
Abstract
This research presents new soliton structures to some time-fractional nonlinear differential equations (TFNDEs) with conformable derivative. The powerful Ricatti–Bernoulli (RB) sub-ODE method is used to carry out the soliton solutions. Some of the obtained solutions include trigonometric, periodic wave and hyperbolic solutions. The constraint conditions for the existence of solitons are also presented. The RB sub-ODE method proves to be efficient and effective for the extraction of soliton structures for different types of TFNDEs. Some interesting figures for the numerical simulation of the obtained results are presented.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Fractional partial differential equations (FPDEs) appear in different field of science and engineering such as physics, biology, rheology, viscoelasticity, control theory, signal processing, systems identification and electrochemistry (Oldham and Spanier 1974; Miller and Ross 1993; Samko et al. 1993; Kiryakova 1994; Baleanu et al. 2017, 2018a, b; Inc et al. 2018). In order to describe nonlinear physical phenomena, obtaining exact solutions for nonlinear FPDEs is one of the most important aspect. This physical phenomenon may depend on both the time instant and the time history, which can be successfully modelled using the theory of derivatives and integrals of fractional order (Oldham and Spanier 1974; Miller and Ross 1993; Samko et al. 1993; Kiryakova 1994; Baleanu et al. 2017, 2018a, b; Inc et al. 2018). Recently, several methods have been applied to reach exact solutions of FPDEs in the literature. Among the techniques applied are the exp-function, fractional sub-equation, first integral, the \(G^{\prime} /G\)-expansion, Lie symmetry and many more (Eslami et al. 2016; Zhou et al. 2016; Mirzazadeh et al. 2014; Sonomezoglu et al. 2016; Islam et al. 2017; Ali et al. 2016; Cheema and Younis 2016a, b; Arnous et al. 2017; Sardar et al. 2015; Hosseini et al. 2017a, b, c, d; Korkmaz and Hosseini 2017; Younis 2017; Younis et al. 2017; Younis and Rizvi 2016; Sahar et al. 2017; Kalim and Younis 2017; Rizvi et al. 2017).
2 Conformable derivative
Recently, newly established definition of fractional derivative was introduced in (Abu Hammad and Khalil 2014; Khalil et al. 2014) and it is called conformable derivative. This definition gets rid of the deficiencies of the existing definitions.
Definition 1
Let \(f:\left( {0,\infty } \right) \to {\mathbb{R}}\), the conformable derivative of \(f\) of order \(\alpha\) is defined as
for \(t > 0,\alpha \in \left( {0,1} \right)\). Conformable derivative has the following properties (Abu Hammad and Khalil 2014; Khalil et al. 2014; Abdeljawad 2015):
-
1.
\(T_{\alpha } \left( {{\text{af}} + {\text{bg}}} \right) = {\text{a}}T_{\alpha } (f) + {\text{b}}T_{\alpha } ({\text{g}}),\;a,b \in {\mathbb{R}}\)
-
2.
\(T_{\alpha } \left( {t^{\mu } } \right) = \mu \cdot t^{\mu - \alpha } ,\;\mu \in {\mathbb{R}}\)
-
3.
\(T_{\alpha } \left( {\text{fg}} \right) = {\text{g}} T_{\alpha } \left( {\text{f}} \right) + {\text{f}} T_{\alpha } ({\text{g}}),\)
-
4.
\(T_{\alpha } \left( {\frac{{{\text{f}} }}{\text{g}}} \right) = \frac{{{\text{g}} T_{\alpha } \left( {\text{f}} \right) - {\text{f}}\; T_{\alpha } \left( {\text{g}} \right) }}{{g^{2} }},\)
-
5.
If \(f\) is differentiable, then \(T_{\alpha } \left( {\text{f}} \right)\left( {\text{t}} \right) = t^{1 - \alpha } \left( {\frac{\text{df }}{\text{dg}}} \right).\)
Theorem 1
Let \(f:\left( {0,\infty } \right) \to {\mathbb{R}}\) be a function such that \(f\) is differentiable and also \(\alpha\) differentiable. Let \(g\) be differentiable defined in the range of \(f\) and also differentiable, the we have then rule (Abdeljawad 2015) \(T_{\alpha } \left( {fog} \right)\left( t \right) = t^{1 - \alpha } g^{\prime} \left( t \right)f^{\prime} \left( {g\left( t \right)} \right).\)
3 Description of the method
Here, we present the procedure of the RB sub-ODE method (Yang et al. 2015) and the main steps
3.1 RB sub-ODE method
Consider a NLPDETFNDEs as follows,
where \(P\) is in general a polynomial function of its arguments, the subscripts denote the partial derivatives. The RB sub-ODE method consists of three steps.
-
Step 1 Convert \(x\) and \(t\) to one variable as follows
$$p\left( {x,t} \right) = p\left( \xi \right),$$(3)and
$$\xi = k\left( {x + l\left( {\frac{{t^{\alpha } }}{\alpha }} \right)} \right),$$(4)where the localized wave solution \(p\left( \xi \right)\) travels with speed \(l\), by using Eqs. (3) and (4), one can transform Eq. (2) to an ODE
$$P\left( {p,p^{\prime} ,p^{\prime\prime},p^{\prime\prime\prime}, \ldots } \right) = 0.$$(5) -
Step 2 Assume that Eq. (5) is the solution of the RB equation
$$p^{\prime} = ap^{2 - m} + bp + cp^{m} .$$(6)
In Eq. (6), \(a\), \(b\), \(c\), and \(m\) are constants and will be found later. Taking the second and third derivatives of Eq. (6) yields
One can obtain the solutions for Eq. (6) in the following forms:
Case 1 When \(m = 1\), the solution of Eq. (6) is
Case 2 When \(m \ne 1\), \(b = 0\), and \(c = 0\), the solution of Eq. (6) is
Case 3 When \(m \ne 1\), \(b \ne 0\), and \(c = 0\), the solution of Eq. (6) is
Case 4 When \(m \ne 1\), \(a \ne 0\), and \(b^{2} - 4ac < 0\), the solution of Eq. (6) is
and
Case 5 When \(m \ne 1\), \(a \ne 0\), and \(b^{2} - 4ac > 0\), the solution of Eq. (6) is
and
Case 6 When \(m \ne 1\), \(a \ne 0\), and \(b^{2} - 4ac = 0\), the solution of Eq. (6) is
where \(C\) represents an arbitrary constant.
-
Step 3 Putting the derivatives of \(q\) in Eq. (5) gives an algebraic equation of \(q\). Setting the highest power exponents of \(q\) to their equivalence in Eq. (5), \(m\) is obtained. Comparing the coefficients of \(q_{i}\) gives a set of algebraic equations that includes \(a\), \(b\), \(c\), and \(V\). Finding the solutions of the obtained sets of algebraic equations and putting \(m\), \(a\), \(b\), \(c\), \(l\), and \(\xi = k\left( {x + l\left( {\frac{{t^{\alpha } }}{\alpha }} \right)} \right)\) into Eqs. (9)–(16), a soliton solutions can be obtained for Eqs. (2).
3.2 Bäcklund transformation of the RB equation
When \(p_{n - 1} \left( \xi \right)\) and \(p_{n} \left( \xi \right) = p_{n} \left( {p_{n - 1} \left( \xi \right)} \right)\) represent the solutions of Eq. (6)
namely
Taking the integral of the above equation one time with respect to \(\xi\) and solving it, we have
where \(A_{1}\) and \(A_{2}\) are arbitrary constants. Equation (19) is the Bäcklund transformation of Eq. (6). If we obtain a solution of Eq. (6), we can find new infinite sequence of solutions of Eq. (6) by using Eq. (19).
4 Applications
In this section, the soliton structures for some TFNDEs are analyzed and investigated.
4.1 Time-fractional coupled Boussinesq equations with conformable derivative
The time-fractional coupled Boussinesq equations (Hosseini et al. 2017; Hosseini and Ansari 2017; Kheir et al. 2013) is given by
where \((0 < \alpha \le 1)\) is a parameter describing the order of the fractional time derivative. Using the transformation
where \(\xi = x - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right),\) Eq. (20) is reduces to the following systems of ODE
Substituting Eqs. (6) and (7) into Eq. (22), we have
Setting \(m = 0\) in Eq. (23), we obtain
Setting each of the coefficients of \(p^{i} \left( {i = 0,1,2,3,4} \right)\), we get the following algebraic systems:
Solving Eqs. (25)–(32), we obtain the following sets of results
Result 1
\(c_{2} = 0,\;c_{1} = 0,\;a_{1} \ne 0,\;b_{2} = \frac{{a_{2} b_{1} }}{{a_{1} }},b_{1} \ne 0,\;\beta = - \frac{{a_{2}^{2} }}{{a_{1}^{2} b_{1}^{2} }},\gamma = 6\beta a_{1} ,\;l = \frac{{a_{2} }}{{a_{1} }}.\)
This result produces the following soliton solutions
Result 2
\(c_{1} \ne 0,\,a_{2} = \frac{{a_{1} c_{2} }}{{c_{1} }},\;a_{1} \ne 0,\;b_{2} = \frac{{a_{2} b_{1} }}{{a_{1} }},\; - b_{1}^{2} + 4a_{1} c_{1} \ne 0,\beta = \frac{{a_{2}^{2} }}{{a_{1}^{2} \left( { - b_{1}^{2} + 4a_{1} c_{1} } \right)}},\;\gamma = 6\beta a_{1} ,\,l = \frac{{a_{2} }}{{a_{1} }}\). This result produces the following solution
provided that \(4a_{1} c_{1} - b_{1}^{2} > 0,\) and \(\frac{{4a_{1}^{3} c_{1}^{2} - a_{2}^{2} c_{1} b_{1}^{2} }}{{a_{1}^{2} c_{1} }} > 0,\) respectively.
provided that \(4a_{1} c_{1} - b_{1}^{2} > 0,\) and \(\frac{{4a_{1}^{3} c_{1}^{2} - a_{2}^{2} c_{1} b_{1}^{2} }}{{a_{1}^{2} c_{1} }} > 0,\) respectively.
provided that \(b_{1}^{2} - 4a_{1} c_{1} > 0,\) and \(\frac{{4a_{1}^{3} c_{1}^{2} - a_{2}^{2} c_{1} b_{1}^{2} }}{{a_{1}^{2} c_{1} }} > 0,\) respectively.
provided that \(b_{1}^{2} - 4a_{1} c_{1} > 0,\) \(\frac{{4a_{1}^{3} c_{1}^{2} - a_{2}^{2} c_{1} b_{1}^{2} }}{{a_{1}^{2} c_{1} }} > 0,\) respectively.
4.2 Time-fractional Cahn–Allen equation with conformable derivative
The time-fractional Cahn–Allen equation (Hosseini et al. 2017; Esen et al. 2013; Rawashdeh 2017) is given by
where \((0 < \alpha \le 1)\) is a parameter describing the order of the fractional time derivative. Using the transformation
we can reduce Eq. (49) to the following ODE
Substituting Eqs. (6) and (7) into (51), we obtain
Setting \(m = 0\) in Eq (52), we get
Setting each of the coefficients of \(p^{i} \left( {i = 0,1,2,3,4} \right)\), we get the following algebraic systems:
Solving Eq. (54)–(57), we have the following
-
\(b = \pm a,\;c = 0,\;a \ne 0,\;l = - \frac{3b}{{2a^{2} }},\;k = \pm \frac{\sqrt 2 l}{3}\), which produces
$$u_{9} \left( {x,t} \right) = \left( {\frac{1}{2} + \frac{1}{2}\tan \left[ {\frac{1}{2}\sqrt a \left( {\frac{3b\sqrt 2 }{{6a^{2} }}x - \frac{{3bt^{\alpha } }}{{2a^{2} \alpha }} + C} \right)} \right]} \right),$$(58)$$u_{10} \left( {x,t} \right) = \left( {\frac{1}{2} - \frac{1}{2}\cot \left[ {\frac{1}{2}\sqrt a \left( {\frac{3b\sqrt 2 }{{6a^{2} }}x - \frac{{3bt^{\alpha } }}{{2a^{2} \alpha }} + C} \right)} \right]} \right).$$(59)$$u_{11} \left( {x,t} \right) = \left( {\frac{1}{2} - \frac{1}{2}\coth \left[ {\frac{1}{2}\sqrt a \left( {\frac{3b\sqrt 2 }{{6a^{2} }}x - \frac{{3bt^{\alpha } }}{{2a^{2} \alpha }}} \right) + C} \right)]} \right),$$(60)$$u_{12} \left( {x,t} \right) = \left( {\frac{1}{2} - \frac{1}{2}{ \tanh }\left[ {\frac{1}{2}\sqrt a \left( {\frac{3b\sqrt 2 }{{6a^{2} }}x - \frac{{3bt^{\alpha } }}{{2a^{2} \alpha }} + C} \right)} \right]} \right),$$(61)provided that \(a > 0.\)
4.3 Time-fractional biological reaction–convection–diffusion model equations with conformable derivative
Consider the following time-fractional reaction–convection–diffusion equation as follows:
where \(\lambda ,\lambda_{0} ,\lambda_{1} ,\lambda_{2} ,\) and \(\lambda_{3}\) are real constants (Javadi et al. 2013). Setting \(\lambda = 1\) and \(\lambda_{0} = 0\), the equation turns to the form of the time-fractional Murray (Yildirim and Pinar 2010) equation
which is also a generalization of fishers equation when \(\lambda_{1} = 0\), where \((0 < \alpha \le 1)\) is a parameter describing the order of the fractional time derivative. When \(\lambda_{2} = \lambda_{3} = 0 {\text{and }}\alpha = 1\), the equation turns to the classical Burgers equation. By using the transformation in Eq. (50), one can reduces Eq. (63) to
Substituting Eqs. (6) and (7) into (64), we obtain
Setting \(m = 0\) in Eq (65), we get
Setting each of the coefficients of \(p^{i} \left( {i = 0,1,2,3} \right)\), we get the following algebraic systems:
Solving Eq. (67) to (70), we have the following
-
\(\lambda_{1}^{2} \lambda_{2} + 4\lambda_{3}^{2} \ne \, 0, \, k = \frac{{2 l \lambda_{1} \lambda_{3} }}{{\lambda_{1}^{2} \lambda_{2} + 4\lambda_{3}^{2} }}, \, a = - \frac{{\lambda_{1} }}{2k}, \, \lambda_{1} \ne 0, \, b = - \frac{{2\left( {a l + \lambda_{3} } \right)}}{{k\lambda_{1} }}, \, c = 0\), which produces
$$u_{13} \left( {x,t} \right) = \left( - \frac{{\lambda_{1}^{2} l}}{{2\left( {2k\lambda_{3} - \lambda_{1} } \right)}} + Ce^{{\frac{{2\left( {al + \lambda_{3} } \right)}}{{k\lambda_{1} }}\left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right)} \right)}} \right)^{ - 1} .$$(71)$$u_{14} \left( {x,t} \right) = - \frac{{4\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }} + \frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }}{ \tan }\left( {\frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{k\lambda_{1} }}\left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right) + C} \right)} \right),$$(72)and
$$u_{15} \left( {x,t} \right) = - \frac{{4\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }} - \frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }}{ \cot }\left( {\frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{k\lambda_{1} }}\left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right) + C} \right)} \right),$$(73)$$u_{16} \left( {x,t} \right) = - \frac{{4\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }} + \frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }}{ \coth }\left( {\frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{k\lambda_{1} }}\left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right) + C} \right)} \right),$$(74)and
$$u_{17} \left( {x,t} \right) = - \frac{{4\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }} + \frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }}{ \tanh }\left( {\frac{{\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{k\lambda_{1} }}\left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right) + C} \right)} \right),$$(75)$$u_{18} \left( {x,t} \right) = \left( {\frac{2k}{{\lambda_{1} \left( {kx - l\left( {\frac{{t^{\alpha } }}{\alpha }} \right) + C} \right)}} + \frac{{4\left( {2k\lambda_{3} - \lambda_{1} l} \right)}}{{\lambda_{1}^{2} }}} \right).$$(76)
5 Numerical simulation
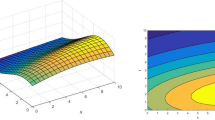
Herein, we present some three dimensional and two dimensional plots of some of the obtained results (see Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10). The construction of the Figures is carried out by taking suitable values of the parameters in order to see the mechanism of the original equations. From the Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 below, one can see that, the obtained solutions possess solutions such as periodic wave, bell-shaped, kink-type and singular soliton solutions.

Three and two dimensional plots for solution (33) with \(a_{1} = 1\), \(a_{2} = 1.9\), \(b_{1} = c_{1} = 12\), \(\alpha = 0.5\)

Three and two dimentional plots for solution (34) with \(a_{1} = 5\), \(a_{2} = 3.9\), \(b_{1} = c_{1} = 2\), \(\alpha = 0.95\)

Three and two dimentional plots for solution (39) with \(a_{1} = 10\), \(a_{2} = 1\), \(b_{1} = c_{1} = 2\), \(\alpha = 0.8\)

Three and two dimensional plots for solution (40) with \(a_{1} = 10\), \(a_{2} = 1\), \(b_{1} = c_{1} = 2\), \(\alpha = 0.8\)

Three and two dimensional plots for (45) with \(a_{1} = 5\), \(a_{2} = 12\), \(b_{1} = c_{1} = 4\), \(\alpha = 0.8\)

Three and two dimentional plots for solution (46) with \(a_{1} = 4\), \(a_{2} = 1\), \(b_{1} = c_{1} = 4\), \(\alpha = 0.5\)

Three and two dimentional plots for solution (47) with \(a_{1} = 4\), \(a_{2} = 1\), \(b_{1} = c_{1} = 4\), \(\alpha = 0.5\)

Three and two dimentional plots for solution (48) with \(a_{1} = 4\), \(a_{2} = 1\), \(b_{1} = c_{1} = 4\), \(\alpha = 0.5\)

Three and two dimentional plots for solution (60) with \(a = 1,b = 0.5,\alpha = 0.5\)

Three and two dimensional plots for solution (61) with \(a = b = 10\), \(\alpha = 0.5\)
6 Concluding remarks
This research presented soliton structures to some TFNDEs with conformable derivative. The powerful RB sub-ODE method was used to carry out the soliton solutions. Some of the obtained solutions include trigonometric, periodic wave and hyperpolic solutions. The constraint conditions were also presented. The RB sub-ODE method proved to be efficient and effective for the extraction of soliton structures for different types of TFNDEs. The obtained soliton solutions can be used for the interpretation of some physical phynomena in mathematical physics. Some interesting figures for the obtained solutions were presented in Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10.
References
Abdeljawad, T.: On conformable fractional calculus. J. Comput. Appl. Math. 279(1), 57–66 (2015)
Abu Hammad, M., Khalil, R.: Conformable fractional heat differential equation. Int. J. Pure. Appl. Math. 94(2), 215–221 (2014)
Ali, S., Rizvi, S.T.R., Younis, M.: Travelling wave solutions for nonlinear dispersive waterwave systems with time-dependent coefficients. Nonlinear Dyn. 82(4), 1755–1762 (2016)
Arnous, A.H., Mahmood, S.A., Younis, M.: Dynamics of optical solutions in dual-core fibers via two intgration schemes. Superlattice Microstruct. 106, 156–162 (2017)
Baleanu, D., Inc, M., Yusuf, A., Aliyu, A.I.: Lie symmetry analysis, exact solutions and conservation laws for the time fractional modified Zakharov–Kuznetsov equation. Nonlinear Anal Model Control 22(6), 861–876 (2017)
Baleanu, D., Inc, M., Yusuf, A., Aliyu, A.I.: Time fractional third-order evolution equation: symmetry analysis, explicit solutions, and conservation laws. J. Comput. Nonlinear Dyn. 13, 021011 (2018a). https://doi.org/10.1115/1.4037765
Baleanu, D., Inc, M., Yusuf, A., Aliyu, A.I.: Lie symmetry analysis, exact solutions and conservation laws for the time fractional Caudrey–Dodd–Gibbon–Sawada–Kotera equation. Commun. Nonlinear Sci. Numer. Simul. 59, 222–234 (2018b)
Cheema, N., Younis, M.: New and more exact travelling wave solutions to integrable (2 + 1)-dimensional Maccari system. Nonlinear Dyn. 83(3), 1395–1401 (2016a)
Cheema, N., Younis, M.: New and more general traveling wave solutions for nonlinear Schrodinger equation. Waves Random Complex Media 26(1), 84–91 (2016b)
Esen, A., Yagmurlu, N.M., Tasbozan, O.: Approximate analytical solution to time-fractional damped burger and Cahn–Allen equations. Appl. Math. Inf. Sci. 7(5), 1951–1956 (2013)
Eslami, M., Zhou, Q., Moshokoa, S.P., Biswas, A., Belic, M., Ekici, M., Mirzazadeh, M.: Optical soliton pertubation with fractional temporal evolution by first integral method with conformabal fractional derivatives. Optik 127(22), 10659–10669 (2016)
Hosseini, K., Ansari, R.: New exact solutions of nonlinear conformable time-fractional Boussinesq equations using the modified Kudryashov method. Waves Random Complex Media (2017). https://doi.org/10.1080/17455030.2017.1296983
Hosseini, K., Bekir, A., Kaplan, M., Güner, Ö.: On a new technique for solving the nonlinear conformable time-fractional differential equations. Opt. Quantum Electron. 49, 343 (2017a). https://doi.org/10.1007/s11082-017-1178-1
Hosseini, K., Mayeli, P., Ansari, Reza: Bright and singular soliton solutions of the conformable time-fractional Klein–Gordon equations with different nonlinearities. Waves Random Complex Media (2017b). https://doi.org/10.1080/17455030.2017.1362133
Hosseini, K., Ayati, Z., Ansari, R.: New exact traveling wave solutions of the Tzitzéica type equations using a novel exponential rational function method. Optik 130, 737–742 (2017c)
Hosseini, K., Xu, Y.J., Mayeli, P., Bekir, A., Yao, P., Zhou, Q., Güner, Ö.: A study on the conformable time-fractional Klein–Gordon equations with quadratic and cubic nonlinearities. Optoelectron. Adv. Mater. Rapid Commun. 11, 423–429 (2017d)
Hosseini, K., Bekir, A., Ansari, R.: Exact solutions of nonlinear conformable time-fractional Boussinesq equations using the exp(− ϕ(ξ))-expansion method. Opt. Quantum Electron. 49, 131 (2017e). https://doi.org/10.1007/s11082-017-0968-9
Hosseini, K., Bekir, A., Ansari, R.: New exact solutions of the conformable time-fractional Cahn–Allen and Cahn–Hilliard equations using the modified Kudryashov method. Optik (2017f). https://doi.org/10.1016/j.ijleo.2016.12.032
Inc, M., Yusuf, A., Aliyu, A.I., Baleanu, D.: Time-fractional Cahn–Allen and time-fractional Klein–Gordon equations: lie symmetry analysis, explicit solutions and convergence analysis. Phys. A 493, 94–106 (2018)
Islam, W., Rehman, H., Younis, M.: Weakly nonlocal single and combined solitons in nonlinear optics with cubic quintic nonlinearities. J. Nanoelectron. Optoelectron. 12(9), 1008–1012 (2017)
Javadi, Sh, Miri, M., Karbasaki, M., Jani, M.: Traveling wave solutions of a biological reaction-convection-diffusion equation model by using (G′/G)-expansion method. Commun. Numer. Anal. 2013, 1–5 (2013)
Kalim, T.U., Younis, M.: Bright, dark and other optical solitons with second order spatiotemporal dispersion. Optic 142, 446–450 (2017)
Khalil, R., Horani, A.L.M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014)
Kheir, H., Jabbari, A., Yildirim, A., Alomari, A.K.: He’s semi-inverse method for soliton solutions of Boussinesq system. World J. Model. Simul. 9, 3–13 (2013)
Kiryakova, V.: Generalised Fractional Calculus and Applications. Pitman Research Notes in Mathematics, vol. 301. Longman, London (1994)
Korkmaz, A., Hosseini, K.: Exact solutions of a nonlinear conformable time-fractional parabolic equation with exponential nonlinearity using reliable methods. Opt. Quantum Electron. 49, 278 (2017). https://doi.org/10.1007/s11082-017-1116-2
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Mirzazadeh, M., Eslami, M., Vajargah, B.F., Biswas, A.: Application of the first integral method to fractional partial differential equations. Indian J. Phys. 88(2), 177–184 (2014)
Oldham, K.B., Spanier, J.: The Fractional Calculus. Academic Press, London (1974)
Rawashdeh, M.S.: A reliable method for the space-time fractional Burgers and time-fractional Cahn–Allen equations via the FRDTM. Adv. Differ. Equ. 2017, 1–14 (2017)
Rizvi, S.T.R., Ashraf, M., Ahmad, M.O., Younis, M., Ali, K.: Dipole and Gausson soliton for ultrashort laser pulse with high order dispersion. Superlattice Microstruct. 109, 504–510 (2017)
Sahar, A.S., Younis, M., Rizvi, S.T.R.: Optical dark and dark-singular solitons with anticubic nonlinearity. Optik 147, 27–31 (2017)
Samko, S., Kilbas, A.A., Marichev, O.: Fractional Integrals and Derivatives: Theory and Applications. Gordon and Breach Science Publishers, Yverdon (1993)
Sardar, A., Husnine, S.M., Rizvi, S.T.R., Younis, M., Ali, K.: Multiple travelling wave solutions for electrical transmission line model. Nonlinear Dyn. 82(3), 1317–1324 (2015)
Sonomezoglu, A., Eslami, M., Zhou, Q., Zerrad, E., Biswas, A., Belic, M., Mirzazadeh, M., Ekici, M.: Optical solitons in nano-fibers with fractional temporal evolution. J. Comput. Theor. Nanosci. 13(8), 5361–5374 (2016)
Yang, X.F., Deng, Z.C., Wei, Y.: Riccati–Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. (2015). https://doi.org/10.1186/s13662-015-0452-4
Yildirim, A., Pinar, Z.: Application of the exp-function method for solving nonlinear reaction–diffusion equations arising in mathematical biology. Comput. Math. Appl 60, 1873–1880 (2010)
Younis, M.: Optical solutions in (n + 1) dimensions with Kerr and power law nonlinearities. Modern Phys. Lett. B 31(15), 1–750186 (2017)
Younis, M., Rizvi, S.T.R.: Optical soliton like pulses in ring cavity fibers of carbon nanotubes. J. Nanoelectron. Optoelectron. 11(3), 276–279 (2016)
Younis, M., Rrhman, H., Rizvi, S.T.R., Amer, M.S.: Dark and singular optical solitons perturbation with fractional temporal evolution. Superlattices Microstruct. 104, 525–531 (2017)
Zhou, Q., Moshokoa, S.P., Biswas, A., Belic, M., Ekici, M., Mirzazadeh, M.: Solitons in optical metamaterials with fractional temporal evolution. Optik 127(22), 10879–10897 (2016)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Inc, M., Yusuf, A., Aliyu, A.I. et al. Soliton structures to some time-fractional nonlinear differential equations with conformable derivative. Opt Quant Electron 50, 20 (2018). https://doi.org/10.1007/s11082-017-1287-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-017-1287-x