
Abstract
The current article finds new soliton closed-form wave structures of the solutions of the fractional perturbed Schrödinger equation with Kerr law nonlinearity. The various kinds of solutions are accomplished by looking at a competent technique, the tanh–coth method. The nonlinear soliton wave prearrangement is analyzed and different types of soliton solutions are in the form of 3D-plots, contour plots, and 2D-plots by looking at the different values of the parameters presented to describe the propagation of traveling wave solutions. The results obtained are new and may be applicable for some physical fields, like optical fibers, plasma fluids, and bimolecular dynamical modes. The discovery of a new optical soliton could have ramifications in other photonics fields, such as nonlinear optics fibers and spectroscopy, fractal medium in the future.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Fractional Partial differential equations (FPDEs) are used to represent physical phenomena to better understand their behavior, and they form the foundation of most mathematical and physical simulations of real-world applications. Several real-life situations have been described in terms of fractional derivatives such as optical fiber, porous medium, fluid dynamics, viscoelastic materials, signal processing, ocean waves, plasma physics, electromagnetism, wave propagation, photonic, chaotic systems, nuclear physics, building materials, and many more. A balance of wave dispersion and nonlinearity produces solitons. Temporal solitons are easily generated in optical fiber waveguides and laser resonators in optics, and they have recently been discovered in dielectric micro cavities. The Kerr effect provides nonlinear group velocity dispersion adjustment in each of these circumstances (nonlinear refractive index). Closed-form analytical solutions make a substantial contribution to easily, more correctly, and explicitly expressing these phenomena. Even a simple closed-form solution with no genuine physical implications can be used as a test problem to verify the accuracy and reliability of various numerical, approximate analytical, and asymptotic approaches. In the current era, solitons are the more attractive area of research. The hypothesis of optical solitons is one of the pleasurable themes for the examination of solitons movement through nonlinear optical fibers, extreme laser radiation into plasmas. Within the field of solitary waves, studies of optical solitons have garnered a lot of traction.
Several beneficial strategies have been proposed in recent years in some previous decades, such as the tanh-method (Wazwaz 2005), Darboux transformation (Li et al. 2020), modified Kudryashov’s method (Hosseini et al. 2018), \(\left( {G^{\prime}/G} \right)\)-expansion method (Aniqa and Ahmad 2021; Zhang et al. 2008; Wang et al. 2008), Novel \(\left( {G^{\prime}/G} \right)\)-expansion method (Alam et al. 2013; Shakeel and Mohyud-Din 2015; Hussain et al. 2017), first integral method (Eslami et al. 2017; Rezazadeh et al. 2018), Hirota bilinear technique (Liu et al. 2020), symbolic computational method (Ali et al. 2021), trial equation method (Liu 2019), Auxiliary equation method (Akbulut and Kaplan 2018), Explicit exponential finite difference methods (Inan et al. 2020), a generalized unified method (Osman 2017), Sine-Gordon expansion method (Ali et al. 2020), Genocchi polynomials (Kumar et al. 2021), new extended direct algebraic method (Rehman et al. 2021; Bilal and Ahmad 2021) and so on. Moreover, a new technique called the generalized exponential rational function method was first proposed by Ghanbari and Inc in (2018). This method was fruitfully and effectively employed to a resonance nonlinear Schrödinger equation (Ghanbari and Inc 2018), to a generalized Camassa–Holm–Kadomtsev–Petviashvili equation (Ghanbari and Liu 2020), to a new extension of nonlinear Schrödinger equation (Ghanbari et al. 2020), to conformable Ginzburg–Landau equation with the Kerr law nonlinearity (Ghanbari and Gómez-Aguilar 2019). The nonlinear Schrödinger's (NLS) equation is considered as the most important model related to highlighted research fields (Osman et al. 2020).
The higher-order Schrodinger equation comprising the parameters, which is used to describe cardiac output in optical fibers, is shown to acknowledge the formation of an infinite extension of the four-parameter combination, in addition to the classical NLSE. In the literature, different types of solutions were developed by many authors using different techniques for different types of Schrödinger equations. Recently, several authors have developed a variety of solutions for the MUSE using a variety of methods. The solitary wave solutions and exact solutions were found using the modified extended auxiliary equation mapping approach (Arshad et al. 2017). A rational exponential approach has been used to find the solutions for Schrödinger's unstable equation (Yang et al. 2018). To obtain optical soliton solutions for the unstable Schrödinger equation, an expanded map technique was devised. A simple mathematical method was used to derive the elliptic work solution, dark and bright soliton solutions for MUSE (Jia and Guo 2019). Many authors have looked into multiple ways for solving nonlinear MUSEs (Sinha and Ghosh 2017; Kumar et al. 2015). The Exp-function method was used to find soliton solutions for fractional modified Schrödinger equations (Zulfiqar and Ahmad 2020). The cubic-quartic NLSE and resonant NLSE with parabolic law have optical soliton solutions (Gao et al. 2020). The tanh method and the tanh–coth method have been used to obtain optical solitons from NLSE with quintic nonlinearity identified as the perturbed Gerdjikov–Ivanov equation (Zulfiqar and Ahmad 2021). The nonautonomous complex wave solutions described by the coupled Schrödinger–Boussinesq equation with variable-coefficients (Osman et al. 2018). Optical solutions, traveling wave solutions, and exact solutions for the nonlinear Schrödinger equation with Kerr law nonlinearity have been developed using a variety of methods (Akram and Mahak 2018; Baleanu et al. 2017; Biswas and Konar 2006; Jhangeer et al. 2020).
The pioneer paintings of Malfliet (1992) added the powerful tanh approach for a reliable treatment of the nonlinear wave equations. The beneficial tanh approach is extensively used by many together with Wazwaz. Later, the tanh–coth method, advanced via Wazwaz (2006), is a right away and powerful algebraic approach for coping with nonlinear equations. Many problems have been solved with tanh in the literature, including the Kawahara and modified Kawahara equations (Mohamad-Jawad and Slibi 2012), as well as the combined KdV equation (Jawad et al. 2013). space–time fractional nonlinear Whitham–Broer–Kaup equations, space–time fractional nonlinear coupled Burgers equations, space–time fractional nonlinear coupled mKdV equations (Zayed et al. 2016), and (2 + 1)-some Bogoyavlenskii scheme solved using an extended tanh operation (Leta et al. 2021). In this article, we will study the fractional perturbed Schrödinger equation with Kerr law nonlinearity (p-NSKN) using the conformable derivative. No one has ever read the p-NSKN equation of non-integer orders in the literature, to the author's knowledge. As a result, utilizing the tanh–coth approach to examine the non-integer order p-NSKN equation provides a very plausible way to understand how this model works physically. We will employ the tanh method and the tanh–coth method to obtain new analytical solutions for the fractional p-NSKN equation via conformable derivative in this paper. This conformable derivative definition is based on the fundamental notion of an ingredient limit, which has been effectively applied to a variety of problems like coupled fractional resonant Schrödinger equations arising in quantum mechanics have been resolved in the conformable fractional derivative sense, Fuzzy conformable fractional differential equations, nonlinear conformable time-fractional equation, conformable fractional perturbed Gerdjikov-Ivanov equation (Al-Smadi et al. 2020; Arqub and Al-Smadi 2020; Kaplan 2017; Zulfiqar and Ahmad 2021). The conformable fractional p-NSKN equation is one of the most important dynamic models with several applications in the non-line optical fiber that defines the shortest signal transmission in fiber optics. The exact and approximate solutions of this model have a wide range of applications in telecommunications, engineering, medicine, physics, clinics, and various other areas of science.
Definition
Khalil proposed a thrilling definition of derivative known as conformable spinoff (Khalil 2014) along with a set of properties. This derivative may be considered to be a natural extension of the classical by-product. Moreover, the conformable by-product satisfies all the properties of the same old calculus and is defined by:
2 Method description
Considering the nonlinear equation with the conformable derivative:
By means of the transformation
Substituting Eq. (3) in Eq. (2) and integrating, one has Eq. (4)
Introducing a new independent variable
leads to the change of variables
For tanh–coth method
where m is a positive integer, for this method, that will be determined by balancing principle.
Substituting (7) into (5) results is an algebraic system of equations in powers of Y that will lead to the determination of the parameters \(a_{m}\), \(b_{m} .\)
3 Numerical application
The following conformable fractional form p-NSKN equation is considered
where u(x, t) specifies the macroscopic complex-valued wave profile of temporal and spatial independent variables of t and x, respectively, β represents the fiber loss, constants \(f_{1}\) and \(f_{2}\) show the dispersion and nonlinear terms respectively.
Fractional traveling wave transformation is
where \(r\) represents the phase component, \(\mu\) is the wavenumber and s represents the frequency.
Substituting Eq. (9) in (8) and separating the real and imaginary part, we get
Equations (10) and (11) have the same solutions with the restriction
With the restrictions (12), Eqs. (10) and (11) convert into the following single equation:
Balancing \(U^{\prime\prime}\) with \(U^{3}\), we get \(m = 1\). Equation (13) becomes
By substituting Eq. (14) in (13) along with Eq. (9), we obtain the system
Solving this system by Maple, we have:
Case 1
Case 2
Case 3
Case 4
Case 5
4 Results and discussion
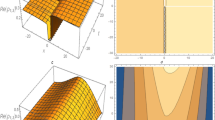
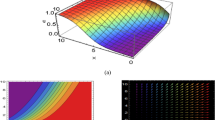
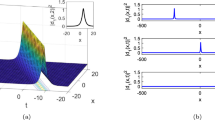
By resolving the fractional p-NSKN problem with the help of conformable fractional derivative, the tanh–coth technique is used to obtain optical soliton solutions in this article. Because of its wide range of applications, the p-NSKN is the most extensively used nonlinear model in applied research. The transmission of optical solitons in Kerr law nonlinearity optical fibers is described by this equation. In the literature, the p-NSKN equation has been resolved to get a different kinds of solutions by the utilization of various techniques such as \(\frac{{G}^{^{\prime}}}{{G}^{2}}\) technique has been applied to get hyperbolic, trigonometric, and rational type solutions (Osman et al. 2018), Riccati–Bernoulli sub-ODE method has been employed to form the new periodic singular, dark singular, dark singular, exact, soliton solutions (Akram and Mahak 2018), the new extended algebraic technique has been developed to derive the singular, bright-dark, and rational type solutions (Biswas and Konar 2006). According to the literature, the proposed model has been solved for integer order. Using the conformable derivative, we resolve the proposed model for both integer and non-integer order in our study. We observed some similarities in the current results for integer order, but we created new and more general conclusions for non-integer order. In addition, the physical appearance of the solitary waves shows the variations in the graphics by fluctuating parametric values. Figures 1, 2, 3, 4, 5 show the graphical behavior of the presented fractional model in 3D, 2D, and contour plots at \({\upalpha } = 0.5,\,\,{\upalpha } = 0.8\) and \(\alpha = 1.\) Figure 1 indicates the solution of \(u_{1} \left( {x,t} \right)\) for \(b_{1} = \frac{1}{4},\,s = 0.1,r = 1.5,\,{\upmu } = 2.\) Figure 2 shows the graphics of \(u_{2} \left( {x,t} \right)\) at \(a_{1} = \frac{1}{2},\,s = 0.1,r = 1,\,{\upmu } = 0.5.\) Figure 3 reveals the solution of \(u_{3} \left( {x,t} \right)\) for \(a_{1} = \frac{1}{2},\,s = 0.1,r = 1,\,{\upmu } = 0.5.\) Figure 4 describes the physical appearance of \(u_{4} \left( {x,t} \right)\) for \(a_{1} = \frac{1}{2},\,s = 0.1,r = 1,\,{\upmu } = 0.5.\) Figure 5 signifies the plot of \(u_{5} \left( {x,t} \right)\) with the parametric values of \(a_{0} = \frac{1}{2},\,s = 0.1,r = 1,\,{\upmu } = 0.5.\)


Graphics for \(u_{1} \left( {x,t} \right)\), a–c with \(0 \le x \le 5,\,0 \le t \le 10,\) show the 3D plots. d–f with \(- 5 \le x \le 5,\, - 5 \le t \le 5,\)\(- 1 \le x \le 2,\, - 1 \le t \le 2,\) illustrate the contour comparison, and \(- 1 \le x \le 2,\, - 1 \le t \le 2,\) respectively. g Indicates the comparison in the form of 2D plot


Graphics for \(u_{2} \left( {x,t} \right)\), a–c with \(0 \le x \le 20,\,0 \le t \le 10,\) indicate the 3D comparison plots, d–f with \(- 5 \le x \le 5,\, - 5 \le t \le 5\), describe the contour comparison plots. g Indicates the comparison in the form of 2D plot


Graphics for \(u_{3} \left( {x,t} \right)\), a–c with \(0 \le x \le 5,\,0 \le t \le 10,\) indicate the 3D comparison plots, d–f with \(- 1 \le x \le 1,\, - 1 \le t \le 1,\)\(- 5 \le x \le 5,\, - 5 \le t \le 5,\) and \(- 5 \le x \le 5,\, - 5 \le t \le 5,\) depict the contour comparison plots respectively. g Indicates the comparison in the form of 2D plot


Graphics for \(u_{4} \left( {x,t} \right)\), a–c with \(0 \le x \le 10,\,0 \le t \le 5,\) show the 3D comparison plots, d–f with \(- 1 \le x \le 1,\, - 1 \le t \le 1,\)\(- 5 \le x \le 5,\, - 5 \le t \le 5,\) and \(- 5 \le x \le 5,\, - 5 \le t \le 5,\) illustrate the contour comparison plots respectively. g Indicates the comparison in the form of 2D plot


Graphics for \(u_{5} \left( {x,t} \right)\), a–c with \(0 \le x \le 30,\,0 \le t \le 10,\) show the 3D comparison plots, d–f with \(- 5 \le x \le 5,\, - 5 \le t \le 5\) illustrate the contour comparison plots. g Indicates the comparison in the form of 2D plot
The presented work shows that the fractional derivative has a very significant part to play in considering the formation of the evolutionary equation and explains the continuous performance of the solution wave all over the process. Comprehensive testing confirms that the method used is reliable, efficient, and very powerful in testing different types of nonlinear FDEs.
5 Conclusion
In this work, we discover and analyze new soliton solutions and dynamic properties in optical nanofibers for fractional perturbed Schrödinger equation and Kerr law nonlinearity. The tanh–coth method with fractional conformable derivative and fractional complex transformation was used to obtain the soliton solutions in closed-form wave structures. Moreover, from the graphical demonstration, we have seen that different boundary values provide different types of solutions by identifying free parameters corresponding to the required limitations to confirm the presence of such optical solitons. The model's solution can be used in a variety of science and engineering domains. As a result, we conclude that the fractional calculus structures model provided in this study is extremely versatile and accurately analyses dynamical global systems. The acquired solutions are more generic, novel, and have not been previously described in the literature. The findings also support the importance and usefulness of the methodologies employed, as well as pique the interest of scholars interested in deciphering the model's intricacy. Using the appropriate fractional operator, we may also extend our work to answer more difficult biological and engineering challenges. The presented analytical method can be applied to the other forms of nonlinear evolution equations arising in engineering, mathematical physics, and biological sciences. The new results of this paper are very encouraging to carry out further studies with the addition of different perturbation and complex nonlinear concepts.
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Akbulut, A., Kaplan, M.: Auxiliary equation method for time-fractional differential equations with conformable derivative. Comput. Math. Appl. 75(3), 876–882 (2018)
Akram, G., Mahak, N.: Traveling wave and exact solutions for the perturbed nonlinear Schrödinger equation with Kerr law nonlinearity. Eur. Phys. J. plus 133(6), 1–9 (2018)
Alam, M.N., Akbar, M.A., Mohyud-Din, S.T.: A novel (G′/G)-expansion method and its application to the Boussinesq equation. Chin. Phys. B 23(2), 1–10 (2013). https://doi.org/10.1088/1674-1056/23/2/020203
Ali, K.K., Osman, M.S., Abdel-Aty, M.: New optical solitary wave solutions of Fokas-Lenells equation in optical fiber via Sine-Gordon expansion method. Alex. Eng. J. 59(3), 1191–1196 (2020)
Ali, K.K., Yilmazer, R., Osman, M.S.: Extended Calogero-Bogoyavlenskii-Schiff equation and its dynamical behaviors. Phys. Scr. 96(12), 1–11 (2021). https://doi.org/10.1088/1402-4896/ac35c5
Al-Smadi, M., Arqub, O.A., Momani, S.: Numerical computations of coupled fractional resonant Schrödinger equations arising in quantum mechanics under conformable fractional derivative sense. Phys. Scr. 95, 1–21 (2020). https://doi.org/10.1088/1402-4896/ab96e0
Aniqa, A., Ahmad, J.: Soliton solution of fractional Sharma-Tasso-Olever equation via an efficient (G′/G)-expansion method. Ain Shams Eng. J. 13(1), 1–23 (2021). https://doi.org/10.1016/j.asej.2021.06.014
Arqub, O.A., Al-Smadi, M.: Fuzzy conformable fractional differential equations: novel extended approach and new numerical solutions. Soft Comput. 24, 1–22 (2020)
Arshad, M., Seadawy, A.R., Lu, D.: Bright–dark solitary wave solutions of generalized higher-order nonlinear Schrödinger equation and its applications in optics. J. Electromagn. Waves Appl. 31(16), 1711–1721 (2017)
Baleanu, D., Inc, M., Aliyu, A.I., Yusuf, A.: Dark optical solitons and conservation laws to the resonance nonlinear Shrödinger’s equation with Kerr law nonlinearity. Optik 147, 248–255 (2017)
Bilal, M., Ahmad, J.: Dynamics of soliton solutions in saturated ferromagnetic materials by a novel mathematical method. J. Magn. Magn. Mater. 538, 1–20 (2021). https://doi.org/10.1016/j.jmmm.2021.168245
Biswas, A., Konar, S.: Introduction to non-Kerr law optical solitons. CRC Press (2006)
Eslami, M., Khodadad, F.S., Nazari, F., Rezazadeh, H.: The first integral method applied to the Bogoyavlenskii equations by means of conformable fractional derivative. Opt. Quant. Electron. 49(12), 1–18 (2017)
Gao, W., Ismael, H.F., Husien, A.M., Bulut, H., Baskonus, H.M.: Optical soliton solutions of the cubic-quartic nonlinear Schrödinger and resonant nonlinear Schrödinger equation with the parabolic law. Appl. Sci. 10(1), 219 (2020)
Ghanbari, B., Gómez-Aguilar, J.F.: The generalized exponential rational function method for Radhakrishnan-Kundu-Lakshmanan equation with β-conformable time derivative. Revista Mexicana De Física 65(5), 503–518 (2019)
Ghanbari, B., Inc, M.: A new generalized exponential rational function method to find exact special solutions for the resonance nonlinear Schrödinger equation. Eur. Phys. J. Plus 133(4), 1–18 (2018)
Ghanbari, B., Liu, J.G.: Exact solitary wave solutions to the (2+ 1)-dimensional generalised Camassa–Holm–Kadomtsev–Petviashvili equation. Pramana 94(1), 1–11 (2020)
Ghanbari, B., Günerhan, H., İlhan, O.A., Baskonus, H.M.: Some new families of exact solutions to a new extension of nonlinear Schrödinger equation. Phys. Scr. 95(7), 075208 (2020)
Hosseini, K., Mayeli, P., Kumar, D.: New exact solutions of the coupled sine-Gordon equations in nonlinear optics using the modified Kudryashov method. J. Mod. Opt. 65(3), 361–364 (2018)
Hussain, R., Rasool, T., Ali, A.: Travelling wave solutions of coupled Burger’s equations of time-space fractional order by novel (Gʹ/G)-expansion method. ASTES 2, 8–13 (2017)
Inan, B., Osman, M.S., Ak, T., Baleanu, D.: Analytical and numerical solutions of mathematical biology models: the Newell-Whitehead-Segel and Allen-Cahn equations. Math. Methods Appl. Sci. 43(5), 2588–2600 (2020)
Jawad, A.J.A.M., Petkovic, M.D., Biswas, A.: Soliton solutions to a few coupled nonlinear wave equations by tanh method. Iran. J. Sci. Technol. 37, 109–115 (2013)
Jhangeer, A., Seadawy, A.R., Ali, F., Ahmed, A.: New complex waves of perturbed Shrödinger equation with Kerr law nonlinearity and Kundu-Mukherjee-Naskar equation. Results Phys. 16, 1–8 (2020). https://doi.org/10.1016/j.rinp.2019.102816
Jia, R.R., Guo, R.: Breather and rogue wave solutions for the (2+ 1)-dimensional nonlinear Schrödinger–Maxwell–Bloch equation. Appl. Math. Lett. 93, 117–123 (2019)
Kaplan, M.: Applications of two reliable methods for solving a nonlinear conformable time-fractional equation. Opt. Quant. Electron. 49(9), 312 (2017). https://doi.org/10.1007/s11082-017-1151-z
Khalil, R., Al horani, M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Apll. Math. 264, 65–70 (2014)
Kumar, A.S., Prasanth, J.P., Bannur, V.M.: Quark-gluon plasma phase transition using cluster expansion method. Physica. A Stat. Mech. Appl. 432, 71–75 (2015)
Kumar, S., Kumar, R., Osman, M.S., Samet, B.: A wavelet based numerical scheme for fractional order SEIR epidemic of measles by using Genocchi polynomials. Numer. Methods Partial Differ. Equ. 37(2), 1250–1268 (2021)
Leta, T.D., Liu, W., El Achab, A., Rezazadeh, H., Bekir, A.: Dynamical behavior of traveling wave solutions for a (2+ 1)-dimensional Bogoyavlenskii coupled system. Qual. Theory Dyn. Syst. 20(1), 1–22 (2021)
Li, Y., Li, R., Xue, B., Geng, X.: A generalized complex mKdV equation: Darboux transformations and explicit solutions. Wave Motion 98, 102639 (2020). https://doi.org/10.1016/j.wavemoti.2020.102639
Liu, T.: Exact solutions to time-fractional fifth order KdV equation by trial equation method based on symmetry. Symmetry 11(6), 742 (2019)
Liu, J.G., Zhu, W.H., Osman, M.S., Ma, W.X.: An explicit plethora of different classes of interactive lump solutions for an extension form of 3D-Jimbo–Miwa model. Eur. Phys. J. plus 135(5), 1–9 (2020)
Malfliet, W.: Solitary wave solutions of nonlinear wave equations. Am. J. Phys. 60(7), 650–654 (1992)
Mohamad-Jawad, A.J.A., Slibi, T.S.: Traveling wave solutions using tanh method for solving Kawahara and modified Kawahara equations. Al-Rafidain University College for Sciences, p. 30 (2012)
Osman, M.S.: Multiwave solutions of time-fractional (2+ 1)-dimensional Nizhnik–Novikov–Veselov equations. Pramana 88(4), 1–9 (2017)
Osman, M.S., Machado, J.A.T., Baleanu, D.: On nonautonomous complex wave solutions described by the coupled Schrödinger-Boussinesq equation with variable-coefficients. Opt. Quant. Electron. 50(2), 1–11 (2018)
Osman, M.S., Ali, K.K., Gómez-Aguilar, J.F.: A variety of new optical soliton solutions related to the nonlinear Schrödinger equation with time-dependent coefficients. Optik 222, 165389 (2020)
Rehman, H.U., Bibi, M., Saleem, M.S., Rezazadeh, H., Adel, W.: New optical soliton solutions of the Chen–Lee–Liu equation. Int. J. Mod. Phys. B 35(18), 2150184 (2021)
Rezazadeh, H., Manafian, J., Khodadad, F.S., Nazari, F.: Traveling wave solutions for density-dependent conformable fractional diffusion–reaction equation by the first integral method and the improved tan(φ(ξ)/2) -expansion method. Opt. Quant. Electron. 50(3), 1–15 (2018). https://doi.org/10.1007/s11082-018-1388-1
Shakeel, M., Mohyud-Din, S.T.: A Novel (Gʹ/G)-expansion method and its application to the space-time fractional symmetric regularized long wave (SRLW) equation. Adv. Trends Math. 2, 1–16 (2015)
Sinha, D., Ghosh, P.K.: Integrable nonlocal vector nonlinear Schrödinger equation with self-induced parity-time-symmetric potential. Phys. Lett. A 381(3), 124–128 (2017)
Wang, M., Li, X., Zhang, J.: The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 372(4), 417–423 (2008)
Wazwaz, A.M.: The tan h method: solitons and periodic solutions for the Dodd–Bullough–Mikhailov and the Tzitzeica–Dodd–Bullough equations. Chaos, Solitons Fractals 25(1), 55–63 (2005)
Wazwaz, A.M.: Two reliable methods for solving variants of the KdV equation with compact and noncompact structures. Chaos Solitons Fractals 28(2), 454–462 (2006)
Yang, Z.J., Zhang, S.M., Li, X.L., Pang, Z.G.: Variable sinh-Gaussian solitons in nonlocal nonlinear Schrödinger equation. Appl. Math. Lett. 82, 64–70 (2018)
Zayed, E.M., Amer, Y.A., Shohib, R.M.: The fractional complex transformation for nonlinear fractional partial differential equations in the mathematical physics. J. Assoc. Arab Univ. Basic Appl. Sci. 19, 59–69 (2016)
Zhang, S., Tong, J.L., Wang, W.: A generalized (G′ G)-expansion method for the mKdV equation with variable coefficients. Phys. Lett. A 372(13), 2254–2257 (2008)
Zulfiqar, A., Ahmad, J.: Soliton solutions of fractional modified unstable Schrödinger equation using exp-function method. Results Phys. 19, 1–14 (2020). https://doi.org/10.1016/j.rinp.2020.103476
Zulfiqar, A., Ahmad, J.: New optical solutions of conformable fractional perturbed Gerdjikov–Ivanov equation in mathematical nonlinear optics. Results Phys. 21, 103825 (2021). https://doi.org/10.1016/j.rinp.2021.103825
Author information
Authors and Affiliations
Contributions
AZ: Conceptualization, Methodology, Software, Writing-original draft preparation, Formal analysis. JA: Resources, Supervision, Writing-reviewing and editing, Validation.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zulfiqar, A., Ahmad, J. Dynamics of new optical solutions of fractional perturbed Schrödinger equation with Kerr law nonlinearity using a mathematical method. Opt Quant Electron 54, 197 (2022). https://doi.org/10.1007/s11082-022-03598-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-022-03598-8