
Abstract
In this work, a non-isospectral and variable-coefficient Kadomtsev–Petviashvili equation is considered using Hirota’s bilinear form and a direct assumption with arbitrary functions. Analytical rational solutions in light of positive quadratic functions and lump solutions of the variable-coefficient Kadomtsev–Petviashvili equation are obtained. These lump solutions describe two types of characters by some three-dimensional graphs and contour plots, which contain bright lump wave and bright–dark lump wave. Meanwhile, periodic structure of the lump wave is also shown.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear integrable equations are often used to describe problems in the fields of mechanics, fluid mechanics, plasma, fiber optic communication and Bose–Einstein condensation [1,2,3,4,5]. Finding exact solutions of nonlinear integrable equations has become an important research topic [6,7,8,9,10,11,12,13], and a series of special methods have been proposed, such as inverse scattering method [14], Darboux transformation method [15], truncated Painlevé expansion method [16], Hirota’s bilinear method [17], \((G'/G)\)-expansion method [18], multi-exponential function method [19] and so on.
In recent years, lump-type solutions and lump–stripe mixed solutions have attracted many scholars’ attention. They can reveal very interesting dynamical properties [20,21,22,23,24,25,26,27,28,29,30,31,32]. The lump solution, also known as the rational solution, is an elastic collision in which the shape, amplitude and velocity remain unchanged after collision with the soliton solution. The mixed solution of lump–stripe mainly considers the interaction between lump solution and other soliton solutions. The research in this field is mainly based on Hirota’s bilinear method and symbolic computation. Many nonlinear integrable equations have lump formal solutions and lump–stripe mixed solutions. Some important results have been established. Gilson and Nimmo discussed the lump solution and properties of the B-type Kadomtsev–Petviashvili (KP) equation [33]. Li [34] and his collaborators considered the interaction between lump solution and \(\cosh \) function. Sun et al. [35] considered the interaction between lump solutions and exponential functions. Ma et al. [36] further considered the interaction between the lump solution and the trigonometric function and the bi-exponential function, which have more abundant dynamical properties and structures. With the development of lump formal solutions and lump–stripe mixed solutions, the dynamical properties of the solutions are discussed, which will help us to understand the physical background behind the nonlinear integrable equations.
The KP equation was first proposed in 1970 by Soviet physicists Kadomtsev and Petviashvili [37], which has been used to describe water waves of long wavelength with weakly nonlinear restoring forces and frequency dispersion, and waves in ferromagnetic media, as well as two-dimensional matter-wave pulses in Bose–Einstein condensates. The KP model has the wave dispersion changing significantly the nonlinear dynamics [38]. Nonlinear stability with infinite space and periodic boundary conditions and dynamics of solitary waves of KP-type equation have been discussed in many literatures [39,40,41].
In this paper, a (\(3+1\))-dimensional generalized KP equation with variable coefficients is presented as follows [42]:
where \(u=u(x,y,z,t)\) is the wave amplitude function, which describes the long water waves and small-amplitude surface waves with weak nonlinearity, weak dispersion and weak perturbation in fluid mechanics. \(\vartheta _i(t)(i=1,2,3,4,5)\) are arbitrary differentiable functions. \(\vartheta _1(t)\) and \(\vartheta _2(t)\) represent the dispersion and nonlinearity, respectively. \(\vartheta _3(t)\) and \(\vartheta _5(t)\) are the functions representing the perturbed effects. \(\vartheta _4(t)\) represents the disturbed wave velocities along the z direction, and the subscripts represent the corresponding derivatives. When \(\vartheta _1=\vartheta _2=\vartheta _3=\vartheta _4=1\) and \(\vartheta _5=0\), Eq. (1) becomes the (\(3+1\))-dimensional generalized KP equation [43]. For Eq. (1), Wronskian and Grammian solutions were obtained with a constraint condition on the variable coefficients [44]. A couple of solutions have been studied by the extended transformed rational function method [45]. Pfaffian solutions were presented by the Pfaffianization procedure of Ohta and Hirota [42].
For the KP-type equations with constant coefficients, rational solutions and lump-type solutions have been obtained in many research works. However, as far as we know, rational solutions and lump-type solutions to the KP equation with the variable coefficients have not been found yet, which will become the primary work of our paper. Section 2 inquires the rational solutions and lump solutions by the Hirota’s bilinear form and a direct assumption with arbitrary functions; Sect. 3 describes the spatial structures of the lump waves in figures by choosing some suitable parameters; Sect. 4 gives the conclusion.
2 Rational solutions and lump solutions for Eq. (1)
Through the transformation \(u=\frac{2\,\vartheta _1(t)}{\vartheta _2(t)}\,[ln\xi (x,y,z,t)]_x\) and the constraint \(\vartheta _1(t)=\vartheta _0 \vartheta _2(t) e^{-\int \vartheta _5(t) \, \hbox {d}t}\), Hirota’s bilinear form of Eq. (1) can be presented as
This is equivalent to:
Considering the rational solutions and lump solutions for Eq. (1), we make the following assumption
where \(\alpha _1\), \(\alpha _2\), \(\alpha _3\), \(\alpha _5\), \(\alpha _6\) and \(\alpha _7\) are undefined constants. \(\alpha _4(t)\), \(\alpha _8(t)\), \(\alpha _9(t)\) are unknown differentiable function. Compared with those methods in Refs. [25,26,27,28,29,30,31,32], our assumption can be used for solving variable-coefficient nonlinear integrable equation. Substituting Eq. (4) into Eq. (3) with the Mathematica software, we have following results
where \(\alpha _1 \alpha _5\ne 0\), \(\eta _1\) and \(\eta _2\) are integral constants. Substituting Eqs. (4), (5) and the constraint \(\vartheta _1(t)=\vartheta _0 \vartheta _2(t) e^{-\int \vartheta _5(t) \, \hbox {d}t}\) into the transformation \(u=\frac{2\,\vartheta _1(t)}{\vartheta _2(t)}\,[ln\xi (x,y,z,t)]_x\), the rational solutions for Eq. (1) can be expressed as follows:
where \(\vartheta _0\) is an arbitrary nonzero constant. In addition to the constraint (I), other parameters are arbitrary.

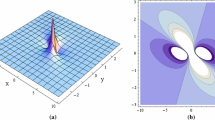
Rational solution \(u^{(I)}\) when \(z= -5\)a three-dimensional graph, b contour graph
To describe the resulting rational solutions in Eq. (6), we select the two particular values for the parameters:
and
Substituting Eq. (7) and Eq. (8) into solution \(u^{(I)}\), three-dimensional graphs and contour graphs at \(z=-5\) and \(x=-5\) are shown in Figs. 1 and 2, respectively.

Rational solution \(u^{(I)}\) when \(x= -5\)a three-dimensional graph, b contour graph

Spatial structure of the bright–dark lump solution \(u^{(II)}\) when \(z= 0\)a three-dimensional graph, b contour plot

Spatial structure of the bright–dark lump solution \(u^{(II)}\) when \(x= 0\)a three-dimensional graph, b contour plot
Next, we will present the lump solutions for Eq. (1) and discuss their spatial structures as follows
where \(\alpha _9 [\alpha _7 \left( \alpha _1+\alpha _2 \vartheta _3(t)\right) -\alpha _3 \left( \alpha _5+\alpha _6 \vartheta _3(t)\right) ]\ne 0\), \(\eta _3\) and \(\eta _4\) are integral constants. Substituting Eq. (4), Eq. (7) and the constraint \(\vartheta _1(t)=\vartheta _0 \vartheta _2(t) e^{-\int \vartheta _5(t) \, \hbox {d}t}\) into the transformation \(u=\frac{2\,\vartheta _1(t)}{\vartheta _2(t)}\,[ln\xi (x,y,z,t)]_x\), the lump solutions for Eq. (1) can be expressed as follows:
where \(\vartheta _0\) is an arbitrary nonzero constant. In addition to the constraint (II), other parameters are arbitrary.

Spatial structure of the bright lump solution \(u^{(II)}\) when \(y= -5\) (a, d), \(y= 0\) (b, e) and \(y = 5\) (c, f)

Periodic structure of the lump solution \(u^{(II)}\) when \(x= -5\) (a, d), \(x= 0\) (b, e) and \(x = 5\) (c, f)
3 Spatial structures of lump solutions in Eq. (10)
To demonstrate the spatial structures of lump solutions in Eq. (10), we select the three particular values for the parameters:
and
Substituting Eq. (11) into solution \(u^{(II)}\), three-dimensional graphs and contour plots at \(z=0\) and \(x=0\) are shown in Figs. 3 and 4, respectively. Substituting Eq. (12) and Eq. (13) into solution \(u^{(II)}\), three-dimensional graphs and contour plots at \(y=-5; 0; 5\) and \(x=-5; 0; 5\) are presented in Figs. 5 and 6, respectively.
Figures 3 and 4 demonstrate the spatial structure of the bright–dark lump solution because the height of the peak is competent for the depth of the valley bottom, which contains one peak and one valley. Their peak and valley are meristic. Figure 5 shows the spatial structure of the bright lump solution, which contains one peak and two valleys. Figure 6 shows the periodic structure of the lump solution.
4 Conclusion
In this work, by applying Hirota’s bilinear form and a direct assumption with arbitrary functions, we have obtained rational solutions and lump solutions to the (\(3+1\))-dimensional generalized KP equation with variable coefficients. Spatial structures of the bright lump solution and the bright–dark lump solution are shown by some three-dimensional graphs and contour plots.
References
Osman, M.S., Wazwaz, A.M.: An efficient algorithm to construct multi-soliton rational solutions of the (2+ 1)-dimensional KdV equation with variable coefficients. Appl. Math. Comput. 321, 282–289 (2018)
Wazwaz, A.M., El-Tantawy, S.A.: A new (3+1)-dimensional generalized Kadomtsev–Petviashvili equation. Nonlinear Dyn. 84(2), 1107–1112 (2016)
Lan, Z.Z., Gao, B., Du, M.J.: Bilinear forms and dark soliton behaviors for a higher-order variable-coefficient nonlinear Schrödinger equation in an inhomogeneous alpha helical protein. Wave. Random. Complex. (2017). https://doi.org/10.1080/17455030.2017.1409914
Wazwaz, A.M.: Compact and noncompact physical structures for the ZK-BBM equation. Appl. Math. Comput. 169(1), 713–725 (2017)
Wang, C.J.: Lump solution and integrability for the associated Hirota bilinear equation. Nonlinear Dyn. 87, 2635–2642 (2017)
Wazwaz, A.M.: Abundant solutions of various physical features for the (2 + 1)-dimensional modified KdV-Calogero-Bogoyavlenskii-Schiff equation. Nonlinear Dyn. 89(3), 1727–1732 (2017)
Lan, Z.Z.: Multi-soliton solutions for a (2 + 1)-dimensional variable-coefficient nonlinear schrödinger equation. Appl. Math. Lett. 86, 243–248 (2018)
Wazwaz, A.M.: A two-mode modified KdV equation with multiple soliton solutions. Appl. Math. Lett. 70, 1–6 (2017)
Jia, S.L., Gao, Y.T., Ding, C.C., Deng, G.F.: Solitons for a (2 + 1)-dimensional Sawada–Kotera equation via the Wronskian technique. Appl. Math. Lett. 74, 193–198 (2017)
Wazwaz, A.M.: Two-mode fifth-order KdV equations: necessary conditions for multiple-soliton solutions to exist. Nonlinear Dyn. 87(3), 1685–1691 (2017)
Huang, L.L., Chen, Y.: Lump solutions and interaction phenomenon for (2 + 1)-dimensional Sawada–Kotera equation. Commun. Theor. Phys. 67(5), 473–478 (2017)
Wazwaz, A.M.: A new integrable equation that combines the KdV equation with the negative-order KdV equation. Math. Method. Appl. Sci. 41(1), 80–87 (2017). https://doi.org/10.1002/mma.4595
Wazwaz, A.M.: Painlevé analysis for a new integrable equation combining the modified CalogeroBogoyavlenskiiSchiff (mCBS) equation with its negative-order form. Nonlinear Dyn. 91(2), 877–883 (2018)
Gardner, C.S., Greene, J.M., Kruskal, M.D., Miura, R.M.: Method for solving the Korteweg-de Vries equation. Phys. Rev. Lett. 19, 1095–1097 (1967)
Xu, S., He, J., Wang, L.: The darboux transformation of the derivative nonlinear schrödinger equation. J. Phys. A-Math. Theor. 44(30), 6629–6636 (2011)
Liu, S.J., Tang, X.Y., Lou, S.Y.: Multiple Darboux–Bcklund transformations via truncated Painlevé expansion and Lie point symmetry approach. Chin. Phys. B 27(6), 060201 (2018)
Hirota, R.: Exact solutions of the Korteweg-de Vries equation for multiple collision of solitons. Phys. Rev. Lett. 27, 1192–1194 (1971)
Zayed, E.M.E., Gepreel, K.A.: The \((G/G)\)-expansion method for finding traveling wave solutions of nonlinear partial differential equations in mathematical physics. J. Math. Phys. 50(1), 013502-013502-12 (2009)
Liu, J.G., Zhou, L., He, Y.: Multiple soliton solutions for the new (2+1)-dimensional Korteweg-de Vries equation by multiple exp-function method. Appl. Math. Lett. 80, 71–78 (2018)
Tang, Y.N., Tao, S.Q., Guan, Q.: Lump solitons and the interaction phenomena of them for two classes of nonlinear evolution equations. Nonlinear Dyn. 89, 429–442 (2017)
Wazwaz, A.M., Osman, M.S.: Analyzing the combined multi-waves polynomial solutions in a two-layer-liquid medium. Comput. Math. Appl. 76(2), 276–283 (2018)
Su, J.J., Gao, Y.T., Jia, S.L.: Solitons for a generalized sixth-order variable-coefficient nonlinear Schrödinger equation for the attosecond pulses in an optical fiber. Commun. Nonlinear Sci. 50, 128–141 (2017)
Wazwaz, A.M.: Multiple soliton solutions for (2 + 1)-dimensional Sawada-Kotera and Caudrey-Dodd-Gibbon equations. Math. Method. Appl. Sci. 34(13), 1580–1586 (2011)
Lan, Z.Z., Gao, B.: Lax pair, infinitely many conservation laws and solitons for a (2 + 1)-dimensional Heisenberg ferromagnetic spin chain equation with time-dependent coefficients. Appl. Math. Lett. 79, 6–12 (2018)
Wazwaz, A.M.: A variety of negative-order integrable KdV equations of higher orders. Wave. Random. Complex. (2018). https://doi.org/10.1080/17455030.2017.1420270
Yang, J.Y., Ma, W.X., Qin, Z.: Lump and lump-soliton solutions to the (2 + 1)-dimensional ito equation. Anal. Math. Phys. 8, 1–10 (2017)
Wazwaz, A.M., El-Tantawy, S.A.: New (3 + 1)-dimensional equations of Burgers type and Sharma–Tasso–Olvertype: multiple-soliton solutions. Nonlinear Dyn. 87(4), 2457–2461 (2017)
Wazwaz, A.M.: Negative-order integrable modified KdV equations of higher orders. Nonlinear Dyn. 93(3), 1371–1376 (2018)
Tan, W., Dai, Z.D., Dai, H.P.: Dynamical analysis of lump solution for the (2 + 1)d ito equation. Therm. Sci. 21(4), 1673–1679 (2017)
Zou, L., Yu, Z.B., Tian, S.F., Feng, L.L., Li, J.: Lump solutions with interaction phenomena in the (2 + 1)-dimensional ito equation. Mod. Phys. Lett. B 32(7), 1850104 (2018)
Zhang, H.Q., Ma, W.X.: Lump solutions to the (2 + 1)-dimensional Sawada–Kotera equation. Nonlinear Dyn. 87, 2305–2310 (2017)
Ma, W.X.: Lump-type solutions to the (3 + 1)-dimensional Jimbo–Miwa equation. Int. J. Nonlinear Sci. Num. 17, 355–359 (2016)
Gilson, C.R., Nimmo, J.J.C.: Lump solutions of the BKP equation. Phys. Lett. A 147(8–9), 472–476 (1990)
Chen, M.D., Li, X., Wang, Y., Li, B.: A pair of resonance stripe solitons and lump solutions to a reduced (3 + 1)-dimensional nonlinear evolution equation. Commun. Theor. Phys. 67(6), 595–600 (2017)
Sun, H.Q., Chen, A.H.: Lump and lump-kink solutions of the (3 + 1)-dimensional Jimbo-Miwa and two extended Jimbo–Miwa equations. Appl. Math. Lett. 68, 55–61 (2017)
Ma, W.X., Yong, X., Zhang, H.Q.: Diversity of interaction solutions to the (2 + 1)-dimensional Ito equation. Comput. Math. Appl. (2017). https://doi.org/10.1016/j.camwa.2017
Kadomtsev, B.B., Petviashvili, V.I.: On the stability of solitary waves in weakly dispersive media. Sov. Phys. Dokl. 15, 539–541 (1970)
Kuznetsov, E.A.: Wave collapse in plasmas and fluids. Chaos 6(3), 381–390 (1996)
Liu, Y., Wang, X.P.: Nonlinear stability of solitary waves of a generalized Kadomtsev-Petviashvili equation. Commun. Math. Phys. 183(2), 253–266 (1997)
Belashov, V.Y.: Dynamics of KP equation solitons in media with low-frequency wave field stochastic fluctuations. Phys. Lett. A 197A, 282–289 (1995)
Belashov, V.Y., Belashova, E.S.: Nonlinear dynamics of 3d beams of fast magnetosonic waves propagating in the ionospheric and magnetospheric plasma. Geomagn. Aeronomy. 56(6), 716–723 (2016)
Abdeljabbar, A., Trung, T.D.: Pfaffian solutions to a generalized KP system with variable coefficients. Appl. Math. Sci. 10(48), 2351–2368 (2016)
Wazwaz, A.M.: Multiple-soliton solutions for a (3 + 1)-dimensional generalized KP equation. Commun. Nonlinear Sci. Numer. Simul. 17(2), 491–495 (2012)
Abdeljabbar, A., Ma, W.X., Yildirim, A.: Determinant solutions to a (3 + 1)-dimensional generalized KP equation with variable coefficients. Chin. Ann. Math. B 33(5), 641–650 (2012)
Mirzazadeh, M.: A couple of solutions to a (3 + 1)-dimensional generalized KP equation with variable coefficients by extended transformed rational function method. Electron. J. Math. Anal. Appl. 3(1), 188–194 (2015)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that there are no conflict of interests regarding the publication of this article.
Ethical standards
The authors state that this research complies with ethical standards. This research does not involve either human participants or animals.
Additional information
Project supported by National Natural Science Foundation of China (Grant No. 81160531).
Rights and permissions
About this article

Cite this article
Liu, JG., Eslami, M., Rezazadeh, H. et al. Rational solutions and lump solutions to a non-isospectral and generalized variable-coefficient Kadomtsev–Petviashvili equation. Nonlinear Dyn 95, 1027–1033 (2019). https://doi.org/10.1007/s11071-018-4612-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4612-4