also introduce the norm \(\Vert u\Vert _{2}=\int _{t_{1}}^{t_{2}}|u(t)|dt\) on Z. We put \(\Vert u\Vert =\max \{\Vert u\Vert _{1},\Vert u'\Vert _{1}\}\).
Let \(L:domL\rightarrow Z\) be given as
and \(N:X\rightarrow Z\) as
Then the nonlocal boundary value problem (11) is transformed into
Lemma 3.3
\(L:domL(\subset X)\rightarrow Z\) is a Fredholm operator of index zero.
Proof
Let \(u\in X\). Since
we have
There exists a \(u\in domL\subset X\) satisfying (10) such that \(u''(t)=g(t)\) for every \(g\in ImL\). By (13), we have
Noticing that \(\sum \limits _{i=1}^{m-2}\alpha _{i}=1\), we obtain
Since \(u(t_2)=\sum \limits _{i=1}^{m-2}\beta _{i}u(\xi _{i})\), we have
Combining (14) and (15), we have
therefore,
where
On the other hand, let \(g\in Z\) and
where C is an arbitrary constant, \(t\in [t_{1},t_{2}]\). Noting that \(u(t_1)=\sum \limits _{i=1}^{m-2}\alpha _{i}u(\xi _{i})\),
Next, (10) is equivalent to
which by using \(\sum \limits _{i=1}^{m-2}\beta _{i}=1\), gives (16). So (10) is obtained if (16) is true, that is, for \(\forall u\in domL\),
Now we define a linear continuous operator \(Q:Z\rightarrow Z\) by
where
Here, Q is a projection operator. In fact,
which implies Q is a projection operator, and \(ImL=KerQ\). For \(g\in Z\), since \(g-Qg\in KerQ=ImL\) and \(Qg\in ImQ\), we have \(Z=ImL+ImQ\). If \(g\in ImL\cap ImQ\), then \(g=0\); therefore, \(Z=ImL\oplus ImQ\). Because of the definition of domL, it is easy to verify
hence,
The proof is finished. \(\square \)
We define
where
Considering continuous linear operator \(P:X\rightarrow X\) defined by
or
we can define \(K_{P}:ImL\rightarrow domL\cap KerP\) by
then,
we obtain
where
Obviously, for every \(g\in ImL\), we have
for every \(u\in domL\cap KerP\), we have
where P is defined as (20). Since \(u\in KerP\), \(u(t_{1})=0\); hence,
Note that
for
Then
for
4 Existence results for positive solutions to ACC model
Set
We consider the following assumptions:
- (H1):
-
There exists a positive constant A such that for every \(u\in domL\backslash KerL\) with \(QNu=0\), there is a \(t_{0}\in [t_{1},t_{2}]\) satisfying \(|u(t_{0})|\le A\).
- (H2):
-
There exist continue functions \(p(\cdot ),q(\cdot ):[t_{1},t_{2}]\rightarrow R\) and \(p(\cdot )\) satisfying
$$\begin{aligned} \Vert p\Vert _{2}\le \frac{1-(t_{2}-t_{1})}{a^{*}(C_{2}+1)(t_{2}-t_{1})}, \end{aligned}$$such that
$$\begin{aligned} |F(t,u)|\le p(t)|u|+q(t), \end{aligned}$$where \(a^{*}=\max \limits _{[t_{1},t_{2}]}|a(t)|\), \(0<t_{2}-t_{1}<1\).
- (H3):
-
There exists a positive constant B such that for \(\forall ~|c|>B, c\in R\), it holds
$$\begin{aligned} cM(c)<0. \end{aligned}$$
Theorem 4.1
Assume that (H1), (H2) and (H3) hold. Then nonlocal boundary value problem (11) has at least one solution.
Proof
Consider
Then for each \(u\in \Omega _{1}\), we have \(u\notin KerL\), \(\lambda \ne 0\); hence, \(Nu\in ImL\). Since \(KerQ=ImL\), we have \(QNu=0\). We know from the condition (H1) that there exists a \(t_{0}\in [t_{1},t_{2}]\) satisfying \(|u(t_{0})|\le A\); then,
Since
we have
Using (24) and (25), we obtain
Considering that \((I-P)u\in ImK_{P}=domL\cap KerP\) for all \(u\in \Omega _{1}\), we have
Using (26), (27) and (20), we obtain
that is,
consequently, we have
and
Linking (28) and (29), we obtain
therefore, there exist positive number \(M_{u'}\) and \(M_{u}\), such that \(\Vert u'\Vert _{1}\le M_{u'}\) and \(\Vert u\Vert _{1}\le M_{u}\) for all \(u\in \Omega _{1}\), which shows that \(\Omega _{1}\) is bounded.
Let \(\Omega _{2}=\{u\in KerL|~Nu\in ImL\}\). For each \(u\in \Omega _{2}\), we have \(u=c\in R\) and \(Nu\in ImL=KerQ\), i.e.,
Thus, by (H3), we obtain \(\Vert u\Vert =\Vert c\Vert <B\), which implies that \(\Omega _{2}\) is bounded.
Define the mapping \(J:ImQ\rightarrow KerL\) by \(Jc=c\). Let
then \(u=c\in R\) for all \(u\in \Omega _{3}\), and we have
Using the condition (H3) and (30), we obtain \(\lambda c^{2}<0\), which is a contradiction. Thus, \(\Vert u\Vert =|c|\le B\), which shows that \(\Omega _{3}\) is bounded.
Let \(\Omega \) be an open and bounded set satisfying \(\overline{\Omega }_{1}\cup \overline{\Omega }_{2}\cup \overline{\Omega }_{3}\subseteq \Omega \), then we can obtain
Next, let us show that N is L-compact on \(\overline{\Omega }\).
We notice the fact that to prove that N is L-compact on \(\overline{\Omega }\) just need to prove that \(QN(\overline{\Omega })\) is bounded and \(K_{P,Q}N:\overline{\Omega }\rightarrow X\) is compact. In fact, we have
which shows that \(QN(\overline{\Omega })\) is bounded.
We now show that \(K_{P,Q}N(\overline{\Omega })\) is compact in X. In fact,
which implies that \(K_{P,Q}N(\overline{\Omega })\) is uniformly bounded in X.
For all \(t\in [t_{1},t_{2}]\), we have
Let \(\{u_n\}\) be an arbitrary sequence in \(\overline{\Omega }\) , then by using the mean value theorem, we obtain
Hence, by using the Arzela–Ascoli theorem (see [38]), we obain that \(K_{P,Q}N(\overline{\Omega })\) is compact, which shows that N is L-compact on \(\overline{\Omega }\).
Let \(H(u,\lambda )=\lambda Ju+(1-\lambda )JQNu\) for all \(u\in KerL\cap \partial \Omega \). Then by using the homotopy invariance of Leray–Schauder degree, we have
On the other hand, \(L:domL(\subset X)\rightarrow Z\) is Fredholm operator of index zero by Lemma 3.3; therefore, we have illuminated that all assumptions of [37, Theorem 1.5] are satisfied. As a result, the nonlocal boundary value problem (11) has at least one solution on \(\Omega \). The proof is complete. \(\square \)
Remark 4.2
Assume the existence of two continuous functions \(F_\pm (t)\in C[t_1,t_2]\) and positive constants \(\kappa \), \(r_0\) such that
for any \(t\in [t_1,t_2]\) and \(\pm u\ge r_0\) and
respectively. Then for any \(u\in C[t_1,t_2]\) with \(u(t)\ge r_0\), we derive
when
Thus,
Similarly, if
then
Consequently, (31), (32) and (33) imply (H1) and (H3) of Theorem 4.1 with \(A=B=r_0\).
Now we consider (11) with small nonlinearities of the form
where \(\epsilon \) is a small parameter. We show a simple but applicable result, giving also positive solutions, or multiple ones.
Theorem 4.3
If there are \(r_1<r_2\) such that \(M(r_1)M(r_2)<0\) for a function (23), then (34) has a solution \(r_1<u_\epsilon (t)<r_2\), \(t_{1}\le t\le t_{2}\) for any \(\epsilon \) small.
Proof
We apply Theorem IV.2 of [39]. The operator of (IV.12) of [39] is just (23). This finishes the proof. \(\square \)
So analyzing the graph of the scalar function (23) over R, we can study solvability of (34). When F(t, u) is \(C^1\)-smooth in u, then (23) uniquely analyzes solvability of (34). This means for instance that if M(r) does not change the sign over R, then (34) has no solution for \(\epsilon \ne 0\) small. Furthermore, the number of sign changes of M(r) over R is a lower number of possible solutions of (34) for \(\epsilon \ne 0\) small. To be more concrete, we consider that \(F(t,u)=F(u)\) in (9). Then (23) has the form
for
Consequently, if
and
then (34) has a solution for any \(\epsilon \) small. In particular, if F(r) is a polynomial of odd degree, then we get existence result. On other hand, if either
or
then (34) has no solutions for any \(\epsilon \) small.
Theorem 4.4
Assume that
-
(i)
\(\lim \limits _{u\rightarrow \infty }F(t,u)=F_+\) uniformly for all \(t\in [t_{1},t_{2}]\) and \(M_1F_++M_2<0\), where \(M_{1,2}\) are given by (35).
-
(ii)
There exists a \(\beta \in R\), such that
$$\begin{aligned} \frac{u}{t_{2}-t_{1}}+(\beta q(s)+H(t,s))(a(s)F(s,u))+b(s))\ge 0\quad \forall (t,s)\in [t_1,t_2]^2, \end{aligned}$$where q(s) and H(t, s) are given by (19) and (22), respectively.
Then the nonlocal boundary value problem (11) has at least one nonnegative solution.
Proof
We follow [40, Theorem 1]. We consider now \(X=Z=C[t_1,t_2]\) with the norm \(\Vert u\Vert _1\). Clearly it holds
where
So condition (i) of [40, Theorem 1] is verified for \(c_1=M_F+2\omega \) and \(c_2=0\). We take Pu(t) given by (21) and a cone
Next, we consider a continuous bilinear form on \(Z\times X\)
with a property that \(g\in Im L\) if and only if \(\langle g,u_0\rangle =0\) for every \(u_0\in Ker L\). Note
If \(u=u_0+u_1\in K\), where \(u_0=r\in Ker L\), \(r>\rho =(M_F+2\omega )\Vert K_{P,Q}\Vert \), \(u_1\in Ker P\) and \(\Vert u_1\Vert _1\le \rho \), then
and by (i)
uniformly for \(s\in [t_1,t_2]\). Thus, we obtain
Consequently by (i), we get \(\langle QN(u),u_0\rangle <0\) for a large \(r>0\). So condition (ii) of [40, Theorem 1] is also verified. Next, we consider a continuous retraction \(\gamma : X\rightarrow K\) given by
then a mapping \(J : Im Q\rightarrow Ker L\), \(Jz=\beta z\), and we derive
by (ii). So condition (iii) of [40, Theorem 1] is also verified. The proof is finished. \(\square \)
Similarly we have the next result.
Theorem 4.5
Assume that
-
(i)
\(\lim \limits _{u\rightarrow \pm \infty }F(t,u)=F_\pm \) uniformly for all \(t\in [t_{1},t_{2}]\) and \(\pm (M_1F_\pm +M_2)<0\), where \(M_{1,2}\) are given by (35).
Then the nonlocal boundary value problem (11) has at least one solution.
Proof
We follow the above proof with a trivial cone \(K=X\). Then \(\gamma (u)=u\) and (i), (ii) of [40, Theorem 1] are verified by (i) and condition (iii) of [40, Theorem 1] trivially holds. The proof is finished. \(\square \)
Remark 4.6
Conditions (i) of Theorems 4.4 and 4.5 are Landesman–Lazer type [39]. Condition (ii) of Theorem 4.5 holds, if
References
Danabasoglu, G., McWilliams, J.C., Gent, P.R.: The role of mesoscale tracer transport in the global ocean circulation. Science 264, 1123–1126 (1994)
Farneti, R., Delworth, T.L., Rosati, A., Griffies, S.M., Zeng, F.: The role of mesoscale eddies in the rectification of the Southern Ocean response to climate change. Journal of Physical Oceanography 40, 1539–1557 (2010)
Firing, Y.L., Chereskin, T.K., Mazloff, M.R.: Vertical structure and transport of the Antarctic Circumpolar Current in Drake Passage from direct velocity observations. J. Geophys. Res. Atmos. 116, C08015 (2011)
Ivchenko, V.O., Richards, K.J.: The dynamics of the Antarctic Circumpolar Current. J. Phys. Oceanogr. 26, 753–774 (2012)
Klinck, J., Nowlin, W.D.: Antarctic Circumpolar Current. Academic Press, Cambridge (2001)
Marshall, D.P., Munday, D.R., Allison, L.C., Hay, R.J., Johnson, H.L.: Gill’s model of the Antarctic Circumpolar Current, revisited: the role of latitudinal variations in wind stress. Ocean Model. 97, 37–51 (2016)
Tomczak, M., Godfrey, J.S.: Regional Oceanography: An Introdution. Pergamon Press, Oxford (1994)
Thompson, A.F.: The atmospheric ocean: eddies and jets in the Antarctic Circumpolar Current. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 366, 4529–4541 (2008)
White, W.B., Peterson, R.G.: An antarctic circumpolar wave in surface pressure, wind, temperature and sea-ice extent. Nature 380, 699–702 (1996)
Wolff, J.O.: Modelling the antarctic circumpolar current: eddy-dynamics and their parametrization. Environ. Model. Softw. 14, 317–326 (1999)
Constantin, A.: On the modelling of equatorial waves. Geophys. Res. Lett. 39, L05602 (2012)
Constantin, A.: An exact solution for equatorially trapped waves. J. Geophys. Res. Oceans 117, C05029 (2012)
Constantin, A.: Some three-dimensional nonlinear equatorial flows. J. Phys. Oceanogr. 43, 165–175 (2013)
Constantin, A.: Some nonlinear, equatorially trapped, nonhydrostatic internal geophysical waves. J. Phys. Oceanogr. 44, 781–789 (2014)
Constantin, A., Johnson, R.S.: The dynamics of waves interacting with the equatorial undercurrent. J. Geophys. Astrophys. Fluid Dyn. 109, 311–358 (2015)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal equatorial flow with a free surface. J. Phys. Oceanogr. 46, 1935–1945 (2016)
Constantin, A., Strauss, W., Varvaruca, E.: Global bifurcation of steady gravity water waves with critical layers. Acta Math. 217, 195–262 (2016)
Constantin, A., Johnson, R.S.: Large gyres as a shallow-water asymptotic solution of Euler’s equation in spherical coordinates. Proc.R. Soc. A Math. Phys. Eng. Sci. 473, 20170063 (2017)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal flow as a model for the Antarctic Circumpolar Current. J. Phys. Oceanogr. 46, 3585–3594 (2016)
Constantin, A., Johnson, R.S.: A nonlinear, three-dimensional model for ocean flows, motivated by some observations of the Pacific equatorial undercurrent and thermocline. Phys. Fluids 29, 056604 (2017)
Marynets, K.: A nonlinear two-point boundary-value problem in geophysics. Monatshefte für Mathematik 188, 287–295 (2019)
Marynets, K.: On a two-point boundary-value problem in geophysics. Appl. Anal. 98, 553–560 (2019)
Chu, J.: On a differential equation arising in geophysics. Monatshefte für Mathematik 187, 499–508 (2018)
Chu, J.: On a nonlinear model for arctic gyres. Annali di Matematica Pura ed Applicata 197, 651–659 (2018)
Chu, J.: Monotone solutions of a nonlinear differential equation for geophysical fluid flows. Nonlinear Anal. 166, 144–153 (2018)
Chu, J.: On an infinite-interval boundary-value problem in geophysics. Monatshefte für Mathematik 188, 621–628 (2019)
Marynets, K.: A weighted Sturm–Liouville problem related to ocean flows. J. Math. Fluid Mech. 20, 929–935 (2018)
Zhang, W.L., Wang, J., Fečkan, M.: Existence and uniqueness results for a second order differential equation for the ocean flow in arctic gyres. Monatshefte für Mathematik 193, 177–192 (2020)
Zhang, X.G., Jiang, J.Q., Wu, Y.H., Cui, Y.J.: Existence and asymptotic properties of solutions for a nonlinear Schrödinger elliptic equation from geophysical fluid flows. Appl. Math. Lett. 90, 229–237 (2019)
Zhang, W.L., Fečkan, M., Wang, J.: Positive solutions to integral boundary value problems from geophysical fluid flows. Monatshefte für Mathematik 193, 901–925 (2020)
Hsu, H.C., Martin, C.I.: On the existence of solutions and the pressure function related to the Antarctic circumpolar current. Nonlinear Anal. 155, 285–293 (2017)
Martin, C.I., Quirchmayr, R.: A steady stratified purely azimuthal flow representing the Antarctic Circumpolar Current. Monatshefte für Mathematik 192, 401–407 (2020)
Martin, C.I., Quirchmayr, R.: Explicit and exact solutions concerning the Antarctic Circumpolar Current with variable density in spherical coordinate. J. Math. Phys. 60, 101505 (2019)
Ewing, J.A.: Wind, wave and current data for the design of ships and offshore structures. Mar. Struct. 3, 421–459 (1990)
Martin, C.I.: On the existence of free-surface azimuthal equatorial flows. Appl. Anal. 96, 1207–1214 (2017)
Quirchmayr, R.: A steady, purely azimuthal flow model for the antarctic circumpolar current. Monatshefte für Mathematik 187, 565–572 (2018)
Kosmatov, N.: Multi-point boundary value problems on time scales at resonance. J. Math. Anal. Appl. 323, 253–266 (2006)
Zeidler, E.: Nonlinear Functional Analysis and Its Applications, I. Fixed-Point Theorems, Springer, New York, 1986 translated from the German by Peter R. Wadsack
Gaines, R.E., Mawhin, J.: Coincidence Degree, and Nonlinear Differential Equations, LNM 568. Spriner, Berlin (1977)
Santanilla, J.: Existence of nonnegative solutions of a semilinear equation at resonance with linear growth. Proc. Am. Math. Soc. 105, 963–971 (1989)
Acknowledgements
The authors are grateful to the referees for their careful reading of the manuscript and their valuable comments. We thank the editor also. There are no conflicts of interest to this work.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is partially supported by the National Natural Science Foundation of China (11661016), Training Object of High Level and Innovative Talents of Guizhou Province ((2016)4006), Major Research Project of Innovative Group in Guizhou Education Department ([2018]012), Guizhou Data Driven Modeling Learning and Optimization Innovation Team ([2020]5016), the Slovak Research and Development Agency under the contract No. APVV-18-0308, and the Slovak Grant Agency VEGA No. 1/0358/20 and No. 2/0127/20.
Rights and permissions
About this article

Cite this article
Wang, J., Fečkan, M. & Zhang, W. On the nonlocal boundary value problem of geophysical fluid flows. Z. Angew. Math. Phys. 72, 27 (2021). https://doi.org/10.1007/s00033-020-01452-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00033-020-01452-z