
Abstract
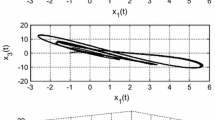
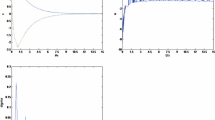
In this paper, we introduce an adaptive sliding mode control (SMC) to deal with a finite-time convergence problem of a multiple inputs and multiple outputs (MIMO) system in the presence of uncertainties and/or external disturbances. The proposed controller is constructed by using the super-twisting sliding mode technique to eliminate a negative effect of the chattering phenomenon on the system. Additionally, an adaptive law is designed to guarantee a rapid adaptation and robust stability of the closed-loop system even without knowledge of the upper bound conditions of uncertainties/perturbations. The stability of a control system is investigated by the Lyapunov theorem. A great efficiency of the proposed algorithm is proven through a numerical simulation of a chaotic system.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Thanh, H.L.N.N., Hong, S.K.: An extended multi-surface sliding control for matched/mismatched uncertain nonlinear systems through a lumped disturbance estimator. IEEE Access 8, 91468–91475 (2020)
Thanh, H.L.N.N., Vu, M.T., Mung, N.X., Phi, N.N., Phuong, N.T.: Perturbation observer-based robust control using a multiple sliding surface for nonlinear systems with influences of matched and unmatched uncertainties. Mathematics 8(8), 1371 (2020)
Thanh, H.L.N.N., Lee, C.H., Nguyen, X.M., Hong, S.K.: An effective dynamic sliding mode control based nonlinear disturbance observer for a quadcopter UAV. In: 2020 IEEE 16th International Conference on Control & Automation (ICCA) (Virtual), Hokkaido, Japan, 9–11 October 2020, pp. 1553–1558 (2020)
Thanh, H.L.N.N., Vu, M.T., Nguyen, N.P., Mung, N.X., Hong, S.K.: Finite-time stability of MIMO nonlinear systems based on robust adaptive sliding control: methodology and application to stabilize chaotic motions. IEEE Access 9, 21759–21768 (2021)
Colorado, R.M.: Finite time sliding mode controller for perturbed second-order systems. ISA Trans. 95, 82–92 (2019)
Mao, J., Li, S., Yang, J.: Design and implementation of continuous finite-time sliding mode control for 2-DOF inertially stabilized platform subject to multiple disturbances. ISA Trans. 84, 214–224 (2019)
Vu, M.T., Thanh, H.L.N.N., Huynh, T.T., Do, Q.T., et al.: Station-keeping control of a hovering over-actuated autonomous underwater vehicle under ocean current effects and model uncertainties in horizontal plane. IEEE Access 9, 6855–6867 (2021)
Yang, J., Li, S., Yu, X.: Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 60(1), 160–169 (2013)
Chen, W.-H.: Disturbance observer-based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 9(4), 706–710 (2004)
Chen, M., Wu, Q.X., Cui, R.X.: Terminal sliding mode control for a class of nonaffine nonlinear systems with uncertainty. ISA Trans. 52, 198–206 (2013)
Man, Z., Yu, X.: Termina sliding mode control of MIMO linear systems. IEEE Trans. Circuit. Syst. I: Fundam. Theory Appl. 44, 1065–1070 (1997)
Mobeyen, S., Majd, V.J., Sojoodi, M.: An LMI-based composite nonlinear feedback terminal sliding-mode controller design for disturbed MIMO systems. Math. Comput. Simulat. 85, 1–10 (2012)
Mobayen, S., Tchier, F.: A novel robust adaptive second-order sliding mode tracking control technique for uncertain dynamical systems with matched and unmatched disturbances. Int. J. Control Autom. Syst. 15(3), 1097–1106 (2017)
Thanh, H.L.N.N., Hong, S.K.: Quadcopter robust adaptive second order sliding mode control based on PID sliding surface. IEEE Access 6, 66850–66860 (2018)
Moreno, J.A., Osorio, M.: A Lyapunov approach to second-order sliding mode controllers and observers. In: Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008
Thanh, H.L.N.N., Hong, S.K.: Robust dynamic sliding mode control – based PID – super twisting algorithm and disturbance observer for second-order nonlinear systems: application to UAVs. Electronics 8(7), 760 (2019)
Shtessel, Y., Taleb, M., Plestan, F.: A novel adaptive-gain super- twisting sliding mode controller: methodology and application. Automatica 48(5), 759–769 (2012)
Yang, S.K., Chen, C.L., Yau, H.T.: Control of chaos in Lorenz system. Chaos Solitons Fractals 13, 767–780 (2012)
Acknowledgement
This research was supported by the MSIT (Ministry of Science and ICT), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2021-2018-0-01424) supervised by the IITP (Institute for Information & communications Technology Promotion).
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Le Nhu Ngoc Thanh, H., Lee, C.H., Hong, S.K. (2022). Finite-Time Adaptive Sliding Control for a Class of Perturbed MIMO Nonlinear Systems. In: Al-Emran, M., Al-Sharafi, M.A., Al-Kabi, M.N., Shaalan, K. (eds) Proceedings of International Conference on Emerging Technologies and Intelligent Systems. ICETIS 2021. Lecture Notes in Networks and Systems, vol 299. Springer, Cham. https://doi.org/10.1007/978-3-030-82616-1_5
Download citation
DOI: https://doi.org/10.1007/978-3-030-82616-1_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-82615-4
Online ISBN: 978-3-030-82616-1
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)