
Abstract
A kind of variable gain nonlinear sliding mode adaptive method is proposed to solve the synchronization problem of chaotic systems with unknown parameters and uncertain functions. The design of nonlinear sliding mode is very skillful. It is not only make sliding surface stable but not make the control easy to be solved. Since with a constant gain, the control system will be not sensitive enough to small signals or it will be unstable to big signals. So the variable gain method is adopted to improve the control accuracy. At last, detailed numerical simulation is done to testify the rightness and effectiveness of the proposed method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
It is very important to choose a proper gain for a real system. If the gain is not proper, the system will not behave well [1–10]. For example, if the gain is too big, the system will be unstable for the situation of big errors or big input signals. So the stable field will decrease from the state space points of views. But if the gain is too small, the steady state error will be too big and the control accuracy is not enough. So to choose a proper gain not only the dynamic performance but also the robustness should be considered simultaneously.
In this paper, a kind of variable gain method is proposed to solve the above problem and it is integrated with a kind of nonlinear sliding mode synchronization method. The nonlinear integral sliding mode method can make the synchronization error to be small and make the system stable. But it is not easy to choose the proper gain for the nonlinear sliding mode method. So a kind a variable gain is introduced and the advantage is that it can adapt to the input signals automatically. Simulation result shows the effectiveness of the proposed method.
2 Problem Description
Take an universal chaos system for an example, the driven system can be described as follow
The response system can be written as
The control objective for variable gain nonlinear sliding mode synchronization method is to design a synchronization law \( u_{i} = u_{i} (k_{i} ,S_{i} ,\hat{d}_{ij} ), \) \( k_{i} = f_{ki} (S_{i} ,z_{i} ) \) and \( \dot{\hat{d}}_{ij} = H(S_{i} ,z_{i} ) \) such that the synchronization can be fulfilled then it has \( f_{ki} (S_{i} ,z_{i} ), \) where \( f_{ki} (S_{i} ,z_{i} ) \) is a variable nonlinear function and \( H(S_{i} ,z_{i} ) \) is the turning law.
3 Assumptions
To make the below context more easy to understand, it is necessary to make two assumptions for the chaotic system.
Assumption 1: the response system has the some dimension as the driven system.
Assumption 2: there exists a positive constant \( d_{ij} \) such that the nonlinearities of the driven system satisfies
where \( S_{i} \) is sliding mode and it is defined as follows.
Since the driven system is a chaotic system, and chaotic systems are bounded, so it is easy to be satisfied by many common chaotic systems.
4 Adaptive Nonlinear Sliding Mode with Variable Gain
Define a new error variable as \( z_{i} = y_{i} - x_{i} , \) for the above driven response system, the error system can written as
Design the nonlinear sliding mode surface as
where \( w_{ij} > 0. \)
Solve the derivative of the above sliding mode surface it holds:
Design the control as
Where
And design \( u_{id} \) as:
It holds:
It can be simplified as:
where
Then it holds:
Design the turning law as
Choose the Lyapunov function as
It is easy to prove that
So the system is stable. Based on the above method, a kind of variable gain method is designed to improve the dynamic performance and reduce the system gain. Design
To make it easy to understand, take a example as \( \varepsilon_{i1} = 0.2, \) \( \varepsilon_{i2} = 0.005. \) If \( \left| {z_{i} } \right| \ge 0.2, \) it holds
If \( \left| {z_{i} } \right| \to 0, \) it holds
It is obvious that the gain of the whole system will be very big when the input signal is small but the gain will decrease very quick if the input signal is very big.
5 Numerical Simulation
Take a three dimension chaotic system as an example, the driven system can be written as
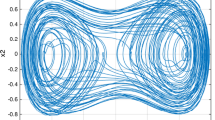
where choose \( a = 20,b = 14,c = 10.6,h = 2.8,k_{lb} = 0 \) and the system has an attractor. \( a,b,c,h \) are unknown constants, \( k_{lb} \) items are unknown functions. The structure of response system is known, which can be expanded as:
Choose parameters as \( (a_{y} ,b_{y} ,c_{y} ,k_{y} ,h_{y} ) = (10,40,2.5,1,4), \) and the initial state of response system can be set as \( (y_{1} ,y_{2} ,y_{3} ) = (1, - 1,2). \) The simulation result can be seen in below figures.
Figure 95.1 shows the synchronization of response system state y1 and driven system state x1.

States x1 and y1
Figure 95.2 shows the synchronization of response system state y2 and driven system state x2.

States x2 and y2
Figure 95.3 shows the synchronization of response system state y3 and driven system state x3.

States x3 and y3
With the proposed variable gain integral sliding mode synchronization method, it is obvious that the synchronization can be fulfilled but the synchronization error cannot be converged to zero that is mainly because of the disturbance of unknown nonlinear functions. With high gain controller design, the synchronization error can be decreased but it cannot be totally cancelled.
6 Conclusions
A kind of nonlinear integral sliding mode synchronization strategy is proposed with variable gain, which cannot only make the system to be sensitive to small signals but also can make the system to be stable with big input signals. Simulation results shows that the proposed method is effective and synchronization can be fulfilled but the synchronization error cannot be converged to zero because of the existence of unknown nonlinear functions.
References
Roy R et al (1994) Experimental synchronization in laser chaos. Phys Rev Lett 72(22):3502–3505
Sugawara T, Tachikawa M (1994) Observation of synchronization in laser chaos. Phys Rev Lett 72(22):3502–3506
Jing Gao Ping et al (2003) A simple global synchronization criterion for coupled chaotic systems. Chaos Solit Fract 3(15):925–935
Yan Jianping, Li Changpin (2005) On synchronization of three chaotic systems. Chaos Solit Fract 32(23):1683–1688
Sarasola, Torrealdea FJ, Anjou AD (2003) Feedback synchronization of chaotic systems. Int J Bifurcation Chaos 13(1):177–191
Yassen MT (2005) Chaos synchronization between two different chaotic systems using active control. Chaos Solit Fract 23(4):131–140
Agiza HN, Yassen MT (2001) Synchronization of Rossler and Chen chaotic dynamical systems using active control. Phys Lett A 77(278):191–197
Ho Ming-chung, Hung Yao-Chen (2002) Synchronization of two different systems by using generalized active control. Phys Lett A 4(301):424–428
Jiang GP, Tang KS (2002) A global synchronization criterion for coupled chaotic systems via unidirectional linear error feedback approach. Int J Bifurcation Chaos 12(10):2239–2253
Bu SL, Wang SQ (2002) An algorithm based on variable feedback to synchronize chaotic and hyperchaotic systems. Physica D 164:45–52
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag London
About this paper
Cite this paper
Zhou, A., Ren, G., Shao , C., Liang, Y. (2013). Synchronization of Uncertain Chaotic System by Nonlinear Sliding Mode Method. In: Du, W. (eds) Informatics and Management Science III. Lecture Notes in Electrical Engineering, vol 206. Springer, London. https://doi.org/10.1007/978-1-4471-4790-9_95
Download citation
DOI: https://doi.org/10.1007/978-1-4471-4790-9_95
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-4789-3
Online ISBN: 978-1-4471-4790-9
eBook Packages: EngineeringEngineering (R0)