
Abstract
This study investigates the tracking control problem for the longitudinal model of an airbreathing hypersonic vehicle (AHV) with external disturbances. By introducing finite time integral sliding mode manifolds, a novel finite time control method is designed for the longitudinal model of an AHV. This control method makes the velocity and altitude track the reference signals in finite time. Meanwhile, considering the large chattering phenomenon caused by high switching gains, an improved sliding mode control method based on nonlinear disturbance observer is proposed to reduce chattering. Through disturbance estimation for feedforward compensation, the improved sliding mode controller may take a smaller value for the switching gain without sacrificing disturbance rejection performance. Simulation results are provided to confirm the effectiveness of the proposed approach.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The design of a control system for an airbreathing hypersonic vehicle (AHV) is a challenging task due to the inherently nonlinear dynamics, such as strong couplings between the engine and flight dynamics [1, 2], variation of atmospheric conditions as well as physical and aerodynamic parameters [2, 3], nonminimum phase behavior [4, 5], etc.
In the past decades, the study of AHV mainly concentrates on altitude, velocity, and attitude control. The attitude control problem is discussed in [6–10]. In this paper, the velocity and altitude control problem is considered, which will be presented as follows.
Up to date, many meaningful results have been reported for the longitudinal model of an AHV. Based on the model obtained by approximate linearization in given flight conditions, some control methods are available in the literature, for example, linear stochastic robust control [11], guaranteed cost control [12], and multiobject fault-tolerant control [13]. Although these methods can improve the performance of system from different aspects, thus designed controllers may cause unsatisfactory performance when operating states are far from selected operating points. To further improve the control performance of system, many nonlinear control strategies based on a nonlinear model have been proposed for the longitudinal mode in the last decades, including adaptive control [14–16], robust control [17, 18], H ∞ control [19], sliding mode control [3, 20], fuzzy-logic control [21, 22], neural-network control [23–25], and so on.
It is well known that sliding mode control is an efficient method to deal with nonlinear perturbations, external disturbances and parametric uncertainties. Thus, such method can make the closed-loop system has a good robust and disturbance rejection performance. Generally, in most of the sliding mode control schemes for nonlinear systems, a linear sliding mode surface is employed to design a controller [26, 27]. However, such linear sliding mode only guarantees system states converge to an equilibrium point in infinite time.
In order to enhance the convergence speed of a sliding mode control system, a solution is to employ nonlinear sliding mode manifolds. One of such manifolds is the terminal sliding mode (TSM). TSM control can guarantee system state convergence to an equilibrium point in finite time, which is different from conventional sliding mode control. Besides an advantage of finite time convergence, TSM control also has a better disturbance rejection performance. Hence, TSM has been widely applied to kinds of fields, for instance, spacecraft control systems [28], robotic control systems [29], missile control systems [30, 31], etc. However, the TSM controller may cause the closed-loop system to be singular. To avoid a singularity problem, a switching control technique is employed in [32]. This control scheme can drive the trajectory to a specified open region in which the terminal sliding mode control is not singular. However, it does not fundamentally solve the singular problem. To this end, a nonsingularity TSM is designed in [29], but this result is only used in a second-order system. For a kind of higher order systems, a kind of finite time integral sliding mode is presented in [33].
The above mention results face an unavoidable application problem-chattering. To alleviate the chattering phenomenon, one of the solutions is to employ a saturation function instead of sign function in the control input [3]. However, to do this, the disturbance rejection performance is sacrificed to some extent. Another efficient method for alleviating the chattering problem is to employ a disturbance observer to estimate the disturbances. The disturbance estimation is used for compensation. The disturbance observer technique is first proposed in [34], and up to now, disturbance observer based control (DOBC) schemes for linear and nonlinear systems have been studied and applied in many control fields, e.g., robotic systems [35], grinding systems [36], hard disk drive systems [37, 38], nonlinear MAGnetic LEViation (MAGLEV) suspension systems [39] and general systems [40–42], and the references therein.
In this paper, the tracking control problem for the longitudinal model of an AHV is considered in the presence of external disturbances. By introducing finite time integral sliding mode manifolds, a novel finite time sliding mode controller is designed for the longitudinal model of an AHV, which guarantees that the closed-loop system has good disturbance rejection and tracking performance. However, such a signum function is used in the controller; it will lead to chattering phenomenon in a closed-loop system. In addition, the switching gain of the sliding mode controller should be larger than the bound of the disturbances. If there is no precise estimation on the bound of disturbances, the switching gain will be conservatively selected to be high enough, which worsens the chattering phenomenon. Then, to reduce the chattering, an efficient disturbance estimation technique, nonlinear disturbance observer (NDOB), is employed to estimate the disturbances. After disturbance compensation based on NDOB, the switching gain only needs to be larger than the bound of the disturbance compensation error, which is usually much smaller than that of the disturbances. Hence, the chattering will be reduced while the disturbance rejection performance of the closed-loop system can be maintained. Thus, an improved sliding mode control scheme is proposed by combination of finite time integral sliding mode control method and NDOB technique. Finally, simulation results are given to confirm the effectiveness of the proposed approach.
The rest of the paper is organized as follows. In the next section, model description is given. The input-output linearization model of the longitudinal dynamics of the hypersonic vehicle is presented in Sect. 3. The main results are shown in Sect. 4, where a tracking controller is developed by combining the finite time integral sliding mode control method and the disturbance observer technique. In Sect. 5, simulation results are discussed. Conclusions are presented in Sect. 6.
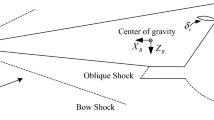
2 Model and problem formulation
The longitudinal model of an AHV is described as [3]





where

\(\bar{q}\) is the dynamic pressure and satisfies \(\bar{q}=\frac{1}{2}\rho V^{2}\). V, γ, h, α, and q are velocity, flight path angle, altitude, angle of attack, pitch rate of an AHV, respectively. T, D, L, M yy , δ E , and β mean thrust, drag, lift, pitching moment, the elevator deflection angle, the throttle setting, respectively. d 2(t) represents external disturbances. m, ρ, I yy , S, μ, R e denote mass of hypersonic vehicle, density of air, moment of inertia, reference area, gravitational constant, radius of the earth, respectively. \(\bar{c}\) and c e are constants.
The engine dynamics are modeled by a second-order system [3]

where β c denotes the demand of the control input, and d 1(t) means external disturbance torques and generalized elastic forces. Moreover, the outputs are the velocity V and the altitude h.
Assumption 1
The external disturbances d i (t) and its first time derivative are assumed to be bounded by known constants, i.e., |d i (t)|≤c i , \(|\dot{d}_{i}(t)|\leq \bar{c}_{i}\), where \(c_{i},\bar{c}_{i}\) are known constants, i=1,2.
Control object
In this paper, we aim at designing a controller such that the velocity V and the altitude h track the reference signals V d and h d in finite time in the presence of external disturbances, respectively.
3 Input–output linearization
The longitudinal model of an AHV described by (1)–(6) can be rewritten as

where f(x), g k (x) are smooth functions in R n.
Using the Lie derivative notation, the derivative of y i in system (7) can be described as

where the Lie derivatives are defined as

and \(L_{g_{k}}(L_{f}^{j-1}(h_{i}))\) satisfies the following conditions:

Then (r 1,…,r m ) is the relative degree of the nonlinear system. If r=r 1+⋯+r m =n, the nonlinear system can be completely transformed to a linear system. If r<n, the nonlinear system can only partially linearized. In this case, the stability of the system (7) relies on the stability of zero dynamics.
Employing the aforesaid technique to the longitudinal model of an AHV, we can calculate the differential of the system outputs V and h until the control inputs come in the final functions. Based on this goal, the output dynamics V and h can be obtained by differentiating three times and four times as below. So, r=4+3=7=n, the longitudinal model can be completely feedback linearized as the following form:


In (11),

where x T=[V γ α β h], f 1(x) and f 2(x) are the expression of (1) and (2), respectively, \(\varpi_{1}=\frac{\partial f_{1}(x)}{\partial x}\), \(\varpi_{2}=\frac{\partial \varpi_{1}(x)}{\partial x}\), \(\varphi_{1}=\frac{\partial f_{2}(x)}{\partial x}\), \(\varphi_{2}=\frac{\partial \varphi_{1}(x)}{\partial x}\). The detailed expressions for ϖ 1, ϖ 2, φ 1, φ 2 are listed in the Appendix. The expression of second derivatives for α and β can be regarded as


where


Defining \(\ddot{x}_{0}^{T}= [ \ddot{V} \ \ \ddot{\gamma} \ \ \ddot{\alpha}_{0} \ \ \ddot{\beta}_{0} \ \ \ddot{h} ] \), the output dynamics of V and h can be rewritten as


where

Systems (17) and (18) can be expressed as

where

Assumption 2
The input matrix B is nonsingular.
Remark 1
The matrix B turns to be singular in the case of a vertical flight path, i.e., \(\gamma=\pm\frac{\pi}{2}\) [3, 45]. Since γ is quite small during the cruise phrase [16, 46], this assumption is reasonable.
4 Tracking controller design
In this section, two different controllers are developed to ensure the disturbance rejection performance of system. Before giving the controller design, some lemmas are presented which will be used in the subsequent control development and analysis.
Lemma 1
[47]
Consider the following system:

Suppose there exists a continuous function V(x):U→R such that
-
1.
V(x) is positive definite.
-
2.
There exist real numbers c>0 and α∈(0,1) and an open neighborhood U 0⊂U of the origin such that \(\dot{V}(x)+cV^{\alpha}(x)\leq0, x\in U_{0}\setminus \{0\}\).
Then the origin is a finite-time stable equilibrium of system (20). If U=U 0=R n, the origin is a globally finite time stable equilibrium of (20).
Lemma 2
[48]
Consider the following system:

If the controller is designed as

the closed-loop system (21) and (22) is globally finite time stable, where \(\alpha_{i-1}=\frac{\alpha_{i}\alpha_{i+1}}{2\alpha_{i+1}-\alpha_{i}}\), i=2,3,…,n, α n =α, α n+1=1, α∈(1−ε,1), ε∈(0,1), and k 1,…,k n ensure that s n+k n s n−1+⋯+k 1=0 is Hurwitz.
Lemma 3
[49]
For x i ∈R, i=1,…,n, 0<p≤1 is a real number, then the following inequality holds:

4.1 Sliding mode tracking controller design
Theorem 1
Consider system (19) with Assumptions 1 and 2, velocity V, and altitude h track the reference signals V d and h d in finite time, respectively, if the controller is designed as

where η i ≥a i +c 1|b i1|+c 2|b i2|, a i >0 is a constant, i=1,2.
Proof
Inspired by [33], two decoupled sliding mode manifolds s 1 and s 2 are chosen as


Computing the derivatives of s 1 and s 2 along system (19), we obtain


Equations (26) and (27) can be rewritten as

where

Choose the Lyapunov function as

Computing the first order derivative of V 1 along system (28), one obtains

Substituting control law (23) into system (30), yields

According to Assumption 1, |d i (t)|≤c i , hence (31) can be expressed as

Choose η i ≥a i +c 1|b i1|+c 2|b i2|, a i >0, i=1,2, (32) can be rewritten as

From Lemma 3, the following inequality is true:

where a=min{a 1,a 2}. According to Lemma 1, system signals can reach the sliding mode manifolds in finite time, i.e., s i =0,i=1,2. When s i =0, we have


Furthermore, the systems (35) and (36) can be rewritten as


Based on Lemma 2, e v , e h can converge to zero in finite time, i.e., V and h track the reference signals V d and h d in finite time, respectively. □
Remark 2
The external disturbances are the main problems to be handled. To guarantee that the closed-loop system has a good disturbance rejection performance, the switching gain needs to be chosen larger than the bound of the external disturbances. If there is no precise information on the bound of the disturbances, the switching gain will be taken to be large enough. This inaccuracy worsens the chattering caused by sliding mode control.
4.2 An improved sliding mode tracking controller design based on NDOB
An efficient disturbance estimation technique, i.e., NDOB, is introduced to estimate the disturbances of the system. The disturbance estimation will be used as a compensation term in the controller. After disturbance compensation based on NDOB, the switching gain only needs to be taken larger than the bound of the disturbance compensation error, which is usually much smaller than that of the external disturbances.
4.2.1 Nonlinear disturbance observer design
A NDOB is provided as follows.
Theorem 2
Consider system (19) with Assumption 1. The disturbance estimation given by

converges to a neighborhood
Ω
0
of the real value of the disturbances, where
\(\varOmega_{0}= \{ {\hat{{d}}} \mid \|{\hat{{d}}}\|\leq\|{d}\|+\frac{\bar{c}}{\theta_{1}\varGamma_{{\min}}} \}\),  , Γ
min=min{Γ
1,Γ
2}, 0<θ
1<1, \(\bar{c}=\sqrt{\bar{c}^{2}_{1}+\bar{c}^{2}_{2}}\), (⋅)′ denotes the derivative of (⋅).
, Γ
min=min{Γ
1,Γ
2}, 0<θ
1<1, \(\bar{c}=\sqrt{\bar{c}^{2}_{1}+\bar{c}^{2}_{2}}\), (⋅)′ denotes the derivative of (⋅).
Proof
The disturbance estimation dynamics are presented as

where \(e_{1}(t)={d}_{1}(t)-\hat{d}_{1}(t)\), \(e_{2}(t)={d}_{2}(t)-\hat{d}_{2}(t)\). The disturbance estimation error dynamics are described as

Choose the Lyapunov function as

where e T=[e 1 e 2]. Taking the derivative of (42) along the error dynamics (41), we obtain


According to Assumption 1, \(|\dot{ d}_{i}|\leq\bar{c}_{i}\), one has

Equation (45) is rewritten as

Let \(\varOmega_{1}= \{e \mid \|{e}\|\leq\frac{{\bar{c}}}{\theta_{1}\varGamma_{\min}} \}\). If e∉Ω 1, we have

There are two cases for all initial states. One case is that they are outside of Ω 1. Since \(\dot{V}_{e}<0\), there exists a t 2 such that e(t 2)∈bdΩ 1, where bdΩ 1 denotes the boundary of the Ω 1. Another case is that they are in Ω 1. If e remains in Ω 1 and never goes across it, we do not need to prove it. We only consider the case that e will escape from Ω 1. For this case, there also exists a t 2>0 such that e∈bdΩ 1. Now let us prove that e∈Ω 1 for every t∈[t 2,∞). The proof is inspired by [47].
Let \(p=\inf_{{e}_{\hat{\bar{d}}}\in bd\varOmega_{1}}\|{e}\|^{2}\), then \(p=\frac{\varsigma^{2}}{(\theta_{1} \varGamma_{\min})^{2}} \).
Furthermore, we obtain

Since V e is continuous, it obtains that there exists a n>0 such that e∈Ω 1 for all t∈[t 2,t 2+n). Suppose that there exists a h 0∈[t 2,∞) such that e∉Ω 1. Then there exists a δ∈(t 2,h 0) such that e(δ)∈bdΩ 1.
Noting that \(\dot{V}_{e}\leq-(1-\theta_{1})\varGamma_{\min}p<0\), and according to the continuity of V e , there exists an arbitrarily small n 1>0 such that V e is monotonously decreasing on [δ−n 1,δ).
Now we have

which is a contradiction. Hence, we reach a conclusion e∈Ω 1, ∀t≥t 2. □
Remark 3
On the basis of above analysis, it can be seen that the estimation errors depend on parameter Γ. By choosing appropriate parameter, the estimation errors can be forced to be small enough such that the disturbances are effectively estimated by a NDOB.
Remark 4
It is worth pointing out that, although the upper bound of the derivative of the disturbances, \(\bar{c}_{i}\), is employed to analyze the region of disturbance estimation errors, it is not needed to estimate this parameter because the design of disturbance observer and control law does not refer to such a parameter.
4.2.2 Composite controller design
Theorem 3
Consider system (19). If Assumption 2 holds, the improved sliding mode controller given by

guarantees that velocity V and altitude h track the reference signals V d and h d in finite time with the sliding mode manifolds presented by (24) and (25), where \(\hat{{d}}_{i}\) is obtained by (39) with Γ i >0, and \(\bar{\eta}_{i}\geq a_{i}+ \kappa_{1}|b_{i1}|+\kappa_{2}|b_{i2}|\), a i >0 is a constant, κ i is the bound of disturbance estimation error, i=1,2.
Proof
Choose the Lyapunov function as

Taking the derivative of (49) along the system (28) and (41), we have

Substituting control law (48) into (50), leads to

According to Theorem 2, we have |e i |≤κ i , hence, (51) can be rewritten as

Similar to the proof of Theorem 1, we obtain that V and h track the reference signals V d and h d in finite time, respectively. □
Remark 5
The difference between Theorems 1 and 3 is that a feedforward compensation term is introduced into controller in Theorem 3. When the parameter of the disturbance observer is appropriately chosen, d i (t) will be well estimated. Usually, the bound of disturbance compensation errors can be less than the disturbances. In this case, the composite controller may select a smaller value for the switching gain without sacrificing disturbance rejection performance, which helps to reduce large chattering caused by high gain.
Remark 6
In the proof process of Theorem 3, as shown in (51), it contains the compensated disturbance \({d}_{i}(t)-\hat {{d}}_{i}(t)\). According to Theorem 2, the disturbance estimation error will be bounded. So the signum function \(\bar{\eta}_{i}\rm{sign}(s_{i})\) in the controller (48) can suppress the compensated disturbance error by choosing \(\bar{\eta}_{i}\) bigger than the bound of \(b_{i1}({d}_{i}(t)-\hat {{d}}_{i}(t))\). This can guarantee the stability of integrated controller and observer.
5 Simulation results
In this section, simulation results are provided to confirm the effectiveness of the proposed method in the above section. As a representative case study, the vehicle is initially trimmed at \(V=15060~\mathrm{ft/s}\) and h=110000 ft. The model parameters are given as [45]

To show the robustness of the proposed controller, parameter uncertainties are chosen as △m=−0.03, △I=−0.03, while △S=0.03, \(\triangle \bar{c}=0.03\), △ρ=0.03, △c e =0.03. The external disturbances are given as d 1(t)=sin(0.2t), d 2(t)=0.1sin(0.2t), which are imposed on the system at t=30 s.
The reference commands for h d and V d are chosen as 112000 ft and \(15160~\mathrm{ft/s}\), respectively.
5.1 sliding mode tracking controller
The tracking control problem for the longitudinal model of an AHV is simulated in this subsection to testify the performance of the sliding mode tracking controller (23).
The controller parameters are chosen as

The response curves of altitude and velocity are shown in Fig. 1(a) and (b), which demonstrate that the sliding mode controller can obtain a good tracking performance. Figure 1(f) depicts the curves of sliding mode manifolds. From these, we can see that the sliding mode manifolds are stable in spite of external disturbances and parametric uncertainties. Curve of the throttle setting of engine β is presented in Fig. 1(d).



Response curves of hypersonic vehicles variables under controller (23) (a) altitude h, (b) velocity V, (c) elevator deflection angle δ E , (d) throttle setting of engine β, (e) the demand of control input β c , (f) sliding mode manifolds S h and S V
In order to suppress external disturbances and parameter uncertainties, the controller employs a standard sliding mode control method, by which external disturbances and parameter uncertainties are assumed to be bounded. However, this approach faces an unavoidable application problem: chattering, which is presented in Fig. 1(c) and (e).
5.2 Comparison results
In order to demonstrate the effectiveness of the proposed composite control strategy (48), the controller (23) is used for comparison. The parameters of two controllers are listed as

The difference between (53) and (54) is that switching gains in (54) are smaller than those in (53).
As presented in Fig. 2(a) and (b), the proposed composite controller (48) works effectively and achieves the control target in the existence of the external disturbances and parametric uncertainties, but the controller (23) with small switching gains does not obtain good control performance.


Response curves of hypersonic vehicles variables (a) altitude h, (b) velocity V, (c) elevator deflection angle δ E , (d) throttle setting of engine β, (e) the demand of control input β c , (f) sliding mode manifolds S h and S V , (g) d 1 and \(\hat{{d}}_{1}\), (h) d 2 and \(\hat{{d}}_{2}\)
Figure 2(c) and (e) depict curves of the control inputs δ E and β c , respectively. It can be seen that the undesired chattering is reduced under these two controllers. Note that the disturbance rejection performance of the closed-loop system cannot be maintained under controller (23) with small switching gains. However, the composite controller (48) can select small value for the switching gain without sacrificing disturbance rejection performance. This is because disturbance observer technique is employed to estimate the parametric uncertainties and external disturbances. Thus, the external disturbances and parameter uncertainties can be compensated by the estimated value in the control input.
Figure 2(d) describes the curve of the throttle setting of engine β. The disturbance estimation results illustrated in Fig. 2(h) and (i) demonstrate the effectiveness of proposed composite control method. These figures show that the NDOBs can effectively estimate the disturbances. Curves of the sliding mode manifolds under controller (48) are demonstrated in Fig. 2(f) to confirm the effectiveness of the proposed composite controller.
6 Conclusions
In this paper, the tracking control problem for the longitudinal model of an AHV subject to external disturbances has been discussed. First, by employing finite time integral sliding mode manifolds, a finite time sliding mode control method has been proposed. This control method can make the velocity and altitude track the reference signals in finite time. Then to reduce the chattering without sacrificing the disturbance rejection performance of system, an improved finite time sliding mode control method based on NDOB technique has been developed. Finally, simulation results have been presented to confirm the effectiveness of the proposed methods.
References
Fidan, B., Mirmirani, M., Ioannou, P.A.: Flight dynamics and control of air-breathing hypersonic vehicles: review and new direction. In: AIAA International Space Planes and Hypersonic Systems and Technologies, AIAA Paper 2003-7081, Norfolk, Virginia (2003)
Bolender, M.A., Doman, D.B.: Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle. J. Spacecr. Rockets 44(2), 374–387 (2007)
Xu, H.J., Mirmirani, M.D., Ioannou, P.A.: Adaptive sliding mode control design for a hypersonic flight vehicle. J. Guid. Control Dyn. 27(5), 829–838 (2004)
Parker, J.T., Serrani, A., Yurkovich, S., Bolender, M.A., Doman, D.B.: Control-oriented modeling of an air-breathing hypersonic vehicle. J. Guid. Control Dyn. 30(3), 856–869 (2007)
Fiorentini, L., Serrani, A., Bolender, M.A., Doman, D.B.: Nonlinear control of non-minimum phase hypersonic vehicle models. In: American Control Conference, St. Louis, MO, USA, pp. 3160–3165 (2009)
Shtessel, Y., McDuffie, J., Jackson, M., et al.: Sliding mode control of the x-33 vehicle in launch and re-entry modes. In: AIAA Guidance, Navigation, and Control Conference and Exhibit, AIAA Paper 1998-4414 (1998)
Costa, R.R.da., Chu, Q.P., Mulder, J.A.: Reentry flight controller design using nonlinear dynamical inversion. J. Spacecr. Rockets 40(1), 64–71 (2003)
Jiang, B., Gao, Z.F., Shi, P., Xu, Y.F.: Adaptive fault-tolerant tracking control of near-space vehicle using Takagi–Sugeno fuzzy models. IEEE Trans. Fuzzy Syst. 18(5), 1000–1007 (2010)
Xu, Y.F., Jiang, B., Tao, G., Gao, Z.F.: Fault tolerant control for a class of nonlinear systems with application to near space vehicle. Circuits Syst. Signal Process. 224(5), 587–598 (2010)
Gao, Z.F., Jiang, B., Shi, P., Xu, Y.F.: Fault-tolerant control for a near space vehicle with a stuck actuator fault based on a Takagi–Sugeno fuzzy model. Proc. Inst. Mech. Eng., Part I, J. Syst. Control Eng. 224(5), 587–598 (2010)
Marrison, C.I., Stengel, R.F.: Design of robust control systems for a hypersonic aircraft. J. Guid. Control Dyn. 21(1), 58–63 (1998)
Gao, H.J., Si, Y.L., Li, H.Y., Hu, X.X., Wang, C.H.: Modeling and control of an air-breathing hypersonic vehicle. In: Proceedings of the 7th Asian Control Conference, Hong Kong, pp. 304–307 (2009)
Li, H.Y., Wu, L.G., Si, Y.L., Gao, H.J., Hu, X.X.: Multi-objective fault-tolerant output tracking control of a flexible air-breathing hypersonic vehicle. Proc. Inst. Mech. Eng., Part I, J. Syst. Control Eng. 224(6), 647–667 (2010)
Gibson, T.E., Crespo, L.G., Annaswamy, A.M.: Adaptive control of hypersonic vehicles in the presence of modeling uncertainties. In: American Control Conference, St. Louis, MO, USA, pp. 3178–3183 (2009)
Fiorentini, L., Serrani, A., Bolender, M.A., Doman, D.B.: Nonlinear robust/adaptive controller design for an air breathing hypersonic vehicle model. In: AIAA Guidance, Navigation and Control Conference and Exhibit, AIAA Paper 2007-6329, Hilton Head, SC (2007)
Fiorentini, L., Serrani, A., Bolender, M.A., Doman, D.B.: Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles. J. Guid. Control Dyn. 32(2), 402–417 (2009)
Wang, Q., Stengel, R.F.: Robust nonlinear control of a hypersonic vehicle. J. Guid. Control Dyn. 23(4), 577–585 (2000)
Marrison, C.I., Stengel, R.F.: Design of robust control systems for a hypersonic aircraft. J. Guid. Control Dyn. 21(1), 58–63 (1998)
Liu, Y.B., Lu, Y.P.: Longitudinal inversion control based on H ∞ optimal control theory for hypersonic vehicle. J. Syst. Eng. Electron. 28(12), 1882–1885 (2006) (in Chinese)
Li, H.F., Sun, W.C., Li, Z.Y.: Index approach law based sliding control for a hypersonic aircraft. In: International Symposium on Systems and Control in Aerospace and Astronautics, Shenzhen, China, pp. 1–5 (2008)
Li, H.B., Sun, Z.Q., Min, H.B., Deng, J.Q.: Fuzzy dynamic characteristic modeling and adaptive control of nonlinear systems and its application to hypersonic vehicles. Sci. China Ser. F 54(3), 460–468 (2011)
Hu, Y.N., Yuan, Y., Min, H.B., Sun, F.C.: Multi-objective robust control based on fuzzy singularly perturbed models for hypersonic vehicles. Sci. China Ser. F 54(3), 563–576 (2011)
Xu, H.J., Mirmirani, M.D., Ioannou, P.A.: Robust neural adaptive control of a hypersonic aircraft. In: AIAA Guidance, Navigation, and Control Conference and Exhibit, AIAA Paper 2003-5641, Austin, Texas, USA (2003)
Li, X.D., Xian, B., Diao, C., Yu, Y.P., Yang, K.Y., Zhang, Y.: Output feedback control of hypersonic vehicles based on neural network and high gain observer. Sci. China Ser. F 54(3), 429–447 (2011)
Xu, B., Wang, D.W., Sun, F.C., Shi, Z.K.: Direct neural discrete control of hypersonic flight vehicle. Nonlinear Dyn. 70(1), 269–278 (2012). doi:10.1007/s11071-012-0451-x
Xia, Y.Q., Zhu, Z., Fu, M.Y.: Back-stepping sliding mode control for missile system based on an extended state observer. IET Control Theory Appl. 5(1), 93–102 (2009)
Xia, Y.Q., Zhu, Z., Fu, M.Y., Wang, S.: Attitude tracking of rigid spacecraft with bounded disturbances. IEEE Trans. Ind. Electron. 58(2), 647–659 (2011)
Ding, S.H., Li, S.H.: Stabilization of the attitude of a rigid spacecraft with external disturbances using finite-time control techniques. Aerosp. Sci. Technol. 13(4–5), 256–265 (2009)
Feng, Y., Yu, X.H., Man, Z.H.: Non-singular terminal sliding mode control of rigid manipulators. Automatica 38(12), 2159–2167 (2002)
Wang, Z., Li, S.H., Fei, S.M.: Finite-time tracking control of bank-to-turn missiles using terminal sliding mode. ICIC Express Lett. 3(48), 1373–1380 (2009)
Zhang, Y.X., Sun, M.W., Chen, Z.Q.: Finite-time convergent guidance law with impact angle constraint based on sliding-mode control. Nonlinear Dyn. 70(1), 619–625 (2012). doi:10.1007/s11071-012-0482-3
Wu, Y.Q., Yu, X.H., Man, Z.H.: Terminal sliding mode control design for uncertain dynamic systems. Syst. Control Lett. 34(57), 281–288 (1998)
Zong, Q., Zhao, Z.S., Zhang, J.: Higher order sliding mode control with self-tuning law based on integral sliding mode. IET Control Theory Appl. 4(7), 1282–1289 (2010)
Ohishi, K., Nakao, M., Ohnishi, K., Miyachi, K.: Microprocessor-controlled DC motor for load-insensitive position servo system. IEEE Trans. Ind. Electron. 31(1), 44–49 (1987)
Chen, W.H., Ballance, D.J., Gawthrop, P.J., O’Reilly, J.: A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 47(4), 932–938 (2000)
Yang, J., Li, S.H., Chen, X.S., Li, Q.: Disturbance rejection of ball mill grinding circuits using DOB and MPC. Powder Technol. 198(2), 219–228 (2010)
Guo, L., Tomizuka, M.: High-speed and high-precision motion control with an optimal hybrid feedforward controller. J. Process Control 2(2), 110–112 (1997)
Ishikawa, J., Tomizuka, M.: A novel add-on compensator for cancellation of pivot nonlinearities in hard disk drives. IEEE Trans. Magn. 34(4), 1895–1897 (1998)
Yang, J., Zolotas, A., Chen, W.H., Michail, K., Li, S.H.: Robust control of nonlinear MAGLEV suspension system with mismatched uncertainties via DOBC approach. ISA Trans. 50(3), 389–396 (2011)
Chen, W.H.: Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 9(4), 706–710 (2004)
Liu, Z.L., Svoboda, J.: A new control scheme for nonlinear systems with disturbances. IEEE Trans. Control Syst. Technol. 14(1), 176–181 (2004)
Guo, L., Chen, W.H.: Disturbance attenuation and rejection for a class of nonlinear systems via DOBC approach. Int. J. Robust Nonlinear Control 15(3), 109–125 (2005)
Shtessel, Y.B., Shkolnikov, I.A., Levant, A.: Guidance and control of missile interceptor using second-order sliding modes. IEEE Trans. Aerosp. Electron. Syst. 45(1), 110–123 (2009)
Wilcox, Z.D., MacKunis, W., Bhat, S., Lind, R., Dixon, W.E.: Lyapunov-based exponential tracking control of a hypersonic aircraft with aerothermoelastic effects. J. Guid. Control Dyn. 33(4), 1213–1223 (2010)
Wang, Q., Stengel, R.F.: Robust nonlinear control of a hypersonic aircraft. J. Guid. Control Dyn. 23(4), 577–585 (2000)
Xu, B., Sun, F.C., Yang, C.G., Gao, D.X., Ren, J.X.: Adaptive discrete-time controller design with neural network for hypersonic flight vehicle via back-stepping. Int. J. Control 84(9), 1543–1552 (2011)
Bhat, S.P., Bernstein, D.S.: Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38(3), 751–766 (2000)
Bhat, S.P., Bernstein, D.S.: Geometric homogeneity with applications to finite-time stability. Math. Control Signals Syst. 17(2), 101–127 (2005)
Hardy, H., Littlewood, J.E., Polya, G.: Inequalities. Cambridge University Press, Cambridge (1952)
Acknowledgements
This work is supported by National Natural Science Foundation of China (61074013, 91016004, 61125306, 61203011), Program for New Century Excellent Talents in University (NCET-10-0328), and the Natural Science Foundation of Jiangsu Province (BK2012327).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The expressions of ϖ 1, ϖ 2, φ 1, φ 2 are listed as follows.

Rights and permissions
About this article
Cite this article
Sun, H., Li, S. & Sun, C. Finite time integral sliding mode control of hypersonic vehicles. Nonlinear Dyn 73, 229–244 (2013). https://doi.org/10.1007/s11071-013-0780-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-0780-4