
Abstract
This study investigates the problem of finite-time tracking control for a class of high-order nonlinear systems. Due to the existence of uncertain time-varying control coefficient and unknown nonlinear perturbations in the nonlinear dynamics, the existing finite-time control results cannot solve the finite-time tracking problem for this kind of nonlinear systems. Based on the technique of adding a power integrator a variable structure control method is proposed. Under the proposed control law, it is shown that the reference signal can be tracked in a finite time. As an application of the proposed theoretic results, the problem of finite-time attitude tracking control for the roll channel of bank-to-turn missile is solved. Simulation results are given to demonstrate the effectiveness of the proposed method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider the following \(n\)-order nonlinear systems

where \(x=(x_1,\ldots ,x_n)^T\in R^n\) is the system state, \(u\) is the control law to be designed, \(a(t)\) is uncertain time-varying parameter, \(f(t,x_1,\ldots ,x_n)\) is unknown time-varying nonlinear perturbation, and \(d(t)\) is time-varying external disturbance. The control objective is to design a control law such that the state of system (1) can track the reference signal in a finite time.
Since many practical individual systems, especially mechanical systems, are of high-order dynamics, it is significative and necessary to study control problem for the high-order nonlinear systems. Compared to the conventionally asymptotic tracking control, the closed-loop system with finite-time convergence usually demonstrates faster convergence rates, higher accuracies, better disturbance rejection properties, and robustness against uncertainties [1–4]. Although the finite-time control has these advantages, the stability analysis and controller design for finite-time control systems are very difficult due to the non-smoothness of finite-time controller. In other words, the closed-loop system with finite-time convergence does not satisfy Lipschitz continuity. Although the design of finite-time controller for different dynamic systems is difficult and challenging, there are still some results in the literature, such as finite-time stabilization by state feedback [1, 5–11] and output feedback [12–14], etc.
However, the previous listed finite-time control results cannot solve the finite-time tracking problem for nonlinear system (1) due to the uncertain time-varying control coefficients and unknown external disturbance. This certainly limits the application of finite-time control algorithm in the control practice where exist many nonlinear systems with uncertain time-varying control coefficients and unknown nonlinear perturbations. For example, to design a finite-time control algorithm for the roll angle of BTT (bank-to-turn) missile (see Sect. 4), uncertain time-varying aerodynamic parameters will need to be addressed. It is well-known that in the literature, the terminal sliding mode method [15, 16] can be used to design finite-time controller in the presence of uncertainties and external disturbances. However, as pointed out in [17, 18], there usually is a singularity problem in the terminal sliding mode controller when the order of system is larger than three. Because of such reasons, this paper will employ the technique of adding a power integrator [19] to develop a non-singular high-order finite-time control algorithm for the high-order nonlinear system (1). The design procedure is divided into two steps. First, the technique of adding a power integrator [19] is employed to construct a finite-time tracking control algorithm. Then, based on the variable structure control method, a variable structure finite-time controller is proposed. Rigorous theoretic analysis shows that under the proposed controller the system’s state can reach the desired signal in a finite time.
2 Preliminaries and problem formulation
2.1 Problem formulation
Let \(x^d=(x_1^d,\ldots ,x_n^d)^T\) denote the desired reference state and satisfy
Without loss of generality, assume \(u^d(t)\) is bounded, i.e., \(| u^d(t)|\le L_1<+\infty \), where \(L_1\) is a known constant. The control objective is to design a control law such that the desired state in system (2) can be tracked by the real state of system (1) in a finite time.
In addition, we need to impose the following assumption conditions for the considered system:
Assumption 1
There are known positive constants \(\underline{a},\overline{a},L_2\), and function \(F(x_1,\ldots ,x_n)\) such that
-
(i)
\(\underline{a}\le a(t) \le \overline{a}\),
-
(ii)
\(|f(t,x_1,\ldots ,x_n)|\le F(x_1,\ldots ,x_n)\),
-
(iii)
\(|d(t)|\le L_2\).
Remark 1
It should be pointed out that the considered system (1) in this paper is more general than the double integrators model which is commonly studied in the literature, see for example [3, 5, 12]. First, in practice, the system parameters might not be precisely known due to the lack of detailed knowledge of system specifications. In some cases, the parameters are even varying caused by various reasons such as mechanical wears, model errors, environments changes, etc. A specific example is that the BTT missile model [20, 21] has time-varying aerodynamic parameters, which is shown in Example part. Second, there usually are unknown nonlinear perturbations and external disturbance in the control channel, e.g., the model of BTT missile. Hence, in this paper we consider the systems with unknown parameters and perturbations to encompass more practical systems included BTT missile in applications. In addition, although the problem of finite-time stabilization for double-integrators system has been solved in [3], the proposed method is not available here for system (1) due to the unknown parameters and perturbations.
2.2 Some lemmas
Lemma 1
[1] Consider system \(\dot{x}=f(x), f(0)=0, x\in R^n, \) where \(f(\cdot ):{R}^n\rightarrow {R}^n\) is a continuous vector function. Suppose there exists a continuous, positive definite function \(V(x): U\rightarrow R\) defined on an open neighborhood \(U\) of the origin such that \(\dot{V}(x)+c(V(x))^\alpha \le 0\) on \(U\setminus \{0\}\) for some \(c>0\) and \(\alpha \in (0,1)\). Then, the origin is a finite-time stable equilibrium of system \(\dot{x}=f(x)\) and the finite settling time \(T \) satisfies \(T\le \frac{V(x(0))^{1-\alpha }}{c(1-\alpha )}\).
Lemma 2
[19] If \(0<p=p_1/p_2\le 1,\) where \(p_1>0,p_2>0\) are positive odd integers, then
Lemma 3
[19] For \(x\in R, y\in R,\) \(c>0,d>0\), then
Lemma 4
[22] For \(x_i\in R,i=1,\ldots ,n,\) and a real number \(0< p \le 1\), then
3 Main result
In this section, it will be shown that the problem of finite-time tracking control of nonlinear system (1) is solvable. To solve this problem, a recursive design method is employed. To construct such a finite-time control law, we first define
with a constant \(\tau \in (-1/n,0)\). For simplicity of statement, in this paper, we assume \(\tau =-{q}/{p}\) with a positive even integer \(q\) and a positive odd integer \(p\). Based on this, \(r_i, i=1,\ldots ,n+1\), will be odd in both denominator and numerator, which will simplify the notation of the controller since \(s^{r_i}=\mathrm{sign}(s)\cdot |s|^{r_i}\) for any \(s\in R\). In the case when \(\tau \) cannot be represented as an even/odd ratio, a similar proof can be obtained for any real number \(\tau \) by defining \([s]^{r_i/{r_j}}=\mathrm{sign}(s)\cdot |s|^{r_i/{r_j}}\) as shown in [23].
Now, we present our main result.
Theorem 1
For the nonlinear system (1) under Assumption 1, if the control law \(u\) is designed as
where \(\beta _1,\ldots ,\beta _n\) are appropriate gains, then system’s state will track the desired state (i.e., the state of system (2)) in a finite time, i.e., \(x(t)\rightarrow x_d\) in a finite time.
Proof
Define
as the tracking error, then it follows from system (1) and (2) that the error system’s dynamic is
The finite-time controller design is based on a recursive argument.
Step 1: Construct a Lyapunov candidate
which yields
Denote \(\xi _1=e_1\) and choose the virtual controller
which renders
Step 2: Denote \(\xi _{2}=e_{2}^{1/{r_2}}-{e_{2}^*}^{1/{r_2}}\) and construct the Lyapunov function
We first prove that this Lyapunov function is positive definite. By Lemma 2, we have
then
If \( e_2\ge e_2^*\), by (12) we have
In the case of \( e_2< e_2^*\), the proof is similar and (13) is still true. Based on the definition of \(V_1\), we conclude that \(V_2\) is positive definite.
Together with (9), the derivative of \(V_2\) along system (5) is
Using Lemma 2 and Lemma 3 results in
where \(c_1\) is a positive constant.
Note that
Since \(|e_{2}|=\Big |\xi _{2}+{e_{2}^*}^{1/{r_2}}\Big |^{r_2}\), it follows from Lemma 4 that
In addition, by Lemma 2, we have
Together (18) with (16), (17) and since \(r_2=1+\tau \), it follows from Lemma 3 that
for a positive constant \(c_2\).
Substituting (15) and (19) into (14) gives
Thus, a virtual controller of the form
is such that
Inductive Step: Suppose at step \(k-1\), there are a set of virtual controllers \(e_{1}^{*},\ldots ,e_{k}^{*}\), defined by
with positive constants \(\beta _{1},\ldots ,\beta _{k-1}\), and a \(\mathcal {C}^1\) Lyapunov function
such that
In the sequel, we will show that (25) also holds at step \(k\). To prove this issue, consider the following \(\mathcal {C}^1\) Lyapunov function
Together with (25), the derivative of \(V_k\) along system (1) is
A similar proof as that in Step 2 leads to
for a positive constant \(c_k\). Clearly, we can choose a virtual controller in the form of
such that
which completes the inductive proof.
From the above inductive proof, at step \(n\), we can find series of gains \(\beta _1,\cdots ,\beta _{n-1}\) such that
where \(c_n\) is a positive constant and
Let
and design \(u\) as
Under Assumption 1 and control law (34), it follows from (31) that
Finally, it will be shown that \(V_n\) will reach zero in finite time. Based on the definition of \(V_n\) in (32), and by Lemma 2, we have for \(i=2,\ldots ,n\),
which implies that there is a constant \(\rho >0\) such that
With (35) and (37) in mind, it follows from Lemma 4 that
Noticing \(\tau <0\), by Lemma 1, we conclude that \(V_n\) reaches zero in a finite time, which implies there exists a time \(T <+\infty \), such that \(V_n(t)\equiv 0, \forall t \ge T\), i.e., \(e_i(t)=0,i=1,\cdots ,n\), \(\forall t \ge T\). Thus, the proof is completed. \(\square \)
Remark 2
In the literature, in order to achieve finite-time control for nonlinear systems, an available method is to employ the terminal sliding mode method [15]. Nevertheless, as pointed out in [17, 18], there is a singularity problem in the terminal sliding mode controller when the system is high-order case. However, it should be pointed out that in our proposed finite-time controller (4) which is based on the technique of adding a power integrator [19], there is not any singularity problem.
Remark 3
Note that the discontinues control in the proposed finite-time controller (4) may lead to a chattering phenomenon in practice. To avoid this problem, it is often to use a continuous saturation function \(\mathrm{sat}(\frac{x}{\varepsilon })\) with a small positive constant \(\varepsilon \) instead of the discontinuous function \(\mathrm{sign}(x)\). The modified finite-time control law is given as:
where \(\varepsilon >0\) and the other parameters are the same as that of Theorem 1. Simulation results will demonstrate this case.
4 Example
In this section, we will use one example to illustrate the efficiency of the proposed theoretic result.
Consider the problem of finite-time attitude control of roll channel of bank-to-turn (BTT) missile. From [20, 21], the mathematical model for BTT missile is described as
where \(\gamma \) and \(\omega \) are the roll angle and roll rate, respectively, \(\delta \) is roll control deflection angle, to be designed. Coefficients \(a(t)\) and \(c(t)\) are time-varying aerodynamic parameters of the missile system. \(d(t)\) is time-varying bounded external disturbance. By [20], we know that the parameters \(a(t)\) and \(c(t)\) are usually bounded and satisfy \(a(t)\in [0.491,1.673],c(t)\in [584.220,3045.292]\), which means Assumption 1 holds. Assume the desired signal of the roll angle for the missile is \(\gamma _d(t)=10-\sin (t)\).
According to Theorem 1, we can design finite-time attitude tracking controller in the form of
where \(\beta _1,\beta _2\) are appropriate gains.
In simulation, as shown in [24], to simulate the time-varying aerodynamic parameters, the time-varying parameters are given as follows:
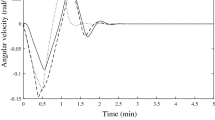
where \(a(t_j)\) is the parameter’s value at different operation points given in Table 1. The time-varying parameter \(c(t)\) is given by the same way. In addition, the external disturbance is given as: \(d(t)=1.1\mathrm{sin}(8t-1),\) which implies \(L_2\) can be selected as \(L_2=1.1.\) By a careful calculation, the controller gains can be chosen as \(\beta _2=20,\beta _1=10, \; \mathrm{and} \; \tau =-2/5\). Under the proposed finite-time controller (4), the response curves of the closed-loop systems (41, 40) are shown in Fig. 1, respectively, where the initial conditions are chosen as \(\gamma (0)=20,\omega (0)=0\). It is easy to see that the roll angle will track the reference signal.

The response curves of the BTT missile under the proposed finite-time controller (41)
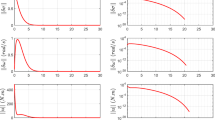
In addition, from the control response curves, i.e., Fig. 1, it can be found that there is a chatting phenomenon in the finite-time controller (41). To this end, we use the modified finite-time control law (39) with \(\varepsilon =0.1\). The response curves of closed-loop systems (39, 40) are shown in Fig. 2. It is clear that the chatting phenomenon can be avoided.

The response curves of the BTT missile under the modified finite-time control law (39)
5 Conclusions
In this paper, we have studied the problem of finite-time tracking control for a class of high-order nonlinear systems. Rigorous theoretic analysis shows that the proposed finite-time algorithm can deal with the case with uncertain time-varying control coefficient and unknown nonlinear perturbations. Future works include how to extend the result of this paper to output feedback case.
References
Bhat, S.P., Bernstein, D.S.: Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38(3), 751–766 (2000)
Ding, S., Li, S., Li, Q.: Disturbance analysis for continuous finite-time control systems. J. Control Theory Appl. 7(3), 271–276 (2009)
Li, S., Du, H., Lin, X.: Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics. Automatica 47(8), 1706–1712 (2011)
Du, H., Li, S., Qian, C.: Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans. Autom. Control 56(11), 2711–2717 (2011)
Bhat, S.P., Bernstein, D.S.: Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 43(5), 678–682 (1998)
Wang, Z., Li, S., Fei, S.: Finite-time tracking control of a nonholonomic mobile robot. Asian J. Control 11(3), 344–357 (2009)
Yang, X., Wu, Z., Cao, J.: Finite-time synchronization of complex networks with nonidentical discontinuous nodes. Nonlinear Dyn. 73(4), 2313–2327 (2013)
Hong, Y., Xu, Y., Huang, J.: Finite-time control for robot manipulators. Syst. Control Lett. 46(4), 185–200 (2002)
Huang, X., Lin, W., Yang, B.: Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 41(5), 881–888 (2005)
Zhao, D., Li, S., Zhu, Q., Gao, F.: Robust finite-time control approach for robotic manipulators. IET Control Theory Appl. 4(1), 1–15 (2010)
Sun, H., Li, S., Sun, C.: Finite time integral sliding mode control of hypersonic vehicles. Nonlinear Dyn. 73(1–2), 229–244 (2013)
Hong, Y., Huang, J., Xu, Y.: On an output feedback-time stabilization problem. IEEE Trans. Autom. Control 46(2), 305–309 (2001)
Frye, M., Ding, S., Qian, C., Li, S.: Fast convergent observer design for output feedback stabilization of a pvtol aircraft. IET Control Theory Appl. 4(4), 690–700 (2010)
Tian, W., Du, H., Qian, C.: A semi-global finite-time convergent observer for a class of nonlinear systems with bounded trajectories. Nonlinear Anal. Real World Appl. 13(4), 1827–1836 (2012)
Yu, X., Man, Z.: Model reference adaptive control systems with terminal sliding modes. Int. J. Control 64(6), 1165–1176 (1996)
Yang, J., Li, S., Su, J., Yu, X.: Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances. Automatica 49(7), 2287–2291 (2013)
Park, K.B., Lee, J.J.: Comments on “A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators”. IEEE Trans. Autom. Control 41(5), 761–762 (1996)
Feng, Y., Yu, X., Man, Z.: Non-singular terminal sliding mode control of rigid manipulators. Automatica 38(9), 2159–2167 (2002)
Qian, C., Lin, W.: A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control 46(7), 1061–1079 (2001)
Duan, G., Wang, H.: Parameter design of smooth switching controller and application for bank-to-turn missiles. Aerosp. Control 23(2), 41–46 (2005). (in Chinese)
Tan, F., Duan, G.: Global stabilizing controller design for linear time-varying systems and its application on BTT missiles. J. Syst. Eng. Electron. 19(6), 1178–1184 (2008)
Hardy, H., Littlewood, J.E., Polya, G.: Inequalities. Cam- bridge University Press, Cambridge (1952)
Polendo, J., Qian, C.: An expanded method to robustly stabilize uncertain nonlinear systems. Commun. Inform. Syst. 8(1), 55–70 (2008)
Li, S., Yang, J.: Robust autopilot design for bank-to-turn missiles using disturbance observers. IEEE Trans. Aerosp. Electron. Syst. 49(1), 558–579 (2013)
Acknowledgments
This work is supported by National Natural Science Foundation of China (61304007), National Natural Science Funds of China for Distinguished Young Scholar (50925727), Key Grant Project of Chinese Ministry of Education (313018), China Postdoctoral Science Foundation Funded Project (2012M521217), Natural Science Foundation of Anhui Province of China (1308085QF106), Anhui Provincial Science and Technology Foundation of China (1301022036), Ph.D. Programs Foundation of Ministry of Education of China (20130111120007), and Fundamental Research Funds for the Central Universities of China (2012HGBZ0205, 2012HGQC0002).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Cheng, Y., Du, H., He, Y. et al. Finite-time tracking control for a class of high-order nonlinear systems and its applications. Nonlinear Dyn 76, 1133–1140 (2014). https://doi.org/10.1007/s11071-013-1196-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1196-x