
Abstract
Handling errors are often seen in professional rugby games and even more so in amateur rugby. This paper analyses the problem of ball mishandling using high-speed video footage of passes and a bespoke finger friction rig. The high-speed video analysis showed that when the ball is caught, often there is a fluctuating movement of the fingers over the surface of the ball. It also showed that the fingers move over the surface of the ball when the ball is thrown, confirming that the dynamic friction is a good measure of how easily a ball can be handled. Rugby ball surface samples were used, on a finger friction rig, to assess the coefficient of friction between the finger and the balls. The currently manufactured balls displaying the highest coefficients of friction in clean, dry conditions were the design with square, ‘sharp’ pimples and also the design with a mixture of small and large pimples. The most consistent ball across wet and dry conditions was the ball with round, large, densely populated pimples. It was also shown that when water is added to the surface of the ball or finger, there was little variation in performance between the ball varieties.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The International Rugby Board rules specify the ball’s size and weight along with material. However, the material specifications are very broad. These rules state that ‘The ball should be manufactured from leather or suitable synthetic material. It may be treated to make it water resistant and easier to grip’ [6]. Hence, there are many different balls on the market, made by numerous manufacturers, from a range of material grades and with different surface patterns.
Since rugby is played more or less throughout the year, the ball needs to perform in a number of different weather conditions, which can all affect the handling of the ball. There are three main changes to consider under different weather conditions; the moisture level of the contact, the temperature and the nature of and amount of any interlayer material, e.g. soil. There is currently no other work found in the literature which has reported the changes these factors have on the grip of the rugby ball.
There has, however, been work to examine the contact of the finger with rigid surfaces, such as steel (Tomlinson et al. [10] explains this in more detail). It is acknowledged that there are two main mechanisms of friction when the finger contacts a surface. These are adhesion and hysteresis. Adhesion is where bonds form between asperities of the finger and contacting surface, the friction force is then the force required to shear the junctions of the contacting asperities. Hysteresis refers to the energy that is dissipated due to the deformation of the finger. This dissipation of energy means that a larger force is required to move the finger: i.e. an increased frictional force.
There is a larger understanding about the behaviour of rubber, in comparison to the finger, in contact with materials such as steel. It is known that at increased temperatures, when other variables such as velocity and normal force are controlled, the coefficient of friction of rubber increases [9]. This is because there is increased compliance of elastomers at higher temperatures, which is dependent upon the individual elastomer (the effects of temperature on the behaviour of rubber are discussed further in Mark et al. [8]). This increase in compliance means that there is a larger contact area, therefore increasing the friction force. The effect of contaminants such as dirt, mud and sand, seen in a game of rugby is unknown. However, work has been carried out on the effect of moisture in a finger–object contact. Dinç et al. [4] did not directly test sweat, but humidity, however they related the observations seen to the situation of a sweating hand. Their tests were carried out on non-textured surfaces (however with varying roughness) of plexiglass, nylon and phenolic resins, in 35–38% humidity and 90% humidity. Their results displayed an increase in frictional force with humidity. Bobjer et al. [2] investigated, more directly, the effects of simulated sweat on both textured and non-textured polycarbonate. They did this by dipping the finger in 5 mm of a 0.3% NaCl in H2O solution, prior to the tests, and using four different ridge patterns and one texture-free polycarbonate surface for the test. Their results indicated that simulated sweat increased the coefficient of friction (at 1, 10 and 20 N) for textured surfaces, but reduced it for non-textured surfaces. This difference is due to Bobjer et al. [2] applying more ‘sweat’ in the interaction than Dinç et al. [4]. A small amount of water on a smooth surface modifies the adhesion mechanism. Liquid bridges are formed, and as a result viscous shearing occurs, which increases the frictional force [4]. This then reaches a limit where the coefficient of friction starts to decrease, because the water starts to separate the finger from the contacting surface, making it easier to move.
The surface of the rugby ball consists of a number of pimples. The aim of the pimples is to ease gripping of the ball, especially when moisture and contaminants, e.g. mud, sweat and sand, are present. Work carried out by Bobjer et al. [2], on polycarbonate, found that a surface with wide grooves and narrow ridges (1–2 mm pitch and a ridge and groove width of 0.5-1.5 mm) had higher frictional properties with contaminants (sweat, oil and lard) than under normal conditions. It is difficult to extrapolate these findings to the surface of a rugby ball, due to the significantly different surface profile. However, these results could lead to the prediction that small, sharp pimples, widely spaced have a better gripping performance when contaminants are present than when completely clean.
There are many ways in which the hands contact the ball in a game. This can be in the form of passing the ball, catching the ball, from hand kicks or running with the ball. This study concentrated on passing and catching the ball. The lateral pass is the most basic of passes and forms the fundamentals of many situations, for example, pass off the floor and pass out of a tackle. To make a lateral pass over larger distances the ball is generally spun about its long axis, travelling point first. This is known as a spin pass. The spin pass will be used in this study as it is frequently used during a game.
The testing procedure consisted of three experiments, with the aim of determining the different mechanisms for catching and throwing the ball; analysis of ball performance in a game and comparison of ball performance in more controlled conditions.
2 Test methods
The rugby ball surfaces used in this study were chosen to represent a range of different balls. These surfaces are shown in Fig. 1.

Rugby ball surfaces used in testing. Mppm2 refers to millions of pimples per m2
One surface used in the tests, not pictured in Fig. 1, is a smooth rugby ball with no pimples, this Smooth Ball is not in production, but has been used in these tests to provide a base comparison. The surfaces of Balls 1 and 2 both consist of round pimples, however the pimples of Ball 1 are much larger and more densely populated (approximate spacing of pimples is 0.2–0.7 mm for Ball 1 and 0.5–2.2 mm for Ball 2). The pimples of Ball 3 are of a similar size and distribution to that of Ball 2 (approximate spacing of 1.1–2.6 mm), but they are square-based pyramids and hence more angular. The final surface, Ball 4, is a mixture of large (≈40%) and small (≈60%), square/cross shaped pimples. The distribution of the pimples is fairly random, but the small pimples do seem to intersperse the larger pimples (approximate spacing of 0.9–3.5 mm between large pimples, 0.3–2.0 mm between small pimples and 0.1–1.1 mm between large and small pimples).
A series of tests were performed on these five surfaces. These were initially friction tests. However, the rig (explained later) is not fully representative of a ball in a game of rugby. This is because the laboratory environment is different to that of a game; the forces that would be involved in catching a ball are not known and are likely to be too great to apply in this particular test; and finally the material is attached to a rigid surface, so there is less deformation of the material. To support the findings of the laboratory friction tests, in-field friction tests, accuracy tests and high-speed video filming were carried out.
2.1 Method for friction tests
A bespoke finger friction rig (Fig. 2) was used for the friction tests. The rig consists of two Vishay Tedea–Huntleigh Model 614 50 kg rated load cells. These load cells were chosen because the S-shaped nature of the design means that the upper plate can be supported solely on one load cell, allowing the applied load to be directly measured. Fifty kilogram load is the maximum rating for this design, which is high for the forces measured. However, with the right data acquisition set up it is capable of measuring increments of 0.2 N, which is thought to be sufficient for this application. As stated, one load cell is fixed under the top plate, to measure the normal force, and one is attached horizontally to the top plate, to measure the friction force. The load cells are accurate for a force applied along either their upper or lower face, but not for off-centre loading. Therefore, all friction tests were conducted linearly along the centre of the top plate, for the length of the load cell. The load cells can be used in either compression or tension.

Finger friction rig
The surface to be tested is attached to the top plate. This plate is rigid, since the whole rig is constructed from steel. The surface is attached using double-sided adhesive tape and a clamp at either end of the material. The adhesive tape is used to stop the elastomer from buckling and the clamps are used for extra support, to minimise any slipping of the material on the top plate.
The operation of the rig was confirmed through tests using rigid materials, and a weighted pulley system, which were then repeated on an existing, calibrated rig. The process for the friction tests was also trialled. Due to the residue that can be left on the balls from the manufacturing process, all balls and surfaces were washed with washing up liquid and water prior to use. The friction tests involve using the same area of the surface repeatedly and so the consistency of the test results was assessed. This showed that Balls 1–4 should be used for between 30 and 70 runs, and the Smooth Ball for between 20 and 40 runs. This was incorporated into the test method, to make sure that surfaces were not over used. The surfaces were also pre-used; that is the finger was run over the new material 20–30 times prior to testing. Tests were also carried out to determine which finger to use in the tests. It was shown that the middle finger of the writing hand was able to most consistently apply the same normal force, and therefore gave the most repeatable results.
The laboratory tests were performed in a room, which is affected by outdoor conditions. The temperature and humidity in the room vary from 19 to 24.5°C and from 38 to 58%, respectively. Ten participants were tested (one female and nine males, aged 19–22), against all five ball surfaces. The test procedure was approved by the relevant institutional ethics committee. Volunteers were asked to wash their hands with soap in warm (not hot) water, they then dried their hands thoroughly with a paper towel. The hands were then given 10 min to air dry. The test surfaces were cleaned with a solution of DEB Janitol degreaser and water, and rinsed with water, between tests and allowed to dry. Each test was repeated three times per person. The surfaces were tested in a different order for each person, to average out any unwanted effects due to placing in the test sequence. For tests involving water, dry materials were always used and then the water applied.
To take a friction measurement, the participant was asked to move the middle finger of their writing hand along the test surface, in a direction towards their body. A force of 12 N was applied in these tests. The participants were given time to practise before the tests, to achieve this force, and they could see the normal force output on a screen. Load consistency was achieved to within ±2.5 N. The velocity at which they moved their finger was controlled by asking the participants to count slowly to five from the start to the finish of the slide. This equated to a speed of 14 ± 6 mm s−1. The voltage change collected from the load cell was multiplied by a calibration factor, to calculate the force applied to the load cell. Each individual data point of friction force is then divided by the corresponding normal force data point (sampling frequency 5,000 Hz), the average of these is then taken as the coefficient of friction. This method is used to average out any error in the signals.
There were three levels of water applied to the finger; case A was a sponge wet finger, more water was applied in case B by adding water with a towel and in case C the finger was fully immersed in water. Case A will most closely relate to the high humidity tests used by Dinç et al. [4] and case C will be most closely related to the simulated sweat tests carried out by Bobjer et al. [2]. In the next set of tests water was added to the material. In case I, one spray of water was added to the material, in case II, three sprays of water were added to the material and in case III, three sprays of water were added to the material and the finger was fully immersed in water before the test.
Friction tests were also performed in-field, alongside accuracy tests (described later), after substitutions in a university game of rugby. These tested the friction between the middle finger of 16 participants (male, aged 18–22), and four different surface–water combinations. The Smooth Ball and Ball 1 were tested wet (three sprays of water), and Balls 1 and 3 were tested dry. The same test procedure as in the laboratory tests was followed, however volunteers were not asked to clean their hands prior to the test. The environmental conditions for these tests were a temperature of 10°C and relative humidity of 78%.
2.2 Method for accuracy pass tests
Accuracy tests were conducted along side the in-field friction tests. A target was set up on the side of the training hut, next to the pitch, at a distance of 10 m away from the player. The target was a circle 100 mm in radius, and split into three equally spaced inner circles, shown in Fig. 3. Each section was scored relative to the distance away from the centre of the target, with a hit in the centre scoring 8 points down to a complete miss scoring 0 points. On the day, the temperature was 10°C, pressure was 1,017 mb, relative humidity was 78%, there was no precipitation and the wind was blustery. The balls used in this test corresponded to the surfaces tested in the in-field friction tests, i.e. Ball 1 wet and dry, the Smooth Ball wet and Ball 3 dry; only one of each ball/condition were used in the tests. The balls were pressurised to a value recommended by the manufacturer (10 psi), this was checked half way through the test, and had not decreased. The water was added to the wet balls by completely immersing them in a bucket of water and shaking the excess off, this ball was then handed to the player. There was a separate wet and dry Ball 1 to help prevent water addition to the dry ball. The players also wiped excess water from their hands after the wet tests. The balls were given to the players in rotation to counteract the effects of learning or change in condition from previous tests. Each ball was tested three times. Before the tests, the players were allowed a few practise shots with a dry control ball.

Target used in accuracy tests
2.3 Method for high-speed video filming
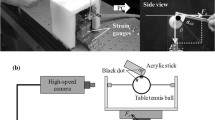
To support and understand the findings from the friction and accuracy tests, high-speed video filming was used. These were carried out in two separate sessions, with all filming being done indoors. Six university rugby players, aged 21–23, who train and play rugby regularly in the field positions of prop, second row, back row, fly half and centre, were asked to throw and catch the ball with good aim, over a distance of 10 m. The balls used in this test were the same balls as the in-field friction and accuracy tests; Ball 1 wet and dry, Ball 3 dry and the Smooth Ball wet. Again, one ball/condition was used (i.e. 1 × Ball 1 wet, 1 × Ball 1 dry, 1 × Smooth Ball wet and 1 × Ball 3 dry), these were the same balls as used in the previous tests, for consistency. The balls were inflated to the manufacturer’s recommended pressure (10 psi). Each ball was thrown five times by each player, in a rotated order. The speed of pass was not specified to them. High-speed video recordings (Phantom v4.2) were then used to examine both the passes and catches. The cameras were set up to record the catch, throw and trajectory (filming at 200 frames per second). The recordings were saved as bitmap images and then analysed using a MATLAB®-based tracking program, developed in-house.
3 Results
3.1 Friction tests
The moisture tests carried out in the laboratory showed that when water was applied to the finger, Fig. 4, the quantity of water influenced the change in the coefficient of friction. Adding a small amount of water to the finger decreased the coefficient of friction, however adding a little more water increased the coefficient of friction to a value above that measured for the dry test. Adding further water resulted in the coefficient of friction reducing once again. When ANOVA Tukey post hoc analysis was carried out on these data it was found that the changes were not all statistically different (p < 0.05). The statistical differences can be seen on Fig. 4, where the 95% confidence interval bars do not overlap (e.g. Ball 2 test B and C). Although the differences are not all at p < 0.05 level, the changes in mean and comparisons between groups of all balls show recognisable trends. There are large confidence intervals shown, because the properties of the finger vary extensively from person to person.

Coefficients of friction when fingers were wet
Figure 5 shows the moisture tests where water was applied to the ball surfaces. These tests show that there is little difference between the three wet conditions. The Smooth Ball, Ball 3 and Ball 4 showed a decrease in coefficient of friction when water was added to the ball, however no large difference was seen between the dry and wet conditions for Balls 1 and 2.

Coefficients of friction when rugby material was wet
Figures 4 and 5 also show a comparison of the five balls in dry conditions. ANOVA post hoc Tukey analysis was again carried out on these data and the cases of p < 0.05 can be seen by the non-overlapping 95% confidence interval bars. These show that Ball 1 and Ball 2 are not statistically different, nor are the Smooth Ball, Ball 3 and Ball 4. The coefficients of friction of Balls Smooth, 3 and 4 are statistically higher than the coefficients of friction of Balls 1 and 2.
3.2 In-field friction and accuracy tests
These tests indicated that the coefficient of friction (see Fig. 6) of the two dry balls was greater than that of the two wet balls. The error in the accuracy target test is quite large, due to the very nature of the test, in that it is dependent upon player ability as well as ball properties. It therefore cannot be conclusively said that there is a relationship of increasing accuracy with greater coefficients of friction. The mean coefficient of friction values with 95% confidence bars and the mean scores from the accuracy tests are shown in Fig. 6.

Coefficients of friction and mean target scores
3.3 High-speed video filming
There was one main type of catch, with a further one seen only once. In the main catch type the top of the palm (part adjoining the fingers) was the first point of contact with the ball. This contact with the palm slows the ball down and then the fingers waver over the top of the ball until choosing a fixed position to clamp down and secure the ball. Figure 7 shows the change in position of the fingers, from first contact with the ball until the ball is secured. The time for the player to secure the ball from first contact was 41.5 ± 1.5 ms.

Different stages of the ‘finger wiggle’ on the ball
The second type of catch, seen only once, was where the fingertips contacted the ball first. The ball then seemed to slow down smoothly until the palm was in contact with the ball, unlike the more sudden deceleration with the main catching mechanism. Once in contact with the palm the ball was then secured in the hands of the player. There are no contacting and de-contacting movements of the fingers visible in this case.
To throw a ball, the right hand (of a right handed player) grips the ball with all five digits, and the left hand is simply used as support. In the process of providing spin to the ball, the fingers leave contact with the ball surface, one after another. Starting firstly with the thumb and finishing finally with the little finger; the images in Fig. 8 illustrate this process. The average speed at which the ball was thrown was 10.7 m s−1 (±1.8 m s−1) and the average spin rate was 148 rpm (±23 rpm). The slight variation of this from the values measured by Holmes et al. [5], is thought to be due to the different playing standards of the volunteers tested, between the two studies.

Application of spin to the ball
The spin players were able to apply to each ball is shown in Fig. 9. This figure shows that players are able to apply less spin to the Smooth Ball wet compared to the other three balls tested. There was no significant difference between the spin applied to Ball 1 wet and Ball 1 dry. The spin applied to Ball 3 is also not statistically different to that applied to Ball 1 wet and dry.

Average spin applied to balls, displaying 1 SE
4 Discussion
4.1 Mechanism for catching a ball
It is known that to lift an object, the frictional properties of the finger–surface contact are perceived using receptors in the fingertips, this information is then fed to the brain [7]. The information is then used to alter the normal force for both the tangential force and the frictional properties of the grip, by the use of controlled frictional slips [3]. This total force is then distributed between the digits in a way that reduces the overall normal force, to ensure that the ratio between normal force and load is similar across all digits [3]. The greater the frictional interaction between the surface and the finger, the lower the normal force that the digits are required to apply, to secure the object [3].
There will be a similar process to this taking place when a ball is caught, however it may be more complex due to the fact that the ball is moving. The loads on the ball were not monitored and from the video it is not possible to quantify the deformation of the ball when contacting the hand, therefore it is not possible to fully characterise the process from these tests alone. The finger movements may be part of the surface perception process, or they may just be an involuntary act. Further experiments could determine this. These experiments would have to monitor the normal force applied by each digit, throughout the process. If the normal forces applied by the digits are known, the exact time to fully secure the ball will also be known, and it can be seen whether the force profile suggests the finger movements are part of the perception process, or an involuntary action.
The movement of the fingers over the ball, before securing it, highlight that the dynamic friction behaviour is relevant to describe how easy a ball is to catch. The fingers are also seen to move over the surface of the ball when it is thrown, indicating that again the dynamic friction behaviour is a useful measure of how easily a ball can be handled.
4.2 Handling a ball with dry hands
The ball with the highest measured coefficient of friction, in dry conditions was the Smooth Ball (although not at a difference level of p < 0.05 from all balls) (Figs. 4 and 5). This is due to the pimple-free surface providing a larger area of contact for the finger, i.e. the case of the fingers not deforming around the asperities and contacting the ‘land’ between them. An increase in area of contact means that more asperity junctions can locally ‘weld’ together, increasing the force required to shear them, i.e. the friction force.
Of the balls in current production (i.e. Balls 1–4), in dry conditions, Balls 3 and 4 had the higher coefficients of friction. Ball 3 has a similar pattern of pimples to that of Ball 2, however the pimples on Ball 3 are square-based pyramids compared to the round ones of Ball 2. The significantly increased coefficient of friction for Ball 3 compared to Ball 2, implies that more angular pimples are a much more effective shape for increased friction. This could be because the ‘sharpness’ of the pimples causes an increase in local stresses increasing contact area and the hysteresis mechanism. Although both the rubber and the finger are viscoelastic materials, it is thought that the finger will deform around the pimples. This is because, although the Young’s modulus can be variable, a comparison of two stated values of each show that skin has a Young’s modulus 102 times smaller than that of the rugby ball material. The rubber is quoted from the manufacturer as having a Young’s modulus of 10 MPa and the Young’s modulus of the skin on the forearm, for young adults is 0.42 MPa [1]. This increase in friction with ‘sharp’ pimples agrees with the work that Bobjer et al. [2] carried out on polycarbonate, where they found that thin, widely spaced ridges had an increased coefficient of friction compared to the larger, more closely spaced ridges.
This however is different to that observed for Ball 4. This ball has a mixture of large and small pimples, which are, in comparison, closely spaced. Further study is required to investigate the underlying mechanism, which causes this material to have such a high coefficient of friction. This could arise from a combination of modifications to the adhesive and hysteresis friction mechanisms. This is because as the finger is deforming on a large pimple (designs such as Balls 2 and 3), the finger would contact some of the flat surface in between the pimples. However, in Ball 4 the finger contacts yet another (smaller) pimple, to undergo further deformation. This hypothesis would require the actual contact area between the different pimple patterns and the finger to be determined taking into account deformation under the measured normal forces.
Balls 1 and 2 performed the least well in the dry conditions. This is surprising, since the two surfaces are very different in pimple number density. They do however both have round pimples, which suggests a large influence of pimple shape in determining the friction between the finger and textured surface. The coefficient of friction values would be consistent with the higher aspect ratio of the pimples for the surface of Ball 2 giving greater finger deformation so that a large area of the ‘land’ between the pimples is contacted. The increased deformation and contact area would offset the greater number of pimples present on the surface of Ball 1. Again, further studies need to be carried out to investigate this further and confirm or deny this theory.
4.3 Handling the ball with a small amount of moisture on the fingers
For all balls, except Ball 1, there is a decrease in coefficient of friction compared to the dry tests, with the addition of a small amount of water (Fig. 4). This seems to disagree with the previous work of Dinç et al. [4] and Bobjer et al. [2]. However, Dinç et al. [4] states that there is a critical lubricant thickness for the coefficient of friction to increase with moisture. This partly explains why case A (sponge wet finger) is lower than case B (towel wet finger), however it does not explain why case A is lower and not equal to or greater than the dry conditions. There could be several possible reasons for this, all of which would need further research. The tests were taken on different days, so the humidity could have affected the tests, if the humidity on the dry test day was higher than that on the damp finger test days, there would be a higher than expected dry coefficient of friction (humidity range in the laboratory is 38–58%). The effect may also be temperature related. This was investigated using Digitron Infrared Non-Contact Thermometer to measure the temperature of the surface immediately after testing, however this did not provide enough accuracy to see a difference between tests. Therefore, the test would need to be repeated using a method such as a thermal camera or embedded thermocouples to better characterise the temperature change during each test.
In case B (towel wet finger), where slightly more water was added to the finger, an increase in coefficient of friction was observed (for all balls except Ball 1). This is similar to that observed in the work of Dinç et al. [4]; the increase of coefficient of friction with moisture is due to liquid bridging, which increases the friction force due to the presence of viscous shear forces.
For Ball 1, there may be a trend of increased coefficient of friction with a small amount of water (case B), however this is not confirmed as it is not statistically significant. This ball is unique in comparison to the other balls because it performs consistently across all the levels of water added to the finger. This ball has much wider, shorter and more densely populated pimples than the other balls. These results could therefore indicate that a close network of pimples increases consistency in the performance of the ball, however further studies need to be carried out to confirm this.
4.4 Handling a ball with wet fingers
In all instances, except for Ball 1, the coefficient of friction was reduced compared to the dry condition and towel wet finger (case B), when the finger was fully immersed in water (case C). The coefficient of friction is low because the water is at such a level that it separates the finger from the surface of the ball. This makes it easier for the finger to slide on the surface reducing the frictional force. The measured coefficient of friction in the wet finger case was not statistically different between balls, nor was it for the other wet finger cases. The results from the wet friction tests performed in the laboratory agree well with the in-field friction tests. The similarity of these results in the different environments indicates that the water dominates the interaction. Therefore, at a certain level of moisture on the fingers, friction between the finger and ball is almost independent of the environmental or ball conditions.
4.5 Handling a wet ball
There was no trend of increasing and then decreasing coefficient of friction seen in the wet material tests because one spray of water was already enough water to start to separate the surfaces of the finger and ball. The level of water, in these tests, is at such a level that it dominates the interaction; showing little difference between the three balls. The water dominates the interaction because it separates the two surfaces; this causes the underlying surface to be less influential in the interaction.
The dry coefficient of friction is higher than the wet conditions for the balls, except Balls 1 and 2. The surface pattern of these balls is different, in that Ball 1 has much wider, more closely spaced pimples than Ball 2. However, in each case the pimples are round. This lack of change with water addition to the ball could be a shape factor, as seen in the dry conditions. Again this factor needs to be investigated further, using a larger population of surface textures, before it can be confirmed. For surfaces where a decrease in friction was observed, the water is separating the finger from the underlying surface enabling the finger to move more easily, i.e. reducing the frictional force.
4.6 Handling a ball in a game, compared to in the laboratory
In wet ball conditions the in-field friction tests, laboratory friction tests and target tests were all in agreement. The friction tests measured the same coefficient of friction, and highlighted no difference between the Smooth Ball and Ball 1 wet. The target tests also showed no difference between the two balls. However, the high-speed video images did highlight a difference between the Smooth Ball wet and Ball 1 wet. Players were able to apply more spin to Ball 1 wet than to the Smooth Ball wet. Application of more spin to a ball would generally imply better accuracy. However, the two balls performed equally well in the accuracy and friction tests, although the reason for this difference is not known. It could be related to the perception the participants have of how easily the ball can be handled. This hypothesis can be investigated using an in-depth perception study.
The dry in-field friction test results measured a higher average coefficient of friction than the laboratory tests. There was also no significant difference between the Smooth Ball dry and Ball 1 dry in the in-field tests, which is contrary to the laboratory test results. The reason for this is the difference in the environmental conditions. The humidity was greater for the in-field tests, the temperature was lower and the players were in-game condition, i.e. their hands were not clean. The laboratory tests suggest that the increased humidity would increase the friction force for the Smooth Ball, but would make little difference for Ball 1. Generally, a lower temperature would be expected to reduce compliance of a viscoelastic material and therefore a decrease in the frictional force would be expected. These factors indicate that the mud on the hands of the players increased the coefficient of friction. The mud from the field was not analysed, and so the composition is not known. This observation however highlights the need for contaminants such as mud to be included in future friction measurements on rugby ball surfaces.
5 Conclusions
The recorded catches showed the fingers moving over the top of the ball before it is fully secured. Further work needs to be done to investigate if this is part of the perception process or is involuntary.
The balls with the highest measured coefficient of friction were the ones with square-based pyramidal pimples and a mixture of pimple sizes. The results suggest, however not conclusively, that square pimples are more effective than round pimples for high friction. The pimple shape and a mixture of pimple sizes, is an area for future research.
The ball which showed the best consistency in friction tests across dry and wet conditions was the ball with wider, rounded, closely spaced pimples. However, the addition of large amounts of water to the hand or ball surface reduces the variability of the measured friction between the individual balls.
There was an increase in measured friction for the in-field tests when contaminants such as mud were on the fingers suggesting the requirement for future tests involving contaminants such as soil and sand.
References
Agache PG, Monneur C, Leveque JL, Rigal JD (1980) Mechanical properties and young’s modulus of human skin in vivo. Arch Dermatol Res 269:221–232
Bobjer O, Johansson S-E, Piguet S (1993) Friction between hand and handle. Effects of oil and lard on textured and non-textured surfaces; perception of discomfort. Appl Ergon 24:190–202
Burstedt MKO, Flanagan JR, Johansson RS (1999) Control of grasp stability in humans under different frictional conditions during multidigit manipulation. J Neurophysiol 82:2393–2405
Dinç OS, Ettles CM, Calabrese SJ, Scarton HA (1991) Some parameters affecting tactile friction. Trans ASME J Tribol 113:512–517
Holmes C, Jones R, Harland A, Petzing J (2006) Ball launch characteristics for elite rugby union players. The engineering of sport 6, vol 1. Springer, New York, pp 211–216
Board InternationalRugby (2006) Law 2 the ball, playing charter. International Rugby board, Dublin
Johansson RS, Westling G (1987) Signals in tactile afferents from the fingers eliciting adaptive motor responses during precision grip. Exp Brain Res 66:141–154
Mark JE, Erman B, Eirich FR (1994) Science and technology of rubber, 2nd edn. Academic, London
Schallamach A (1953) The velocity and temperature dependence of rubber friction. Proc Phys Soc B 66:386–392
Tomlinson SE, Lewis R, Carré MJ (2007) Review of the frictional properties of the finger–object contact when gripping. Proc Inst Mech Eng J J Eng Tribol 221:841–850
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tomlinson, S.E., Lewis, R., Ball, S. et al. Understanding the effect of finger–ball friction on the handling performance of rugby balls. Sports Eng 11, 109–118 (2009). https://doi.org/10.1007/s12283-009-0014-7
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12283-009-0014-7