
Abstract
This paper is concerned with the stabilization problem of uncertain chaotic systems with input nonlinearity. The slope parameters of this nonlinearity are unmeasured. A new sliding function is designed, then an adaptive sliding mode controller is established such that the trajectory of the system converges to the sliding surface in a finite time and finite-time reachability is theoretically proved. Using a virtual state feedback control technique, sufficient condition for the asymptotic stability of sliding mode dynamics is derived via linear matrix inequality (LMI). Then the results can be extended to uncertain chaotic systems with disturbances and adaptive sliding mode H ∞ controllers are designed. Finally, a simulation example is presented to show the validity and advantage of the proposed method.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Chaos has been paid much attention by many researchers in the last three decades. In most of the studies, control of chaotic systems is one of hot points. The main aim of chaos control is to suppress chaotic behavior and to stabilize the chaotic system. Various effective techniques and approaches have already been successfully presented to achieve chaos control [1, 2].
As one of the common methods, sliding mode control is a very effective approach to control chaos because of its attractive features such as fast response, good transient response, and insensitivity to variations in system parameters and external disturbances [3–8]. On the other hand, in some engineering practices, due to physical limitation, there do exist nonlinearities in the control input, input nonlinearities, such as saturation, quantization, backlash, dead-zones, and so on, naturally originate from actuators in system realization and their effects cannot be ignored in analysis of realization. There are many results about input nonlinearity, see [9–20] and references therein. However, in general, it is difficult to obtain the information of the slope parameters (i.e. gain reduction tolerances) of input nonlinearity in practical applications. An adaptive control approach may solve this issue and some relevant results have been presented [17–20], but the research is not sufficient for the problem of adaptive sliding mode control of uncertain chaotic systems with input nonlinearity containing unknown slope parameters.
Motivated by the above reasons, by incorporating an adaptive control into sliding mode control, the stabilization problem of uncertain chaotic systems with input nonlinearity is considered. Because there always exist disturbances or noises in real chaotic systems that may cause instability and poor performance [21–26], then the results can be extended to uncertain chaotic systems with disturbances and adaptive sliding mode H ∞ controllers are designed. The main contributions of this paper lie in the following aspects: (1) A new sliding function is designed to extend the results in [27, 28]. Compared with these results, this new design makes the reaching interval eliminated and the chattering is reduced. (2) An adaptive sliding mode control algorithm is proposed by estimating the unknown slope parameters of input nonlinearity and finite-time reachability is theoretically proved. (3) By using a virtual state feedback control technique, a sufficient condition for the asymptotic stability of the sliding mode dynamics is derived via linear matrix inequality (LMI).
Notations
The following notations will be used throughout this paper. R n and R n×m denote, respectively, the n-dimensional Euclidean space and the space of n×m real matrices. Let ∥⋅∥ denote the Euclidean norm of a vector and its induced norm of a matrix. Unless explicitly stated, matrices are assumed to have real entries and compatible dimensions. L 2[0,∞) is the space of square-integrable vector functions over [0,∞). ∗ represents the symmetric form of a matrix.
2 Problem formulation
Consider the following chaotic system:
where x(t)∈R n is the state vector, u(t)=[u 1,u 2,…,u m ]T∈R m is the control input. ϕ(u)=[ϕ 1(u 1),ϕ 2(u 2),…,ϕ m (u m )]T, where ϕ i (⋅) is a continuous function for i=1,2,…,m. f(x) is a nonlinear real-valued function vector. Δf(x) represents the uncertainty. A∈R n×n and B∈R n×m are matrices, (A,B) is controllable. B is of full column rank.
The following assumptions are necessary for further study.
Assumption 1
The uncertainty Δf(x) satisfies
where ρ is a known positive constant.
Assumption 2
The nonlinear function ϕ(u) satisfies ϕ(0)=0 and
where the slope parameters α and β are unknown but bounded positive constants and also called the gain reduction tolerances. Moreover, \(\alpha\leq\bar{\alpha}\), \(\bar{\alpha}\) is a known positive constant.
Remark 1
Assumption 2 is not a restrictive condition, since a priori knowledge of the upper bounds of the slopes seems to be a natural assumption in engineering practice [19, 20].
The aim is to design an adaptive sliding mode controller to make the state trajectory of the closed-loop system converge to zero asymptotically, even if the information of the slope parameters of input nonlinearity is unknown.
3 Main results
For system (1), firstly, a sliding function is designed. Then an adaptive sliding mode controller is designed to drive the state onto the sliding surface in a finite time. Secondly, a sufficient condition is given, which guarantees the system (1) on the sliding surface s(t)=0 is asymptotically stable.
3.1 Adaptive sliding mode controller design
For system (1), a new sliding function is designed as
where P>0 is a matrix to be chosen later and the parameter λ>0.
Usually, the system (1) on the sliding surface s(t)=0 is called the sliding mode dynamics of the system (1).
Remark 2
The design of sliding function is different from that of the published papers [7, 8], although these sliding functions satisfy s(0)=0. The proposed design does not also include the integral term, which not only adds the dimension of the system, but also results in adding the difficulty of systems analysis and design, such as [7–9, 11, 16].
Remark 3
The sliding function (2) extends the design of sliding function s(t)=B T Px(t), which is widely used in many papers, such as [27, 28]. Compared with these results, the sliding function (2) makes the state of system arrive at the sliding surface at the very beginning, then the reaching interval is eliminated.
To achieve the control objective, the input u(t) is designed as follows:
with the adaptive law
where \(\psi(x)= \hat{\alpha}(t)\varOmega\), Ω=∥(B T PB)−1 B T PAx(t)+f(x)∥+ρ∥x(t)∥+λe −λt∥(B T PB)−1 B T Px(0)∥+η, η>0, κ>0.
Theorem 1
If the adaptive controller u(t) is taken as (3) and (4), then the trajectory of the system (1) converges to the sliding surface s(t)=0 in a finite time T. Furthermore, \(T\leq \frac{\hat{\alpha}^{-2}(0)+\bar{\alpha}^{2}}{2\eta}\).
Proof
Consider a Lyapunov function candidate as follows:
where \(\tilde{{\alpha}}(t)=\hat{\alpha}^{-1}(t)-\alpha\).
Calculating the time derivative of V(t) along the trajectory of system (1), if ∥s(t)∥≠0, then we have
Using (3) and Assumption 2, we have
Since ψ(x)>0, we get
Substituting (4) and (8) into (6) yields
Noting that \(\alpha \hat{\alpha}(t)+\tilde{\alpha}(t)\hat{\alpha}(t)=1\), we have
Therefore, we obtain
Integrating the above from 0 to T and let V(T)=0, we obtain
Since s(0)=0, then \(V(0)= \frac{1}{2}(\hat{\alpha}^{-1}(0)-\alpha)^{2}\leq \frac{1}{2}(\hat{\alpha}^{-2}(0)+\bar{\alpha}^{2})\), so the reachability in a finite time can be guaranteed.
Thus, the proof is completed. □
Remark 4
From \(\tilde{{\alpha}}(t)=\hat{\alpha}^{-1}(t)-\alpha\), \(\hat{\alpha}(t)\) does not necessarily converge to the nominal value α, but the main aim is to make the state reach the sliding surface in a finite time, this problem does not affect the results of this paper.
It is seen that the parameter ρ is required to synthesize the sliding mode controller (3). When it is an unknown positive constant, we have the following theorem.
Theorem 2
If the adaptive controller u(t) is taken as
with the adaptive laws
then the trajectory of the system (1) will tend to the sliding surface s(t)=0 and remain there, where \(\psi(x)=\hat{\alpha}(t)\varOmega\), \(\varOmega=\lVert (B^{T}PB)^{-1}B^{T}PAx(t)+ f(x) \rVert +\lambda e^{-\lambda t}\lVert (B^{T}PB)^{-1} B^{T}Px(0) \rVert + \hat{\rho}(t)\lVert x(t) \rVert +\eta\), η>0, κ 1>0, κ 2>0.
Proof
Consider a Lyapunov function candidate as follows:
where \(\tilde{{\alpha}}(t)=\hat{\alpha}^{-1}(t)-\alpha\) and \(\tilde{\rho}(t)=\hat{\rho}(t)-\rho\).
Calculating the time derivative of V(t) along the trajectory of system (1), if ∥s(t)∥≠0, then we have
Similar to the proof in Theorem 1, we have
Substituting (14) and (18) into (17) yields
Noting that \(\alpha \hat{\alpha}(t)+\tilde{\alpha}(t)\hat{\alpha}(t)=1\) and (15), we have
Then the trajectory of the system (1) will tend to the sliding surface s(t)=0 and remain there.
The proof is completed. □
3.2 Stability of the sliding mode dynamics
The following theorem provides a sufficient condition for the sliding mode dynamics to be stabilized.
Theorem 3
Consider the system (1) and a given constant σ>0. If there exist matrices X>0 and Y such that the following linear matrix inequality (LMI) is true:
then the sliding mode dynamics of the system (1) is asymptotically stable. Furthermore, P=X −1 and K=YX −1.
Proof
Consider the following Lyapunov functional candidate:
The time derivative of V(t) along the trajectories of system (1) is given by
where K is an arbitrary matrix.
On the sliding surface s(t)=0, from (2), we have
Pre- and post-multiplying the matrix (21) by P, and using P=X −1 and Y=KX, we get
Since x(t) is bounded, then u(t) is bounded from (3) or (13). Furthermore, ϕ(u(t)) is bounded. So the term 2x T(0)PB[ϕ(u(t))−Kx+f(x)+Δf(x)] is bounded. Assume that ∥2x T(0)PB[ϕ(u(t))−Kx+f(x)+Δf(x)]∥≤δ, where δ is a positive constant.
Substituting (24) and (25) into (23), we have
Solving (26), we obtain
As we know,
We easily get
From the above, we get
The proof is completed. □
Remark 5
In (23), the term Kx is called virtual state feedback control, which is used to reduce the conservatism of sliding surface design.
4 Extending to sliding mode H ∞ control
In fact, there always exist disturbances or noises in real chaotic systems that may cause instability and poor performance. In this section, we focus on sliding mode H ∞ control problem to study the uncertain chaotic systems with disturbances.
Consider the system (1) with disturbances as follows:
where D, C and E are matrices with compatible dimensions, w(t) is a bounded disturbance, z(t)∈R m is the output.
The sliding function is also chosen as (2). The following definition is necessary to our further discussion.
Definition 1
The sliding mode dynamics of system (30) is said to be asymptotically stable with disturbance attenuation level γ, if the following conditions are satisfied:
-
(a)
The sliding mode dynamics of system (30) is asymptotically stable when w(t)=0.
-
(b)
Under the zero-initial conditions, the controlled output z(t) satisfies
$$\int_0^{\infty}z^T(s)z(s)ds<\gamma^2 \int_0^{\infty}w^T(s)w(s)ds$$for all nonzero w(t)∈L 2[0,∞), where γ>0 is a prescribed level of disturbance attenuation.
Similar to the above sections, we give Theorems 4, 5, and 6. Theorems 4 and 5 show the adaptive sliding mode controller designs of the system (30), for the both cases with the known parameter ρ and the unknown one, respectively. The proofs can be easily obtained similar to the arguments in Theorems 1 and 2, the details are omitted. In Theorem 6, a sufficient condition is given, which guarantees the sliding mode dynamics of the system (30) (that is, the system (30) on the sliding surface s(t)=0) is asymptotically stable with disturbance attenuation level γ.
Theorem 4
If the adaptive controller u(t) is taken as
with the adaptive law
then the trajectory of the system (30) converges to the sliding surface s(t)=0 in a finite time T, \(T\leq \frac{\hat{\alpha}^{-2}(0)+\bar{\alpha}^{2}}{2\eta}\). In (31) and (32), \(\psi(x)= \quad\hat{\alpha}(t)\varOmega\), \(\varOmega= \lVert (B^{T}PB)^{-1}B^{T}PAx(t)+f(x) \rVert + {\rho}\lVert x(t) \rVert + \lVert (B^{T}PB)^{-1} B^{T}PD \rVert \cdot \lVert w(t) \rVert +\lambda e^{-\lambda t}\lVert (B^{T}PB)^{-1} B^{T}Px(0) \rVert +\eta\), η>0, κ>0.
Theorem 5
If the adaptive controller u(t) is taken as
with the adaptive laws
then the trajectory of the system (30) will tend to the sliding surface s(t)=0 and remain there, where \(\psi=\hat{\alpha}(t)\varOmega\), \(\varOmega=\lVert (B^{T}PB)^{-1}B^{T}PAx(t)+f(x) \rVert +\lambda e^{-\lambda t}\lVert (B^{T}PB)^{-1} B^{T}Px(0) \rVert + \lVert (B^{T}PB)^{-1} B^{T}PD \rVert \cdot \lVert w(t) \rVert +\hat{\rho}(t)\lVert x(t) \rVert +\eta\), η>0, κ 1>0, κ 2>0.
Theorem 6
For two given positive constants σ and γ, the sliding mode dynamics of the system (30) is asymptotically stable with disturbance attenuation level γ, if there exist matrices X>0 and Y such that the following linear matrix inequality (LMI) is true:
where Ω=AX+XA T+BY+Y T B T+σX. Furthermore, P=X −1 and K=YX −1.
Proof
From (36), we easily obtain
Then, by Theorem 3, the sliding mode dynamics of the system (30) is asymptotically stable when w(t)=0.
Next, we shall show that (36) holds for all nonzero w(t)∈L 2[0,∞).
Consider the following Lyapunov functional candidate:
The time derivative of V(t) along the trajectories of system (30) is given by
where K is an arbitrary matrix.
On the sliding surface s(t)=0, from (2), we have
Under the zero-initial conditions, we have
From (39), we have
where Δ=P(A+BK)+(A+BK)T P+C T C.
Pre- and post-multiplying the matrix (36) by diag{P,I,I}, and using P=X −1 and Y=KX, by Schur’s complement Lemma, we get
Integrating (44) from 0 to ∞ and noting that x(0)=0, we obtain
We easily get
The proof is completed. □
5 Example
In this section, Genesio’s chaotic system is given to show the effectiveness of the method. Without loss of generality, we only consider the simulation of uncertain Genesio’s system without disturbances, because the simulation process of Genesio’s system with bounded disturbances is similar to that, so the process is omitted.
Genesio’s system with nonlinear input is as follows:
where  ,
,  , \(f(x)=x_{1}^{2}(t)\), Δf(x)=0.1sin(x
2(t)), ϕ(u)=(0.6+0.3sin(u))u.
, \(f(x)=x_{1}^{2}(t)\), Δf(x)=0.1sin(x
2(t)), ϕ(u)=(0.6+0.3sin(u))u.
Let σ=0.5, solving LMI (21) yields
Then we have
The initial value is x(0)=[−1 0 1]T. Then sliding function is designed as
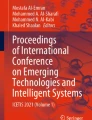
From Assumption 1, we have ρ=0.1. Using the controllers (3) and (4) in Theorem 1 and the parameters κ=0.01 and η=0.0001, the simulation results are as shown in Figs. 1–5.

State x(t) of the closed-loop system (47)

The control input u(t)
Figures 1–4 show the time responses of the state, control input, sliding function and adaptive law, respectively. It is concluded that the proposed method is effective. To present the advantages of the method proposed in this paper, we would like to give a comparison. Figures 3 and 5 give the sliding function s(t) for these designs. It is obvious that the design of sliding function in this paper eliminates the reaching interval, the chattering is reduced.

The sliding function s(t)

Adaptive law \(\hat{\alpha}(t)\)

6 Conclusion and discussion
In this paper, the stabilization problem of uncertain chaotic systems with input nonlinearity is investigated. A new sliding function is proposed, which not only makes the reaching interval eliminated, but also reduces the difficulty of systems analysis and design. An adaptive sliding mode controller is designed to make the state of system reach the sliding surface in a finite time and finite-time reachability is theoretically proved. Then the results can be extended to uncertain chaotic systems with disturbances and adaptive sliding mode H ∞ controllers are designed. Finally, the simulation shows the effectiveness of the proposed method.
It is worth noting that there are some interesting yet challenging issues worth further research, like the synchronization problem of the uncertain chaotic systems, such as [21–26]. If the error system model satisfies the model (30), then the H ∞ synchronization problem may be solved by using the proposed method.
References
Ott, E., Grebogi, C., Yorke, J.A.: Controlling chaos. Phys. Rev. Lett. 64, 1196–1199 (1990)
Chen, M., Zhou, D., Shang, Y.: A simple time-delayed method to control chaotic systems. Chaos Solitons Fractals 22, 1117–1125 (2004)
Xia, Y., Zhu, Z., Fu, M., Wang, S.: Attitude tracking of rigid spacecraft with bounded disturbances. IEEE Trans. Ind. Electron. 58, 647–659 (2011)
Xia, Y., Lu, K., Zhu, Z., Fu, M.: Adaptive backstepping sliding mode attitude control of missile systems. Int. J. Robust Nonlinear Control (2013). doi:10.1002/rnc.2952
Xia, Y., Fu, M., Shi, P., Wu, Z.: Adaptive backstepping controller design for stochastic jump systems. IEEE Trans. Autom. Control 54, 2853–2859 (2009)
Xia, Y., Chen, J., Liu, G., Wang, L., Rees, D.: Robust adaptive sliding mode control for uncertain time-delay system. Int. J. Adapt. Control Signal Process. 23, 863–881 (2009)
Cao, W.J., Xu, J.X.: Nonlinear integral-type sliding surface for both matched and unmatched uncertain systems. IEEE Trans. Autom. Control 49, 1355–1360 (2004)
Castanos, F., Fridman, L.: Analysis and design of integral sliding manifolds for systems with unmatched perturbations. IEEE Trans. Autom. Control 51, 853–858 (2006)
Chiang, T.Y., Huang, M.L., Yan, J.J., Yang, Y.S., Chang, J.F.: Sliding mode control for uncertain unified chaotic systems with input nonlinearity. Chaos Solitons Fractals 34, 437–442 (2007)
Li, J., Li, W., Li, Q.: Sliding mode control for uncertain chaotic systems with input nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 17, 341–348 (2012)
Yau, H.T., Yan, J.J.: Chaos synchronization of different chaotic systems subjected to input nonlinearity. Appl. Math. Comput. 197, 775–788 (2008)
Wang, H., Zhang, X., Wang, X., Zhu, X.: Finite time chaos control for a class of chaotic systems with input nonlinearities via TSM scheme. Nonlinear Dyn. 69, 1941–1947 (2012)
Adloo, H., Noroozi, N., Karimaghaee, P.: Observer-based model reference adaptive control for unknown time-delay chaotic systems with input nonlinearity. Nonlinear Dyn. 67, 1337–1356 (2012)
Kebriaei, H., Yazdanpanah, M.J.: Robust adaptive synchronization of different uncertain chaotic systems subject to input nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 15, 430–441 (2010)
Pourdehi, S., Karimipour, D., Karimaghaee, P.: Output-feedback lag-synchronization of time-delayed chaotic systems in the presence of external disturbances subjected to input nonlinearity. Chaos 21, 043128 (2011)
Niu, Y., Wang, X.: Projective synchronization of different chaotic systems with nonlinearity inputs. Int. J. Mod. Phys. B 26, 1250059 (2012)
Noroozi, N., Roopaei, M., Karimaghaee, P., Safavi, A.A.: Simple adaptive variable structure control for unknown chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 15, 707–727 (2010)
Hu, Q., Ma, G., Xie, L.: Robust and adaptive variable structure output feedback control of uncertain systems with input nonlinearity. Automatica 44, 552–559 (2008)
Ibrir, S., Xie, W., Su, C.: Adaptive tracking of nonlinear systems with non-symmetric dead-zone input. Automatica 43, 522–530 (2007)
Ma, H.J., Yang, G.H.: Adaptive output control of uncertain nonlinear systems with non-symmetric dead-zone input. Automatica 46, 413–420 (2010)
Ahn, C.K., Jung, S.T., Kang, S.K., Joo, S.C.: Adaptive H ∞ synchronization for uncertain chaotic systems with external disturbance. Commun. Nonlinear Sci. Numer. Simul. 15, 2168–2177 (2010)
Ahn, C.K.: T-S fuzzy H ∞ synchronization for chaotic systems via delayed output feedback control. Nonlinear Dyn. 59, 535–543 (2010)
Ahn, C.K.: Fuzzy delayed output feedback synchronization for time-delayed chaotic systems. Nonlinear Anal. Hybrid Syst. 4, 16–24 (2010)
Ahn, C.K.: Output feedback H ∞ synchronization for delayed chaotic neural networks. Nonlinear Dyn. 59, 319–327 (2010)
Ahn, C.K.: Neural network H ∞ chaos synchronization. Nonlinear Dyn. 60, 295–302 (2010)
Ahn, C.K.: An H ∞ approach to anti-synchronization for chaotic systems. Phys. Lett. A 373, 1729–1733 (2009)
Qu, S., Wang, Y.: Robust control of uncertain time delay system: a novel sliding mode control design via LMI. J. Syst. Eng. Electron. 17, 624–628 (2006)
Wu, T.Z., Juang, Y.T.: Design of variable structure control for fuzzy nonlinear systems. Expert Syst. Appl. 35, 1496–1503 (2008)
Acknowledgements
The authors are grateful for the support of the National Natural Science Foundation of China under grants 51277053, 61374077 and 61074011, and Aeronautical Science Foundation of China under grant 20115142005.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, L., Pu, J., Song, X. et al. Adaptive sliding mode control of uncertain chaotic systems with input nonlinearity. Nonlinear Dyn 76, 1857–1865 (2014). https://doi.org/10.1007/s11071-013-1163-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1163-6