
Abstract
In this article, a general complex dynamical network which contains multiple delays and uncertainties is introduced, which contains time-varying coupling delays, time-varying node delay, and uncertainties of both the inner- and outer-coupling matrices. A robust adaptive synchronization scheme for these general complex networks with multiple delays and uncertainties is established and raised by employing the robust adaptive control principle and the Lyapunov stability theory. We choose some suitable adaptive synchronization controllers to ensure the robust synchronization of this dynamical network. The numerical simulations of the time-delay Lorenz chaotic system as local dynamical node are provided to observe and verify the viability and productivity of the theoretical research in this paper. Compared to the achievement of previous research, the research in this paper seems quite comprehensive and universal.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Complex networks exist extensively in ecosystems, power grids, food webs and in many other spheres in our daily lives. Over the course of the past 30 years, technological revolutions of complex networks have received remarkable attention in various fields. The fields such as physics, mathematics, engineering application and economic science [1–3] all refer to the complex networks research. As a result, studying dynamical synchronization of complex dynamical networks tends to be very important to comprehend the influence of networks in the real-world. There are many achievements on synchronization in different complex networks [4–10]. By employing linear matrix inequality and Lyapunov stability theory, the global synchronization conditions on hybrid neural networks with coupling time-delay [5–7] were studied. There are a lot of research achievements about the synchronization of complex networks [8,10–18] and some appropriate adaptive controllers were presented in ref. [17]. Complex networks containing uncertainties of parameters have also been considered in refs [18–23].
Networks such as neural networks, communication transmission networks, social relationship networks etc. are considered as the real-world systems. Due to the limited processing speed and the finite information transmission as well as switching speeds of the amplifiers, the time-delay is inevitable and exist in real-world networks. There are a great deal of time-delays about information transmission between the nodes and the nodes, and inside the node. Adaptive synchronization for complex networks with time-varying delays were described in refs [18,24–28].
Furthermore, uncertainties can be generated from parameter perturbation, modelling errors, and incomplete information in coupling terms which is caused by the external communication disturbance. What is particularly worth mentioning is the uncertainties of the coupling matrices which play important roles in complex networks. The external disturbance is one of the factors which may break the synchronizing characteristics in complex dynamical networks. In short, robust synchronization of complex networks with uncertainties in outer and inner coupling matrices [26,29,30] is a very important area of research. We can view robust synchronization for complex networks with uncertainties in refs [31–34].
The time-delay and uncertainties exist extensively in the real-word networks, so that robust adaptive synchronization for complex networks with uncertainties and time-varying delays become a key and significant topic. We can see that there is much work on robust adaptive synchronization of complex dynamical networks [29,30,35,36]. However, the review of the existing research results, the time-varying delay is always single in many studies [35,37,38]. The time-varying coupling delay was not considered in ref. [39]. Furthermore, the recent refs [29,30] in this area only consider the uncertainties of the inner coupling matrix or outer coupling matrix, but do not consider the uncertainties of both the inner and outer coupling matrices, simultaneously. Lastly, till date, unfortunately, there are only a few papers related to the topic of robust adaptive synchronization of a general complex dynamical network with multiple delays and uncertainties. So, it is challenging to solve this synchronization problem for complex networks.
Based on the above discussions, we shall handle the robust adaptive synchronization problem of a general complex dynamical network with multiple delays and uncertainties. This dynamical network model contains multiple time-varying coupling delays, time-varying node delay, and the uncertainties of both the inner and outer coupling matrices. Based on robust adaptive control principle and the Lyapunov stability theory, the most important contributions of this paper are the establishment of a robust adaptive synchronization scheme for the general complex networks with multiple delays and uncertainties. We choose some suitable adaptive synchronization controllers to ensure robust synchronization of this dynamical network. We also present the theoretical analysis and numerical simulations of this problem.
The rest of the paper is organized as follows: The review of the complex network models is followed in §2. We also introduce synchronization problem of a general complex dynamical network with multiple delays and uncertainties. We present some suitable assumptions and lemmas that are needed. The robust adaptive synchronization criterion of the complex dynamical network mentioned above is raised by employing robust adaptive control principle and the Lyapunov stability theory in §3. In §4, we use simulations verifying the theoretical result of this paper. The summary is presented in §5.
2 Fundamental formula
In this section, a general complex dynamical network with multiple delays and uncertainties is considered and some fundamental formulations are presented. We first introduce three former models which will be compared before presenting the complex network model we design in this paper. Then we introduce a complex network model that contains multiple coupling time-varying delays, nodes delay and various uncertainties of the inner- and outer-coupling matrices. Our model contains all the factors that were considered in the earlier models.
2.1 Model description
In ref. [29], we first introduce a complex dynamical network model with multiple time-varying coupling delays, which can be represented by
where x i (t) = [ x i1(t), x i2(t), … , x in (t)] T ∈\(\mathcal {R}^{n}\) is the state vectors of the nodes, f(x i (t)) = [ f 1(x i (t)), f 2(x i (t)), … , f n (x i (t))] T ∈\(\mathcal {R}^{n}\) is the smooth nonlinear vector-valued function, \(\mathcal {I}\) = {1, 2, … , N}, Γ(k) = diag{\(\gamma _{1}^{(k)}\), \(\gamma _{2}^{(k)}\), … , \(\gamma _{n}^{(k)}\)} ∈\(\mathcal {R}^{n\times n}\) are the inner coupling matrices. There exist two connected nodes i and j (at time t − τ k (t) for all 1 ≤i, j ≤N). C (k) = [\(c_{ij}^{(k)}\)] N×N (k ∈\(\mathcal {M}\)) are the coupling configuration matrices, which stand for the topological structure. C (k) meet the following diffusive coupling conditions:
τ k (t) ≥ 0 (k = 1, 2, … , m) are different time-varying coupling delays and ε is the coupling strength of complex network (1). \(\mathcal {M}\) = {1, 2, … , m}.
In ref. [29], complex dynamical network with uncertainties of the outer coupling matrix is represented by
where \(\hat {c}_{ij}^{(k)}\) =\(c_{ij}^{(k)}\) + Δ\(c_{ij}^{(k)}\)(t), Δ C (k)(t) = [ Δ\(c_{ij}^{(k)}\)(t)] N×N represent the uncertainties of the outer coupling matrix.
In ref. [30], dynamical network with uncertainties of the inner coupling matrix is represented by
where \(\hat {\Gamma }^{(k)}={\Gamma }^{(k)}+{\Delta } {\Gamma }^{(k)}(t),~{\Delta }{\Gamma }^{(k)}(t)\in \mathcal {R}^{n\times n}\) are the uncertainties of the inner coupling matrix. The complex network (3) does not consider the uncertainties of the outer coupling matrix and that is a deficiency compared to the system (4) we designed later.
In this article, a general complex network with multiple delays and uncertainties containing N dynamical nodes is presented, in which each node is an n-dimensional dynamical unit with delay. The complex network with coupling delay and uncertainties of the inner and outer coupling matrices is described as
where \(A\in \mathcal {R}^{n\times n}\) is a constant matrix, \(g(x_{i}(t-\tau (t)))=[g_{1}(x_{i}(t-\tau (t))),~g_{2}(x_{i}(t-\tau (t))),\ldots ,g_{n}(x_{i}(t-\tau (t)))]^{T}\in \mathcal {R}^{n}\) is a continuously differentiable nonlinear vector function. τ(t) is the time-varying delay of the isolated node.
Remark 1.
The network (4) represents a general complex dynamical network, i.e., there exists much more communication between nodes i and j. Let us review the shortage of the former models mentioned above. The complex network (1) ignored the uncertainties of the inner and outer coupling matrices (see ref. [29]). The network model (2) did not take the inner coupling uncertainties into consideration (see ref. [29]). The uncertainties of the outer coupling matrix were ignored in complex network (3) (see ref. [30]). To summarize, the model we designed has much more applicability to the real-world networks. The network (4) contains not only multiple coupling delays but also nodes delay and the uncertainties of the inner coupling and outer coupling matrices. We also considered the uncertainties of the coupling configuration representing the coupling strength and the topological structure of the complex network.
2.2 Control object
The standard state equation is designed as follows:
where s(t) in eq. (5) is the synchronization state.
We should synchronize all nodes in our model (4), i.e, \(\lim _{t\to \infty }\| x_{i}(t)-s(t)\|=0,~i\in \mathcal {I}.\) Then we can tell network (4) synchronizes to the state s(t).
2.3 Propaedeutic
In the preliminary study, we present some suitable assumptions and lemmas that are needed.
Assumption 1.
Suppose the two vector functions f(⋅) and g(⋅) satisfy the locally Lipschitz condition, there exists two positive constants α and β such that,
Assumption 2.
The delays τ k (t) and τ(t) are differential functions with
Assumption 3.
The norm-bounded uncertain matrices ΔΓ(k) (t) can be designed as
F and E are constant matrices, whose dimensions are suitable. The uncertain matrix Φ(k) (t) satisfies (Φ(k) (t)) T Φ (k) (t)≤I n .
Assumption 4.
Suppose ΔC (k) (t) are norm-bounded. We can find that positive constants \(M_{c}^{(k)}\) satisfy the equation \(\|{\Delta } C^{(k)}(t)\|_{2}\leq M_{c}^{(k)}\) , \(k\in \mathcal {M}\). ΔC (k) (t) here are the same as mentioned earlier and are still diffusive.
Lemma 1.
(Matrix Cauchy inequality [40]). For any symmetric positive definite matrix \(M\in \mathcal {R}^{n\times n}\) and vectors \(x,y\in \mathcal {R}^{n}\) , we have
Lemma 2.
[29]. For e i (t) = [ e i1 (t), e i2 (t), … , e in (t)] T ∈ \(\mathcal {R}^{n}\) , \(\hat {e}_{i}\) (t) = [ e 1i (t), e 2i (t), … , e Ni (t)] T ∈ \(\mathcal {R}^{n}\) are column vectors, ξ=diag{ξ 1 , ξ 2 ,…,ξ n }, ζ=diag{ζ 1 , ζ 2 ,…,ζ n } and D=diag{d 1 , d 2 ,…,d N } are diagonal matrixes, then the following results hold:
3 Synchronization of general complex networks
In this section, we studied the synchronization problem of the dynamical network (4). We observe the robust adaptive synchronization of the network which includes various factors, such as time-varying delays containing the nodes and coupled terms and uncertainties of the inner coupling matrix and outer coupling matrix. The result presents a very good effect.
In order to research the control object and make the network (4) synchronizes to the state s(t), we design the adaptive controllers \(u_{i}(t), i\in \mathcal {I}\). The controlled network is designed as follows:
where \(u_{i}(t), i\in \mathcal {I}\), are adaptive synchronization controllers.
We define e i (t) = x i (t)−s(t) as the error dynamical signal. According to eqs (5) and (12), we can describe the error dynamical network as
Hence, in order to ensure that the complex network (12) synchronizes to the state s(t), we introduce the controllers \(u_{i}(t), i\in \mathcal {I}\). Then, we can solve the global asymptotical stability problem of the error dynamical network (13), and the stability problem of the zero solution of the error dynamical network (13) can be solved easily.
Theorem 1..
If the Assumptions 1–4 are established, the controlled complex network (12) can achieve globally asymptotic synchronization under the following adaptive synchronization controllers:
and the adaptive updating laws:
where k i (0) and β i are arbitrary positive constants. The adaptive synchronization gains will be designed later.
Proof.
The Lyapunov candidate function can be given as
where \(\lambda _{\max }^{(E,k)}=\lambda _{\max }[(\hat {C}^{(k)}\otimes E)^{T}(\hat {C}^{(k)}\otimes E),~\rho _{i}~(i\in \mathcal {I})\) are the positive constants which will be given later.
Taking Assumption 4 into consideration, we get
where \(M^{(k)}, k\in \mathcal {M}\), are positive constant numbers. That also proves the existence of \(\lambda _{\max }^{(E,k)}\). □
Let the time t be a variable and take the variation tendency of the dynamic errors (13) into account. The derivative of Lyapounov function (16) can be given as follows:
Bringing u i (t) (14) and k i (t) (15) into eq. (18), yields
Based on Assumption 1,
Based on Lemma 2,
Based on Lemma 1,
and
In accordance with Lemma 1 and Assumptions 3–4, we have
Putting (20)–(25) into eq. (19), we have
Based on Lemma 2, we have
where Θ=2 diag{ρ 1, ρ 2,…, ρ N }.
Based on Assumption 2, we have
Then, we get
We can select some applicable \(\rho _{i}, i\in \mathcal {I}\), which satisfies
Substituting inequality (30) into inequality (29) and α, β are Lipsshitz constants,
Hence, it is known that only if e i (t)=0 for \(i\in \mathcal {I}\), \(\dot {V}(e(t))=0\), so the error dynamics network (13) under controllers (14) and adaptive updating laws (15) is globally asymptotically stable at e i (t)=0. Then we can say that the states of the complex network (12) globally asymptotically converge to the synchronization state s(t).
Remark 2.
We can see that network (4) shows strong robustness with the controller designed above referring to the studies [29,30,35] previously shown. The uncertainties and the node delay of the complex network (4) can also be solved well compared to refs [29] and [30]. The assumptions are also satisfied for network model (4).
Remark 3.
If we consider only the node delay and ignore the uncertainties, we can see the general model of the complex network in ref. [35]. By comparison, this article contains not only most of the above-mentioned delays but also uncertainties of the inner coupling and outer coupling. Furthermore, it also develops the pre-existing research.
Remark 4.
If we do not consider the node delay and let ΔΓ(k)(t)=0, ΔC (k)(t)=0 the network (4) is translated to
which was mentioned in ref. [29]. Hence, in this paper, our network model (4) not only includes the network models mentioned above but also considers the uncertainties of the coupling matrices and node delay, and we can also see excellent robustness with the proper adaptive controller.
Remark 5.
When ΔC (k)(t)=0, and ignoring the node delay, the network (4) is translated into
which was mentioned in [30]. The model is also included in complex network (4). Compared with the model mentioned in ref. [29], this model (33) puts the uncertainties of the matrix ΔΓ(k)(t) into consideration and also show an excellent robustness synchronization.
Remark 6.
If ΔΓ(k)(t)=0, ignoring the node delay, the network (4) can be translated into
The special case was mentioned in [29]. Compared to the normal model (32), model (34) relaxes the restriction and puts ΔC (k)(t) into consideration. Obviously, our complex network model (4) also covers the special model.
4 Simulation model
In this section, we give the local node dynamics seen in eq. (35). The numeric simulation and the response curves of the system are also be presented later. Considering the systems put forward before, we choose the time-delay Lorenz chaotic system [41]:
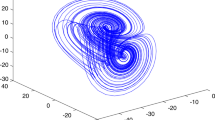
where a = 10, b = 8/3, c = 5, d = 6.5, τ = 0.5 and \([x_{1},x_{2},x_{3}]^{T}\in \mathcal {R}^{3}\) is the state variable group of time-delay Lorenz chaotic system (35). We choose x(0)=[1,0,−1]T as the initial conditions. From figure 1, we can see the chaotic attractor of the time-delay Lorenz chaotic system. From figure 2, we can see the time evolution of the state variables.

The Lorenz chaotic system’s attractor about eq. (35).

The Lorenz chaotic system’s state response about eq. (35).
4.1 System simulation
Obviously, Assumption 1 is certified, if α = 75, Assumption 2 is certified if \(\tau _{1}(t)=\frac {1}{2}-\frac {1}{3}e^{-t}~\text {and}~\bar {\tau }_{1}=\frac {1}{2},\mu _{1}=\frac {1}{3}; \tau _{2}(t)=\frac {2}{5}-\frac {2}{5}e^{-t}~\text {and}~\bar {\tau }_{2}=\frac {2}{5},\mu _{2}=\frac {2}{5}; \tau _{3}(t)=\frac {3}{10}-\frac {3}{10}e^{-t}~\text {and}~\bar {\tau }_{3}=\frac {3}{10},\mu _{3}=\frac {3}{10}.\)
Example 1.
Here, we design three subsystems (35) of the complex network system. The coupling systems are diffusive and asymmetric. The coupling configuration matrix
The inner coupling matrix Γ(k) is chosen as
Due to disturbance, the outer coupling matrix ΔC (k)(t), and the norm bounds of ΔC (k)(t) are
\(M_{c}^{(k)}=29.1678,~k=1,2,3.\)
Then
and ε = 1.
Thus, Assumptions 3 and 4 are demonstrated. The complex network (4) can have strong robust synchronization under u i (t) (14) and k i (t) (15). With the initial conditions,
Let adaptive gains β 1 = 1, β 2 = 2, β 3 = 3.
Figures 3–10 describe the tendency of the numeric simulations curves of the complex dynamic system. Figure 3 reflects the response curves in detail. The three curves of the figure are obvious and in the normal range. Figures 4–6 present the curves of the adaptive synchronization errors e i (t) of the system. The tendencies of the error response curves are in the range of the anticipation error and they all tend to be zero in the end. Figure 7 shows the adaptive gains of the adaptive controllers. The parameters we choose are suitable and the gains finally tend to be three constants. The response curves of the control inputs u i (t), i = 1,2,3 are presented in figures 8–10, the curves of the control inputs have little variation in the beginning and reach the plateau in the end. All the tendencies of the curves are acceptable and coincided with the expectation.

Synchronization state response curves of the complex network.

Robust adaptive synchronization errors e 1i (t), i = 1,2,3, in the uncertain controlled network.

Robust adaptive synchronization errors e 2i (t), i = 1,2,3, in the uncertain controlled network.

Robust adaptive synchronization errors e 3i (t), i = 1,2,3, in the uncertain controlled network.

The adaptive gains of the adaptive controllers.

Response curves of the control inputs u 1i , i = 1,2,3.

Response curves of the control inputs u 2i , i = 1,2,3.

Response curves of the control inputs u 3i , i = 1,2,3.
Remark 7.
Both the mathematical proof and the mathematical simulation results in this paper prove that the adaptive controllers we choose in Theorem 1 are suitable. Consulting refs [29,30], the adaptive controller gains we give is efficient and the parameters in the simulation have been adjusted to the proper values. All the factors designed guarantee robustness synchronization of the uncertain complex network (4) mentioned above. That is, the results of the simulation are perfect and excellent.
5 Conclusions
In this article, we investigate the robust adaptive synchronization of a general dynamical network with multiple delays and uncertainties. The time-varying delay, consisting of nodes and coupled terms, and the uncertainties of both the inner coupling matrix and outer coupling matrix have been taken into consideration. The Lyapunov stability theory and robust adaptive principle have been used to achieve synchronization condition of the complex dynamical network. Under suitable adaptive controllers, we proved that the states of the complex network with multiple delays (that is, coupling time-varying delays and node delay) and uncertainties of the both inner coupling matrix and outer coupling matrix can synchronize to the anticipated synchronization state. From the simulation results, we can see the effectiveness of the proposed methods, and the achievements presented in this article improve and generalize the corresponding results of recent works about synchronization of complex networks.
References
Stefano Boccaletti, Vito Latora, Yamir Moreno, Martin Chavez and D-U Hwang, Phys. Rep. 424(4–5), 175 (2006)
Ping He, Xue-Lin Wang and Yangmin Li, Complexity 2015, doi: 10.1002/cplx.21698
Mark Newman, Networks: An introduction (Oxford University Press, 2010)
Guanrong Chen, Xiaofan Wang and Xiang Li, Introduction to complex networks: Models, structures and dynamics (Higher Education Press, 2012)
Huijun Gao, James Lamb and Guanrong Chen, IEEE Trans. Systems, Man, and Cybernetics Part B: Cybernetics 38(2), 488 (2008)
Yurong Liu, Zidong Wang, Jinling Liang and Xiaohui Liu, IEEE Trans. Neural Networks 20(7), 1102 (2009)
Yurong Liu, Zidong Wang, Jinling Liang and Xiaohui Liu, IEEE Trans. Neural Networks 19(11), 1910 (2008)
Cheng Hu, Juan Yu and Zhidong Teng, Nonlinear Dyn. 67(2), 1373 (2012)
Yijun Zhang, Xu Shengyuan, Yuming Chu and Jinjun Lü, Appl. Math. Comput. 216(3), 768 (2010)
D H Ji, D W Lee, J H Koo, S C Won, S M Lee and Ju H Park, Nonlinear Dyn. 65(4), 349 (2011)
Song Zheng, Shuguo Wang, Gaogao Dong and Qingsheng Bi, Commun. Nonlin. Sci. Numer. Simul. 17(1), 284 (2012)
Xiangjun Wu and Hongtao Lu , Commun. Nonlin. Sci. Numer. Simul. 17(7), 3005 (2012)
Y Sun, W Li and D Zhao, Chaos 22(2), 023152 (2012)
Shuguo Wang and Hongxing Yao, Chin. Phys. B 20(9), 090513 (2011)
Wen Sun, Zhong Chen, Yibing Lü and Shihua Chen, Appl. Math. Comput. 216(8), 2301 (2010)
Z Li and X Xue, Chaos 20(2), 023106 (2010)
Yongzheng Sun and Donghua Zhao, Chaos 22(2), 023131 (2012)
Hui Liu, Lu Jun-An, Jinhu Lü and David John Hill, Automatica 45(8), 1799 (2009)
S Guo and F Xinchu, Commun. Theoret. Phys. 54(1), 181 (2010)
Junchan Zhao, Qin Li, Jun-An Lu and Zhong-Ping Jiang, Chaos 20(2), 023119 (2010)
Ranjib Banerijee, Loan Grosu and Synmal Dana, Antisynchronization of two complex dynamical networks, In: Complex sciences edited by Jie Zhou (Springer, 2009) Vol. 4, pp. 1072–1082
Yongzheng Sun, Wang Li and Jiong Ruan, Commun. Nonlin. Sci. Numer. Simul. 18(4), 989 (2013)
Mei Sun, Changyan Zheng and Lixin Tian, Commun. Nonlin. Sci. Numer. Simul. 15(8), 2162 (2010)
Ping He, Chun-Guo Jing, Tao Fan and Chang-Zhong Chen, Int. J. Control Automation 6(4), 197 (2013)
Wanli Guo, Francis Austin and Shihua Chen, Commun. Nonlin. Sci. Numer. Simul. 15(6), 1631 (2010)
Ping He, Chun-Guo Jing, Tao Fan and Chang-Zhong Chen, Complexity 19(3), 10 (2014)
Jing Yao, Zhihong Guan and David John Hill, Automatica 45(9), 2107 (2009)
Yuan Kuan, Neurocomputing 72(4–6), 1026 (2009)
Ping He, Chun-Guo Jing, Tao Fan and Chang-Zhong Chen, Int. J. Automation and Control 7(4), 223 (2013)
Yin-Ping Zhao, Ping He, Hassan Saberi Nik and Junchao Ren, Complexity 20(6), 62 (2015)
S M Lee, S J Choi, D H Ji, H Park Ju and S C Won, Nonlinear Dyn. 59(1–2), 277 (2010)
Zhi Li and Guanrong Chen, Phys. Lett. A 324(2–3), 166 (2004)
Jin Zhou, Jun-An Lu and Jinhu Lü, IEEE Trans. Automatic Control 51(4), 652 (2006)
K Li and C H Lai, Phys. Lett. A 372(10), 1601 (2008)
Ping He, Chun-Guo Jing, Chang-Zhong Chen, Fan Tao and Hassan Saberi Nik, Pramana – J. Phys. 82(3), 499 (2014)
Ping He, Qingling Zhang, Chun-Guo Jing, Chang-Zhong Chen and Fan Tao, Optimal Control Applications and Methods 35(6), 676 (2014)
Hongyue Du, Peng Shi and Ning Lü, Nonlinear Analysis: Real World Applications 14(2), 1182 (2013)
Ping He, Shu-Hua Ma and Tao Fan, Chaos 22(4), 043151 (2012)
Jinliang Wang, Zhichun Yang and Huaining Wu, J. Eng. Math. 74(1), 175 (2012)
Thongchai Botmart, Piyapong Niamsup and V N Phat, Appl. Math. Comput. 217(21), 8236 (2011)
Chong-Zhao Han, Hai-Peng Ren and Ding Liu, Acta Phys. Sin. 55(6), 2694 (2006)
Acknowledgements
This work was jointly supported by the Research Foundation of Department of Education of Sichuan Province (Grant Nos 14ZA0203 and 14ZB0210), the Open Foundation of Enterprise Informatization and Internet of Things Key Laboratory of Sichuan Province (Grant Nos 2014WYJ01 and 2013WYY06), the Open Foundation of Artificial Intelligence Key Laboratory of Sichuan Province (Grant Nos 2014RYY02, 2013RYJ01, the Science Foundation of Sichuan University of Science & Engineering (Grant No. 2014PY14).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
LU, Y., HE, P., MA, SH. et al. Robust adaptive synchronization of general dynamical networks with multiple delays and uncertainties. Pramana - J Phys 86, 1223–1241 (2016). https://doi.org/10.1007/s12043-015-1182-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12043-015-1182-6