
Abstract
Non-dimensional mathematical model of brushless DC motor (BLDCM) system is presented here. BLDCM is known to produce chaotic phenomenon under certain conditions. This paper fuses dynamic surface control, radial basis function neural network, and adaptive technology to control the BLDCM, which overcomes the repetitive differentiation of the nonlinear terms of backstepping and the boundedness hypothesis of control gain pre-determined. The tangent barrier Lyapunov function is also used for time-delay nonlinear system with parametric uncertainties. Simulation results under different conditions indicate that the proposed method works well to suppress chaos and effects of parameter variation.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The dynamics on an attractor is said to be chaotic if there exists exponential sensitivity to initial conditions. For most cases involving differential equations, chaos usually occurs together with geometrical strangeness [1, 2]. In a BLDCM system, the chaotic behavior leads to the intermittent oscillation of torque and speed, irregular current noise of the system, and unstable control performance. Therefore, it intensively influences the stability of the system and safety as well [3]. The advantage of BLDCM is the elimination of the physical contact between the brushes and the commutators. Then, BLDCM is widely applied in direct-drive applications such as robotics [4] and aerospace [5].
For ameliorating the performance of the BLDCM system, a large amount of literatures and control methods have been attempted to apply in the motor drivers. For example, to speed up the error convergence rate, nonsingular fast terminal sliding-mode control (SMC) [6], which can reach finite-time stability, is applied. In Ref. [7], a high-order SMC method via backstepping is presented to attain finite-time tracking control regardless of mismatched disturbance. The Ott, Grebogi, and Yorke (OGY) method is a fundamental technology for controlling chaos [8, 9]; unfortunately, choosing an adjustable parameter usually becomes very difficult. The neural fuzzy control (NFC) approaches can also achieve self-learning; however, it is difficult for online learning real-time control [10, 11]. Chaos anti-control of three time scale brushless DC motors and chaos synchronization of different order systems are studied [12]. Anti-control of chaos of single time scale brushless DC motors and chaos synchronization of different order systems are proposed further [13]. However, neither of them considers the time delay, output constraint, and unknown parameters.
Recently, a barrier Lyapunov function (BLF) which is proposed for constraint handling in Brunovaky-type system and nonlinear systems in strict feedback form are introduced for the special property of approaching infinity whenever its arguments approach some limits [14, 15]. In addition, backstepping design method is an effective tool, which is often applied in nonlinear systems control with non-matching conditions, as well as systems with uncertain functions [16, 17]. However, it suffers from repetitive differentiations. To solve this problem, the DSC is used to successfully overcome the shortage of traditional backstepping, and its first-order low-pass filter is used to gain the derivative information of the virtual control at the design procedure [18, 19]. Control of chaos using the time-delay feedback control technology though is introduced to the real applications [20]. But it suffers from some problems as the control objective must be the equilibrium. Then, an adaptive DSC method is introduced to solve it for a class of uncertain time-delay nonlinear system with state constraint [21]. Using the high-gain observer, an adaptive fuzzy backstepping output feedback control approach is developed for a class of multiple-input and multiple-output (MIMO) nonlinear systems with time delays and immeasurable states [22]. For a class of MIMO stochastic nonlinear systems with immeasurable states, an adaptive fuzzy backstepping output feedback DSC approach is presented [23].
To the best of our knowledge, the combination among adaptive DSC, TBLF, and RBFNN has been seldom applied in the control of chaos for the BLDCM system yet. Further contribution includes the design of adaptive RBFNN DSC controller to handle uncertain time delays and parametric uncertainties. The proposed controller owns the suppression of the chaotic behavior, in addition to driving the system to the pre-defined trajectory with high precision and short response time. Meanwhile, the complexity of the designed controller is reduced, and the design procedure is much simpler than that of traditional backstepping. Simulation results show that control scheme is able to reduce chaos and effects of parameter variation. Similarly, the results are presented to show the effectiveness and robustness to control the BLDCM.
2 System descriptions and mathematical preliminaries
2.1 System descriptions
The brushless DC motor system considered here is illustrated in Fig. 1. It is an electromechanical system, and its equations of electrical and mechanical dynamics can be written in the following forms [12, 24]:
The denotations of the BLDCM system parameters are shown in Table 1. In order to reduce the number of parameters, a transformation is carried out in the next section. Suppose the multiple time scales \(\tau _{1},\,\tau _{2},\, \tau _{3}\) are defined as follows:
where \(\tau _{1},\, \tau _{2}\), and \(\tau _{3}\) denote the mechanical time constant, the first electrical time constant, and the second electrical time constant, respectively.

The brushless DC motor system and its commutation
Then, the new state space model for the BLDCM becomes
where the non-dimensional variables are
It can be easily seen that the mathematical model of BLDCM owns high nonlinearity because of the coupling between the speed and the currents. In Eq. (3), \(T_{\mathrm{L}}\) presents the normalized load torque; \(u_{\mathrm{q}}\) and \(u_{\mathrm{d}}\) denote the normalized quadrature-axis and direct-axis stator voltage, respectively; and \(\sigma ,\, \eta \), and \(\rho \) are unknown system parameters.
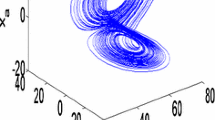
In order to show the computational results such as phase portrait, strange attractor, choose the parameters as \(u_{\mathrm{q}}=4.017\), \(u_{\mathrm{d}} =-15.305,\, \tau _{1}= 1,\, \tau _{2}=6.45,\, \tau _{3}=7.125,\, T_{\mathrm{L}}=2.678\), and select the true values of unknown parameters as \(\sigma =16,\, \rho =1.516\) for chaos condition. The initial conditions of the drive systems are \(x_{1}(0)=x_{2}(0)= x_{3}(0)=0\). Figure 2 illustrates the phase portrait of various \(\eta \). The motion is periodic in the situations of \(\eta =3.0,\, 2.36\). However, in the situations of \(\eta = 2.1,\, 1.6\), the motion appears chaotic behavior, and \(\eta = 2.34\) is a critical value. Figure 3 shows the strange attractor in BLDCM with parameter \(\eta =1.6\). Figure 4 shows the bifurcation diagram.

Phase portrait with different \(\eta \)

Strange attractor with parameter \(\eta = 1.6\)

Bifurcation diagram
A time delay in the overall system can lead to voltage and current distortions due to the low-pass filter, hysteresis control inverter, microprocessor program computation time, and so on. Then, the mathematical model of BLDCM with uncertain nonlinear time delay is rewritten as follows:
where \(\bar{{x}}_2 (t)=[x_1 (t),x_2 (t)]^{T},\Delta f_i (x_i (t-\tau _i )),\, i=1, 2, 3\), denote the nonlinear time delay item, and \(\tau _i ,\, i=1, 2, 3\), stand for the time delay constant.
For any given continuous signal \(y_{\mathrm{r}}\), the dynamics surfaces are defined as
where \(a_{2\mathrm{f}}\) is the filtered virtual controller.
Assumption 1
The nonlinear time delay items satisfy the following inequality:
where the nonlinear functions \(q_{11},\,q_{21},\,q_{22}\), and \(q_{31}\) are known, \(\bar{{S}}_2 (t)=[x_1 (t),x_2 (t)]^{T}\).
Assumption 2
The reference trajectory \(y_{\mathrm{r}}\) is bounded by \(-d\le y_{\mathrm{r}}\le d,\, (a > d > 0)\), and the time derivatives \(y_{\mathrm{r}}^{(1)},\, y_{\mathrm{r}}^{(2)}\) are bounded.
The constraints are not violated in the whole dynamic process. That is, \(x_{1}(t)\in (-a, a),\, \forall t > 0\), where the constant \(a> 0\).
2.2 Tangent barrier function
For the sake of ensuring that system state is bounded in a desired region, a tangent barrier function \(y\, \hbox {tan}(y)\) is employed in this paper, where \(\hbox {tan}(\cdot )\) stands for the tangent function. It is obvious that the tangent barrier function satisfies the characteristics listed as below:
According to the above descriptions, we can formalize the results for general forms of tangent barrier function in Lyapunov synthesis satisfying \(y\hbox {tan}(y)\rightarrow \infty \) as \(y\rightarrow -\pi /2\) or \(y\rightarrow \,\pi /2\).
3 Design of chaos controller based on TBLF
3.1 RBFNN
For the continuous function \(f\left( {\theta ,z} \right) \)and bounded closed set \(\Omega \rightarrow R^{n}\), there is a RBFNN shown in Fig.5, which satisfies
where \(z\in \Omega \subset R^{n}\) is the input vector with \(n\) being the neural network input dimension, \(\Omega \) denotes some compact set in \(R^{n},\,\theta =[\theta _1 ,\theta _2 ,\cdots ,\theta _n ]^{T}\in R^{l}\) is the weight vector, and \(l>1\) is the node number of neuron.\(\varepsilon \) is the estimation error, and \(\xi \left( z \right) =[\xi _1 \left( z \right) ,\xi _2 \left( z \right) ,\cdots ,\xi _n \left( z \right) ]^{T}\in R^{l}\) is a basic function vector.

The structure of the RBFNN
The Gaussian basis function is selected as
where \(\mu _i =\left[ {\mu _{i1} ,\mu _{i2} ,\cdots ,\mu _{in} } \right] ^{T}\) is the center of basic function \(\xi _i \left( z \right) ,\,\sigma _i \) is the width of \(\xi _i \left( z \right) \), and \(\left\| \cdot \right\| \) denotes the 2-norm of a vector.
Define the best weight vector as
Assumption 3
There is a positive constant \(\varepsilon _{M}\) which satisfies \(\left| {\varepsilon _i } \right| \le \varepsilon _{M} ,i=1,2,3\)
3.2 Controller design
Theorem 1
The special case of the Cauchy–Schwarz inequality in a Euclidean space is called Cauchy’s inequality. It is one of the most important inequalities in all of mathematics [25]. It is usually written as
where all of \(r_{i}, \quad s_{i}\in R\).
According to the above-mentioned dynamics system, the whole design process consists of three phases. Then, the process of the design is given in detail.
Step 1: Calculate the derivative of \(S_{1}\)
where \(f_1 =\rho x_2 x_3 -\eta x_1 -T_\mathrm{L} \).
Based on the above description, \(\sigma ,\, \eta \) and \(\rho \) are unknown parameters of system. Then, it is not easy to construct the controller for traditional methods. To cope with this problem, adaptive technique is employed to deal with the unknown gain, and RBFNN is used to approximate the uncertain nonlinear function \(f_{1}\). Therefore, for any given \(\varepsilon { }_1\), there exists a RBFNN \(\theta _1^T \xi { }_1\) such that
where \(\varepsilon { }_1\) is the approximation error and satisfies
Substituting Eq. (13) into Eq. (12), it is obtained
Choose a TBLF candidate as
where the design parameter \(\beta =a-d>0(a>d)\) denotes the constraint on \(S_{1}(t)\). That is, \(S_{1}(t)\in (- \beta ,\, \beta )\).
Then, the time derivative of \(V_{1}\) is calculated by
where \(\hbox {tan}(\cdot )\) and \(\hbox {sec}(\cdot )\) stand for tangent function and secant function, respectively. \(M=\tan (\frac{\pi }{2\beta }S_1 (t))+\frac{\pi }{2\beta }S_1 (t)\sec ^{2}(\frac{\pi }{2\beta }S_1 (t))\) .
According to the Assumption1 and Young’s inequality, there exist
Therefore,
where \(D_1 =S_1^2 \left( {t-\tau _1 } \right) q_{11}^2 \left( {S_1 \left( {t-\tau _1 } \right) } \right) -\sum _{i=1}^2 {S_1^2 \left( {t-\tau _i } \right) q_{i1}^2 \left( {S_1 \left( {t-\tau _i } \right) } \right) } \).
The virtual control and adaptive laws are designed as below:
where \(k_{1},\, m_{1},\,\gamma _{1},c_{1}\), and \(\hbox {a}_{1}\) are the design constants, and \(\eta _{1}\) is a small positive constant.
Remark 1
The estimation errors are given as \(\tilde{\theta }_1 =\mathop {\theta }\limits ^{\frown } _1 -\theta _1\) and \(\tilde{\sigma }=\mathop {\sigma }\limits ^{\frown } -\sigma \), and \(\hat{{\theta }}_1 ,\,\mathop {\sigma }\limits ^{\frown }\) are the estimation of vector \(\theta _{1},\, \mathop {\sigma }\limits ^{\frown }\), respectively.
From the Eq. (19–21), it obtains that
Remark 2
\(-m{ }_1\tilde{\theta }_1 \mathop {\theta }\limits ^{\frown } _1 \le -\frac{1}{2}m{ }_1\tilde{\theta }_1^2 +\frac{1}{2}m{ }_1\theta _1^2 ,\, -c_1 \tilde{\sigma }\mathop {\sigma }\limits ^{\frown } \le -\frac{1}{2}c_1 \tilde{\sigma }^{2}+\frac{1}{2}c_1 \sigma ^{2},\,S_1^2 (t)-\frac{2\beta }{\pi }S_1 (t)M\le S_1^2 (t)\left( {1-\sec ^{2}\left( {\frac{\pi }{2\beta }S_1 (t)} \right) } \right) \le 0\).
Step 2: Filter \(\alpha _{2}\) through the following first-order filter with a time constant \(\tau _{2}\):
Then, one has
Define the filter error of the first-order subsystem: \(y_{2} =\alpha _{2\mathrm{f}}-\alpha _{2}\). Take the time derivative of \(y_{2}\), and obtain
Consequently, a calculation produces the following inequality:
where \(B_{2}\) is the continuous function.
Then, the derivative of \(S_{2}\) is presented as below:
where \(f_2 =-x_2 -x_1 -x_1 x_3\).
To facilitate its application in engineering, the RBFNN is used to approximate the nonlinear function \(f_{2}\) again. So there exists a RBFNN system such that
where \(\varepsilon { }_2\) is the approximation error and satisfies \(\left| {\varepsilon { }_2} \right| \le \varepsilon { }_\mathrm{M}\).
Substituting Eq. (28) into Eq. (27), it yields
Choose the Lyapunov function candidate as below:
The time derivative of \(V_{2}\) is given as below:
Note the following inequality:
Substituting Eq. (32) into Eq. (31), the equation can be rewritten as
where \(D_2 =S_1^2 (t-\tau _2 )q_{21}^2 (S_1 (t-\tau _2 ))\).
In the same way, the control law and adaptive law are given as the following forms:
where \(k_{2},m_{2}\) and \(\gamma _{2}\) are the design constant.
With Eq. (34) and Eq. (35), Eq. (33) is written as follows:
Remark 3
The estimation error is written as \(\tilde{\theta }_2 =\mathop {\theta }\limits ^{\frown } _2 -\theta _2 \), and \(\hat{{\theta }}_2\) is the estimation of vector \(\theta _{2},\,-m{ }_2\tilde{\theta }_2 \mathop {\theta }\limits ^{\frown } _2 \le -\frac{1}{2}m{ }_2\tilde{\theta }_2^2 +\frac{1}{2}m{ }_2\theta _2^2 \).
Step 3: The time derivative of \(S_{3}\) is obtained as
where \(f_3 =x_1 x_2 -x_3 \).
Similarly, for simplicity, there exists a RBFNN system such that
where \(\varepsilon { }_3\) is the approximation error and satisfies
Choose the Lyapunov function candidate as
Then, the derivative of \(V_{3}\) is calculated as below:
According to Eq. (6), the following inequality yields:
Substituting Eq. (41) into Eq. (40), the equation can be rewritten as
At the current stage, the control input is chosen as
where \(k_{3}\) is the positive constant.
In addition, the update law is chosen as follows:
where \(m_{3}\) and \(\gamma _{3}\) are the design constant.
Substituting Eq. (43–44) into Eq. (42), the time derivative of \(V_{3}\) is rewritten as follows:
Remark 4
The estimation error is expressed as \(\tilde{\theta }_3 ={\mathop {\theta }\limits ^{\frown }}_3 -\theta _3 \), and \(\hat{{\theta }}_3\) is the estimation of vector \(\theta _{3},\, -m{ }_3\tilde{\theta }_3 {\mathop {\theta }\limits ^{\frown }} _3 \le -\frac{1}{2}m{ }_3\tilde{\theta }_3^2 +\frac{1}{2}m{ }_3\theta _3^2 \).
Up to now, the whole design process of the controller of BLDCM is completed. The schematic plan of proposed control method is depicted in Fig. 6.

Control schematic of BLDCM
4 Stability analysis
For any given \(p>\)0, the closed sets can be defined as follows:
Theorem 2
Suppose that the dynamic surface controllers Eq. (34) and (43) with adaptive laws Eq. (20),(21) (35), and (44) are applied to the BLDCM system with the uncertain time delays described by Eq. (4), by selecting the proper parameters like \(k_{i},\, \gamma _{i},\, m_{i},\, \Gamma _{1}, \eta _{1},\, \tau _{2}\), and \(\hbox {c}_{1}\), then the \(S_{1}\hbox {(t)}\) is asymptotically tracking stability in the sense of uniformly ultimate boundedness when the initial conditions satisfy the \(\Pi _i\) and \(x_{1}(0)\in (-a+d+y_{\mathrm{r}} (0),\, a-d+ y_{\mathrm{r}} (0))\). Furthermore, the state \(x_{1}(t)\) can keep in the set \(\Omega := \{x_{1}\, \hbox {(t)} \in \quad R: {\vert } x_{1}\, (t){\vert } < a\}\) and error state \(S_{1}(t)\in (-\beta ,\, \beta )\) for \(\forall t > \quad 0\).
Proof
First, calculate the derivative of the Lyapunov function candidate as
If \(V=p\), taking those pre-mentioned into account, then there exists
where \(\mu =\sum _{i=1}^2 {D_i } +\frac{1}{4}B_2^2 +\frac{1}{2}c_1 \sigma ^{2}+\frac{1}{2}\sum _{i=1}^3 {m{ }_i\theta _i^2 } \).
If \(V=p\) and \(a_0 >\mu /p\), then \(\dot{V}\le 0\). As the initial condition \(V(0)\le p\), one has \(V(t)\le \,p,\,\forall t\ge 0\).
Let Eq.(48) be compute the integral on [0 \(t\)], then
Second, note the fact that \(S_{1}\hbox {(t)}\, \hbox {tan}((\pi /2 \beta )\times S_{1}\hbox {(t)})\rightarrow \infty \) as \(S_{1}\hbox {(t)}\rightarrow \beta \) or - \(\beta \). Since \(S_{1}\hbox {(t)}\) and \(S_{1}\hbox {(t)}\, \hbox {tan}((\pi /2 \beta )\times S_{1}\hbox {(t)})\) is uniformly ultimately bounded, there exists \(S_{1}\hbox {(t)} \ne -\beta \) and \(S_{1}\hbox {(t)} \ne \beta \). Let give initial condition \(S_{1}\hbox {(t)}\in (-\beta ,\, \beta )\), it can be concluded that \(S_{1}\hbox {(t)}\) remains in the region \((-\beta ,\, \beta )\) for \(\forall t > 0\). Furthermore, owing to the fact \(\beta = a -d\), the following relations hold:
Then, with the fact \(d +y_{\mathrm{r}} \quad \ge 0\) and \(-d +y_{\mathrm{r}} \le 0\), it is obtained that \(-a < x_{1}\hbox {(t)} < a\). Up to now, the proof is completed.
5 Performance evaluation
In this section, the numerical simulations are conducted in order to validate the feasibility and effectiveness of the proposed method. Meanwhile, it is mainly utilized to verify the performance of the BLDCM with chaotic behavior and parameter variation.
Taking into account uncertain time delay, the relative equations can be described by
The part of system parameters are given as \(q_{11} = 1,q_{21} =1-\sqrt{2-S_1^2},\, q_{22} = {\vert }S_{2}{\vert }, q_{31} = 0,\, \tau _{1}= 0.4,\, \tau _{2} = 0.5,\, \tau _{3}= 0.6\), and the rest are the same as ones mentioned before.
Suppose that the state is required to constraint \({\vert }\hbox {x}_{1}(t){\vert } <1.2\), and the reference signal is \(-1.0\le y_{\mathrm{r}}=0.7^{*}\hbox {sin}(4t) +0.2^{*}\hbox {cos}(2t+0.3)\le 1.0\); meanwhile, the corresponding design parameter is chosen as \(\beta ={\vert }x_{1}{\vert }-{\vert }y_{\mathrm{r}}{\vert }=0.2\). The simulations are done with initial conditions \(x_{1}(0) =0\in (-0.2,0.2),\, x_{2}(0)=0.45,\, x_{3}(0)=0.4\). The design parameters of controller are chosen as \(k_{1}\!=\!k_{2} \!=\!1,\, k_{3} \!=\! 3,\,\gamma _{1} \!=\!\gamma _{2} \!=\! \gamma _{3} \!=\! 12,\, m_{1}\!=\!m_{2}\!=\!m_{3} \!=\! 0.5,\, c_{1} \!=\! 0.8,\,r_{1} = 0.2,\, \sigma (0) = 35,\, \eta _{1}= 0.001,\, \tau _{2}= 0.01\). In addition, the center of neural network \(\mu _{i}\) is uniformly distributed in the field of [\(-\)5,5], and its width \(\sigma _{i}\) is equal to 2.
5.1 Trajectory tracking analysis
Figure 7 shows that the steady-state error of velocity is equal to \(\pm 0.01\, \hbox {Rad/s}\) with little time. On the other hand, it can be seen clearly that the system tracks the desired trajectory perfectly within 0.1s. The state \({\vert }x_{1}(t){\vert }<1.2\) is ensured by the fact that tracking error \(\hbox {S}_{1}(t)\in (-0. 2, 0. 2)\) when the TBLF is used.

The trajectory tracking with parameter \(\eta =1.6\). a The rotor velocity tracking, b the rotor velocity tracking error
5.2 Robustness analysis
Figure 8 shows the results of the BLDCM control performance when disturbance of the system parameters \(\sigma \) and \(\rho \) occurs, i.e., \(\sigma =16,\, \rho =1.516,\, \sigma =17,\, \rho = 1.416,\, \sigma =18,\, \rho =1.316\). When the system parameters add or reduce the value a bit, the three kinds of indicator curves of BLDCM can basically coincide. That is, the proposed controller owns good robustness for disturbance in whole process.

The robustness analysis with parameter variation. a The rotor velocity tracking error, b d axis voltage
5.3 Chaos suppression analysis
Comparing with the result mentioned above, it can be seen clearly that BLDCM system successfully escapes from the chaotic behavior which can cause some irreparable losses on the local power system in the Fig. 9.

Phase portrait with different \(\eta \)
6 Conclusion
An adaptive RBFNN-based DSC strategy is presented for the chaotic BLDCM with uncertain time delays in detail. The controller based on the adaptive DSC, TBLF, and RBFNN is applied to prevent the motor drive system from chaos when systemic parameters are falling into a special area. Both the unknown BLDCM parameters and uncertain time delays are considered. At the same time, the state constraint is satisfied using TBLF. In addition, the stability analysis is derived to verify the system reliability by the Lyapunov theory. Finally, the simulation results are demonstrated to show the effectiveness and robustness of the proposed approach by choosing appropriate design parameters.
References
Ditto, W.L., Spano, M.L., Savage, H.T., Rauseo, S.N., Heagy, J., Ott, E.: Experimental observation of a strange nonchaotic attractor. Phys. Rev. Lett. 65, 533–536 (1990)
Wang, Z., Chau, K.T.: Anti-control of chaos of a permanent magnet DC motor system for vibratory compactors. Chaos Solitons Fractals 36, 694–708 (2008)
Li, D., Wang, S.L., Zhang, X.H., Yang, D.: Fuzzy impulsive control of chaos in permanent magnet synchronous motors with parameter uncertainties. Acta Phys. Sin. 58, 1432–1440 (2009)
Hernandez-Guzman, V.M., Santibanez, V., Zavala-Rio, A.: A saturated PD controller for robots equipped with brushless DC-motors. Robotica 28, 405–411 (2010)
Huang, X.Y., Goodman, A., Gerada, C., Fang, Y.T., Lu, Q.F.: Design of a five-phase brushless DC motor for a safety critical aerospace application. IEEE Trans. Ind. Electron. 59, 3532–3541 (2012)
Feng, Y., Yu, X.H., Man, Z.H.: Non-singular terminal sliding mode control of rigid manipulators. Automatica 38, 2159–2167 (2002)
Estrada, A., Fridman, L.: Quasi-continuous HOSM control for systems with unmatched perturbations. Automatica 46, 1916–1919 (2010)
Alasty, A., Salarieh, H.: Controlling the chaos using fuzzy estimation of OGY and Pyragas controllers. Chaos Solitons Fractals 26, 379–392 (2005)
Paula, A.S.D., Savi, M.A.: A multi-parameter chaos control method based on OGY approach. Chaos Solitons Fractals 40, 1376–1390 (2009)
Zhang, C.M., Liu, H.P., Chen, S.J., Wang, F.J.: Application of neural network for permanent magnet synchronous motor direct torque control. J. Syst. Eng. Electron. 19, 555–561 (2008)
Elmas, C., Ustun, O., Sayan, H.H.: A neuro-fuzzy controller for speed control of a permanent magnet synchronous motor drive. Expert Syst. Appl. 34, 657–664 (2008)
Ge, Z.M., Cheng, J.W., Chen, Y.S.: Chaos anticontrol and synchronization of three time scales brushless DC motor system. Chaos Solitons Fractals 22, 1165–1182 (2004)
Ge, Z.M., Chang, C.M., Chen, Y.S.: Anti-control of chaos of single time scale brushless dc motors and chaos synchronization of different order systems. Chaos Solitons Fractals 27, 1298–1315 (2006)
Ngo, K.B., Mahony, R., Jiang, Z.P.: Integrator backstepping using barrier functions for systems with multiple state constraints. In: Proc 44th IEEE Conf. on Decision and Control, and the European Control Conf., 8306–8312 (2005)
Tee, K.P., Ge, S.S., Tay, E.H.: Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 45, 918–927 (2009)
Luo, X., Wu, X., Guan, X.: Adaptive backstepping control for unmatched nonlinear system against actuator dead-zone fault. IET Control Theory Appl. 4, 879–888 (2010)
Wu, X.L., Wu, X.J., Luo, X.Y., Zhu, Q.M., Guan, X.P.: Neural network-based adaptive tracking control for nonlinearly parameterized systems with unknown input nonlinearities. Neurocomputing 82, 127–142 (2012)
Wei, D.Q., Luo, X.S., Wang, B.H., Fang, J.Q.: Robust adaptive dynamic surface control of chaos in permanent magnet synchronous motor. Phys. Lett. A 363, 71–77 (2007)
Zhang, X.Y., Lin, Y.: A robust adaptive dynamic surface control for nonlinear systems with hysteresis input. Acta Autom. Sin. 36, 1264–1271 (2010)
Ma, H., Deshmukh, V., Butcher, E., Averina, V.: Delayed state feedback and chaos control for time-periodic systems via a symbolic approach. Commun. Nonlinear Sci. Numer. Simul. 10, 479–497 (2005)
Wu, X.J., Wu, X.L., Luo, X.Y., Guan, X.P.: Dynamic surface control for a class of state-constrained non-linear systems with uncertain time delays. IET Control Theory Appl. 6, 1948–1957 (2012)
Li, Y.M., Ren, C.E., Tong, S.C.: Adaptive fuzzy backstepping output feedback control for a class of MIMO time-delay nonlinear systems based on high-gain observer. Nonlinear Dyn. 67, 1175–1191 (2012)
Li, Y., Tong, S.C., Li, Y.M.: Observer-based adaptive fuzzy backstepping dynamic surface control design and stability analysis for MIMO stochastic nonlinear systems. Nonlinear Dyn. 69, 1333–1349 (2012)
Ge, Z.M., Cheng, J.W.: Chaos synchronization and parameter identification of three time scales brushless DC motor system. Chaos Solitons Fractals 24, 597–616 (2005)
Michael Steele, J.: The Cauchy–Schwarz Master Class: An Introduction to the Art of Mathematical Inequalities, Chapter 1. Cambridge University Press, Cambridge (2004)
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant Nos. 51375506), the Specialized Research Fund for the Doctoral Program of Higher Education (Grant No. 20100191110008), China Postdoctoral Science Foundation funded project (Grant No. 2013M542258) and the Par-Eu Scholars Program Special Foundation of Chongqing.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Luo, S., Wang, J., Wu, S. et al. Chaos RBF dynamics surface control of brushless DC motor with time delay based on tangent barrier Lyapunov function. Nonlinear Dyn 78, 1193–1204 (2014). https://doi.org/10.1007/s11071-014-1507-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1507-x