
Abstract
To attenuate the effects of parameter variations and disturbances of flexible spacecrafts on attitude control accuracy and stability, a composite control approach by combining nonlinear disturbance observer (NDO) and feedback linearization (FBL) control is proposed. In this paper, the multiple disturbances that act on spacecrafts from flexible appendages, space environment, and unmodelled dynamics are considered as an ‘equivalent’ disturbance. The proposed NDO is used to estimate and compensate for the disturbances through feedforward. Stability and tracking performance of the NDO are then analyzed. Moreover, the stability of the FBL + NDO composite control approach is established through the Lyapunov method. Simulation results show that the NDO can estimate disturbances and reduce the effect of disturbances on spacecrafts through feedforward compensation. Robust dynamic performance and attitude control accuracy are effectively improved.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
To meet the demand of future space missions, the high-precision and high-stability attitude control of flexible spacecrafts has become a difficult and important problem [1]. However, unknown external and internal disturbances widely act on spacecrafts, and the inertia parameter is uncertain. Moreover, the structural vibrations of flexible appendages usually occur in rotational maneuvers [2], which seriously affect attitude control performance. These problems pose a huge challenge for attitude control system designers, and thus good control schemes are required to improve robust performance and control accuracy to solve these problems.
Over the last decades, many researchers have conducted extensive studies on the spacecraft attitude control system. Early in the 1980s, Breakwell [3] and Ben-Asher et al. [4] discussed the optimal control scheme of flexible spacecrafts for vibration suppression problems. Afterward, to improve robust performance in the presence of the unmodelled dynamics, disturbances, model uncertainty, and structural vibrations of flexible appendages, many control methods with robustness have been studied for the spacecraft attitude control system. The sliding mode control (SMC) was proposed to effectively design the attitude control system in [5–7]. However, the phenomenon of chattering caused by SMC has limited its practical applications [1]. Luo et al. [8] and Hu et al. [9] studied the \({H}_\infty \) control scheme systematically for the attitude control system to solve disturbance and vibration problems. In [10–12], a series of adaptive attitude controllers was also applied to address the tracking problem of spacecrafts in the presence of unknown control input saturation and external disturbances. Ali et al. [13] designed a nonlinear backstepping attitude controller using an inverse tangent-based tracking function for the attitude maneuver problem of spacecrafts. The feedback linearization (FBL) control approach, with its advantages of efficiency and simplicity in the nonlinearity system, was also used to improve attitude control performance in [14–16]. Moreover, a hybrid control scheme with the classic FBL and \(\mu \)-synthesis control method was designed for the control of flexible space structures that consider uncertainties and environmental disturbances [17].
As an effective disturbance attenuation control strategy, the nonlinear disturbance observer (NDO), which can estimate unknown disturbances and effectively compensate for them through feedforward, has attracted the attention of many researchers [18–22]. A composite controller with hierarchical architecture attained by combining the NDO and the SMC was studied in [19, 20], and stability of the closed-loop system was also established. Qian et al. [21] designed a flight control system for a hypersonic gliding vehicle with the help of the NDO. An NDO approach was developed in combination with the nonlinear dynamic inverse control law for a missile autopilot system [22]. The NDO can implement disturbance attenuation and is easy to combine with other traditional feedback control methods, such as the FBL, \(H_\infty \) , variable structure controller, and SMC.
In this paper, the NDO combined with the FBL approach is proposed to enhance the disturbance attenuation ability and robust performance of a flexible spacecraft attitude control. The NDO, which can estimate various unknown disturbances, is designed for feedforward compensation. Then, a FBL approach is adopted for the flexible spacecraft attitude control. Stability of the closed-loop system is analyzed using the Lyapunov method. The composite attitude control scheme improves the accommodation of uncertainties and unknown disturbances to give the spacecraft attitude control system high precision and high stability.
2 Problem formulation
To simplify the control problem, three-axis rotation is considered, and the spacecraft includes one rigid body and \(n\) flexible appendages. The rotational dynamics of the spacecraft with flexible appendages is described as follows [23]:


where \(\varvec{\omega } \) is the attitude angle velocity of the spacecraft body frame with respect to the inertia frame expressed in the body frame, \(\varvec{J}\) is the exact inertia moment of the spacecraft, \(\Delta \varvec{J}\) is the uncertainties of the inertia moment, \({\mathbf {F}}_\mathrm{sai}\) is the coupling matrix, \(\varvec{\eta } _i\) is the modal coordinate of the \(i\mathrm{th}\) flexible appendage \((i=1,2,{\ldots },n)\), \({\mathbf {u}}\) is the control torque, \({\mathbf {d}}_{0}\) is the disturbance torque produced by the space environment and unmodelled dynamics, \(\varvec{\xi } _i \) is the damping ratio of the \(i\mathrm{th}\) flexible appendage, and \(\varvec{\varOmega } _\mathrm{ai} \) is the modal frequency of the \(i\mathrm{th}\) flexible appendage; the symbol \({\mathbf {x}}^{\times }\) is a skew symmetric matrix acting on the vector \( {\mathbf {x}}= [x_{1}\; x_{2}\;x_{3}]^\mathrm{T}\) and
Combining (1) with (2), we obtain
From (4), we can consider
as the disturbance produced by the elastic vibration of the flexible appendages and model uncertainties, and \(\varvec{\omega }^{\times }({\mathbf {J}}\varvec{\omega } )\) as the nonlinear function.
We denote \({\mathbf {d}}={\mathbf {d}}_{0}+{\mathbf {d}}_{1}\) as the ‘equivalent’ disturbance, including external and internal disturbances, model uncertainties, and unmodelled dynamics. The rotational dynamics of the spacecraft can be rearranged in the following form:
In this paper, the quaternion is used to express the attitude of the spacecraft, which is free of singularity and simpler to calculate due to the inexistence of transcendental functions [24]. The quaternion is defined by \({\mathbf {q}}=[q_{0} \; q_{1}\; q_{2}\; q_{3}]^\mathrm{T}=[q_{0}\;\hat{{\mathbf {q}}}^{T}]^\mathrm{T}\) satisfying \(\hat{{\mathbf {q}}}^{T}\hat{{\mathbf {q}}}+q_0^2 =1\), where \(q_{0}\) is the scalar component and \(\hat{{\mathbf {q}}}\in {\mathbf {R}}^{3\times 1}\) is the vector part. The attitude kinematics is given by [9]
3 Composite control system design
3.1 Nonlinear disturbance observer design
To design the NDO and the composite controller, the following assumptions are needed in this paper.
Assumption 1
In the spacecraft dynamics (6) and (7), all state variables can be measured, which implies that the attitude angle velocity \(\varvec{\omega } \) and the quaternion q are available for the NDO and composite controller design [8, 25].
Assumption 2
The elastic vibration and its velocity of flexible appendages are assumed to be bounded during the whole attitude control process [9]. Thus, \(\left\| {\dot{\varvec{\eta } }_i} \right\| \) and \(\left\| \varvec{\eta } _{i} \right\| \) are bounded.
Assumption 3
The ‘equivalent’ disturbance d is slow varying and bounded. Therefore, \(\dot{{\mathbf {d}}}\approx 0\) is reasonable.
To estimate the disturbance of system (6), we construct the disturbance observer as
where \(\hat{{\mathbf {d}}}\) is the estimation of the merged disturbance \({\mathbf {d,\;p}}(\varvec{\omega } )\) is the nonlinear function, and \({\mathbf {L}}(\varvec{\omega })\) is the nonlinear observer gain function defined by
Denoting \({\mathbf {d}}_\mathrm{e}\) as the disturbance observer error, we have
Theorem 1
Considering the system (6) and the NDO system (8), when the nonlinear function \({\mathbf {p}}(\varvec{\omega } )\) satisfies
the NDO system (8) can track the disturbance d, and the estimation error \({\mathbf {d}}_\mathrm{e}\) can converge to the origin, where \(\lambda _i >0\) and \(s_{i}\) is the positive odd integer \((i=1, 2,3)\).
Proof
Select a candidate Lyapunov function (CLF) \(V_{1}\) as:
Computing the derivative of \(V_{1}\), we have
Putting (8) into (13), we have
By substituting (6) into (14), (14) can be rewritten as
From (9) and (11), we can obtain
Clearly, \({\mathbf {L}}(\varvec{\omega })\) is a positive definite matrix. As \({\mathbf {J}}^{-1}\) is also a positive definite matrix, when \({\mathbf {d}}_\mathrm{e}\ne \mathbf{0}\),
The NDO system (8) can track the disturbance d, and the estimation error \({\mathbf {d}}_\mathrm{e}\) converges to the origin. The conclusion can then be obtained.
Further, from (13)–(15), we can obtain
Hence, it is easy to get the solution
where \({\mathbf {d}}_\mathrm{e}(0)\) is the initial value of \({\mathbf {d}}_\mathrm{e}\). \(\square \)
Remark 1
It is obvious that the convergence rate and observation error accuracy of NDO depend on the parameters \(\lambda _{i} \) and \(s_{i}\). The larger the parameters \(\lambda _i\) and \(s_{i}\) are, the faster the convergence rate and the higher the observation error accuracy will be. However, too large parameters will lead to undesirable substantial chattering. Therefore, the parameters \(\lambda _{i}\) and \(s_{i}\) cannot be selected too large.
3.2 Composite controller design
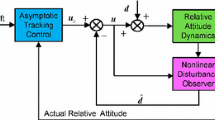
The composite controller scheme mainly consists of two parts as shown in Fig. 1: The inner loop is the merged disturbance estimation and feedforward compensation, and the outside loop is the FBL attitude controller.

Schematic of the composite attitude control system
We denote \(\varvec{\omega }_\mathrm{e}\) as the error of the current attitude angle velocity with respect to the desired attitude angle velocity. Therefore,
where \(\varvec{\omega }_\mathrm{d}\) is the desired attitude angle velocity expressed in the body frame.
The expression \(q_\mathrm{e} =[q_\mathrm{e0}\;\hat{{\mathbf {q}}}_\mathrm{e}^\mathrm{T}]^{T}\) is defined as the error quaternion of the current attitude with respect to the desired attitude. The attitude kinematics error can be written as [24]
Generally, the classical FBL controller for system (6) and the attitude kinematic error system (21) without disturbances can be expressed as [15]
Therefore, the composite controller based on the FBL and NDO can be designed as
Theorem 2
Considering the rotational dynamic system (6) and the attitude kinematic error system (21), choose the control law u as
and the NDO in the form of (8); then, the system (21) is in global asymptotic stability, where \(k_{1}>0\) and \({\mathbf {K}}_{2}>0\) are controller gains, \(\eta _{2}>1 /(4\eta _{1}),\eta _{1}\) is the minimum eigenvalue of \({\mathbf {L}}(\varvec{\omega }){\mathbf {J}}^{-1}\) in (15), and \(\eta _{2} \) is the minimum eigenvalue of \({\mathbf {K}}_{2}\) in (24).
Proof
Consider a candidate Lyapunov function (CLF) \(V\) as:
Similarly, by computing the derivative of \(V\) along the trajectories of (21), we can obtain
In view of (13), (14), and (15), it shows that
Substituting (20) into (27) gives
It is readily obtained from (6) that
By combining the control law (24) with (29), we have
Further, the (30) can be transformed as
When the following condition
is satisfied,
According to (33), it is obvious that \(V(t)\le V(0)\) and \(V\) is bounded. Then, we easily find \(\hat{{\mathbf {q}}}_\mathrm{e} ,q_\mathrm{e0},\varvec{\omega }_\mathrm{e},{\mathbf {d}}_\mathrm{e}\) are bounded form (25), that is, \(\hat{{\mathbf {q}}}_\mathrm{e}\in L_\infty ,\varvec{\omega } _\mathrm{e} \in L_\infty ,{\mathbf {d}}_\mathrm{e} \in L_\infty \). In view of (13)–(15), it is clear \(\dot{{\mathbf {d}}}_\mathrm{e}\in L_\infty \) . According to (21), it is obvious \(\hat{{\mathbf {q}}}_\mathrm{e}\in L_\infty \) and \(q_\mathrm{e0}\in L_\infty \). Therefore, \({\mathbf {u}}\in L_\infty \) is clear from (24). Further, it is reasonable \(\dot{\varvec{\omega } }\in L_\infty \) from (6), so \(\dot{\varvec{\omega } }_\mathrm{e}\in L_\infty \).
The time derivative of (30) is given by
It is clear that \(\ddot{V}\) is bounded. According to the Barbalat’s Lemma [26], \(\dot{V}\) can converge to zero as \(\hbox {t}\rightarrow \infty \). Then, the observer error \({\mathbf {d}}_\mathrm{e}\), the attitude angle velocity error \(\varvec{\omega }_\mathrm{e}\), and the attitude error \(\hat{{\mathbf {q}}}_\mathrm{e} \) can converge to origin as \(\hbox {t}\rightarrow \infty \). The composite controller can effectively track the desired attitude in the presence of various disturbances, model uncertainties, and unmodelled dynamics. The conclusion can then be obtained. \(\square \)
Remark 2
As can be seen from (19) and (31), the system convergence rate depends on \(\eta _{2} -1/(4\eta _{1} ),\lambda _i\), and \(s_{i}\). To keep the stability of the system, the parameter \(\eta _{2}>1/(4\eta _{1})\) should be satisfied first. It is obvious that the larger the parameters \(\eta _{2} ,\lambda _{i} \), and \(s_{i}\) are, the faster the system states can converge to the origin. However, too large \(\eta _{2} ,\lambda _{i}\), and \(s_{i}\) will lead to undesirable substantial chattering and require a high control input torque u, which is bounded in practice. Thus, the parameters \(\eta _{2} ,\lambda _{i} \), and \(s_{i}\) cannot be chosen too large.
4 Simulation results and discussion
In this section, the disturbance attenuation ability and robust performance of the proposed composite control algorithm for flexible spacecrafts, which combines the NDO and FBL, are discussed and demonstrated by numerical simulations. We give the instruction attitude angle and use the FBL approach, adaptive control approach, and FBL + NDO approach to compare the tracking performance of the control system.
In the simulation, the moment of inertia of the spacecraft is
Four bending modes are considered for the flexible appendages with \(\omega _{1}=0.05\,\hbox {Hz}, \omega _{2}=0.5\,\hbox { Hz}\), \(\omega _{3} =1.0\,\hbox {Hz}\), and \(\omega _{4} =2.0\,\hbox { Hz}\); damping ratio of \(\xi _{1} =0.05,\xi _{2} =0.05,\xi _{3} =0.05\), and \(\xi _{4}=0.05\); and the coupling coefficients of the four bending modes are \({\mathbf {F}}_\mathrm{sai}=[{\mathbf {F}}_\mathrm{sa1}\; {\mathbf {F}}_\mathrm{sa2}\;{\mathbf {F}}_\mathrm{sa3}\; {\mathbf {F}}_\mathrm{sa4}]\), where \({\mathbf {F}}_\mathrm{sa1}=[-0.28895\hbox {e}2 -0.39046\hbox {e}1 0.3986\hbox {e}-8]^{T}\), \({\mathbf {F}}_\mathrm{sa2}=[0.49894\hbox {e}-7 0.052219 -0.30009\hbox {e}2]^{T}\), \({\mathbf {F}}_\mathrm{sa3}=[0.16520 -4.3318 -0.87999\hbox {e}-7]^{T}\), and \({\mathbf {F}}_\mathrm{sa4}=[6.7877 0.22092\hbox {e}1 0.98309\hbox {e}-9]^{T}\). Suppose \(n_{0}\) is the orbit rate, then the space environmental disturbance torques acting on the spacecraft are supposed as follows [1]:
Aside from the external merged disturbances, the disturbance form d can also represent the system uncertainties and unmodelled dynamics of a flexible spacecraft. That is, system uncertainties and unmodelled dynamics can be considered part of the disturbances, and the NDO approach can also estimate and compensate for them through feedforward. In the simulation, \(\pm 20\,\%\) perturbation of the nominal moment of inertial is considered [1]. The initial attitudes of the spacecraft are \([\varphi \; \theta \; \psi ] = [5^{\circ }\;5^{\circ }\;-5^{\circ }]\). The desired attitudes of the spacecraft are given by [11]
The composite control approach in Eq. (24), adaptive control approach in Ref. [25], and the pure FBL approach in Eq. (22) will control the flexible spacecraft attitude. We choose the same attitude controller parameters: \(k_{1}=27.3\) and \({\mathbf {K}}_{2}=\hbox {diag} (16.1, 28.5, 23.2)\). Meanwhile, the NDO parameters are chosen as: \(\lambda _{1} =2210,\lambda _{2} =2853,\lambda _{3} =2210\), \(s_{1}=s_{2}=s_{3}=3\); then the nonlinear function is \({\mathbf {p}}(\varvec{\omega })=[2210(\omega _{1}+{\omega _1^3 }/3)\; 2853(\omega _{2}+\omega _{2}^{3}/3)\) \(2210(\omega _{3}+{\omega _{3}^{3} }/3)]^{T}\). Suppose the maximum control torque for each axis generated by the actuators is \(u_\mathrm{max} <100(\hbox {N}\cdot \hbox {m})^{[\hbox {5}]}\). On the basis of the preceding formulation of our model, we can obtain the simulation results, respectively, as shown in Figs. 2, 3, 4, 5, 6, 7, 8, 9, and 10.

Time responses of disturbance \(d_\mathrm{x}\) and estimation

Time responses of disturbance \(d_\mathrm{y}\) and estimation

Time responses of disturbance \(d_\mathrm{z}\) and estimation

Time responses of roll angle

Time responses of pitch angle

Time responses of yaw angle

Time responses of FBL control torque

Time responses of adaptive control torque

Time responses of composite control torque
Figures. 2, 3, and 4 indicate the time responses of the three-axis disturbances, disturbance estimations, and estimation errors. Based on the simulation results in Figs. 2, 3, and 4, all disturbances from the flexible appendages, space environment, and unmodelled dynamics can be effectively estimated by the NDO, where the estimation error is \(<\)3.2 % of the practical disturbance for the roll axis, that for the pitch axis is \(<\)2.8 %, and that for the yaw axis is \(<\)2.1 %. The effects of the disturbances on the flexible spacecraft are reduced to the lowest by the NDO through feedforward compensation.
Under the same simulation conditions, Figs. 5, 6, and 7 show that all spacecraft attitude angles have better dynamic response performance controlled by the FBL + NDO composite controller. Moreover, the attitude tracking accuracy and attitude stabilization are improved compared with those generated by the pure FBL approach and the adaptive approach in the presence of various disturbances. The roll angle tracking error is \(<8\,\times \,10^-5^{\circ }\), the pitch angle tracking error is \(<1.5\,\times \, 10^{-3^{\circ }}\), and the yaw angle tracking error is \(<3\,\times \,10^{-6^{\circ }}\).
As demonstrated in Figs. 8, 9, and 10, the composite control torque is larger at the beginning of the simulations than the FBL control torque and the adaptive control torque. The reason is that the composite controller can estimate and compensate for the disturbances. This reason also explains how the FBL + NDO approach has better dynamic response performance than the FBL approach and adaptive approach.
5 Conclusions
A composite control approach combining the NDO with the FBL is proposed for the attitude control system of flexible spacecrafts to enhance disturbance attenuation ability and robust performance. The NDO is used to estimate various unknown disturbances and compensate for them through feedforward. The FBL controller can effectively accomplish attitude control in the presence of various disturbances. Simulation results demonstrate that the NDO can estimate the disturbance and reduce the effect of the disturbances on flexible spacecrafts through feedforward compensation. The composite controller can improve robust dynamic performance and attitude control accuracy.
References
Liu, H., Guo, L., Zhang, Y.M.: An anti-disturbance PD control scheme for attitude control and stabilization of flexible spacecrafts. Nonlinear Dyn. 67, 2081–2088 (2012)
Hu, Q.: Robust adaptive sliding-mode fault-tolerant control with L\(_{2}\)-gain performance for flexible spacecraft using redundant reaction wheels. IET Control Theory Appl. 4(6), 1055–1070 (2009)
Breakwell, J.A.: Optimal feedback slewing of flexible spacecraft. J. Guid. Control 4(5), 472–479 (1981)
Ben-Asher, J., Burns, J.A., Cliff, E.: Time-optimal slewing of flexible spacecraft. J. Guid. Control Dyn. 15(2), 360–367 (1992)
Lo, S.C., Chen, Y.P.: Smooth sliding-mode control design for spacecraft attitude tracking maneuvers. J. Guid. Control Dyn. 18(6), 1345–1349 (1995)
Hu, Q.L., Wang, Z.D., Gao, H.J.: Sliding mode and shaped input vibration control of flexible systems. IEEE Trans. Aerosp. Electron. Syst. 44(2), 503–519 (2008)
Hu, Q.L., Xiao, B., Wang, D.W., Poh, E.K.: Attitude control of spacecraft with actuator uncertainty. J. Guid. Control Dyn. 36(6), 1771–1776 (2013)
Luo, W.C., Chu, Y.C., Ling, K.V.: H\(_\infty \) Inverse optimal attitude-tracking control of rigid spacecraft. J. Guid. Control Dyn. 28(3), 481–493 (2005)
Hu, Q., Xiao, B., Friswell, M.I.: Fault tolerant control with \(\text{ H }_\infty \) performance for attitude tracking of flexible spacecraft. IET Control Theory Appl. 6(10), 1388–1399 (2012)
Anton, H.J.: Adaptive spacecraft attitude tracking control with actuator saturation. J. Guid. Control Dyn. 33(5), 1692–1695 (2010)
Chen, Z.Y., Huang, J.: Attitude tracking and disturbance rejection of rigid spacecraft by adaptive control. IEEE Trans. Autom. Control 54(3), 600–605 (2009)
Bustan, D., Sani, S.K., Pariz, N.: Adaptive fault-tolerant spacecraft attitude control design with transient response control. IEEE Trans. Mechatron. 19(4), 1404–1411 (2014)
Ali, I., Radice, G., Kim, J.: Backstepping control design with actuator torque bound for spacecraft attitude maneuver. J. Guid. Control Dyn. 33(1), 254–259 (2010)
Aicardi, M., Cannata, G., Casalino, G.: Attitude feedback control: unconstrained and nonholonomic constrained cases. J. Guid. Control Dyn. 23(4), 657–664 (2000)
Bang, H., Myung, H.S., Tahk, M.J.: Nonlinear momentum transfer control of spacecraft by feedback linearization. J. Spacecr. Rockets 39(6), 866–873 (2002)
Sinclair, A.J., Hurtado, J.E., Junkins, J.L.: Linear feedback control using quasi velocities. J. Guid. Control Dyn. 29(6), 1309–1314 (2006)
Malekzadeh, M.: Flexible spacecraft control using robust feedback linearization. In: Proceedings of 2010th AIAA Guidance, Navigation, and Control Conference. Toronto: American Institute of Aeronautics and Astronautics. AIAA-8295 (2010)
Yao, X.M., Guo, L.: Composite anti-disturbance control for markovian jump nonlinear systems via disturbance observer. Automatica 49, 2538–2545 (2013)
Wei, X.J., Guo, L.: Composite disturbance-observer-based control and terminal sliding mode control for nonlinear systems with disturbances. Int. J. Control 82(6), 1082–1098 (2009)
Chen, M., Chen, W.H.: Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control Signal Process. 24, 51–64 (2010)
Qian C. S., Sun C. Y., Huang Y. Q., et al.: Design of flight control system for a hypersonic gliding vehicle based on nonlinear disturbance observer. In: Proceedings of the 10th IEEE International Conference on Control and Automation. Hangzhou: IEEE press. 1573–1577 (2013)
Wen X.Y., Guo L.: Estimation and rejection for disturbances using composite nonlinear observer. In: Proceedings of 2010 International Conference on Networking, Sensing and Control. 280–284(2010)
Malekzadeh, M., Naghash, A., Talebi, H.A.: A robust nonlinear control approach for tip position tracking of flexible spacecraft. IEEE Trans. Aerosp. Electron. Syst. 47(4), 2423–2434 (2011)
Kristiansen, R., Nicklasson, P.J., Gravdahl, J.T.: Satellite attitude control by quaternion-based backstepping. IEEE Trans. Control Syst. Technol. 17(1), 227–232 (2009)
Xia, Y.Q., Zhu, Z., Fu, M.Y., Wang, S.: Attitude tracking of rigid spacecraft with bounded disturbances. IEEE Trans. Ind. Electron. 58(2), 647–659 (2011)
Khalil, H.K.: Nonlinear Systems. Prentice-Hall, Upper Saddle River (2002)
Acknowledgments
This work was supported by the National Natural Science Foundation of China 10772011, the National Basic Research Program of China (973 Program) 2012CB720003, and the Fundamental Research Funds for the Central Universities YWF-10-01- A22
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, Z., Wu, Z. Nonlinear attitude control scheme with disturbance observer for flexible spacecrafts. Nonlinear Dyn 81, 257–264 (2015). https://doi.org/10.1007/s11071-015-1987-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-1987-3