
Abstract
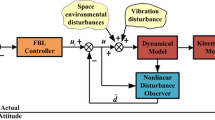
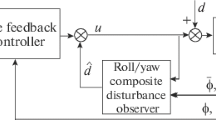
In this paper, a composite attitude control approach for orbiting spacecraft with rigid central hubs and flexible appendages is presented. The established attitude control model consists of the vibration modes excited by the rigid body, the space environment disturbances, the measurement noises, and the model uncertainty. The model is formulated into a dynamic system with two types of disturbance inputs. A composite control law with the simultaneous disturbance attenuation and rejection performance is presented for the flexible spacecraft system subject to multiple disturbances. The disturbance-observer-based control is designed for feedforward compensation of the elastic vibration. The \({H_\infty }\) state-feedback controller is designed to perform the robust attitude control in the presence of the space environment disturbances, measurement noises, and the model uncertainty. Numerical simulations show that the performance of the attitude control systems can be improved by combining the disturbance observer with \({H_\infty }\) state-feedback control.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others

Keywords
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2021 Zhejiang University Press
About this chapter

Cite this chapter
Liu, H., Guo, L., Zhang, Y. (2021). Composite Attitude Control for Flexible Spacecraft with Simultaneous Disturbance Attention and Rejection Performance. In: Footprints in Cambridge and Aviation Industries of China. Springer, Singapore. https://doi.org/10.1007/978-981-16-3176-4_29
Download citation
DOI: https://doi.org/10.1007/978-981-16-3176-4_29
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-3175-7
Online ISBN: 978-981-16-3176-4
eBook Packages: EngineeringEngineering (R0)