
Abstract
The gliding comfort and performance of personal care and wellness products is strongly influenced by the sliding friction behaviour of human skin. In the open literature, most of the results on skin friction are related to the performance of cosmetic products or to the slip and grip properties of surfaces. Experiments were usually carried out on the forearm or the fingertips. The influence of the surface roughness and the material of engineering surfaces have received little attention so far, especially not in sliding contact with the skin of the cheek, or under different climate conditions. A custom-built rotating ring device was used to study the influence of the probe surface roughness (R a = 0.1–10 μm), the probe material (metals, plastics), the climate conditions (21–29 °C, 37–92% RH) and skin hydration on the frictional behaviour of the skin on the cheek and the forearm. The amplitude of the surface roughness has a dominant influence on the friction behaviour: the smoother the surface, the higher the friction. Differences can be as large as a factor 5–10, especially in the range R a < 1 μm. The probe material itself has no significant influence; except for PFTE which reduces the friction by approximately 25% compared to the other materials. In a humid climate, the skin becomes hydrated and the friction is twice as high as in a dry climate. The effect of skin hydration is smaller on the cheek than on the forearm, probably due to the presence of beard stubbles. A simple friction model for human skin is presented, based on adhesion friction, contact mechanics of rough surfaces and the interfacial shear stress of thin organic films. The model explains the effects of the probe surface roughness and skin compliance. Quantitative application of the model indicates that the biomechanical indentation and shearing behaviour of the stratum corneum is influenced by the same physical process, i.e. the intercellular bonding strength of the corneocytes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The gliding comfort and performance of personal care and wellness products is strongly influenced by the sliding friction behaviour of human skin. In many cases, the aim is to design easy gliding products with low friction and minimum skin deformation, because this enhances the perceived skin comfort and reduces skin irritation. In other cases, it is desired to achieve optimum grip properties, which is related to static friction behaviour and different skin deformation characteristics. For the design of products, it is important to be able to control the skin friction via the surface design. The scope of this article is the influence of the surface roughness and material (metallic and polymeric materials). These parameters have received little attention in the open literature so far, especially not in a product development and engineering context.
Besides the surface design of the product, the condition of the skin is an important factor to consider. In practical situations, product users commonly experience that the skin becomes sticky after showering or during a stay in a humid climate. On the other hand, the skin often feels “silky” if the environment is dry, for example during winter in northern Europe or in a cool and air-conditioned hotel room. In this article, we will study how the skin friction can be influenced by the surface design in both a dry and a humid environment.
1.1 Effect of Surface Roughness
Much of the earlier study addressing the influence of the surface roughness on the friction of human skin is aimed at the grip properties, or touch and feel aspects of engineering surfaces. These studies focus on the skin of the fingertip and the palmar skin of the hand, which have a relatively thick stratum corneum compared to other body parts. Another unique property of this type of skin is the friction ridges. These properties make the skin on the fingertip and hand rather different to the skin on other parts of the body; it is not straightforward to compare the results of skin experiments.
A thorough review into the subject of tactile friction is provided by Tomlinson et al. [1]. The general trend emerging from this work is that the friction coefficient between a hard surface and the skin of the fingertip or hand decreases with an increasing surface roughness [2–5]. In these papers, the reported surface roughness values varied in the range R a = 0.03–45 μm. In the case of very rough surfaces, up to R a = 90 μm, the friction coefficient increases with an increasing surface roughness, an effect that has been attributed to the interaction with the friction ridges and ploughing [6, 7]. An exception is the result of Gee et al. [8], who found no correlation with the surface roughness.
The only reference to the effect of the surface roughness on a body part other than the fingertip or the hand is made by El-Shimi [9], who reports that a smooth probe gives higher friction on the skin of the forearm than a rough probe. Unfortunately, the surface roughness values were not reported.
1.2 Effect of Skin Condition
In the cosmetics industry, it is common to measure skin friction on the ventral forearm to characterize the effect of cosmetic skin moisturizing products or to give a measure of the skin’s health [10–13]. In general, the effect of moisturizing products is that they increase the skin friction [13–17]. In these studies, there is often also a correlation observed between the skin friction and the electrical properties of the skin, characterized by the skin capacitance, conduction or impedance, which give an indication of the degree of hydration of the stratum corneum [11, 12, 14, 18–22]. Also in the case of human skin sliding against textiles, the friction increases with hydration [23]. Another important observation is that the environmental temperature and relative humidity influence the hydration state of the stratum corneum and that the friction behaviour can be different [19, 24].
Most studies which address this topic have been carried out at the ventral forearm using either reciprocating sliders or rotating ring devices. The most commonly observed phenomenon is that the friction coefficient increases very shortly after water has been applied to dry skin, and slowly returns to its original value after 20–30 min of drying [17, 19, 25–36]. If the friction coefficient is monitored continuously during the drying process, some researchers observe a peak in the friction coefficient when there is no free water left on the skin surface but when the skin is still in a “damp” state. Dinc et al. [5] reported that the friction coefficient between fingertips and plexiglass increased with ca. 20–30% if the relative humidity was increased from 35 to 90%.
If the environment is controlled and the skin hydration condition is measured, it is at least possible to reduce the variation in results between different subjects, and to explain a large part of the person-to-person variation in skin friction.
1.3 Effect of Material
From reviewing the existing literature it is not possible to conclude whether or not the friction probe material has a significant influence on skin friction. This is because of the large variation in results due to differences in test methods, probe geometries, loading conditions, skin treatments, surface finishing and, last but not least, person-to-person variations and differences in the environmental conditions. To investigate the influence of material, different materials should be tested in the same experiment under identical conditions. Comaish and Bottoms [26] found differences in friction among steel, nylon, teflon and polyethylene and in vitro skin taken from human cadavers. Unfortunately, Comaish did not report on the manufacturing or surface finish of the samples and therefore potential material effects may be masked by surface roughness effects. From other work [5, 26, 37], it seems that teflon (PTFE) exhibits lower friction compared to any other dry sliding material.
The objective of our experiment was to study two important design parameters that have so far not been investigated in great detail by other researchers, namely the surface roughness and the material. A large variation in surface roughness amplitudes were applied using different surface finishing techniques. Attention was also paid to the skewness and kurtosis parameters of the surface roughness. Secondly, different engineering plastics and metals were used in the same experiment to look for possible influences of the material. Another important aspect investigated—which has not been published previously—was the friction behaviour of the hairy skin on the cheek. The cheek contains beard stubbles that may influence the friction behaviour. Finally, the influence of different environmental conditions and skin hydration were studied. To avoid interaction between adhesion and ploughing friction mechanisms, and to prevent stick–slip, a rotating ring-type apparatus was employed. Different hypotheses are considered to explain the friction of hydrated skin.
2 Experimental
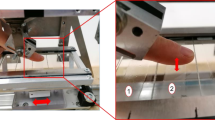
Skin friction experiments were carried out using a rotating ring-type measurement apparatus. This apparatus was custom-built with the aim of measuring friction on different body parts, without the need for manoeuvering the test subject in difficult positions (see Fig. 1). This was achieved by loading the ring with a linear elastic spring in combination with a gravity compensating mass, see the schematic in Fig. 2. This construction enables the application of a constant normal load on the probe head, independently of the position of the device. By adjusting the elongation of the spring, the normal load on the probe head can be varied between 1 and 5 N. Furthermore, the rotating ring is surrounded by different support rings to control the normal and lateral deformation of the skin in such a way that the contact pressure and shear stress on the ring is well defined and evenly distributed. Then normal force on the ring is proportional to the normal force on the probe head, F n,ring = (A ring/A head)F n,head. The ring is driven by a DC motor with an integrated torque transducer which directly measures the friction torque T f between the rotating ring and the skin. The friction coefficient is determined from the measured friction torque, μ = T f/F n,ring r. The rotational speed of the ring can be varied between 0.01 and 10 rev/s, corresponding to circumferential speeds of the outer radius of the ring of between v = 0.5 and 500 mm/s. The different ring materials including the surface finishing methods and the values of the surface roughness parameters R a, S k and K t are listed in Table 1. In the current experiments, the normal load on the probe head was set at 2 N which results in F n,ring = 0.625 N and p = 104 Pa. The circumferential speed was set at v = 100 mm/s.

Custom-built rotating ring apparatus and application to the skin of the forearm and the cheek. The inner and outer diameter of the rotating ring (indicated with an arrow) is, respectively, 8 and 12 mm

Schematic of the rotating ring apparatus showing the measurement principle
In order to be able to compensate for small (involuntary) movements of the head or arm, the probe was pressed to the skin by the test subject itself. This is more difficult when the probe is handled by an operator. Three repeat measurements were taken, each within the same area but without overlapping the test location of the previous measurement. Between each test subject the friction tester was cleaned with ethanol to remove skin debris, sebum, sweat and other contaminants.
2.1 Influence of the Measurement Time
When the rotating ring was applied to the skin the friction torque evolved over time in a characteristic way. Basically, three stages could be distinguished (see Fig. 3). In the first stage (A–B), the friction torque increased rapidly. It is plausible that in this stage the skin was adhering to the ring at first contact (A) and subsequently accommodated to the imposed friction force by lateral elastic strains. When the friction torque was balanced by the stresses in the skin, the onset of gliding started at (B). In the next stage (B–C), the friction torque increased slowly. This slow increase continued for 0–60 s, depending on the friction conditions. Under conditions of low friction, for example in a dry climate and with rough ring surfaces, the duration of stage B–C was typically shorter than 10 s. However, under conditions of high friction, the duration of stage B–C was found to be as long as 60 s and the friction torque was found to increase up to a value twice as high as the initial value at point B. The root cause of this phenomenon is probably related to friction-induced skin hydration which softens the skin and decreases its surface roughness. This was confirmed by hydration measurements just before and after the application of the rotating ring. The gradual removal of dead cells of the stratum corneum may also contribute to the increase in friction, for example by changing the surface roughness of the skin, by the formation of a transfer layer on the rotating ring, or by deteriorating the barrier function of the stratum corneum. Further investigations are required to determine the relative contributions of these mechanisms. Finally, the friction torque reached a stable value, referred to as stage (C–D) in Fig. 3.

Evolvement of the friction torque in time after application of the rotating ring to the skin; A → B, rapid increase; B → C, slow increase; C → D, stable friction torque. The time needed to achieve stable values depends on the friction
The time needed to achieve stable friction torque values was not known in advance; however, it was necessary to limit the measurement time to 30 s because in some cases with high friction the test became painful for the test subject and the skin became irritated. In most cases, the friction stabilized within 30 s. In a similar rotating ring experiment, Gerrard [30] achieved stable values after 10 s; only in some cases of high friction was the friction torque still increasing after 30 s in our experiments. As a consequence of the limited measurement time, the measured differences between the lowest and the highest friction values may be underestimated in some cases. Friction coefficients were determined by taking the average value of the friction torque over the last 10 s of data.
The age of the test subjects varied between 20 and 24 years. In the surface roughness experiment, two subjects participated: one Caucasian man and one black African. In the skin hydration experiment, ten subjects participated: nine Caucasian men and one Caucasian woman. The skin of the test subjects was prepared identically to reduce the person-to-person variation as much as possible. The subjects had followed their normal daily shaving routines but were instructed not to use creams or moisturizers on the day of the test. Approximately half an hour before the test, the subject’s forearm and face were prepared with a mild, non-degreasing soap and then dried with a non-lint towel. The cleaning procedure was followed by an acclimatization period of 20 min before commencing the friction tests. The subjects were seated during this time. The skin hydration was measured with a Corneometer® CM 825, in three locations on the forearm, and three locations below the ear for each friction ring. In preliminary investigations, it was determined that the skin site below the ear is the most constant and repeatable cheek location to carry out friction tests (see Fig. 1). A temperature and relative humidity-controlled room was used to simulate different climatic conditions. Humid climates were simulated with T = 28–29 °C and RH = 80–90%. Dry climates were simulated with T = 21–26 °C and RH = 36–37%. The exact conditions of each experiment are reported in Sect. 3. Significance tests were carried out using Minitab® software.
3 Results
The results of the first experiment—which was focused on the influence of the surface roughness—are shown in Fig. 4a, b. The results of the second experiment—which was focused on the influence of the skin hydration—are shown in Fig. 5a, b. The results of significance tests are shown in Table 2. The results with respect to the influence of the surface roughness, the climate and the material are summarized in the following sections. Although the number of test subjects was small in these experiments, respectively, N = 2 and 10 in the first and second experiment, the test set-up was sufficient to demonstrate significant and convincing results with respect to the influence of the surface roughness, material and climate.

a Friction coefficients as a function of the Ra surface roughness of the rings, measured on the forearm of two subjects. Humid climate: T = 29 °C, RH = 92%. Dry climate: T = 26 °C, RH = 37%. b Friction coefficients as a function of the Ra surface roughness of the rings, measured on the cheek of two subjects. Humid climate: T = 29 °C, RH = 92%. Dry climate: T = 26 °C, RH = 37%

a Friction coefficient as a function of the skin hydration, measured on the forearm of ten subjects. Humid climate: T = 28 °C, RH = 82%. Dry climate: T = 21 °C, RH = 38%. b Friction coefficient as a function of the skin hydration, measured on the cheek of ten subjects. Humid climate: T = 28 °C, RH = 82%. Dry climate: T = 21 °C, RH = 38%
3.1 Influence of the Surface Roughness
It is clear that the amplitude of the surface roughness, characterized by the R a value, has a large and significant influence on the friction coefficient (R 2 = 40%, p = 0.000). Note that in order to clearly visualize the increase in friction at small surface roughness values (R a < 1 μm) it was necessary to use a logarithmic scale for the horizontal axis. If a power law μ ~ R na is used to fit the experimental data, the friction coefficient decreases with the surface roughness with an average exponent n = −0.4. The skewness of the surface roughness has a weak negative correlation with the friction coefficient (R 2 = 14%). The kurtosis has a negligible correlation with the friction coefficient (R 2 = 5%). There was no significant difference in friction between the arm and the cheek in this first experiment.
3.2 Influence of the Climate Conditions
The second most important and significant parameter was the climate condition. In both experiments, the friction coefficient was significantly increased in the humid climate compared to the dry climate (respectively, R 2 = 13%, p = 0.000 in the first test, and R 2 = 24%, p = 0.000 in the second test). On average, the friction coefficient in the humid climate is a factor 2 higher compared to the dry climate. It was also observed that the variation in friction coefficient is much larger in the humid climate than in the dry climate. Obviously, the influence of the climate is related to the skin hydration (see Fig. 5a, b). Roughly, the skin hydration varies between 25 and 50 AU in the dry climate and between 50 and 75 AU in the humid climate.
Although in the second experiment there was no significant difference between the average friction coefficient of the arm and the cheek, the variation in friction with skin hydration was stronger on the forearm than on the cheek, compare Fig. 5a and b. This effect was significant (interaction between climate and body location: p = 0.000).
3.3 Influence of the Material
In the first experiment, where several hard plastics and metals were compared, no significant differences between the materials were observed. In the second experiment, the friction coefficients of PTFE and aluminium were compared. To exclude possible surface roughness effects, two aluminium rings were used: one with a slightly lower surface roughness than the PTFE ring, and one with a slightly higher surface roughness. In this case, there was a small but significant difference between PTFE and aluminium (R 2 = 5%, p = 0.045). The friction coefficient of the PTFE probe was on average 25% lower than with the aluminium probes.
4 Discussion
From previous study on friction of human skin, it appears that the dominant friction mechanism of dry skin is adhesion friction. For instance, the load and geometry dependency of the friction coefficient in reciprocating sliding experiments with smooth spherical indenters can be explained by a simple model of adhesion friction, based on the assumption that the real area of contact follows Hertzian behaviour [34, 38]. In the following discussion, the adhesion friction model will be maintained and it will be shown that it can also explain the influence of the climate and the surface roughness of rotating rings if the model is extended with the contact mechanics of rough surfaces. Friction mechanisms related to the deformation of human skin are not considered relevant here because of the following reasons. Firstly, viscoelastic hysteresis friction due to cyclic skin loading does not apply to the rotating ring experiment because there is no vertical skin displacement within the contact and the lateral skin displacement is constant. Secondly, viscoelastic hysteresis friction due to asperity interaction seems unlikely to be significant in our case because our observations contradict the existing theory. The theory of Moore [39] predicts that the friction of elastomers will increase with the surface roughness amplitude, whereas in our experiments the friction decreases with the surface roughness amplitude, up to R a < 10 μm. Considering the observations of Tomlinson et al. [6]—who observed an increase in friction with surface roughness amplitude—it seems that Moore’s theory may be applicable to skin friction with rough countersurfaces having R a > 10 μm and where interaction with skin papillary ridges (on the fingers, palm or feet) occurs.
4.1 Adhesion Friction Model for Human Skin
A good foundation of an adhesion friction model for human skin is the classic description of Bowden and Tabor:
where F f is the friction force, τ is the interfacial shear stress and A r is the real area of contact. It is valid to adapt this description because the nature of skin friction is interfacial shear in a thin organic surface layer. This layer consists of an emulsion of water, epidermal and sebaceous lipids, sweat and other contaminants [40–42]. There may also be a contribution of interfacial shear between the loosely attached dead cells (corneocytes) of the stratum corneum, similar to the action of dry lamellar lubricants like graphite or talc [43]. Besides Eq. 1, several other descriptions for the adhesion friction are given in the literature based on different physical mechanisms, for example the formation and breaking of intermolecular bonds [39]; Schallamach waves [44] or the work of adhesion [45]. However, the application of these alternative adhesion friction models to human skin is not clear in our case.
In order to apply Eq. 1 to the friction of human skin τ and A r need to be described in more detail. In earlier study [34, 38, 46], the real area of contact was assumed to be equal to the nominal contact area because the (spherical) indenter surfaces were very smooth. In the current case, the rotating ring probes are rough and therefore the real area of contact A r does not necessarily relate to the nominal contact area A 0. The influence of the surface roughness of the rings on the real area of contact must therefore be accounted for. A suitable expression for this purpose is a simplified version of the Greenwood and Williamson model, which describes the real area of contact between elastically deforming surfaces having spherically capped asperities with an exponentially distributed height distribution [47, 48]:
where F n is the normal force, E* is the equivalent elastic modulus:
σs is the composite standard deviation of the asperity summit height distribution:
and R* is the composite average asperity summit radius:
The index “p” refers to the probe; the parameters without index refer to the skin. In reality the skin behaves viscoelastic but for the purpose of this discussion it is sufficient to consider linear elastic behaviour. Equation 2 is simplified if it is assumed that the skin roughness is flattened by the stretching action of the rotating ring, i.e. R = ∞ and σ = 0. Another further simplification of Eq. 2 is the elimination of the probe elastic modulus E p: the elastic moduli of the probe materials are at least three orders of magnitude larger than the skin elastic modulus so the reduced elastic modulus becomes E* ≈ E/(1 − ν 2). Using these simplifications, Eq. 2 reduces to:
From Eq. 6, it is clear that the real area of contact between a flat rigid probe and human skin decreases with smoother probe surfaces and with more compliant skin surfaces.
An empirical relation for the interfacial shear stress of thin organic films has been reported by Briscoe and Tabor [49]:
where τ0 is the intrinsic shear stress, α is the pressure coefficient and p is the contact pressure, F n /A r. The applicability of this relation to the friction of human skin has been demonstrated earlier [34, 38]. In sliding friction experiments on human skin, the term τ0 becomes significant because of the relatively low contact pressures.
Combining Eqs. 1, 6 and 7, the following expression for the friction coefficient μ = F f/F n of flat rotating ring probes is obtained:
Observe that in this model the friction coefficient is independent of the normal force because the real area of contact (Eq. 2) is proportional to the normal force. In the following paragraphs, Eq. 8 will be used to explain the experimental observations on the effect of the probe roughness and climate conditions. Subsequently, Eq. 8 will be applied quantitatively to estimate τ0 and α.
4.2 Influence of the Probe Roughness
First of all, Eq. 8 infers that with rough probe surfaces, i.e. with large σp and small R p values, the left-hand term will become less important and the pressure coefficient α will dominate the adhesion friction behaviour. On the other hand, the left term in Eq. 4 becomes especially important for smooth surfaces, in which case the real area of contact is relatively large compared to rough surfaces. In this case, the intrinsic shear strength τ0 will dominate the adhesion friction behaviour and the friction coefficient will have a greater dependency on the surface roughness of the friction probe. The results shown in Fig. 4a, b suggest that this influence is strong for surfaces with R a ≲ 1 μm. Direct evidence for the influence of the real area of contact is provided by Childs et al. [50], who observed a correlation between the real area of contact and the friction of the fingertip sliding against polymer surfaces.
Real area of contact analysis of non-Gaussian surfaces predicts a smaller A r for surfaces having relatively large skewness values [48]. This analysis was applied to the contact between extremely smooth and hard surfaces. In the current experiments on human skin, a weak but significant negative correlation was observed between friction and skewness. This suggests that in order to decrease skin friction it is beneficial to use a surface finishing technique which generates a positively skewed surface roughness, for example grid or bead blasting, provided that R a < 10 μm.
4.3 Influence of the Climate Conditions
Equation 8 shows that the friction coefficient increases with a decreasing skin elastic modulus E.
It is well documented that the hydration (moisture content) of the stratum corneum depends on the relative humidity and temperature of the environment [51–55]. And that an increased hydration of the stratum corneum decreases the stiffness of the skin [53, 56–61]. The decreased skin stiffness with increasing stratum corneum hydration can be attributed to plasticization of the stratum corneum [34]. Stratum corneum plasticization in humid conditions is caused by the replacement of lipid covalent bonds between corneocytes by weak hydrogen bonds, and by cell separation [42]. Also, the elasticity of the hydrophilic keratin fibres in the corneocytes decreases when the corneocytes lose water. The role of the stratum corneum, which is a relatively stiff and thin membrane on top of softer tissues, in the total bio-tribological response of the skin has been demonstrated by Pailler-Mattei et al. [62] using stratum corneum removal (tape-stripping).
Quantitative data on changes in the elastic modulus of the stratum corneum as a function of the environmental conditions can be obtained using isolated stratum corneum in vitro, which is not necessarily the same as the stratum corneum in vivo. However, stratum corneum corneocytes are dead cells, both in vivo and in vitro, and Christensen et al. [63] report that the in vivo viscoelastic behaviour of the stratum corneum is similar to that of isolated stratum corneum. In tensile tests with animal stratum corneum, Young’s modulus has been shown to decrease from 8800 to 12 MPa when the relative humidity increased from 30 to 90% [64], and in another similar study from 2 GPa to 3 MPa when the relative humidity increased from 30 to 100% [65]. Similar tests on human stratum corneum revealed a factor 10 reduction in the elastic modulus of human stratum corneum when the relative humidity was increased from 30 to 95% [51]; the temperature, in the range 2–45 °C, had no effect on the SC compliance in this study. Wu and van Osdol [53] calculated a reduction from ~80 to 20 MPa on the basis of the results of Wildnauer et al. [66] and additionally they report a reduction from 1000 to 5 MPa with increasing hydration on the basis of their own experiments. The strongest changes in compliance have been shown to occur at RH > 70% [51, 64]. In nanoindentation experiments, Young’s modulus has been shown to decrease from 120 to 26 MPa if the conditions change from dry to wet [67].
Summarizing, based on the physiology of skin hydration and the supportive data from in vitro mechanical tests, it is clearly beyond doubt that in a humid climate the skin elastic modulus decreases.
A subordinate effect of skin hydration is that it also reduces the surface roughness of the skin due to the effect of swelling [30, 68]. According to Eqs. 2 and 4, this effect will increase the real area of contact in static contacts, but is expected that in a sliding contact the skin roughness is significantly flattened. The effect of the skin surface roughness was studied experimentally by Nakajima and Narasaka [20] who showed a correlation between the density of primary lines (>20μm) and skin friction; the lower the density (higher age), the higher the friction. However, Nakajima and Narasaka made a remark that the density of lines corresponds to the skin elastic modulus. So, the observed correlation between skin roughness and skin friction could have been caused by interaction between roughness and elasticity. In another study, Egawa et al. [19] found that the friction coefficient was not correlated with the surface roughness amplitude R a of the skin. Only the variation in the friction coefficient was correlated with the skin roughness.
In addition to skin hydration, other physical mechanisms can also contribute to an increased skin friction in humid climates. For example, capillary adhesion could occur due to the condensation of water from the environment. In humid conditions, water condenses at the skin–probe interface—assuming that the surfaces are sufficiently wetted by water—and capillary bridges may form in the asperity contact regions. The capillary bridges exert attractive forces between the surfaces and this will increase the work of adhesion. Recently, Persson [69] developed a theory on the basis of this mechanism to describe the capillary adhesion in the static contact between elastic solids with random rough surfaces. The theory predicts that the work of adhesion depends on the relative humidity for RH > 87%, and that the effect is negligible for RH < 87%. The capillary adhesion theory has so far not been applied to the sliding friction of human skin.
Another possible mechanism, mentioned by Wolfram [70], is the formation of a glue-like layer due to the solution of skin surface lipids and proteins in water. The water can originate from the environment or from the skin itself (sweat). Recently, Pailler-Mattei et al. [71] demonstrated that the skin surface lipid film definitely influences the skin adhesion properties due to capillary phenomena. While on normal skin a significant adhesion force could be measured, the adhesion force diminished after removal of the lipid film. Using a Sebumeter SM 410®, Cua et al. [72] measured a correlation between the skin surface lipid content and friction, especially on the forehead and postauricular skin. This suggests that also in the case of sliding friction the properties of the skin surface lipid film should be taken into account. However, the importance and the physical mechanism are still unclear.
Finally, a monolayer of absorbed water can significantly influence the attraction between two surfaces by the action of Van der Waals forces alone [73]. However, a monolayer of water is always present on surfaces both under normal and humid atmospheric conditions [73]. Therefore, Van der Waals forces cannot explain the increased friction in humid conditions compared to dry conditions.
4.4 Influence of the Material
There was no significant difference between the friction of hard plastics and metals, with the exception of PTFE which has somewhat lower friction than aluminium. This can be explained by the relatively low surface energy of PTFE which may influence the adhesion forces. For all the other plastics and metals used in this study, the differences in surface energy were small. Product designers are therefore free to select either hard plastic or metal surfaces without affecting the gliding performance against the human skin of the forearm and cheek, provided that the surface roughness of the materials is constant. It is not known whether this result can be extrapolated to the palmar skin of the fingertips or the hand which is relatively rough (friction ridges) and has a relatively thick stratum corneum.
4.5 Influence of the Body Location
Less variation in friction due to variation in skin hydration was observed on the cheek than on the forearm. This can be explained by the presence of beard hairs, which carry a part of the load. Changes in skin condition on the cheek will therefore be partially masked by the presence of beard hairs and the total effect on the friction coefficient is expected to be smaller. May be also other differences between the skin of the cheek and the forearm contribute to this effect, such as differences in epidermal and dermal thickness, viscoelastic properties or sebum secretion. Also the measurement of skin hydration can be influenced by the presence of hairs [74]. To determine the role of beard hairs in skin friction, deeper investigations are required.
4.6 Quantitative Estimation of the Interfacial Shear Stress
Using Eq. 8, it is possible to estimate the intrinsic interfacial shear stress τ0 and the pressure coefficient α. In Fig. 6, the measured friction coefficients are plotted versus the parameter group π1/2 (σp/R p)−1/2, including linear regression lines. The slopes of the regression lines represent τ0 (1 − ν2)/E and the offsets represent α. The standard deviation of the asperity height distribution σp is estimated from the measured surface roughness amplitude σp ≈ R q ≈ 1.25 R a [47, 48]. The asperity radius R p was measured directly (see Table 1). In order to provide a first-order estimate for τ0, it is necessary to estimate the skin elastic modulus E and Poisson ratio υ from literature because in this study the skin elasticity was not measured. Based on suction and indentation experiments, a rough estimate is E ≈ 10–100 kPa and υ = 0.49 [38, 58, 75–78]. The variation in the reported values for E depends on the test method, test subjects, experimental length scale and skin hydration. An overview of the results is shown in Table 3.

Measured friction coefficients as a function of the model parameter π1/2 (σp/R p)−1/2: a forearm, b cheek
Despite the differences in skin hydration in dry and humid climates, the ratio τ0 (1 − ν2)/E seems to be only weakly affected by the climate. A possible explanation is that a hydration-induced reduction in skin elastic modulus corresponds to a similar reduction in the intrinsic interfacial shear stress τ0. This would suggest that the biomechanical indentation and shearing behaviour of the stratum corneum is influenced by the same physical process, i.e. the intercellular bonding strength of the corneocytes. To clarify this issue, it is necessary to conduct more accurate experiments which include simultaneous measurement of E and τ0.
Summarizing, the intrinsic interfacial shear stress is estimated to be in the order of magnitude τ0 ≈ 1 kPa. The pressure coefficient is estimated α ≈ 0.8 for dry skin and α ≈ 1.5 for hydrated skin. Similar values of τ0 ≈ 5 kPa and α = 0.8 have been reported by Adams et al. [34] for wet skin sliding against glass, and τ0 ≈ 6 kPa and α = 2 for wet skin sliding against polypropylene.
5 Conclusions
-
The surface roughness of aluminium, brass, steel and hard engineering plastics has a very strong influence on the friction coefficient of human skin. On average, the friction coefficient decreases with a factor 5 if the surface roughness increases from R a = 0.1 to 11 μm. The strongest effect is observed in the range of R a = 0.1–1 μm. The skewness of the surface roughness has a weak influence: a positive skewness is preferred to achieve low friction.
-
The climate conditions have a strong effect on the friction coefficient: the average friction coefficient increases with a factor 2 if the conditions change from a dry climate (21 °C, 30% relative humidity) to a humid climate (28 °C, 90% relative humidity). The effect of the climate is constant with respect to the design: there is no significant interaction with the probe material or the surface roughness.
-
PTFE has a 25% lower friction coefficient compared to aluminium, both in dry and humid environmental conditions. The other polymer materials used in our experiments showed no significant differences in friction compared to aluminium, brass and steel probes.
-
With respect to the body location, the effect of the climate is stronger on the ventral forearm than on the cheek, probably due to the masking effect of beard hairs. Beard stubbles may partly mask the effects of skin hydration because the stubbles carry a part of the load and decrease the real area of contact between the probe and the skin. There is no significant difference between the overall average friction coefficient measured on the cheek and the ventral forearm.
-
Several physical mechanisms can explain the increased friction coefficient in humid environments: softening of the stratum corneum, swelling of the stratum corneum, capillary adhesion due to meniscus formation, the work of adhesion due to absorbed moisture and finally the formation of a glue-like layer due to the solution of skin lipids and proteins in a thin layer of absorbed water or sweat. Further investigations are needed to determine the relative contributions of these mechanisms under different skin and environmental conditions.
-
It is possible to explain the observed skin friction behaviour using a simple friction model based on three tribological concepts: (1) adhesion friction, (2) contact mechanics of rough surfaces and (3) the interfacial shear stress of thin organic films.
References
Tomlinson, S.E., Lewis, R., Carré, M.J.: Review of the frictional properties of finger-object contact when gripping. Proc. IMechE Part J.: J. Eng. Tribol. 221, 841–850 (2007)
Derler, S., Gerhardt, L.-C., Lenz, A., Bertaux, E., Hadad, M.: Friction of human skin against smooth and rough glass as a function of the normal load. Tribol. Int. 42, 1565–1574 (2009)
O’Meara, D.M., Smith, R.M.: Static friction properties between human palmar skin and five grabrail materials. Ergonomics 44(11), 973–988 (2001)
Sasada, T.: The friction of human skin. In: 21st Biotribology Symposium, JSME, Fukuoka, pp. 46–52 (2000)
Dinc, O.S., Ettles, C.M., Calabrese, S.J., Scarton, H.A.: Some parameters affecting tactile friction. J. Tribol. 113, 512–517 (1991)
Tomlinson, S.E., Lewis, R., Carré, M.J.: The effect of normal force and roughness on friction in human finger contact. Wear 267, 1311–1318 (2009)
Derler, S., Huber, R., Feuz, H.-P., Hadad, M.: Influence of surface microstructure on the sliding friction of plantar skin against hard substrates. Wear 267, 1281–1288 (2009)
Gee, M.G., Tomlins, P., Calver, A., Darling, R.H., Rides, M.: A new friction measurement system for the frictional component of touch. Wear 259, 1437–1442 (2005)
El-Shimi, A.F.: In vivo skin friction measurements. J. Soc. Cosmet. Chem. 28, 37–51 (1977)
Sivamani, R.K., Wu, G., Maibach, H.I., Gitis, N.V.: Tribological studies on skin: measurement of the coefficient of friction. In: Serup, J., Jemec, G.B.E., Grove, G.L. (eds.) Handbook of non invasive methods and the skin, pp. 215–224. CRC Press, Boca Raton (2006)
Loden, M.: Biophysical properties of dry atopic and normal skin with special reference to effects of skin care products. Acta Derm. Venereol. Suppl. 192, 1–48 (1995)
Loden, M., Olsson, H., Axell, T., Linde, Y.W.: Friction, capacitance and transepidermal water loss (TEWL) in dry atopic and normal skin. Br. J. Dermatol. 126, 137–141 (1992)
Roberts, M.: Efficacy testing of cosmetics and toiletries. In: Butler, H. (ed.) Poucher’s Perfumes, Cosmetics and Soaps, pp. 555–599. Kluwer Academic Publishers, Dordrecht (2000)
Sivamani, R.K., Wu, G.C., Gitis, N.V., Maibach, H.I.: Tribological testing of skin products: gender, age, and ethnicity on the volar forearm. Skin Res. Technol. 9, 299–305 (2003)
Sivamani, R.K., Wu, G., Gitis, N.V., Maibach, H.I.: Tribological studies on skin: measurement of the coefficient of friction. In: Loden, M., Maibach, H.I. (eds.) Dry Skin and Moisturizers—Chemistry and Function, pp. 431–441. CRC Press, Boca Raton (2005)
Ramalho, A., Silva, C.L., Pais, A.A.C.C., Sousa, J.J.S.: In vivo friction study of human skin: influence of moisturizers on different anatomical sites. Wear 263, 1044–1049 (2007)
Sivamani, R.K., Goodman, J., Gitis, N.V., Maibach, H.I.: Friction coefficient of skin in real time. Skin Res. Technol. 9, 235–239 (2003)
Gitis, N., Sivamani, R.: Tribometrology of skin. Tribol. Trans. 47(4), 461–469 (2004)
Egawa, M., Oguri, M., Hirao, T., Takahashi, M., Miyakawa, M.: The evaluation of skin friction using a frictional feel analyzer. Skin Res. Technol. 8, 41–51 (2002)
Nakajima, K., Narasaka, H.: Evaluation of skin surface associated with morphology and coefficient of friction. Int. J. Cosmet. Sci. 15, 135–151 (1993)
Elsner, P., Wilhelm, D., Maibach, H.I.: Frictional properties of human forearm and vulvar skin: influence of age and correlation with transepidermal water loss and capacitance. Dermatologica 181, 88–91 (1990)
Cua, A.B., Wilhelm, K.-P., Maibach, H.I.: Frictional properties of human skin: relation to age, sex and anatomical region, stratum corneum hydration and transepidermal water loss. Br. J. Dermatol. 123, 473–479 (1990)
Gerhardt, L.-C., Strässle, V., Lenz, A., Spencer, N.D., Derler, S.: Influence of epidermal hydration on the friction of human skin against textiles. J. R. Soc. Interface 5, 1317–1328 (2008)
Egawa, M., Oguri, M., Kuwahara, T., Takahashi, M.: Effect of exposure of human skin to a dry environment. Skin Res. Technol. 8, 212–218 (2002)
Sulzberger, M.B., Cortese, T.A., Fishman, L., Wiley, H.S.: Studies on blisters produced by friction. J. Invest. Dermatol. 47, 456–465 (1966)
Comaish, S., Bottoms, E.: The skin and friction: deviations from amonton’s laws, and the effects of hydration and lubrication. Br. J. Dermatol. 84, 37–43 (1971)
Jordan, R., Streckert, G.: Beeinflussing der Glatte der haut durch Baden. Artztliche Kosmetologie 11, 260–266 (1981)
Roberts, A.D., Brackley, C.A.: Friction of surgeons’ gloves. J. Phys. D.: Appl. Phys. 25, A28–A32 (1992)
Adams, M.J., Gorman, D.M., Johnson S.A.: The friction and lubrication of keratinous biosubstrates. In: Proceedings of the 5th Royal Society—Unilever Indo—UK Forum in Materials Science and Engineering, pp. 277–294. Imperial College Press, Mysore, India (1999)
Gerrard, W.: Friction and other measurements. Bioeng. Skin 3, 123–137 (1987)
Bucholz, B., Frederick, L.J., Armstrong, T.J.: An investigation of human palmar skin and the effects of materials, pinch force and moisture. Ergonomics 31(3), 317–325 (1988)
Highley, D.R., Coomey, M., DenBeste, M., Wolfram, L.J.: Frictional properties of skin. J. Invest. Dermatol. 69, 303–305 (1977)
Nacht, S., Close, J.-A., Yeung, D., Gans, E.H.: Skin friction coefficient: changes induced by skin hydration and emollient application and correlation with perceived skin feel. J. Soc. Cosmet. Chem. 32, 55–65 (1981)
Adams, M.J., Briscoe, B.J., Johnson, S.A.: Friction and lubrication of human skin. Tribol. Lett. 26(3), 239–253 (2007)
Johnson, S.A., Gorman, D.M., Adams, M.J., Briscoe, B.J.: The friction and lubrication of human stratum corneum. In: Proceedings of the 19th Leeds–Lyon Symposium on Tribology, pp. 663–672 (1993)
Lewis, R., Menardi, C., Yoxall, A., Langley, J.: Finger friction: grip and opening packaging. Wear 203, 1124–1132 (2007)
Elkhyat, A., Courderot-Masuyer, C., Gharbi, T., Humbert, P.: Influence of the hydrophobic and hydrophilic characteristics of sliding and slider surfaces on friction coefficient: in vivo human skin friction comparison. Skin Res. Technol. 10, 215–221 (2004)
Kwiatkowska, M., Franklin, S.E., Hendriks, C.P., Kwiatkowski, K.: Friction and deformation behaviour of human skin. Wear 267, 1264–1273 (2009)
Moore, D.F.: The Friction and Lubrication of Elastomers. Pergamon Press, Oxford (1972)
Lambers, H., Pronk, H.: Biophysical methods for stratum corneum characterization. In: Förster, T. (ed.) Cosmetic Science and Technology Series, vol. 24. Cosmetic Lipids and the Skin Barrier, pp. 185–226. Marcel Dekker Inc., New York (2002)
Clarys, P., Barel, A.: Quantitative evaluation of skin surface lipids. Clin. Dermatol. 13, 307–321 (1995)
Freinkel, R.K., Woodley, D.T.: The biology of the skin. The Parthenon Publishing Group, New York (2001)
Naylor, P.F.D.: The skin surface and friction. Br. J. Dermatol. 67, 239–248 (1955)
Schallamach, A.: How does rubber slide? Wear 17, 301–312 (1971)
Ogilvy, J.A.: Numerical simulation of friction between contacting rough surfaces. J. Phys. D.: Appl. Phys. 24, 2098–2109 (1991)
Koudine, A.A., Barquins, M., Anthoine, P.H., Aubert, L., Lévêque, J.-L.: Frictional properties of skin: proposal of a new approach. Int. J. Cosmet. Sci. 22, 11–20 (2000)
Johnson, K.L.: Contact Mechanics. Cambridge University Press, Cambridge (1985)
Bhushan, B.: Principles and Applications of Tribology. Wiley, New York (1999)
Briscoe, B.J., Tabor, D.: Shear properties of thin polymeric films. J. Adhes. 9, 145–155 (1978)
Childs, T.H.C., Henson, B.: Human tactile perception of screen-printed surfaces: self-report and contact mechanics experiments. Proc. IMechE J.: Eng. Tribol. 221, 1–15 (2007)
van Duzee, B.F.: The influence of water content, chemical treatment and temperature on the rheological properties of stratum corneum. J. Invest. Dermatol. 71, 140–144 (1978)
Tagami, H.: Impedance measurement for evaluation of the hydration state of the skin surface. In: Lévêque, J.L. (ed.) Cutaneous Investigation in Health and Disease, pp. 79–111. Marcel Dekker, New York (1988)
Wu, K.S., van Osdol, W.W., Dauskardt, R.H.: Mechanical properties of human stratum corneum: effects of temperature, hydration, and chemical treatment. Biomaterials 27, 785–795 (2006)
Rogiers, V., Derde, M.P., Verleye, G., Roseeuw, D.: Standardized conditions needed for skin surface hydration measurements. Cosmet. Toiletries 105, 73–82 (1990)
Wilhelm, K.P.: Possible pitfalls in hydration measurements. In: Elsner P., Barel A.O., Gabard B., Serup, J. (eds.) Current Problems in Dermatology: Skin Bioengineering Techniques and Applications in Dermatology and Cosmetology, vol. 26, pp. 223–234. Karger, Basel (1998)
Jemec, G.B.E., Serup, J.: Epidermal hydration and skin mechanics. Acta Derm. Venereol. 70, 245–247 (1990)
Jemec, G.B.E., Jemec, B., Jemec, B.I.E., Serup, J.: The effect of superficial hydration on the mechanical properties of human skin in vivo: implications for plastic surgery. Plast. Reconstr. Surg. 85, 100–103 (1990)
Hendriks, F., Brokken, D., Oomens, C.W.J., Baaijens, F.P.T.: Influence of hydration and experimental length scale on the mechanical response of human skin in vivo, using optical coherence tomography. Skin Res. Technol. 10, 231–241 (2004)
Hendley, A., Marks, R., Payne, P.A.: Measurement of forces for point indentation of the stratum corneum in vivo: the influences of age, sex, site delipidisation and hydration. Bioeng. Skin 3, 234–240 (1982)
Rodrigues, L.: The in vivo biomechanical testing of the skin and the cosmetological efficay claim support: a critical overview. In: Elsner, P., Merk, H.F., Maibach, H.I. (eds.) Cosmetics: Controlled Efficacy Studies and Regulation, pp. 197–208. Springer Verlag, Berlin (1999)
Boyer, G., Laquièze, L., Le Bot, A., Laquièze, S., Zahouani, H.: Dynamic indentation on human skin in vivo: ageing effects. Skin Res. Technol. 15, 55–67 (2009)
Pailler-Mattei, C., Pavan, S., Vargiolu, R., Pirot, F., Falson, F., Zahouani, H.: Contribution of stratum corneum in determining bio-tribological properties of the human skin. Wear 263, 1038–1043 (2007)
Christensen, M.S., Hargens, C.W., Nacht, S.B., Gans, E.H.: Viscoelastic properties of intact human skin: instrumentation, hydration effects, and the contribution of the stratum corneum. J. Invest. Dermatol. 69, 282–286 (1977)
Papir, Y.O., Hsu, K., Wildnauer, R.H.: The mechanical properties of stratum corneum. I. The effect of water and ambient temperature on the tensile properties of newborn rat stratum corneum. Biochim. Biophys. Acta 399, 170–180 (1975)
Park, A.C., Baddiel, C.B.: Rheology of stratum corneum. I: a molecular interpretation of the stress-strain curve. J. Soc. Cosmet. Chem. 23, 3–12 (1972)
Wildnauer, R.H., Bothwell, J.W., Douglas, A.B.: Stratum corneum biomechanical properties. I. Influence of relative humidity on normal and extracted human stratum corneum. J. Invest. Dermatol. 56, 72–78 (1971)
Yuan, Y., Verma, R.: Measuring microelastic properties of stratum corneum. Colloids Surf. B: Biointerfaces 48, 6–12 (2006)
Batt, M.D., Fairhurst, E.: Hydration of the stratum corneum. Int. J. Cosmet. Sci. 8, 253–264 (1986)
Persson, B.N.J.: Capillary adhesion between elastic solids with randomly rough surfaces. J. Phys.: Condens. Matter 20, 315007 (11p) (2008)
Wolfram, L.J.: Friction of skin. J. Soc. Cosmet. Chem. 34, 465–476 (1983)
Pailler-Matei, C., Nicoli, S., Pirot, F., Vargiolu, R., Zahouani, H.: A new approach to describe the skin surface properties in vivo. Colloids Surf. B: Biointerfaces 68, 200–206 (2009)
Cua, A.B., Wilhelm, K.-P., Maibach, H.I.: Skin surface lipid and skin friction: relation to age, sex and anatomical region. Skin Pharmacol. 8, 246–251 (1995)
Huber, G., Mantz, H., Spolenak, R., Mecke, K., Jacobs, K., Gorb, S.N., Arzt, E.: Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements. PNAS 102, 16293–16296 (2005)
Loden, M., Hagforsen, E., Lindberg, M.: The presence of body hair influences the measurement of skin hydration with the corneometer. Acta Derm. Venereol. 75, 449–450 (1995)
Diridollou, S., Patat, F., Gens, F., Vaillant, L., Black, D., Lagarde, J.M., Gall, Y., Berson, M.: In vivo model of the mechanical properties of the human skin under suction. Skin Res. Technol. 6, 214–221 (2000)
Pailler-Mattei, C., Zahouani, H.: Analysis of adhesive behaviour of human skin in vivo by an indentation test. Tribol. Int. 39, 12–21 (2006)
Zahouani, H., Pailler-Mattei, C., Sohm, B., Vargiolu, R., Cenizo, V., Debret, R.: Characterization of the mechanical properties of a dermal equivalent with human skin in vivo by indentation and static friction tests. Skin Res. Technol. 15, 68–76 (2009)
Pailler-Mattei, C., Bec, S., Zahouani, H.: In vivo measurements of the elastic mechanical properties of human skin by indentation tests. Med. Eng. Phys. 30, 599–606 (2008)
Acknowledgements
Many thanks to Bernadette Hall, Vincent Simonetti and Mo Salih for carrying out friction tests on volunteers, to Ben Marshall for the surface roughness measurements, surface energy measurements and assistance with the data processing, to Agnieszka Kochmanska for the materials analysis, and to Remco Woen for the statistical analysis.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hendriks, C.P., Franklin, S.E. Influence of Surface Roughness, Material and Climate Conditions on the Friction of Human Skin. Tribol Lett 37, 361–373 (2010). https://doi.org/10.1007/s11249-009-9530-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-009-9530-7