
Abstract
Among others, we prove that if a convex body \(\mathcal {K}\) and a ball \({\mathcal B}\) have equal constant volumes of caps and equal constant areas of sections with respect to the supporting planes of a sphere, then \({\mathcal K}\equiv {\mathcal B}\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
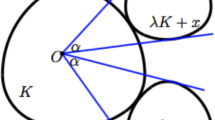
If the convex body \(\mathcal M\), the kernel, contains the origin \(O\), let \(\hbar _{\mathcal M}({\varvec{u}})\) denote the supporting hyperplane of \(\mathcal M\) that is perpendicular to the unit vector \({\varvec{u}}\in {\mathbb {S}}^{n-1}\) and contains in its same half space \(\hbar ^-_{\mathcal M}({\varvec{u}})\) the origin \(O\) and the kernel \(\mathcal M\). Its other half space is denoted by \(\hbar ^+_{\mathcal M}({\varvec{u}})\).
If the convex body \(\mathcal K\) contains the kernel \(\mathcal M\) in its interior, we define the functions
where \(|\cdot |\) is the appropriate Lebesgue measure.

The goal of this article is to investigate the problem of determining \(\mathcal K\) if some functions of the form (1.1) and (1.2) are given for a kernel \(\mathcal M\).
Two convex bodies \(\mathcal K\) and \(\mathcal K'\) are called \(\mathcal M\)-equicapped if \(\mathrm{C}^{}_{\mathcal M;\mathcal K}\equiv \mathrm{C}^{}_{\mathcal M;\mathcal K'}\), and they are \(\mathcal M\)-equisectioned if \(\mathrm{S}^{}_{\mathcal M;\mathcal K}\equiv \mathrm{S}^{}_{\mathcal M;\mathcal K'}\). A convex body \(\mathcal K\) is called \(\mathcal M\)-isocapped if \(\mathrm{C}^{}_{\mathcal M;\mathcal K}\) is constant. It is said to be \(\mathcal M\)-isosectioned if \(\mathrm{S}^{}_{\mathcal M;\mathcal K}\) is constant.
First we prove in the plane that
-
(a)
two convex bodies coincide if they are \(\mathcal M\)-equicapped and \(\mathcal M\)-equisectioned, no matter what \(\mathcal M\) is (Theorem 3.1), and
-
(b)
any disc-isocapped convex body is a disc concentric to the kernel (Theorem 3.2).Footnote 1
Then, in higher dimensions we consider only such convex bodies that are sphere-equisectioned and sphere-equicapped with a ball, and prove that
-
(1)
a convex body that is sphere-equicapped and sphere-equisectioned with a ball, is itself a ball (Theorem 5.3);
-
(2)
a convex body that is twice sphere-equicapped (for two different concentric spheres) with a ball is itself a ball (Theorem 5.1);
-
(3)
a convex body that is twice sphere-equisectioned (for two different concentric spheres) with a ball is itself a ball (Theorem 5.2, but dimension \(n=3\) excluded).
For more information about the subject we refer the reader to [1, 3] etc.
2 Preliminaries
We work with the \(n\)-dimensional real space \({\mathbb {R}}^n\), its unit ball is \(\mathcal B=\mathcal B^n\) (in the plane the unit disc is \(\mathcal D\)), its unit sphere is \({\mathbb {S}}^{n-1}\) and the set of its hyperplanes is \({\mathbb {H}}\). The ball (resp. disc) of radius \(\varrho >0\) centred to the origin is denoted by \(\varrho \mathcal B=\varrho \mathcal B^{n}\) (resp. \(\varrho \mathcal D\)).
Using the spherical coordinates \({\varvec{\xi }}=(\xi _1,\ldots ,\xi _{n-1})\) every unit vector can be written in the form \({\varvec{u}}_{{\varvec{\xi }}}=(\cos \xi _1,\sin \xi _1\cos \xi _2,\) \(\sin \xi _1\sin \xi _2\cos \xi _3,\ldots )\), the \(i\)th coordinate of which is \(u_{{\varvec{\xi }}}^i=(\prod _{j=1}^{i-1}\sin \xi _j)\cos \xi _i\) (\(\xi _n:=0\)). In the plane we even use the \({\varvec{u}}_{\xi }=(\cos \xi ,\sin \xi )\) and \({\varvec{u}}_{\xi }^{\perp }={\varvec{u}}_{\xi +\pi /2}=(-\sin \xi ,\cos \xi )\) notations and in analogy to this latter one, we introduce the notation \({\varvec{\xi }}^{\perp }=(\xi _1,\dots ,\xi _{n-2},\xi _{n-1}+\pi /2)\) for higher dimensions.
A hyperplane \(\hbar \in \mathbb {H}\) is parametrized so that \(\hbar ({\varvec{u}}_{{\varvec{\xi }}},r)\) means the one that is orthogonal to the unit vector \({\varvec{u}}_{{\varvec{\xi }}}\in {\mathbb {S}}^{n-1}\) and contains the point \(r{\varvec{u}}_{{\varvec{\xi }}}\), where \(r\in {\mathbb {R}}\).Footnote 2 For convenience we also frequently use \(\hbar (P,{\varvec{u}}_{{\varvec{\xi }}})\) to denote the hyperplane through the point \(P\in {\mathbb {R}}^n\) with normal vector \({\varvec{u}}_{{\varvec{\xi }}}\in {\mathbb {S}}^{n-1}\). For instance, \(\hbar (P,{\varvec{u}}_{{\varvec{\xi }}})=\hbar ({\varvec{u}}_{{\varvec{\xi }}},\langle \overrightarrow{OP},{\varvec{u}}_{{\varvec{\xi }}}\rangle )\), where \(O=\mathbf{0}\) is the origin and \(\langle .,.\rangle \) is the usual inner product.
On a convex body we mean a convex compact set \(\mathcal K\subseteq {\mathbb {R}}^n\) with non-empty interior \(\mathcal K^{\circ }\) and with piecewise \(\mathrm{C}^1\) boundary \(\partial \mathcal K\). For a convex body \(\mathcal K\) we let \(p_{\mathcal K}^{}:{\mathbb {S}}^{n-1}\rightarrow {\mathbb {R}}\) denote support function of \(\mathcal K\), which is defined by \(p_{\mathcal K}^{}({\varvec{u}}_{\xi })=\sup _{{\varvec{x}}\in \mathcal K}\langle {\varvec{u}}_{\xi },x\rangle \). We also use the notation \(\hbar _{\mathcal K}({\varvec{u}})=\hbar ({\varvec{u}},p_{\mathcal K}^{}({\varvec{u}}))\). If the origin is in \(\mathcal K^{\circ }\), another useful function of a convex body \(\mathcal K\) is its radial function \(\varrho _{\mathcal K}^{}:{\mathbb {S}}^{n-1}\rightarrow {\mathbb {R}}_+\) which is defined by \(\varrho _{\mathcal K}^{}({\varvec{u}})=|\{r{\varvec{u}}:r>0\}\cap \partial K|\).
We need the special functions \(I_x(a,b)\), the regularized incomplete beta function, \(B(x;a,b)\), the incomplete beta function, \(B(a,b)\), the beta function, and \(\Gamma (y)\), Euler’s Gamma function, where \(0<a,b\in {\mathbb {R}}, x\in [0,1]\) and \(y\in {\mathbb {R}}\). We introduce finally the notation \(|{\mathbb {S}}^{k}|:=2\pi ^{k/2}/\!\Gamma (k/2)\) as the standard surface measure of the \(k\)-dimensional sphere. For the special functions we refer the reader to [11, 12].
We shall frequently use the utility function \(\chi \) that takes relations as argument and gives \(1\) if its argument fulfilled. For example \(\chi (1>0)=1\), but \(\chi (1\le 0)=0\) and \(\chi (x>y)\) is \(1\) if \(x>y\) and it is zero if \(x\le y\). Nevertheless we still use \(\chi \) also as the indicator function of the set given in its subscript.
A strictly positive integrable function \(\omega :{\mathbb {R}}^n\!\setminus \!\mathcal B\rightarrow {\mathbb {R}}_+\) is called weight and the integral
of an integrable function \(f:{\mathbb {R}}^n\rightarrow {\mathbb {R}}\) is called the volume of \(f\) with respect to the weight \(\omega \) or simply the \(\omega \)-volume of \(f\). For the volume of the indicator function \(\chi _{\mathcal S}^{}\) of a set \(\mathcal S\subseteq {\mathbb {R}}^n\) we use the notation \(V_{\omega }(\mathcal S):=V_{\omega }(\chi _{\mathcal S})\) as a shorthand. If more weights are indexed by \(i\in {\mathbb {N}}\), then we use the even shorter notation \(V_{i}(\mathcal S):=V_{\omega _i}(\mathcal S)=V_{i}(\chi _{\mathcal S}^{}) :=V_{\omega _i}(\chi _{\mathcal S}^{})\).
3 In the plane
We heard the following easy result from Kincses [5].
Theorem 3.1
Assume that the border of the strictly convex plane bodies \(\mathcal M\) and \(\mathcal K\) are differentiable of class \(C^1\) and we are given \(\mathcal M\) and the functions \(\mathrm{S}_{\mathcal M;\mathcal K}^{}\) and \(\mathrm{C}_{\mathcal M;\mathcal K}^{}\). Then \(\mathcal K\) can be uniquely determined.
Proof
Fix the origin \(\mathbf{0}\) in \(\mathcal M^{\circ }\). In the plane \({\varvec{u}}_{\xi }=(\cos \xi ,\sin \xi )\), therefore we consider the functions
where \(\hbar ^+\) is the appropriate half space bordered by \(\hbar \).
Let \({\varvec{h}}(\xi )\) be the point, where \(\hbar (p^{}_{\mathcal M}(\xi ),{\varvec{u}}_{\xi })\) touches \(\mathcal M\). Then, as it is well known, \({\varvec{h}}(\xi )\!-\!p^{}_{\mathcal M}(\xi ){\varvec{u}}_{\xi }\!=\!p^{\prime }_{\mathcal M}(\xi ){\varvec{u}}_{\xi }^\perp \). Let \({\varvec{a}}(\xi )\) and \({\varvec{b}}(\xi )\) be the two intersections of \(\hbar (p^{}_{\mathcal M}(\xi ),{\varvec{u}}_{\xi })\) and \(\partial \mathcal K\) taken so that \({\varvec{a}}(\xi )={\varvec{h}}(\xi )+a(\xi ){\varvec{u}}_{\xi }^\perp \) and \({\varvec{b}}(\xi )={\varvec{h}}(\xi )-b(\xi ){\varvec{u}}_{\xi }^\perp \), where \(a(\xi )\) and \(b(\xi )\) are positive functions.
Then \(f(\xi )=a(\xi )+b(\xi )\).
In the other hand, we have
where \({\varvec{h}}(\xi )+\varrho ^{}_{\xi }(\zeta ){\varvec{u}}_{\zeta }\in \partial \mathcal K\). Since \(\frac{d\varrho ^{}_{\xi }(\zeta )}{d\xi }=\frac{d\varrho ^{}_{\xi }(\zeta )}{d\zeta }\), this leads to
that implies
This clearly determines \(\mathcal K\). \(\square \)
If the kernel \(\mathcal M\) is known to be a disc \(\varrho \mathcal D\), then any one of the functions \(\mathrm{S}_{\varrho \mathcal D;\mathcal K}^{}\) and \(\mathrm{C}_{\varrho \mathcal D;\mathcal K}^{}\) can determine concentric discs by its constant value.
Theorem 3.2
Assume that one of the functions \(\mathrm{S}_{\varrho \mathcal D;\mathcal K}^{}\) and \(\mathrm{C}_{\varrho \mathcal D;\mathcal K}^{}\) is constant, where \(\mathcal D\) is the unit disc. Then \(\mathcal K\) is a disc centred to the origin.
Proof
If \(\mathrm{S}_{\varrho \mathcal D;\mathcal K}^{}\) is constant, then this theorem is [1, Theorem 1].
If \(\mathrm{C}_{\varrho \mathcal D;\mathcal K}^{}\) is constant, the derivative of \(\mathrm{C}_{\varrho \mathcal D;\mathcal K}^{}\) is zero, hence—using the notations of the previous proof—\(a(\xi )=b(\xi )\) for every \(\xi \in [0,2\pi )\), that is, the point \({\varvec{h}}(\xi )\) is the midpoint of the segment \(\overline{{\varvec{a}}(\xi ){\varvec{b}}(\xi )}\) on \(\hbar (\varrho ,{\varvec{u}}_{\xi })\).
Let us consider the chord-map \(C:\partial \mathcal K\rightarrow \partial \mathcal K\), that is defined by \(C({\varvec{b}}(\xi ))={\varvec{a}}(\xi )\) for every \(\xi \in [0,2\pi )\). This is clearly a bijective map. If \({\varvec{\ell }}_0\in \partial \mathcal K\), then by \(a(\xi )=b(\xi )\) the whole sequence \({\varvec{\ell }}_i=C^i({\varvec{\ell }})\), where \(C^i\) means the \(i\) consecutive usage of \(C\), are on a concentric circle of radius \(|{\varvec{\ell }}_0|\). Moreover, every point \({\varvec{\ell }}_i\) (\(i>0\)) is the concentric rotation of \({\varvec{\ell }}_{i-1}\) with angle \(\lambda =2\arccos (\tfrac{\varrho }{|{\varvec{\ell }}_0|})\). It is well known [4, Proposition 1.3.3] that such a sequence is dense in \(\partial \mathcal K\) if \(\tfrac{\lambda }{\pi }\) is irrational, or it is finitely periodic in \(\partial \mathcal K\) if \(\tfrac{\lambda }{\pi }\) is rational. However, if \(\mathcal K\) is not a disc, then there is surely a point \({\varvec{\ell }}\in \partial \mathcal K\) for which \(\tfrac{2\arccos (\tfrac{\varrho }{|{\varvec{\ell }}_0|})}{\pi }\) is irrational, hence \(\mathcal K\) must be a concentric disc. \(\square \)
4 Measures of convex bodies
In this section the dimension of the space is \(n=2,3,\dots \). As a shorthand we introduce the notations
where \(\varrho \mathcal B^{n}\) is the ball of radius \(\varrho >0\) centred to the origin and \(\hbar ^+\) is the appropriate half space bordered by \(\hbar \).
Lemma 4.1
If the convex body \(\mathcal K\) in \({\mathbb {R}}^n\) contains in its interior the ball \(\varrho \mathcal B^n\), then
Proof
We have
The inner integral is the surface of the hyperspherical cap. The height of this hyperspherical cap is \(h=1-\tfrac{\varrho }{|{\varvec{x}}|}\), hence by the well-known formula [13] we obtain
This proves the lemma. \(\square \)
Note that the weight in (4.3) is \(\frac{\pi ^{}}{\Gamma (1)} I_{1-\frac{\varrho ^2}{|{\varvec{x}}|^2}}(\frac{1}{2},\frac{1}{2}) =2\arccos (\tfrac{\varrho }{|{\varvec{x}}|})\) for dimension \(n=2\), and it is \(\frac{\pi ^{3/2}}{\Gamma (\tfrac{3}{2})} I_{1-\frac{\varrho ^2}{|{\varvec{x}}|^2}}(1,\frac{1}{2}) =2\pi (1-\tfrac{\varrho }{|{\varvec{x}}|})\) for dimension \(n=3\).
Lemma 4.2
Let the convex body \(\mathcal K\) contain in its interior the ball \(\varrho \mathcal B^{n}\). Then the integral of the section function is
Proof
Observe, that using (4.3) we have for any \(\varepsilon >0\) that
hence
As
the statement is proved. \(\square \)
Note that the weight in (4.4) is \(\frac{2}{\sqrt{{\varvec{x}}^2-\varrho ^2}}\) in the plane, and \(2\pi /|{\varvec{x}}|\) in dimension \(n=3\), which is independent from \(\varrho \)!
A version of the following lemma first appeared in [9].
Lemma 4.3
Let \(\omega _i \, (i=1,2)\) be weights and let \(\mathcal K\) and \(\mathcal L\) be convex bodies containing the unit ball \(\mathcal B\). If \(V_1(\mathcal K)\le V_1(\mathcal L)\) and
-
(1)
Either \(\tfrac{\omega _2}{\omega _1}\) is a constant \(c_{\mathcal K}\) on \(\partial \mathcal K\) and \(\frac{\omega _2}{\omega _1}(X) \left\{ \begin{array}{ll} \ge c_{\mathcal K},&{}if X\notin \mathcal K,\\ \le c_{\mathcal K},&{}if X\in \mathcal K, \end{array}\right. \) where equality may occur in a set of measure zero at most,
-
(2)
or \(\tfrac{\omega _2}{\omega _1}\) is a constant \(c_{\mathcal L}\) on \(\partial \mathcal L\) and \(\frac{\omega _2}{\omega _1}(X) \left\{ \begin{array}{ll} \le c_{\mathcal L},&{} if X\notin \mathcal L,\\ \ge c_{\mathcal L},&{} if X\in \mathcal L, \end{array}\right. \) where equality may occur in a set of measure zero at most,
then \(V_2({\mathcal K})\le V_2({\mathcal L})\), where equality is if and only if \(\mathcal K=\mathcal L\).
Proof
We have
that proves the theorem. \(\square \)
5 Ball characterizations
Although the following results are valid also in the plane, their points are for higher dimensions.
Theorem 5.1
Let \(0<\varrho _1<\varrho _2<\bar{r}\) and let \(\mathcal K\) be a convex body having \(\varrho _2\mathcal B\) in its interior. If \(\mathrm{C}_{\varrho _1;\mathcal K}^{}=\mathrm{C}_{\varrho _1;\bar{r}\mathcal B}^{}\) and \(\mathrm{C}_{\varrho _2;\mathcal K}^{}=\mathrm{C}_{\varrho _2;\bar{r}\mathcal B}^{}\), then \(\mathcal K\equiv \bar{r}\mathcal B\), where \(\mathcal B\) is the unit ball.
Proof
Let \(\bar{\omega }_1(r)=I_{\frac{r^2-\varrho _1^2}{r^2}}(\frac{n-1}{2},\frac{1}{2})\) and \(\bar{\omega }_2(r)=I_{\frac{r^2-\varrho _2^2}{r^2}}(\frac{n-1}{2},\frac{1}{2})\) for every non-vanishing \(r\in {\mathbb {R}}\), where \(I\) is the regularized incomplete beta function, and define \(\omega _1({\varvec{x}}):=\bar{\omega }_1(|{\varvec{x}}|)\) and \(\omega _2({\varvec{x}}):=\bar{\omega }_2(|{\varvec{x}}|)\).
By formula (4.3) in Lemma 4.1 we have
and similarly
With the notations in Lemma 4.3, these mean \(V_1(\mathcal K)=V_1(\bar{r}\mathcal B)\) and \(V_2(\mathcal K)=V_2(\bar{r}\mathcal B)\).
Further, one can easily see that
is constant on every sphere, especially on \(\bar{r}{\mathbb {S}}^{n-1}\).
As \(\bar{\omega }_1\) and \(\bar{\omega }_2\) are both strictly increasing, \(q_n\) is strictly decreasing if and only if
First calculate for any \(n\in {\mathbb {N}}\) that
then consider for \(n\ge 4\) that
From the two equations above we deduce
where in the last inequality we used \(\varrho _1<\varrho _2\). Thus, for \(n\ge 4\) we have proved (5.1).
Assume now, that \(n<4\). It is easy to see that
hence differentiation leads to
This is clearly negative for all \(r\) if \(n=2\) and \(n=3\), hence
proving (5.1) for \(n\le 3\).
Thus, \(\frac{\bar{\omega }_1(r)}{\bar{\omega }_2(r)}\) is strictly monotone decreasing in any dimension, hence \(\mathcal K\equiv \bar{r}\mathcal B\) follows from Lemma 4.3. \(\square \)
Theorem 5.2
Let \(0<\varrho _1<\varrho _2<\bar{r}\) and the dimension be \(n\ne 3\). If \(\mathcal K\) is a convex body having \(\varrho _2\mathcal B\) in its interior, and \(\mathrm{S}_{\varrho _1;\mathcal K}^{}\equiv \mathrm{S}_{\varrho _1;\bar{r}\mathcal B}^{}\), \(\mathrm{S}_{\varrho _2;\mathcal K}^{}\equiv \mathrm{S}_{\varrho _2;\bar{r}\mathcal B}^{}\), then \(\mathcal K\equiv \bar{r}\mathcal B\).
Proof
Let \(\bar{\omega }_1(r)=(r^2-\varrho _1^2)^{\frac{n-3}{2}}r^{2-n}\) and \(\bar{\omega }_2(r)=(r^2-\varrho _2^2)^{\frac{n-3}{2}}r^{2-n}\) for every non-vanishing \(r\in {\mathbb {R}}\), and define \(\omega _1({\varvec{x}}):=\bar{\omega }_1(|{\varvec{x}}|)\) and \(\omega _2({\varvec{x}}):=\bar{\omega }_2(|{\varvec{x}}|)\).
By formula (4.4) in Lemma 4.2 we have
and similarly
With the notations in Lemma 4.3, these mean \(V_1(\mathcal K)=V_1(\bar{r}\mathcal B)\) and \(V_2(\mathcal K)=V_2(\bar{r}\mathcal B)\).
The ratio \( \frac{\omega _1({\varvec{x}})}{\omega _2({\varvec{x}})} =\frac{\bar{\omega }_1(|{\varvec{x}}|)}{\bar{\omega }_2(|{\varvec{x}}|)} \) is obviously constant on every sphere, especially on \(\bar{r}{\mathbb {S}}^{n-1}\), and it is
Thus, \(\frac{\bar{\omega }_1(r)}{\bar{\omega }_2(r)}\) is strictly monotone if the dimension \(n\ne 3\), hence \(\mathcal K\equiv \bar{r}\mathcal B\) follows from Lemma 4.3 for dimensions other than \(3\). \(\square \)
This theorem leaves the question open in dimension \(3\) if \(\mathrm{S}_{\varrho _1;\mathcal K}^{}\equiv \mathrm{S}_{\varrho _1;\bar{r}\mathcal B}^{}\) and \(\mathrm{S}_{\varrho _2;\mathcal K}^{}\equiv \mathrm{S}_{\varrho _2;\bar{r}\mathcal B}^{}\) imply \(\mathcal K\equiv \bar{r}\mathcal B\). We have not yet tried to find an answer.
The following generalizes Theorem 3.1 for most dimensions, but only for spheres.
Theorem 5.3
Let \(\varrho _1,\varrho _2\in (0,\bar{r})\) and let \(\mathcal K\) be a convex body in \({\mathbb {R}}^n\) having \(\max (\varrho _1,\varrho _2)\mathcal B\) in its interior. If \(\mathrm{S}_{\varrho _1;\mathcal K}^{}\equiv \mathrm{S}_{\varrho _1;\bar{r}\mathcal B}^{}\) and \(\mathrm{C}_{\varrho _2;\mathcal K}^{}\equiv \mathrm{C}_{\varrho _2;\bar{r}\mathcal B}^{}\), and
-
(1)
\(n=2\) or \(n=3\), or
-
(2)
\(n\ge 4\) and \(\varrho _1\le \varrho _2\),
then \(\mathcal K\equiv \bar{r}\mathcal B\).
Proof
Let \(\bar{\omega }_1(r)=(r^2-\varrho _1^2)^{\frac{n-3}{2}}r^{2-n}\) and and \(\bar{\omega }_2(r)=I_{\frac{r^2-\varrho _2^2}{r^2}}(\frac{n-1}{2},\frac{1}{2})\) for every non-vanishing \(r\in {\mathbb {R}}\), and define \(\omega _1({\varvec{x}}):=\bar{\omega }_1(|{\varvec{x}}|)\) and \(\omega _2({\varvec{x}}):=\bar{\omega }_2(|{\varvec{x}}|)\).
By formula (4.4) in Lemma 4.2 we have
and by formula (4.3) in Lemma 4.1 we have
With the notations in Lemma 4.3, these mean \(V_1(\mathcal K)=V_1(\bar{r}\mathcal B)\) and \(V_2(\mathcal K)=V_2(\bar{r}\mathcal B)\).
The ratio \( \frac{\omega _2({\varvec{x}})}{\omega _1({\varvec{x}})} =\frac{\bar{\omega }_2(|{\varvec{x}}|)}{\bar{\omega }_1(|{\varvec{x}}|)} \) is obviously constant on every sphere, especially on \(\bar{r}{\mathbb {S}}^{n-1}\), and it is
if \(n>3\). For other values of \(n\) we have
Thus, \(\frac{\bar{\omega }_2(r)}{\bar{\omega }_1(r)}\) is strictly monotone increasing if \(n=2,3\) and it is also strictly monotone increasing if \(n>3\) and \(\varrho _1\le \varrho _2\). In these cases Lemma 4.3 implies \(\mathcal K\equiv \bar{r}\mathcal B\). \(\square \)
This theorem leaves open the case when \(\varrho _1>\varrho _2\) in dimensions \(n>3\). We have not yet tried to complete our theorem.
6 Discussion
Barker and Larman conjectured in [1, Conjecture 2] that in the plane \(\mathcal M\)-equisectioned convex bodies coincide, but they were unable to justify this in full.Footnote 3 Nevertheless they proved, among others, that a \(\mathcal D\)-isosectioned convex body \(\mathcal K\) in the plane is a disc concentric to the disc \(\mathcal D\).
Having a convex body \(\mathcal K\) that is sphere-isocapped with respect to two concentric spheres raises the problem if there is a concentric ball \(\bar{r}\mathcal B\)—obviously sphere-isocapped with respect to that two concentric spheres—that is sphere-equicapped to \(\mathcal K\) with respect to that two concentric spheres. The very same problem exists also for bodies that are sphere-isosectioned with respect to two concentric spheres. So we have the following range characterization problems: Let \(0<\varrho _1<\varrho _2\) and let \(c_{1}>c_{2}>0\) be positive constants. Is there a convex body \(\mathcal K\) containing the ball \(\varrho _2\mathcal B\) in its interior and satisfying
-
(i)
\(c_{1}\equiv \mathrm{C}_{\varrho _1;\mathcal K}^{}\) and \(c_{2}\equiv \mathrm{C}_{\varrho _2;\mathcal K}^{}\) (raised by Theorem 5.1)?
-
(ii)
\(c_{1}\equiv \mathrm{S}_{\varrho _1;\mathcal K}^{}\) and \(c_{2}\equiv \mathrm{S}_{\varrho _2;\mathcal K}^{}\) (raised by Theorem 5.2)?
-
(iii)
\(c_{1}\equiv \mathrm{S}_{\varrho _1;\mathcal K}^{}\) and \(c_{1}\equiv \mathrm{C}_{\varrho _1;\mathcal K}^{}\) (raised by Theorem 5.3)?
In the plane if \(\mathcal M\) is allowed to shrink to a point (empty interior), then \(\mathrm{S}_{\mathcal M;\mathcal K}^{}\) is the X-ray picture at a point source [3] investigated by Falconer in [2]. The method used in Falconer’s article made Barker and Larman mention in [1] that in dimension \(2\) the convex body \(\mathcal K\) can be determined from \(\mathrm{S}_{\mathcal M;\mathcal K}^{}\) and \(\mathrm{S}_{\mathcal M';\mathcal K}^{}\) if \(\partial \mathcal M\) and \(\partial \mathcal M'\) are intersecting each other in a suitable manner. The method in the anticipated proof presented in [1] decisively depends on the condition of proper intersection.
Finally we note that determining a convex body by its constant width and constant brightness [8] sounds very similar a problem as the ones investigated in this paper. Moreover also the result is analogous to Theorem 5.3.
Notes
[1, Theorem 1] gives the same conclusion in the plane for disc-isosectioned convex bodies
Although \(\hbar ({\varvec{u}}_{{\varvec{\xi }}},r)=\hbar (-{\varvec{u}}_{{\varvec{\xi }}},-r)\) this parametrization is locally bijective.
Recently Kincses [5] informed the authors in detail that he is very close to finish the construction of two different \(\mathcal D\)-equisectioned convex bodies \(\mathcal K_1\) and \(\mathcal K_2\) in the plane for a disk \(\mathcal D\).
References
Barker, J.A., Larman, D.G.: Determination of convex bodies by certain sets of sectional volumes. Discrete Math. 241, 79–96 (2001)
Falconer, K.J.: X-ray problems for point sources. Proc. Lond. Math. Soc. 46, 241–262 (1983)
Gardner, R.J.: Geometric Tomography, 2nd edn. Encyclopedia of Mathematics and its Applications, vol. 58. Cambridge University Press, Cambridge (2006) (1st edition in 1996)
Katok, A., Hasselblatt, B.: Introduction to the Modern Theory of Dynamical Systems. Cambridge University Press, Cambridge (1995)
Kincses, J.: Oral discussion (2013)
Kurusa, Á., Ódor, T.: Isoptic characterization of spheres, manuscript (2014)
Kurusa, Á., Ódor, T.: Spherical floating body, manuscript (2014)
Nakajima, S.: Eine charakteristicische Eigenschaft der Kugel. Jber. Dtsch. Math. Verein 35, 298–300 (1926)
Ódor, T.: Rekonstrukciós, karakterizációs és extrémum problémák a geometriában. PhD dissertation, Budapest (1994) (in hungarian; title in english: Problems of reconstruction, characterization and extremum in geometry)
Ódor, T.: Ball characterizations by visual angles and sections, unpublished manuscript (2003)
Wikipedia: Beta function. http://en.wikipedia.org/wiki/Beta_function
Wikipedia: Gamma function. http://en.wikipedia.org/wiki/Gamma_function
Wikipedia: Spherical cap. http://en.wikipedia.org/wiki/Spherical_cap
Acknowledgments
This research was supported by the European Union and co-funded by the European Social Fund under the project “Telemedicine-focused research activities on the field of Mathematics, Informatics and Medical sciences” of project number ‘TÁMOP-4.2.2.A-11/1/KONV-2012-0073”. The authors appreciate János Kincses for discussions of the problems solved in this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kurusa, Á., Ódor, T. Characterizations of balls by sections and caps. Beitr Algebra Geom 56, 459–471 (2015). https://doi.org/10.1007/s13366-014-0203-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13366-014-0203-9