
Abstract
Human hands sweat in different circumstances and the presence of sweat can alter the friction between the hand and contacting surface. It is, therefore, important to understand how hand moisture varies between people, during different activities and the effect of this on friction. In this study, a survey of fingertip moisture was done. Friction tests were then carried out to investigate the effect of moisture. Moisture was added to the surface of the finger, the finger was soaked in water, and water was added to the counter-surface; the friction of the contact was then measured. It was found that the friction increased, up until a certain level of moisture and then decreased. The increase in friction has previously been explained by viscous shearing, water absorption and capillary adhesion. The results from the experiments enabled the mechanisms to be investigated analytically. This study found that water absorption is the principle mechanism responsible for the increase in friction, followed by capillary adhesion, although it was not conclusively proved that this contributes significantly. Both these mechanisms increase friction by increasing the area of contact and therefore adhesion. Viscous shearing in the liquid bridges has negligible effect. There are, however, many limitations in the modelling that need further exploration.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Everyday handling of objects often occurs when a person is perspiring or in wet conditions. Examples of when moisture may have an adverse effect on grip and hence safety or performance include the use of knives and other implements; opening packaging in a kitchen environment where hands may be wet; handling washing and grooming products in the bathroom; manual workers using tools for a variety of tasks outdoors and sportsmen and women using equipment with sweaty hands.
In order to improve safety and performance, the design of products, therefore, needs to take into consideration the effect different levels of moisture can have on the ease of gripping and manipulating an object. To enable this, a greater understanding of how much moisture can be present when different tasks are being carried out as well as the fundamental effects of moisture on friction is required.
The effects of a number of parameters on finger friction, have been investigated previously, for example, load [1–3], surface textures, different materials, contact area and moisture (for more details see the reviews of finger and skin tribology in references [4] and [5]). ‘Real’ contact area is perhaps the biggest influencing factor on finger friction and this is affected significantly by the parameters mentioned above. Whilst the effect of some of these is well characterised there is still more work to be done on investigating and, in particular, modelling moisture effects and generation of moisture through sweating.
Mackenzie and Iberall [6] found qualitatively that the fingers sweat more when gripping an object and it is also known, from personal experience, that hands sweat in high temperatures, during physical exercise or when a person is feeling nervous. A more recent study by Andre et al. [7] has combined force and moisture measurement in a static fingertip contact to quantify the level of grip force that may affect moisture generation. The surface material here is limited, however, to that of the moisture measuring transducer.
Moisture has been seen to have an interesting effect on friction. There is an initial increase in friction as moisture levels rise, before a threshold is reached and the levels reduce. This has been described as a bell-curve response and has been reported by a number of authors [8, 9]. Other authors, while seeing an increase with rising moisture levels, did not note a bell curve [10–12]. The reasons for this will be mentioned in the discussion, but were probably that these studies did not reach the level of moisture where friction starts to reduce and that they tested other parts of the body.
Several mechanisms have been proposed that may contribute to the initial increase [13]:
-
The finger absorbs the water and becomes more supple, which increases the contact area, and therefore, increases the coefficient of friction [14].
-
Liquid bridges form between the ridges on the finger and the counter face and the resulting increase in friction is due to viscous shearing [13].
These previous studies [13–16] yielded some interesting results as to how the coefficient of friction changes with the addition of water. However, it is hard to relate these results directly back to the design of objects. Information concerning the amount of surface moisture required to either cause an increase in friction, a maximum level of friction or a reduction in friction, will help this. Once this is known it can be related back to activities where these levels of moisture are present.
This study tackles these issues, using a survey to examine how fingertip moisture varies from person to person, what activities cause it to increase (and to what extent) and how the moisture changes during activities. Friction tests were then carried out at different levels of surface moisture to gain insights of how the coefficient of friction changes with moisture when in contact with different materials. The effects of moisture can then be linked to the situation where this level of moisture was observed. Finally, some simple modelling was carried out to estimate the effect of the three proposed mechanisms causing an initial rise in friction with moisture present.
It should be noted that the test conditions (low load and no cyclic finger movement) and surface roughness’ used were such that deformation is unlikely to contribute to friction.
2 Method
2.1 Moisture Surveys
Surveys were carried out to look at how moisture varied between people and during different activities. The initial surveys of moisture looked at variation from person to person. These were done by taking measurements of a group of people participating in the same activity. These activities included using a computer (30 people) and sitting in a lecture theatre (15 people). The readings were taken from the middle finger of the dominant hand (also used in the friction tests) and all tests were done three times and an average taken.
The second series of tests looked at the variation for a single person. Studies of how people’s moisture changed during the day were done using individual surveys (3 male, aged 24–36 and 2 female, aged 25–27). There were also more focussed studies done on one person’s finger (female, aged 22) to examine in more detail how the moisture on the finger changes when gripping an object. These tests consisted of a comparison between the left and right hand, to confirm the moisture readings were similar. Following this, tests were done with one hand writing with a plastic ball point pen and then resting. The change in moisture, on each hand was monitored every minute.
A Moistsense device was used as a measure of skin hydration (see [17]) for more details). This is a commercially available device that uses a change in capacitance to measure skin hydration. From disassembly of the device it was shown to use a similar sensor to other skin moisture measurement devices; in that it has capacitor plates covered by an insulating layer. This sensor then contacts the skin. The insulating layer stops direct electrical conductance between the skin and the sensor. The capacitance of the contacting skin is then measured. A scaled (arbitary) reading is then shown on the sensor display (0–99). Since it is not a parallel plate capacitor, correlation of the measured capacitance to the level of hydration of the skin is not possible, without the use of equipment capable of measuring this quantity directly. Therefore, the linearity of the device was double checked by replacing the sensor with different capacitors, the reading of the device was linearly related to the attached capacitance. The device was then compared to an existing skin moisture measurement device, namely the corneometer® CM 825. The Moistsense measurements had a linear correlation to the corneometer readings. Such that a dry skin corneometer measurement (20) correlated to a Moistsense reading of 19; a normal skin corneometer reading (55) correlated to a Moistsense reading of 49 and a moist skin corneometer reading (85) correlated to a Moistsense reading of 70.
2.2 Friction Tests
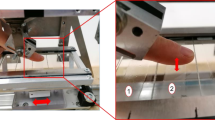
A finger friction rig, shown in Fig. 1, was used to take the friction measurements; a full description of the rig can be found in [18]. The rig uses two load cells to measure both the friction and normal forces. The middle finger of the dominant hand was used in the tests, as this was shown in pre-tests to give the most consistent results. The finger was presented to the surface so that the largest area of the upper section (distal phalanx) of the finger was parallel to the surface. The angle between the surface and the finger, after the interphalangeal joint, ranged between 22° and 26°. The finger was then moved linearly towards the body. The volunteer tried to keep a constant speed for each test, counting slowly from 1 to 5 from start to finish of the slide. This method has been proven as a simple, but effective method of limiting the speed across the tests (approximately 14–20 mms−1). Load control was achieved by careful monitoring of the values on a screen next to the test rig, although it was still quite hard to achieve repeatability between tests. The load friction relationship has been shown previously to be two part linear relationship with the transition occurring around 2–5 N. Care was taken to ensure that testing was carried out either above or below the transition point. Clearly absolute values of friction cannot, therefore, be compared between the different materials tested, but the effect of moisture can still be characterised.

Schematic of finger friction rig
Fingers were washed with soap before the tests. The sebum was not deliberately removed, the washing was intended to remove contaminants to ensure repeatability.
The friction tests were split into five sections. Initially one volunteer (female, aged 22 years) was used to test the effect of moisture on the finger contacting various materials (shown in Table 1). The normal force was not restricted in these tests and the range of loads applied can be seen in Table 1.
Tap water (at room temperature) was used to moisten the middle finger tip and simulate sweat. This was justified as the sweat on the palms of the hands is different to other parts of the body, it is composed of 99% water and 1% other solids [13], with only a 2% increase in viscosity compared to water alone.
Water was applied to the fingers using various methods to achieve a range of moisture values. The methods of application and corresponding Moistsense readings are shown in Table 2. The time between water application and test was 12 ± 3 s. This was kept as short as possible to try to avoid either too much absorption of water into the stratum corneum or evaporation. The amounts of water (see Table 2) were quantified by placing a paper towel on a set of weighing scales, applying water as required and measuring the mass loss following a finger dab. It was not possible, however, to quantify the water on the finger tip for the case where water was applied and then the finger was dabbed on a dry towel. Following a test run the finger was dried and rested until the Moistsense reading of both the middle and the ring finger returned to 40 ± 2 au. These tests were done at a temperature of 19.8 °C and relative humidity of 45%. There is very little difference between the moisture reading of the ring finger and middle finger (maximum 2 au), so both fingers were wetted in the same way at the same time. The Moistsense reading was then taken from the ring finger, and the friction test was done on the middle finger, to avoid the Moistsense reading affecting the amount of moisture on the finger.
The second series of tests was done with a female’s (aged 25) middle finger contacting PVC, with increased control of the load applied giving a much lower spread. The normal load applied was 11.7 ± 1.8 N. The water was applied in a similar manner to the first series of tests.
The third series of tests were done on a female’s middle finger (aged 25) by adding moisture directly to the surface of the PVC and then a dry finger contacted the surface. A Bionaire Ultrasonic Humidifier BU1300 W, with an attached plastic tube (with an area of 855 mm2) was used to apply water to the PVC surface (area exposed was 2 cm × 6 cm) at a constant rate of approximately 46.3 mm3 s−1. The application tube was held on the surface for varying length of time. The surface was covered with droplets of water from the spray, therefore, there will not have been full coverage until a threshold amount was reached. The droplets were, however, evenly distributed over the surface of the PVC. Friction tests were then done immediately after water application, with a finger that had a Moistsense reading of 38 au before each slide and in an environment of 19.8 °C and 56% humidity. The normal force applied was 15.0 ± 1.7 N.
In the fourth series of tests a female (aged 23) volunteer’s finger was soaked in water for varying amounts of time, up to a maximum of 3 min, and then dried with a paper towel. The friction tests were then done on this finger at a load of 5.3 ± 1.9 N.
In the fifth series of tests water was added to the surface of the PVC using a Bionnaire Humidifier. The application tube was held on the surface for varying times. The friction test was then done with the dried, soaked finger (3 min soaking), along the wet PVC surface. The applied load for these friction tests was 5.2 ± 1.2 N. All the friction tests are summarised in Table 3.
3 Results
3.1 Moisture Surveys
The results from the moisture surveys are shown in Figs. 2, 3 and 4. The moisture is shown to vary from person to person, whilst in the same environment or doing the same activity. Figure 2a shows that there is variation from 40 to 99 + au, for people in the same computer room. The maximum reading of the Moistsense is 99 au, after which it gives an error reading, so the distribution of moisture levels above this cannot be quantified. The activity they were doing will have varied slightly; some people doing more typing, others using the mouse more and others doing more written work. There was a variation in hydration levels seen in the Lecture Theatre, as shown in Fig. 2b, however, this was not as great as that seen in the computer room. This is thought to be because the participants were mainly at rest. The values are very high, but the room was very hot (the temperature and humidity were not recorded to quantify this). In Fig. 3 all the data of the individual surveys is grouped together, but when analysed in more detail, they not only show a large variation between people doing nominally the same activity, but also for a single person. In one person’s survey (male aged 36) he recorded 65 au for typing at one point in the day, and then 93 au for typing later on in the day.

Results from survey of people in the computer room (a) and lecture theatre (b)

Variation of moisture throughout the course of a day, grouped for five people. To display the data, an error reading (because of too much moisture) has been replaced by a reading of 100 au

Change in skin hydration, with time, whilst writing
The hydration of the fingers varies depending on a given activity. In the survey of people in the computer room (Fig. 2a) it was found that the majority of people had a high hydration level, since they were all operating a computer or writing. Also, Fig. 3, the survey of hydration throughout the day, shows that there is a significant increase in the Moistsense reading from at rest to when the person is taking part in an activity. Figure 4 examines this in more depth looking at how finger moisture increases during the gripping of a pen and writing. This shows that there is an increase in finger hydration the longer the time of activity.
3.2 Finger Friction
Figure 5 shows a similar pattern for all the materials tested, in that the friction increases with a small amount of moisture, and then a subsequent decrease in the measured friction is observed at higher levels of moisture. The peak in friction is similar for most materials and the general shapes could be considered to be quite similar, particularly given the high levels of scatter inherent in such measurements. For polypropylene, HDPE, brass and stainless steel 316 the friction peaks at a Moistsense reading of approximately 70–83. For PVC and aluminium 2024 the peak is at approximately 80–88.

Variation of coefficient of friction with moisture for all materials tested in Series 1 of the friction tests (see Table 3 for details) (Moistsense reading error ±2; friction coefficient error ±0.4%). a Polypropylene, b Brass, c Aluminium, d Steel, e PVC, f HDPE
The results from the Series 2 friction tests carried out on PVC are shown in Fig. 6. The general trend of friction follows that of the previous PVC tests, with the maxima being located at the same Moistsense reading. The friction forces ranged between 3 N (dry) and 9 N (at peak moist measurement). The increase in the coefficient of friction with moisture is different to the previous tests due to a different person’s fingers being used in these tests which could lead to a different contact area and/or water absorption characteristics etc.

Change in coefficient of friction for PVC (Series 2 tests) with added water (friction coefficient error ±0.4%)
Figure 7 shows that for the Series 3 tests, as seen in the results from the two friction tests (water added to the surface of the finger), there is an increase in friction with a small amount of water added to the counter-surface (PVC) and then the friction reduces after 25 s worth of moisture has been applied using the humidifiers. Clearly, at this point sufficient water is present for a full film to form between the finger and the PVC. It should be noted that time point 0 is the skin in its natural condition.

Results from Series 3 tests (see Table 3) where water was applied directly to the surface of PVC (friction coefficient error ±0.4%; time error ±0.5 s)
It would have been more appropriate to plot friction against volume of water in Fig. 7, but it is too difficult to assess how much water is actually on the skin.
In the fourth series of tests, as predicted from the study of Adams et al. [14] on the human forearm, soaking the finger in water increases the coefficient of friction between the dry PVC and contacting finger. Figure 8 shows that for the volunteer tested, there was a plateau after only 30 s of soaking.

Increase in friction when the finger is soaked in water for varying times before the friction test (Series 4 tests, see Table 3)
The starting (zero) point for Fig. 9 corresponds to the end point of Fig. 8, i.e. the finger was soaked for 3 min, surface water was removed through dabbing a dry paper towel and then testing was done on a dry surface. The values at these points accordingly match up well. Figure 9 shows that as the moisture is now added to the PVC surface the friction reduces. After 3 min of soaking the finger would not be expected to absorb any more water so a contact area increase would not occur that could increase friction. Also the soaked finger surface will be smoother due to the finger pad swelling (as observed by Hendriks [10] and Adams et al. [14]), and also there will probably still be surface water, which the paper towel drying did not remove. The smoother the finger the more likely it is that a fluid film will form thereby reducing friction.

The change in friction when water is applied to the surface of the PVC, after the finger has been soaked in water for 3 min (Series 5 tests, see Table 3)
4 Discussion
4.1 Moisture Surveys
Theory states that the hands sweat as part of the ‘fight or flight’ mechanism. It is postulated that the hands and feet sweat to increase friction with the contacting surface, increasing the ability of a person to escape dangerous situations [19].
The moisture survey showed an increase in moisture occurred when the hands were active (i.e. ‘in flight’) and the results from the friction tests showed that friction data also increased as the moisture increased.
It is difficult to directly compare the quantitative results from the moisture survey and the friction tests, as they were carried out on different test subjects and under a wide range of ambient conditions. This is a limitation of the study. However, some qualitative points can be drawn out.
The high levels of moisture noted in the surveys did not always correlate exactly to the moisture level at maximum friction (85 au) (which is unsurprising given the points raised above) (see Figs. 5, 6). However, they were at a general level that corresponded to increased friction (80–90 au). Moisture absorption is a dynamic process and probably non-linear, so the lack of correlation is not surprising. When tests subjects were exercising, however, moisture increased to a level (99 + au). Here, sweat could have the effect of reducing friction and decrease their ability to grip.
4.2 Finger Friction Response with Moisture
The first two sets of friction tests, Series 1 and 2, varying levels of moisture with different materials (see Table 3 and Figs. 5, 6) indicated that initially friction increased before decreasing beyond a threshold of around 80–90 au, giving a bell curve. As noted earlier, this effect has been observed by other authors [8, 9]. Other authors, however, did not note a bell curve [10–12]. This could be for a number of reasons. They were studying distinctly different areas of the body (probe against forearm/cheek and textile against forearm, respectively) which will reduce the comparability with the finger contact. Also Hendriks [10] only went up to a moisture level of 80 au which means the testing stopped short of the threshold found in this study and Gerhardt [12] stopped even earlier, below 60 au. This gives confidence in the bell curve as a real effect. However, there is no work in terms of modelling that has explained what exactly is causing the effect.
4.3 Material Effects
As can be seen in Fig. 5, which shows friction results for the different materials tested, some interesting results are revealed. For example, results for Steel differ from those for Polypropylene and Brass despite having similar roughness values. Also Polypropylene and Brass have similar friction values, but different roughness values. It would probably be expected that roughness would dominate in determining friction values. It is speculated, therefore, that hydrophilic/hydrophobic interactions between finger skin and the different materials could also be having an effect on friction. The level of hydrophilia (or hydrophobia) were not measured in this study and obtaining directly comparable water contact data from the literature is difficult as the results are very dependent on the measurement technique. Some qualitative discussion is, however, possible.
Polypropylene is known to be hydrophobic and glass is known to be hydrophilic. In a previous study [14], Polypropylene and glass probes were dragged across skin on the forearm. Results showed that the glass probe gave lower friction despite having for similar roughness. This was attributed to a more stable film of water molecules forming on the glass.
Study by Gajewski [20] examining water contact angles across a range of materials has shown that Brass is more wettable (hydrophilic) than Steel. Both are more hydrophilic than Polypropelene and this may explain why Steel has the lowest friction coefficient in this study, following the argument of Adams et al. [14].
There is much more work that could be done in this area and it would make an interesting topic for future study.
4.4 Modelling Finger Friction Behaviour with Moisture
In order to understand the mechanisms causing the bell curve, the results from the tests in this study will be assessed in terms of the three proposed mechanisms of moisture enhanced friction (see Sect. 1):
-
moisture absorption
-
viscous shearing of liquid bridges formed
-
capillary adhesion.
4.4.1 Absorption of Moisture
The stratum corneum is the layer of the skin which is exposed to the outside environment. It is a layer of flat, dead or keratinised cells [21]; 85% of the proteins in the stratum corneum are keratin [22]. The high bipolar nature of keratin allows water to form bonds with the side-chain endings [23], easing absorption of water.
There is a great deal of work in the literature on the effects of moisture on the elastic modulus of the stratum corneum, which has shown that it can change by at least an order of magnitude under certain humidity conditions (see [10] for discussion of these effects). This reduction in stiffness in the stratum corneum in a finger pad contact will clearly increase the area of contact, and therefore, cause friction to rise.
There is a secondary effect of water absorption into the stratum corneum. Adams et al. [14], examined friction of a half sphere, glass probe contacting a forearm. They found that when water is added to the forearm, the skin swells at the surface to the extent that it can be considered as smooth. The Young’s modulus also reduces with water addition, even before the ‘smooth’ state is reached. The finger is different to the forearm, in that it has ridges on the surface and a thicker stratum corneum. While the ridges will not fully deform in a loaded contact (see [24]) where both real and nominal area increased with load from 0.1 to 5 N with a ratio of 0.3 at 1 N), it is likely that the surface will become much smoother.
The effect of water absorption into the stratum corneum can be very crudely ascertained by comparing data from Series 2 and Series 4 (see Table 3). In the Series 2 tests where varying levels of moisture were achieved by dabbing the finger with water soaked paper towels there was 12 s between application of the water and the test (i.e. some water will have been absorbed and some will have been left on the finger surface so all three possible friction mechanisms could have contributed). The maximum friction force for the ‘moist’ case was 3.9 times greater than the ‘natural’ case (see Fig. 6). In Series 4, where the finger pad was soaked in water and then the surface water was removed with a dry paper towel before testing, it was assumed that water absorption into the finger is the only cause of friction increase. Here a friction increase of 2.2 times over the ‘dry’ case was seen (see Fig. 8). It can, therefore, be crudely estimated that water absorption accounts for a factor of 2.2/3.9 = 0.56 (56%) of the overall friction increase when moisture is present. This is clearly based on very little experimental data, but indicates that water absorption potentially has a large influence on friction.
Soaking the finger skin in water may have an effect on the surface film present on skin made up of lipids (mainly sebum). This film has an effect on the adhesion of skin as shown by Pailler-Mattei et al. [25] in some indentation testing on forearm skin with and without a surface lipidic film. The adhesion force dropped from 0.5 nN with lipids to 0 N without, which may imply that friction could be reduced if water removed the lipids. In the same work, water contact angle measurements were taken. The removal of the lipidic film made skin more hydrophilic (water contact angle changed from 92° to 127°), which following the arguments presented in Sect. 4.3, would mean the friction reduction effect would be larger still. The quantitative effect this would have on friction forces in the context of the work presented in this article is not possible to ascertain, as it is not known even if the water would remove the lipids, but again this is an interesting area to explore further.
4.4.2 Viscous Shear in Liquid Bridges
Dinç et al. [13] suggested that friction increases due to ‘liquid bridges’ forming on the ridges of the fingers. Viscous shear forces needed to break down these bridges then increase the friction force. It should be noted this was a proposed theory with little corroborating evidence, but it is worth exploring.
There have been several studies examining the lubrication of a steel ball sliding and rolling on a soft elastomer surface [26–28]. However, while in some cases the Young’s modulus of the surface is comparable to the skin of the finger, in many cases the diameter of the ball is too small to represent a finger pad contact area for instance. Adams et al. [14] addressed the problem for the forearm skin using a 16 mm diameter glass probe, at a load of 0.2 N; compared to a typical pad diameter of around 32 mm). A current literature search did not find a Stribeck Curve applicable to the finger. However, some previous studies [14, 26–28] have indicated that when considering the lubrication of the finger, there are three regimes of lubrication; boundary lubrication, mixed regime lubrication and isoviscous elastohydrodynamic lubrication (IEHL). IEHL is applicable to both ‘hard’ and ‘soft’ contact surfaces where there is significant elastic deformation, but this does not increase the lubricant viscosity [26] (or put another way in IEHL it is assumed that any viscosity dependency on pressure is negligible). In this case, the finger deforms substantially (elastohydrodynamic), due to the low Young’s modulus of the finger, but the viscosity of the water in the contact is not affected by the applied load (isoviscous). The coefficient of friction due to IEHL (μ IEHL) alone can be calculated using Eq. 1 [29]:
where R is the approximated radius of the finger (16 mm, measured from the 25-years-old female test participant), E is the Young’s modulus of the finger (an average value of 0.49 MPa was used [30]), N is the normal load (in this case 11.7 N), η is the dynamic viscosity (8.90 × 10−4 Ns/m2 at 25 °C [31]) and u is the sliding velocity (19 mm/s). Poisson’s ratio is assumed to be 0.49 in the formulation of Eq. 1 [14]. Test parameters were chosen in line with Series 2 tests.
Using this calculation the coefficient of friction is only 0.0015, which equates to a friction force of only 0.013 N. However, this is possibly an underestimation, since Eq. 1 is assuming a smooth surface contact, which the finger is not. The minimum film thickness, h c, was also calculated using the equation from Johnson et al. [29].
Using the same parameters as used for the friction calculation, h c, for this case is 0.1 μm.
The dimensionless film parameter, Λ, relates lubricant film thickness to the surface roughness and is defined as shown in Eq. 3 [32]. The transition between mixed and EHL regimes occurs at Λ = 5 to 10.
where σ is rms roughness.
For the case in question, if the finger pad roughness is assumed to be 17 μm and the PVC 0.21 μm, Λ = 0.006, clearly in a boundary regime, so no film developed that would need shearing. The mixed regime referred to above is the transition between boundary and EHL where roughness is close to the fluid film thickness. In the boundary regime, the film thickness is well below the roughness.
This analysis looks at the case where a film is created that is either broken (or not) by the asperities/ridges on the surface/finger pad. Dinç et al. [13] were really looking at a different scenario where liquid bridged the gaps between ridges/surface asperities (see Fig. 10).

‘Liquid bridges’ formed at the finger pad/surface interface according to the theory proposed by Dinç et al. [13]
In order to study this scenario, the force needed to overcome a film formed only where the ridges make contact is needed. This can be predicted using Eq. 4.
where η is the dynamic viscosity, in the calculations the dynamic viscosity of water (8.90 × 10−4 Ns/m2) was used, however there will more than likely be salts in the water from the finger contact, which may modify the viscosity slightly, u is the velocity (in this case the velocity of the finger slide is used) and y is the distance from the finger to the contacting surface.
The ‘real’ area of contact for the female’s finger (aged 25) used in Series 2 and 3 tests has been measured, for use in this calculation, using ink printing. This involved applying ink and then pressing down onto a sheet of paper placed on the finger friction rig so that the normal load applied could be measured (see [33] for full details of method). This approach is the same as that used by Childs and Henson [34]. Scans of the images were post-processed using a Matlab® routine to determine the ridge contact area. Ratio of real to apparent area of contact ranged between 0.38 and 0.50 depending on load applied, which is similar to the results of Childs and Henson [34] for comparable loads. Ink printing is not the most accurate method for measurement as the ink can spread. Soneda and Nakano [24] have used a reflected light technique to determine the ridge areas and have measured ratios of around 0.55 for a similar load.
The shear stress needed to give the peak friction force increase over the dry case in test Series 2 (6 N) can be calculated using the area of ridge surface contact measured at a normal force equivalent to that used in Series 2 tests (97 mm2) and then put into Eq. 4 to calculate the film thickness:
and:
Therefore, if liquid bridges had formed in the finger contact (between ridges and the contact surface (as implied by Dinç et al. [13] the viscous shear force required to break the area of ‘bridges’ formed with a thickness of 0.27 nm film would account for the peak increase in friction force seen in the Series 2 tests. A water monolayer thickness is 0.25 nm, so this is the absolute minimum film thickness.
It is evident from the calculations here that the ‘liquid bridges’ theory is not likely to account for all the increase in friction force seen as moisture levels are increased. The modelling assumptions are very limiting. Using Newton’s law of viscosity to estimate viscous shear stresses in thin liquid films between two plates sliding over each other assumes two smooth plates (one is fixed) with a very large area so that edge effects can be ignored. However, it appears feasible that liquid bridging will make some contribution.
4.4.3 Capillary Adhesion
When two contacting materials are rough, but hard, an increase in the water between the two surfaces increases the area of contact. This is due to a force in the capillary action which pulls the surfaces together [15, 35]. However, this is not the case when one of the materials is soft. Persson [15] analysed this situation for a hard, rough surface (R q = 6 μm) contacting a smooth, elastically soft solid at a nominal applied pressure of 0.1 MPa, where the Poisson’s ratio of the soft solid was 0.5 and the Young’s modulus varied from 3 to 300 MPa. Persson [15] found that for elastically soft solids (not in this case skin, but Persson refers to a number of case studies involving biological systems in this study including tree frog feet), when the water level on the surface decreases, there is a large increase in the area of contact. This is thought to be due to the capillary adhesive forces pulling the walls of the ridges of the surfaces into closer contact.
The effect of capillary adhesion is highly dependent upon the Young’s modulus of the contacting, elastically soft material [15]. The lower the magnitude of Young’s modulus the higher the contact area induced by the action of the capillary forces. Values of the Young’s modulus of the stratum corneum vary greatly, depending on the water content of the stratum corneum [30]. Park and Badddiel [36, 37] found in vitro the Young’s modulus of skin (actually pig’s ear, which is thought to be comparable to the human stratum corneum) to be approximately 1 GPa at 50% humidity and 3 MPa in water, however Agache et al. [30] found it to be 2.1 MPa for the skin from a human back, at 22 °C and 82% relative humidity. Agache et al. [30] also carried out experiments in vivo, measuring the properties across the skin, and found these to vary greatly across the body; however, it is not possible to separate the results for just the stratum corneum. It is the Young’s modulus of the stratum corneum that will be most important in determining whether capillary adhesion will increase friction, since this is the material of the finger ridges. Absorption of water during a friction test, will reduce the Young’s modulus of the stratum corneum, and therefore, increase the effect of capillary adhesion, following Persson’s argument [15].
The results from the Series 3 tests (Fig. 7), where water was applied directly to the surface of the PVC and a dry finger was used, indicate that capillary adhesion could have occurred (or viscous shearing in liquid bridges) as the friction coefficient initially increases with increasing amount of surface water. This is assuming that not all the water on the surface is immediately absorbed into the skin. The results from the final friction tests (Fig. 9), would contradict this hypothesis, however. Here, the finger pad has been saturated so water would be expected to stay within the interface and possibly cause a capillary force increase. The finger pad in this case would be much smoother as a result of the water absorption and hence the contact may have moved out of the boundary regime hence reducing friction. This may also be enhanced by chemical/physical modification of the skin by the water having soaked the skin (reducing lipids).
In Persson’s study [15], an elastomer of Young’s modulus equal to 3 MPa (value from [36], comparable to the stratum corneum in some moist conditions), for a root mean square roughness of 6 μm (less than the finger—see [3]) quotes Ra values between 19 and 32 μm for the index finger pad), and an applied pressure of 0.1 MPa (similar to the average pressure applied in this case (0.12 MPa)), a film thickness of 0.1 nm gave a ratio of real area of contact to nominal area of contact of approximately 0.8, compared to a film thickness of 10 nm, where the ratio of real to nominal area of contact was approximately 0.3. It should be noted here that Persson [15] was using arbitrary values to study parameter effects. The thickness of a water monolayer is 0.25 nm, so 0.1 nm films would not be expected in reality.
Assuming that the modelled condition can be compared to the case of the finger, although it is not fully representative, this shows that for a film thickness ranging from 0.1 nm to 1 μm there can be a significant increase in the contact area. Since there are no details regarding the initial contact area in the finger friction tests, the corresponding increase in friction force cannot be calculated. However, the study presented by Persson [15] shows the area of contact for a film thickness of 0.1 nm is about 2.5 times greater than that for a film thickness of 10 nm. If this corresponds to an increase in friction (assuming area is proportional to friction force and a film of 0.1 nm represents the dry case), from the dry condition (≈5 N friction force—see Fig. 7, where applied normal force ≈15 N), this would be an increase of 7.5 N. Using this work to very crudely estimate the film thickness required for a 5 N increase (as seen in Fig. 7 for Series 3 tests), shows that a film thickness of 7 nm would be required. A quick estimation of the possible film thickness resulting from the water application with the Humidifier after 5 s (using 46.3 mm3/s for 5 s (time to the peak friction—see Fig. 7) over an area of 855 mm2 (water application pipe diameter)) gives a maximum thickness (assuming no spread) of 0.27 mm. It would clearly reduce as the finger is applied to the surface, but the actual final thickness is impossible to predict.
For a film thickness of 8 nm the viscous shear force (see Sect. 4.4.2) would be extremely low, so it can be inferred that capillary force effects probably outweigh those from viscous shear of liquid bridges.
4.4.4 Discussion of Modelling
This study has analysed the possible mechanisms for the increase in friction with water addition. The crude analysis of the different mechanisms indicates that water absorption into the stratum corneum has the largest effect on the friction measurement.
It has not been shown conclusively that capillary adhesion affects the friction, but it is a possibility. The film thicknesses of water under a loaded finger pad need to be more fully understood in order to determine the actual capillary forces that may occur and derive an exact split between the contributions from the different mechanisms. There are several methods to do this. One could be to use ultrasonic film measurement (see for example [38]) and the other would be ellipsometry (an optical technique for investigating the dielectric properties of thin films, see for example [39]).
There are several issues with doing both of these tests on the finger. For example, the salts on the finger dissolving in the water changing the impedance or refractive index. Equally, as the stratum corneum absorbs water, the refractive index or impedance of this may also change. The ridges will also complicate the quantification of film thickness, however, only an average film thickness is required for the estimation of capillary adhesion. Experiments to modify and verify these techniques for the finger, could be very fruitful.
It has been shown to some extent that capillary forces have a larger effect than the viscous shearing of liquid bridges, that has been previously proposed as a mechanism for increased friction. The effects of capillary adhesion can be better understood with modelling work specific to the finger contact. However, experiments need to be done to try and quantify the Young’s modulus of the finger pad skin, in vivo, at different levels of moisture, to provide a more accurate input to the computer modelling.
All the analysis presented here needs further investigation, but this study has provided a starting point for more detailed calculations.
Measurement of the film thickness could also give an indication of when the point at which sweating reduces grip occurs and friction starts to reduce again. It can be seen qualitatively in the viscous shear modelling and the capillary force calculations that higher film thickness’ give lower friction forces, and the finger can only absorb a finite amount of water before the remainder remains in the interface acting to enhance the lubricant film. Questions remain, however, related to the point at which this threshold is reached.
5 Conclusions
Experimental work has been used to show that there is an increase in finger friction when a small amount of water is added to the finger, and when a small amount is added to a nominally flat surface. The trend has been shown to occur across a range of materials.
Three potential mechanisms have previously been identified that could cause the increase seen: water absorption, which causes the skin to swell and Young’s Modulus to decrease, and therefore, the contact area to increase; capillary action, which could pull the surfaces together leading to a higher contact area and finally the formation of liquid bridges, which could increase the shear forces that must be overcome in order for the finger to slide.
Analytical modelling has indicated that the increase in friction is most likely due to a water absorption. It has been hard to prove that capillary adhesion occurs, but some experimental measurements of film thickness under the finger pad could help with this. It has been shown, however, that viscous shear is unlikely to affect friction. Past a critical amount of water the coefficient of friction reduces as it enters the mixed lubrication regime (regime between boundary lubrication and IEHL). This point has not been identified in the modelling carried out, but again film thickness measurement could help understand exactly what is occurring in the interface at the transition.
References
Tomlinson, S.E., Lewis, R., Carré, M.J.: The effect of normal force and roughness on friction in human finger contact. Wear 267, 1311–1318 (2009)
Ramalho, A., Silva, C.L., Pais, A.A.C.C., Sousa, J.J.S.: In vivo friction study of human skin: influence of moisturizers on different anatomical sites. Wear 263, 1044–1049 (2007)
Derler, S., Gerhardt, L.-C., Lenz, A., Bertaux, E., Hadad, M.: Friction of human skin against smooth and rough glass as a function of the contact pressure. Tribol. Int. 42, 1565–1574 (2009)
Sivamani, R.K., Goodman, J., Gitis, N.V., Maibach, H.I.: Coefficient of friction: tribological studies in man—an overview. Skin Res. Technol. 9, 227–234 (2003)
Tomlinson, S., Lewis, R., Carré, M.J.: Review of the frictional properties of the finger-object contact when gripping. Proc. IMechE J. Eng. Tribol. 221, 841–850 (2007)
Mackenzie, C.L., Iberall, T.: The grasping hand. Skin: an organ critical for grasp. Adv. Physiol. 104, 205–218 (1994)
André, T., De Wan, M., Lefevre, P., Thonnard, J.-L.: Moisture evaluator: a direct measure of fingertip skin hydration during object manipulation. Skin Res. Technol. 14, 385–389 (2008)
André, T., Lefevre, P., Thonnard, J.-L.: A continuous measure of fingertip friction during precision grip. J. Neurosci. Methods 179, 224–229 (2009)
Nonomura, Y., Fujii, T., Arashi, Y., Miura, T., Maeno, T., Tashiro, K., Kamikawa, Y., Monchi, R.: Tactile impression and friction of water on human skin. Colloids Surf. B: Biointerfaces 69, 264–267 (2009)
Hendriks, C.P., Franklin, S.E.: Influence of surface roughness, material and climate conditions on the friction of human skin. Tribol. Lett. 37, 361–373 (2010)
Kwiatkowska, M., Franklin, S.E., Hendriks, C.P., Kwiatkowski, K.: Friction and deformation behaviour of human skin. Wear 267, 1264–1273 (2009)
Gerhardt, L.-C., Strassle, V., Lenz, A., Spencer, N.D., Derler, S.: Influence of epidermal hydration on the friction of human skin against textiles. J. R. Soc. Interface 5, 1317–1328 (2008)
Dinç, O.S., Ettles, C.M., Calabrese, S.J., Scarton, H.A.: Some parameters affecting tactile friction. J. Tribol. 113, 512–517 (1991)
Adams, M.J., Briscoe, B.J., Johnson, S.A.: Friction and lubrication of human skin. Tribol. Lett. 26, 239–253 (2007)
Persson, B.N.J.: Capillary adhesion between elastic solids with randomly rough surfaces. J. Phys. Condens. Matter 20, 1–11 (2008)
Deleau, F., Mazuyer, D., Koenen, A.: Sliding friction at elastomer/glass contact: Influence of the wetting conditions and instability analysis. Tribol. Int. 42, 149–159 (2009)
http://www.moritexusa.com/products/product.php?plid=5&pcid=10&pid=17. Accessed 1/12/09
Tomlinson, S.E., Lewis, R., Carre, M.J.: Understanding the effect of finger-ball friction on the handling performance of rugby balls. Sports Eng. 11, 109–118 (2009)
Adelman, S., Taylor, C.R., Heglund, N.C.: Sweating on paws and palms: what is its function? Am. J. Physiol. 229, 1400–1402 (1975)
Gajewski, A.: Contact angle and sessile drop diameter hysteresis on metal surfaces. Int. J. Heat Mass Transf. 51, 4628–4636 (2008)
Eroschenko, V.P., diFio, M.S.H.: DiFiore’s Atlas of Histology with Functional Correlations. Williams and Wilkins, Lippincott (2007)
Rosen, M.R.: Delivery System Handbook for Personal Care and Cosmetic Products—Technology, Applications and Formulations. William Andrew Publishing, Norwich, NY (2005)
Lévêque, J.-L.: Water-keratin interactions. In: Fluhr, J., Berardesca, E., Elsner, P., Maibach, H.I. (eds.) Bioengineering of the Skin: Water and the Stratum Corneum. CRC Press, Boca Raton, FL (2004)
Soneda, T., Nakano, K.: Investigation of vibrotactile sensation of human fingerpads by observation of contact zones. Tribol. Int. 43, 210–217 (2010)
Pailler-Mattei, C., Nicoli, S., Pirot, F., Vargiolu, R., Zahouani, H.: A new approach to describe skin surface physical properties in vivo. Colloids Surf. B: Biointerfaces 68, 200–206 (2009)
deVicente, J., Stokes, J.R., Spikes, H.A.: Rolling and sliding friction in compliant, lubricated contact. Proc. Inst. Mech. Eng. J. 220, 55–63 (2006)
Bongaerts, J.H.H., Fourtouni, K., Stokes, J.R.: Soft-tribology: Lubrication in a compliant PDMS-PDMS contact. Tribol. Int. 40, 1531–1542 (2007)
deVicente, J., Stokes, J.R., Spikes, H.A.: Behaviour of complex fluids between highly deformable surfaces: isoviscous elastohydrodynamic lubrication. Marie Curie Fellowship Association Annals, vol. IV (2005)
Johnson, S.A., Adams M.J., Arvanitaki, A., Briscoe, B.J.: Film thickness measurements in elastohydrodynamically-lubricated elastomeric contacts. Proceedings of the 23rd Leeds/Lyon Symposium on Tribology, pp. 199–207 (1997)
Agache, P.G., Monneur, C., Leveque, J.L., Rigal, J.D.: Mechanical properties and Young’s modulus of human skin in vivo. Dermatol. Res. 269, 221–232 (1980)
Incropera, F.P., De Witt, D.P.: Introduction to Heat Transfer, 2nd edn. John Wiley & sons, New York (1990)
Hamrock, B.J.: Fundamentals of Fluid Film Lubrication. New York (1994)
Tomlinson, S.T.: Understanding the friction between human fingers and contacting surfaces. PhD Thesis, The University of Sheffield, Department of Mechanical Engineering (2009)
Childs, T.H.C., Henson, B.: Human tactile perception of screen-printed surfaces: self-report and contact mechanics experiments. Proc. IMechE J: Eng Tribol. 217, 427–441 (2007)
DelRio, F.W., Dunn, M.L., deBoer, M.P.: Capillary adhesion model for contacting micromachined surfaces. Scripta Mater. 59, 916–920 (2008)
Park, A.C., Baddiel, C.B.: Rheology of stratum corneum-I: a molecular interpretaion of the stress-strain curve. J. Cosmet. Sci. 23, 3–12 (1972)
Park, A.C., Baddiel, C.B.: The effect of saturated salt solutions on the elastic properties of stratum corneum. J. Cosmet. Sci. 23, 471–479 (1972)
Dwyer-Joyce, R.S., Drinkwater, B.W., Donohoe, C.J.: The measurement of lubricant-film thickness using ultrasound. Proc. R. Soc. Lond. A 459, 957–976 (2003)
Ohlidal, I., Franta, D.: Ellipsometry of thin film systems. In: Wolf, E. (ed.) Progress in Optics, 41st edn, pp. 181–282. Elsevier, Amsterdam (2000)
Acknowledgments
We would like to thank B. Persson, Jülich Forschungszentrum for his advice about capillary adhesion.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tomlinson, S.E., Lewis, R., Liu, X. et al. Understanding the Friction Mechanisms Between the Human Finger and Flat Contacting Surfaces in Moist Conditions. Tribol Lett 41, 283–294 (2011). https://doi.org/10.1007/s11249-010-9709-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-010-9709-y