
Abstract
In this paper, with the aid of the Mathematica package, several classes of exact analytical solutions for the time-fractional \((2+1)\)-dimensional Ito equation are obtained. To analytically tackle the above equation, the Kudryashov simple equation approach and its modified form are applied. Rational, exponential-rational, periodic, and hyperbolic functions with a number of free parameters were represented by the obtained soliton solutions. Graphical illustrations with special choices of free constants and different fractional orders are included for certain acquired solutions. Both approaches include the efficiency, applicability and easy handling of the solution mechanism for nonlinear evolution equations that occur in the various real-life problems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A wide range of complex phenomena in the fields of physics, engineering, chemistry, biology, and finance dynamics are modeled by nonlinear ordinary (NODEs) and partial (NPDEs) differential equations of integer and fractional orders (Wazwaz 2009; Kilbas et al. 2006; Owusu et al. 2020). Since there is no single method that can treat various kinds of nonlinear evolution equations (NLEEs), many techniques have been proposed, modified, and expanded for seeking exact analytic, semi-analytic and numerical solutions for NLEEs in conjunction with the development of software symbolic computations that helps researchers accomplish these tasks. Such solutions expand the area of understanding qualitative and measurable features of complex phenomena to draw efficient and appropriate conclusions. For this purpose, a variety of effective approaches have been suggested. The Darboux transformation (Gu et al. 1999), Bifurcation method (Song and Yang 2010), Hirota bilinear method (Hirota 2004), iterative shehu transform method (Akinyemi and Iyiola 2020b), expansion version of method (Wang et al. 2008), Adomian decomposition method and ifts extensions (Az-Zo’bi and Al-Khaled 2010; Az-Zo’bi 2013, 2014; Az-Zo’bi et al. 2019), Exp-function method (Ozis and Aslan 2018), F-expansion method (Seadawy and El-Rashidy 2018; Wang and Li 2005), He’s variational iteration method (Az-Zo’bi 2015), inverse scattering method (Biondini et al. 2016), reduced differential transform method (Az-Zo’bi et al. 2015, 2020; Az-Zo’bi 2014), homogeneous balance method (Rady et al. 2010), q-homotopy analysis method (Senol et al. 2019; Akinyemi et al. 2020; Akinyemi 2019), Lie symmetry method (Olver 1993), first integral method (Akram and Mahak 2018), residual power series method (Senol 2020; Az-Zo’bi 2018, 2019; Az-Zo’bi et al. 2019), simplest equation method (SEM) (Kudryashov 2005a, b), modified simplest equation method (MSEM) (Jawad et al. 2010), exp-\(\phi {(\xi )}\) method (Az-Zo’bi 2019), q-homotopy analysis transform method (Akinyemi 2020; Akinyemi and Huseen 2020; Akinyemi and Iyiola 2020a), sub-equation method (Kurt et al. 2020; Akinyemi et al. 2021), modified extended direct algebraic method (Arshad et al. 2017a), modified extended mapping method (Arshad et al. 2017b) and some others (Seadawy et al. 2019; Helal et al. 2014; Lu et al. 2018; Seadawy et al. 2020; Iqbal et al. 2020; Farah et al. 2020; Ahmad et al. 2020).
The simple equation method (SEM), derived by Kudryashov, and its expansions (Irshad et al. 2017; Arnous et al. 2017; Al-Amr and El-Ganaini 2017; Hossain et al. 2018; Zayed et al. 2019; Vitanov 2019; Az-Zo’bi 2019a, b) have succeeded in constructing solutions for several NLEEs. By means of the SEM and MSEM, this work will focus on constructing new analytic solutions for the time-fractional \((2+1)\)-dimensional Ito integro–differential equation in the conformable derivative sense:
where \(\partial _{x}=\frac{\partial }{\partial {x}},\,\partial _{y}=\frac{\partial }{\partial {y}},\) \(\partial _{t}^{*\rho }\) is the conformable time-fractional derivative operator of order \(\rho \,(0<\rho \le {1}),\,\alpha\) and \(\beta\) are given constants, and u(x, y, t) denotes the relevant waves amplitude that approaches zero as x unboundedly decreases. By making use of differential operator \(u=\partial _{x}v\), Eq. 1 will be converted into the fifth-order NPDE
The Ito model (Eq. 2) (or equivalently Eq. 1) was firstly derived by generalizing the well-known bilinear Korteweg-de Vries equation (Ito 1980). For \(\alpha =\beta =0\), we get the one-dimensional Ito equation. Recently, many authors have paid their concern to analytically process the (2+1)-dimensional Ito equation of integer time-derivative (\(\rho =1\)); Wazwaz (2008) applied the tanh-coth method to derive single soliton and periodic solutions. Also, N-solitons were derived by combining Hereman’s method and Hirota’s method. The extended homoclinic test technique and the bilinear method were performed to obtain single, two-solitons, periodic and doubly-periodic wave solutions (Li and Zhao 2009). Hyperbolic and periodic solutions were obtained using the extended F-expansion method (Bhrawy et al. 2012). The \(\left( {G}^{\prime }/G\right)\) method was used to carry out one-soliton solutions (Ebadi et al. 2012). Adem (2016) deduced multiple wave solutions by using the multiple exp-function algorithm. The Wronskian determinant technique was employed by Yildirim and Yasar (2018). Lump and stripe solutions with the diversity of interactions basing on the Hirota bilinear form were investigated by Ma et. al. in Yang et al. (2018), Ma et al. (2018), He et al. (2019).
This paper is prepared, in what follow, to present the basic concepts of conformable fractional calculus theory in Sect. 2. Mathematical analysis of the employed methods is included in Sect. 3. The derived exact analytic solutions for Eq. 1 by applying the proposed techniques are discussed in Sect. 4. Discussion and conclusions, with numerical simulations of some obtained solitons, are displayed in Sect. 5.
2 Conformable fractional derivative
Khalil et al. (2014) suggested the conformable fractional derivative (CFD) which satisfies the basic principles of normal derivative. In this section, the basic definition and necessary properties of the CFD are given. Suppose that \(u\left( t\right)\)is a function defined for \(t>0\). The CFD of order \(\rho\), \(0<\rho \le 1\), is defined as
In the following theorem, the useful properties of the CFD are listed.
Theorem 2.1
(Ma et al. 2018; He et al. 2019; Abdeljawad 2015) Suppose that \(u_1(t)\) and \(u_2(t)\) are two \(\rho\)-differentiable functions on some interval I in the positive semi half space \((0,\infty ),\,\rho \in (0,1]\) and \(\nu\) are real numbers. Then
-
1.
The CFD operator is linear,
-
2.
\({\mathcal {D}}_{t}^{\rho }C=0,\) C is constant.
-
3.
\({\mathcal {D}}_{t}^{\rho }t^{\nu }=\nu \,t^{\nu -\rho }.\)
-
4.
\({\mathcal {D}}_{t}^{\rho }(u_1\,u_2)=u_2\,{\mathcal {D}}_{t}^{\rho }u_1+u_1\,{\mathcal {D}}_{t}^{\rho }u_2.\)
-
5.
\({\mathcal {D}}_{t}^{\rho }\left( \frac{u_1}{u_2}\right) =\frac{u_2\,{\mathcal {D}}_{t}^{\rho }u_1-u_1\,{\mathcal {D}}_{t}^{\rho }u_2}{u_2^{2}}.\)
-
6.
\({\mathcal {D}}_{t}^{\rho }u_1(u_2(t))=t^{1-\rho }{u_2}^{\prime }(t){u_1}^{\prime }(v(t)).\)
-
7.
\({\mathcal {D}}_{t}^{\rho }u_1=t^{1-\rho }u_1^{\prime }\) are satisfied for all \(t\in {I}.\)
Remark 1
Recently, several researchers have used the CFD when treating the fractional differential equations due to the efficiency and applicability of the CFD, which overcomes the existence complexity of other fractional derivatives such as Riemann-Liouville and Caputo. See Osman et al. (2019), Islama et al. (2019), Kurt et al. (2020), Zhu et al. (2019), Odabas (2020), Korpinar et al. (2020) for more detailed.
3 Mathematical analysis
In the current section, solution procedure to the constant-coefficients (2+1)-dimensional PDE
using the SEM and MSEM are outlined. P is assumed to be a polynomial \(u=u\left( x,y,t\right)\) and its derivatives including the highest derivative and the higher power of linear terms. The solution process also works for time-dependent coefficients NPDEs and systems. The SEM includes many other existing schemes; the Riccati equation, sub-equation, F-expansion, and \(\big (G^{\prime }/G\big )\) methods. The MSEM is considered here since it has a different procedure that used in the other one as will be shown in Sect. 3.2. To investigate Eq. 4, assume that its exact solution has the form
where \(\xi =x+y-\eta \,\frac{{{t}^{\rho }}}{\rho }\) is the wave variable, and \(\eta\) is the wave frequency. In the time-dependent case, we put \(\eta =\eta \left( t\right)\). Under this consideration, and by using of properties of the CFD in Theorem 2.1, Eq. 4 is reduced to be
where \({{u}^{\left( i\right) }}=\frac{{{d}^{i}}u}{d{{\xi }^{i}}}\), \(i\ge 1\) . Taking integration of Eq. 6 as much as possible and setting the integration constants to zero, will reduce the transformed equation and keep the solution process as simple as possible. According to the aforementioned schemes, a positive integer M should be calculated by balancing the derivative with the highest order and the linear term of highest order in the completely-integrated form of Eq. 6. In what follow, the solution steps of each method will be discussed.
3.1 The simple equation method
The solution of Eq. 6 using the SEM (Kudryashov 2005a, b) can be expressed as
where \(B_{i}(i=0,1,\ldots ,M)\) are the parameters to be calculated, the function \(\phi (\xi )\) is assumed to satisfy some solvable ODE of order less than the completely-integrated form of Eq. 6 known by the simplest equation. The simplest equations considered in this work are the Bernoulli and Riccati first order ODEs. By using the Bernoulli equation
as a simplest equation, the solution function \(\phi (\xi )\) will definitely possess
-
i.
the rational form
-
ii.
the rational-exponential form
or,
In the case of using the simplest Riccati equation
\(\phi (\xi )\) will be in the following form:
-
i.
the hyperbolic form
$$\begin{aligned} \phi (\xi )=-\frac{\sqrt{-\lambda \,\mu }}{\lambda }\tanh \left( \sqrt{-\lambda \,\mu }\,\xi +{{\xi }_{0}}\right) , \end{aligned}$$(13)
or,
if \(\lambda\,\mu<0,\) then
-
ii.
the periodic form
$$\begin{aligned} \phi (\xi )=\frac{\sqrt{\lambda \,\mu }}{\lambda }\tan \Big (\sqrt{\lambda \,\mu }\,\xi +{{\xi }_{0}}\Big ), \end{aligned}$$(15)or,
$$\begin{aligned} \phi (\xi )=-\frac{\sqrt{\lambda \,\mu }}{\lambda }\cot \left( \sqrt{\lambda \,\mu }\,\xi +{{\xi }_{0}}\right) , \end{aligned}$$(16)
if \(\lambda\,\mu>0\), where \(\xi _{0}\) is a constant comes from the integration. Via using of Bernoulli equation Eq. 8, substituting Eq. 7 into Eq. 6, and equating each coefficients with the same power in the resulted polynomial of \(\phi (\xi )\) to zero, a system of algebraic equations in the variables \(\mu ,\,\lambda\) and \(B_{i}\)’s would be resulted. Solving this system and substituting the obtained values of \(\mu ,\,\lambda\) and \(B_{i}\)’s, along with the general solutions of Eq. 8, into Eq. 7 gives the exact analytic solution in travelling-wave form for Eq. 4. Repeating this process with replacing Eq. 8 by Eq. 12, new classes of solutions could be derived. The simplest equation scheme is applicable while the gotten algebraic system is solvable in the undetermined parameters.
3.2 The modified simple equation method
The MSEM (Jawad et al. 2010) proceeds by considering the solution of Eq. 6 as
where \(B_{i},\,(i=0,1,\cdots ,M)\) are parameters to be calculated afterwards. M is the positive integer that obtained by the homogeneous balance principle. \(\phi (\xi )\) is an unknown function to be subsequently defined. Substituting the assumed anstanz in Eq. 17 into Eq. 6, a system of algebraic-differential system would be deduced. Forcing numerator of the resulting system to be vanished, and putting back the results into Eq. 17 will complete the determination of exact solution for the considered problem.
4 Applications for Ito equation
In this part, we investigate the \((2+1)\)-dimensional non-local Ito equation Eq. 1 by applying the Kudryashov simple equation Algorithms that discussed in the previous section. Along Eq. 5 and Theorem 2.1, Eq. 2 will be carried into the following NODE
In more compact form, Eq. 18 can be written as
Integrating Eq. 19 twice with respect to \(\xi\) and setting the integration constants to be zeros gives the missing-v NODE
Let \(z(\xi )={v^{\prime }}(\xi )\) to get
Making balance between \(z^{\prime \prime }\) and \(z^{2}\) in Eq. 21 results \(M=2.\)
4.1 Using the SEM
Consequently, Eq. 21 owns the formal solution
Substituting Eq. 22 into Eq. 21, making use of the Bernoulli equation Eq. 8, and setting the coefficients of \(\phi ^{i}\),\(i=0,1,\cdots ,4\), to be zeros, gives the following simultaneous algebraic equations set in the sense of \(B_{0},\,B_{1},\,B_{2},\,\lambda ,\,\mu\) and \(\eta :\)
Solving Eqs. 23–27 implies \(B_{0}=0,\,B_{1}=\frac{1}{3}\big ( \eta -\alpha -\beta \big )\) and \(B_{2}=-2\mu ^{2},\) where \(\mu\) is nonzero constant. As a consequence, the following exact moving wave solutions from Eq. 1 can be obtained as:
Case 1 If \(B_{0}=0,\,\eta =\alpha +\beta\) and \(\lambda =0,\) we get \(B_{1}=0\) and
Case 2 If \(B_{0}=0,\,\eta =\alpha +\beta +\lambda ^{2},\) and \(B_{1}=-2\,\lambda \,\mu\), we get
Case 3 If \(B_{0}=\frac{1}{3}\left( \eta -\alpha -\beta \right) ,\,\eta =\alpha +\beta -\lambda ^{2}\) and \(B_{1}=-2\,\lambda \,\mu ,\) we get
We get the following system of algebraic equations, as in the case of the Bernoulli equation, and using the Riccati equation Eq. 12:
Eliminating the trivial solution, Eq. 33 and Eqs. 36–37 imply that \(B_{2}=-2\lambda ^{2},\,B_{1}=0\), and \(B_{0}=-\frac{1}{6}\big (\alpha +\beta -\eta +8\,\lambda \,\mu \big )\). The solutions can be classified as follows:
Case 4 If \(\eta =\alpha +\beta -4\lambda \mu\) and \(\lambda \,\mu <0\), we get
or,
Case 5 If \(\eta =\alpha +\beta +4\,\lambda \,\mu\), and \(\lambda \,\mu <0\), we get
or,
Case 6 If \(\eta =\alpha +\beta -4\,\lambda \,\mu\), and \(\lambda \,\mu >0\), we get
or,
Case 7 If \(\eta =\alpha +\beta +4\lambda \mu\) and \(\lambda \,\mu >0\), we get
or,
where \(\xi =x+y-\eta \,\frac{t^{\rho }}{\rho }.\)
4.2 Using the MSEM
By applying the MSEM for the Ito equation Eq. 2 with \(M=2,\) Eq. 21 gets the solution
It is simple to find that
Substituting Eqs. 47, 48 into Eq. 21 and equating the coefficients of \(\phi ^{-i}\,(i=0,\cdots ,4),\) to be vanished implies the algebraic-differential system:
The Eqs. 49–50 with \(B_{2}\ne 0\) and \({\phi }^{\prime }(\xi )\ne {0}\) to avoid trivial solution, yields \(B_{0}=0,\,B_{1}=\frac{1}{3}\big (\eta -\alpha -\beta \big )\) and \(B_{2}=-2\) respectively. Accordingly, solving Eq. 51 (or equivalently Eq. 52) with nonzero arbitrary constant \(B_{1}\), exact solutions for Eq. 1 are listed as follows:
Case 8 If \(B_{0}=0,\) \(\phi (\xi )=\frac{2{{e}^{\frac{B_{1} \,\xi }{2}}}\,}{B_{1}}{{\xi }_{1}}+{{\xi }_{2}}\) and \(\eta =\frac{1}{4}\big (B_{1}^{2}+4\alpha +4\beta \big ),\) we get
Case 9 If \(B_{0}=\frac{1}{3}\left( \eta -\alpha -\beta \right) ,\) \(\phi (\xi )=\frac{2\,{e^{\frac{B_{1}\,\xi }{2}}}\,}{{B_{1}}}{{\xi }_{1}}+{\xi _{2}}\) and \(\eta =\frac{1}{4}\left( -B_{1}^{2}+4\alpha +4\beta \right) ,\) we get
where \(\xi _{1}\) and \(\xi _{2}\) are the constants of integration and \(\xi =x+y-\eta \,\frac{t^{\rho }}{\rho }.\)

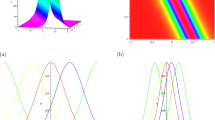
3D soliton profile of Eq. 31 in the xt-plane with \(\alpha =\beta =\lambda =1,\,\mu =-1\) and \(\xi _0=0\)

3D corresponding contour plots to the soliton profiles in Fig. 1

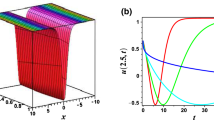
3D soliton profile of Eq. 40 in the xt-plane with \(\alpha =\beta =\mu =1,\,\lambda =-1\) and \(\xi _0=1.\)

3D corresponding contour plots to the soliton profiles in Fig. 3

3D soliton profile of Eq. 45 in the xt-plane with \(\alpha =\beta =\xi _0=1=1\) and \(\lambda =\mu =0.1.\)

3D corresponding contour plots to the soliton profiles in Fig. 5
5 Discussion and conclusion
In this work, the simple equation scheme (Kudryashov 2005a, b) and some of its variants developed by Jawad et al. (Az-Zo’bi 2019b) are successfully employed to analytically process the conformable time-fractional nonlinear \((2+1)\)-dimensional Ito equation (Eq. 1). Different types of travelling-wave solutions are formally extracted. The obtained solutions include one and multi-soliton wave solutions. The modified scheme outputs solutions of single soliton shapes coincide the obtained solutions in the SEM along Bernoulli equation with special choice of parameters. Some of these solutions are represented in Figs. 1, 2, 3, 4, 5, 6 for distinct values of the fractional order \(\rho .\) In Fig. 1, the xt-behavior of sound amplitude in soliton-like shape is shown for different fractional order. The corresponding Contour profiles are plotted in Fig. 2. In the same manner, singular kink-like (Eq. 40) are presented in Figs. 3, 4 while singular periodic sound amplitudes (Eq. 45) are illustrated in Figs. 5, 6 respectively. The order of derivative effect is clearly visible. Depending on the choice of free parameters, different physical structures could be suggested. As no researchers make consideration to solve time-fractional Ito equation, to the best of our knowledge, the solutions achieved throughout this paper are firstly presented and not published before. All of the obtained solutions are checked by replacing them back into the original equation. Because of the complexity of solving the NODEs result when applying the MSEM, as in Eq. 53, the results emphasize the effectiveness and powerful of the SEM. In general, the two methods are applicable to tackle several types of NLEEs with integer and fractional order derivatives.
References
Abdeljawad, T.: On conformable fractional calculus. J. Comput. Appl. Math. 279, 57–66 (2015)
Adem, A.R.: The generalized \((1+1)\)-dimensional and \((2+1)\)-dimensional Ito equations: multiple exp-function algorithm and multiple wave solutions. Comput. Math. Appl. 71(6), 1248–1258 (2016). https://doi.org/10.1016/j.camwa.2016.02.005
Ahmad, H., Seadawy, A.R., Khan, T.A., Thounthong, P.: Analytic approximate solutions for some nonlinear parabolic dynamical wave equations. J. Taibah Univ. Sci. 14(1), 346–358 (2020)
Akinyemi, L.: q-Homotopy analysis method for solving the seventh-order time-fractional Lax’s Korteweg–deVries and Sawada–Kotera equations. Comput. Appl. Math. 38, 1–22 (2019)
Akinyemi, L.: A fractional analysis of Noyes–Field model for the nonlinear Belousov–Zhabotinsky reaction. Comput. Appl. Math. 39, 1–34 (2020). https://doi.org/10.1007/s40314-020-01212-9
Akinyemi, L., Huseen, S.N.: A powerful approach to study the new modified coupled Korteweg–de Vries system. Math. Comput. Simul. 177, 556–567 (2020). https://doi.org/10.1016/j.matcom.2020.05.021
Akinyemi, L., Iyiola, O.S.: A reliable technique to study nonlinear time-fractional coupled Korteweg–de Vries equations. Adv. Differ. Equ. 169(2020), 1–27 (2020a). https://doi.org/10.1186/s13662-020-02625-w
Akinyemi, L., Iyiola, O.S.: Exact and approximate solutions of time-fractional models arising from physics via Shehu transform. Math. Methods Appl. Sci. 1–23, (2020b). https://doi.org/10.1002/mma.6484
Akinyemi, L., Iyiola, O.S., Akpan, U.: Iterative methods for solving fourth and sixth order time-fractional Cahn–Hillard equation. Math. Methods Appl. Sci. 43(7), 4050–4074 (2020). https://doi.org/10.1002/mma.6173
Akinyemi, L., Senol, M., Iyiola, O.S.: Exact solutions of the generalized multidimensional mathematical physics models via sub-equation method. Math. Comput. Simul. 182, 211–233 (2021). https://doi.org/10.1016/j.matcom.2020.10.017
Akram, G., Mahak, N.: Application of the first integral method for solving \((1+1)\)-dimensional cubicâ-quintic complex Ginzburg–Landau equation. Optik 164, 210–217 (2018). https://doi.org/10.1016/j.ijleo.2018.02.108
Al-Amr, M.O., El-Ganaini, S.: New exact traveling wave solutions of the \((4+1)\)-dimensional Fokas equation. Comput. Math. Appl. 74(6), 1274–1287 (2017). https://doi.org/10.1016/j.camwa.2017.06.020
Arnous, A.H., Zaka Ullah, M., Asma, M., Moshokoa, S.P., Zhou, Q., Mirzazadeh, M., Biswas, A., Belic, M.: Dark and singular dispersive optical solitons of Schrödinger–Hirota equation by modified simple equation method. Optik 136, 445–450 (2017). https://doi.org/10.1016/j.ijleo.2017.02.051
Arshad, M., Seadawy, A.R., Lu, D.: Elliptic function and solitary wave solutions of the higher-order nonlinear Schrdinger dynamical equation with fourth-order dispersion and cubic-quintic nonlinearity and its stability. Eur. Phys. J. Plus 132(8), 371 (2017a)
Arshad, M., Seadawy, A.R., Lu, D.: Modulation stability and optical soliton solutions of nonlinear Schrdinger equation with higher order dispersion and nonlinear terms and its applications. Superlatt. Microstruct. 112, 422–434 (2017b)
Az-Zo’bi, E.A.: Construction of solutions for mixed hyperbolic elliptic Riemann initial value system of conservation laws. Appl. Math. Model. 37(8), 6018–6024 (2013). https://doi.org/10.1016/j.apm.2012.12.006
Az-Zo’bi, E.A.: An approximate analytic solution for isentropic flow by an inviscid gas equations. Arch. Mech. 66(3), 203–212 (2014)
Az-Zo’bi, E.A.: On the reduced differential transform method and its application to the generalized Burgers–Huxley equation. Appl. Math. Sci. 8(177), 8823–8831 (2014)
Az-Zo’bi, E.A.: On the convergence of variational iteration method for solving systems of conservation laws. Trends Appl. Sci. Res. 10(3), 157–165 (2015). https://doi.org/10.3923/tasr.2015.157.165
Az-Zo’bi, E.A.: A reliable analytic study for higher-dimensional telegraph equation. J. Math. Comput. Sci. 18(4), 423–429 (2018)
Az-Zo’bi, E.A.: Exact analytic solutions for nonlinear diffusion equations via generalized residual power series method. Int. J. Math. Comput. Sci. 14(1), 69–78 (2019)
Az-Zo’bi, E.A.: Solitary and periodic exact solutions of the viscosity capillarity van der Waals gas equations. Appl. Appl. Math. Int. J. 14(1), 349–358 (2019)
Az-Zo’bi, E.A.: Peakon and solitary wave solutions for the modified Fornberg–Whitham equation using simplest equation method. Int. J. Math. Comput. Sci. 14(3), 635–645 (2019a)
Az-Zo’bi, E.A.: New kink solutions for the van der Waals p-system. Math. Methodes Appl. Sci. 42(18), 1–11 (2019b). https://doi.org/10.1002/mma.5717
Az-Zo’bi, E.A., Al-Dawoud, K., Marashdeh, M.: Numeric-analytic solutions of mixed-type systems of balance laws. Appl. Math. Comput. 265, 133–143 (2015). https://doi.org/10.1016/j.amc.2015.04.119
Az-Zo’bi, E.A., Al-Khaled, K.: A new convergence proof of the Adomian decomposition method for a mixed hyperbolic elliptic system of conservation laws. Appl. Math. Comput. 217(8), 4248–4256 (2010)
Az-Zo’bi, E.A., Al-Khaled, K., Darweesh, A.: Numeric-analytic solutions for nonlinear oscillators via the modified multi-stage decomposition method. Mathematics 7(6), 1–13 (2019). https://doi.org/10.3390/math7060550
Az-Zo’bi, E.A., Yildirim, A., AlZoubi, W.A.: The residual power series method for the one-dimensional unsteady flow of a van der Waals gas. Phys. A Stat. Mech. Appl. 517, 188–196 (2019). https://doi.org/10.1016/j.physa.2018.11.030
Az-Zo’bi, E.A., Al-Amr, M.O., Yildirim, A., Al-Zoubi, W.A.: Revised reduced differential transform method using Adomian’s polynomials with convergence analysis. Nonlinear Studies (2020); Accepted
Bhrawy, A.H., Alhuthali, M.S., Abdelkawy, M.A.: New solutions for \((1+1)\)-dimensional and \((2+1)\)-dimensional Ito equations. Math. Probl. Eng. 2012, 1–24 (2012). https://doi.org/10.1155/2012/537930
Biondini, G., Fagerstrom, E., Prinari, B.: Inverse scattering transform for the defocusing nonlinear Schrödinger equation with fully asymmetric non-zero boundary conditions. Phys. D Nonlinear Phenom. 333, 117–136 (2016). https://doi.org/10.1016/j.physd.2016.04.003
Ebadi, G., Kara, A.H., Petkovic, M.D., Yildirim, A., Biswas, A.: Solitons and conserved quantities of the Ito equation. Proc. Roman. Acad. Ser. A 13(3), 215–224 (2012)
Farah, N., Seadawy, A.R., Ahmad, S., Rizvi, S.T.R., Younis, M.: Interaction properties of soliton molecules and Painleve analysis for nano bioelectronics transmission model. Opt. Quantum Electron. 52(7), 1–15 (2020)
Gu, C.H., Hu, H.S., Zhou, Z.X.: Darboux Transformation in Soliton Theory and Its Geometric Applications. Shanghai Scientific and Technical Publishers, Shanghai (1999). https://doi.org/10.4236/am.2016.715150
He, C., Tang, Y., Ma, W.X., Ma, J.: Interaction phenomena between a lump and other multi-solitons for the \((2+1)\)-dimensional BLMP and Ito equations. Nonlinear Dyn. 95, 29–42 (2019). https://doi.org/10.1007/s11071-018-4548-8
Helal, M.A., Seadawy, A.R., Zekry, M.H.: Stability analysis of solitary wave solutions for the fourth-order nonlinear Boussinesq water wave equation. Appl. Math. Comput. 232, 1094–1103 (2014)
Hirota, R.: The Direct Method in Soliton Theory, Cambridge Tracts in Mathematics, vol. 155. Cambridge University Press, Cambridge (2004)
Hossain, A.K.M., Akbar, M.A., Hossain, M.J., Rahman, M.M.: Closed form wave solution of nonlinear equations by modified simple equation method. Res. J. Opt. Photon. 2(1), 1–5 (2018)
Iqbal, M., Seadawy, A.R., Khalil, O.H., Lu, D.: Propagation of long internal waves in density stratified ocean for the (2+ 1)-dimensional nonlinear Nizhnik–Novikov–Vesselov dynamical equation. Res. Phys. 16, 102838 (2020)
Irshad, A., Mohyud-Din, S.T., Ahmed, N., Khan, U.: A new modification in simple equation method and its applications on nonlinear equations of physical nature. Res. Phys. 7, 4232–4240 (2017). https://doi.org/10.1016/j.rinp.2017.10.048
Islama, M.T., Akbar, M.A., Azad, M.A.: Closed-form travelling wave solutions to the nonlinear space-time fractional coupled Burgers’ equation. Arab J. Basic Appl. Sci. 26(1), 1–11 (2019)
Ito, M.: An extension of nonlinear evolution equations of the K-dv (mK-dv) type to higher orders. J. Phys. Soc. Jpn. 49(2), 771–778 (1980). https://doi.org/10.1143/JPSJ.49.771
Jawad, A.J., Petkovic, M.D., Biswas, A.: Modified simple equation method for nonlinear evolution equations. Appl. Math. Comput. 217(2), 869–877 (2010). https://doi.org/10.1016/j.amc.2010.06.030
Khalil, R., Al Horani, M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014). https://doi.org/10.1016/j.cam.2014.01.002
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. North-Holland Mathematics Studies (Volume 204), 1st edn. Elsevier, Netherlands (2006)
Korpinar, Z., Tchier, F., Inc, M., Alorini, A.A.: On exact solutions for the stochastic time fractional Gardner equation. Phys. Script. 95(4), 1–13 (2020)
Kudryashov, N.A.: Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fractals 24(5), 1217–1231 (2005a). https://doi.org/10.1016/j.chaos.2004.09.109
Kudryashov, N.A.: Exact solitary waves of the Fisher equation. Phys. Lett. A 342(1–2), 99–106 (2005b). https://doi.org/10.1016/j.physleta.2005.05.025
Kurt, A., Atilgan, E., Senol, M., Tasbozan, O., Baleanu, D.: New travelling wave solutions for time-space fractional equations arising in nonlinear optics. J. Fract. Calc. Appl. 11(1), 138–144 (2020)
Li, D.L., Zhao, J.X.: New exact solutions to the \((2+1)\)-dimensional Ito equation: extended homoclinic test technique. Appl. Math. Comput. 215(5), 1968–1974 (2009). https://doi.org/10.1016/j.amc.2009.07.058
Lu, D., Seadawy, A.R., Ali, A.: Dispersive traveling wave solutions of the equal-width and modified equal-width equations via mathematical methods and its applications. Res. Phys. 9, 313–320 (2018)
Ma, W.X., Yong, X.L., Zhang, H.Q.: Diversity of interaction solutions to the \((2+1)\)-dimensional Ito equation. Comput. Math. Appl. 75(1), 289–295 (2018). https://doi.org/10.1016/j.camwa.2017.09.013
Odabas, M.: Traveling wave solutions of conformable time-fractional Zakharov–Kuznetsov and Zoomeron equations. Chin. J. Phys. 64, 194–202 (2020)
Olver, P.J.: Applications of Lie Groups to Differential Equations, Graduate Texts in Mathematics, vol. 107, 1st edn. Springer, New York (1993). https://doi.org/10.1007/978-1-4684-0274-2
Osman, M.S., Rezazadeh, H., Eslami, M.: Traveling wave solutions for \((3+1)\) dimensional conformable fractional Zakharov–Kuznetsov equation with power law nonlinearity. Nonlinear Eng. 8, 559–567 (2019)
Owusu-Mensah, I., Akinyemi, L., Oduro, B., Iyiola, O.S.: A fractional order approach to modeling and simulations of the novel COVID-19. Adv. Differ. Equ. 2020(1), 1–21 (2020). https://doi.org/10.1186/s13662-020-03141-7
Ozis, T., Aslan, I.: Exact and explicit solutions to the \((3+1)\)-dimensional JimboMiwa equation via the Exp-function method. Phys. Lett. A 372(47), 7011–7015 (2018). https://doi.org/10.1016/j.physleta.2008.10.014
Rady, A.S.A., Osman, E.S., Khalfallah, M.: The homogeneous balance method and its application to the Benjamin–Bona–Mahoney (BBM) equation. Appl. Math. Comput. 217(4), 1385–1390 (2010). https://doi.org/10.1016/j.amc.2009.05.027
Seadawy, A.R., El-Rashidy, K.: Dispersive solitary wave solutions of Kadomtsev–Petviashvili and modified Kadomtsev–Petviashvili dynamical equations in unmagnetized dust plasma. Res. Phys. 8, 1216–1222 (2018)
Seadawy, A.R., Iqbal, M., Lu, D.: Nonlinear wave solutions of the Kudryashov–Sinelshchikov dynamical equation in mixtures liquid-gas bubbles under the consideration of heat transfer and viscosity. J. Taibah Univ. Sci. 13(1), 1060–1072 (2019)
Seadawy, A.R., Lu, D., Nasreen, N.: Construction of solitary wave solutions of some nonlinear dynamical system arising in nonlinear water wave models. Ind. J. Phys. 94(11), 1785–1794 (2020)
Senol, M.: Analytical and approximate solutions of \((2+1)\)-dimensional time-fractional Burgers–Kadomtsev–Petviashvili equation. Commun. Theor. Phys. 72, 1–11 (2020)
Senol, M., Iyiola, O.S., Daei Kasmaei, H., Akinyemi, L.: Efficient analytical techniques for solving time-fractional nonlinear coupled Jaulent–Miodek system with energy-dependent Schrödinger potential. Adv. Differ. Equ. 2019, 1–21 (2019)
Song, M., Yang, C.X.: Exact traveling wave solutions of the Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation. Appl. Math. Comput. 216(11), 3234–3243 (2010). https://doi.org/10.1016/j.amc.2010.04.048
Vitanov, N.K.: Modified method of simplest equation for obtaining exact solutions of nonlinear partial differential equations: history, recent developments of the methodology and studied classes of equations. J. Theor. Appl. Mech. 49(2), 107–122 (2019)
Wang, M., Li, X.: Applications of F-expansion to periodic wave solutions for a new Hamiltonian amplitude equation. Chaos Solitons Fractals 24(5), 1257–1268 (2005). https://doi.org/10.1016/j.chaos.2004.09.044
Wang, M.L., Li, X.Z., Zhang, J.L.: The -expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 372(4), 417–423 (2008). https://doi.org/10.1016/j.physleta.2007.07.051
Wazwaz, A.M.: Multiple-soliton solutions for the generalized \((1 + 1)\)-dimensional and the generalized \((2 + 1)\)-dimensional Ito equations. Appl. Math. Comput. 202(2), 840–849 (2008). https://doi.org/10.1016/j.amc.2008.03.029
Wazwaz, A.M.: Partial Differential Equations and Solitary Waves Theory. Higher Education Press, Springer, Berlin (2009). https://doi.org/10.1007/978-3-642-00251-9
Yang, J.Y., Ma, W.X., Qin, Z.Y.: Lump and lump-soliton solutions to the \((2+1)\)-dimensional Ito equation. Anal. Math. Phys. 8, 427–436 (2018). https://doi.org/10.1007/s13324-017-0181-9
Yildirim, Y., Yasar, E.: Wronskian solutions of \((2+1)\) dimensional non-local Ito equation. Commun. Faculty Sci. Univ. Ankara Ser. A1-Math. Stat. 67(2), 126–138 (2018)
Zayed, E.M.E., Al-Nowehy, A.G., Elshater, M.E.M.: Solitons and other solutions for coupled nonlinear Schrödinger equations using three different techniques. Pramana-J. Phys. 9296, 1–8 (2019). https://doi.org/10.1007/s12043-019-1762-y
Zhu, W., Xia, Y., Zhang, B., Bai, Y.: Exact traveling wave solutions and bifurcations of the time-fractional differential equations with applications. Int. J. Bifurc. Chaos 29(3), 1–24 (2019)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Az-Zo’bi, E.A., AlZoubi, W.A., Akinyemi, L. et al. Abundant closed-form solitons for time-fractional integro–differential equation in fluid dynamics. Opt Quant Electron 53, 132 (2021). https://doi.org/10.1007/s11082-021-02782-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-021-02782-6