
Abstract
In this paper, we discuss a numerical method for solving an inverse Rosenau equation with Dirichlet’s boundary conditions. The approach used is based on collocation of a quintic B-spline over finite elements so that we have continuity of dependent variable and it first four derivatives throughout the solution range. We apply quintic B-spline for spatial variable and derivatives which produce an ill-posed system. We solve this system using Tikhonov regularization method. The accuracy of the proposed method is demonstrated by applying it on a test problem. Figures and comparisons have been presented for clarity. The main advantage of the resulting scheme is that the algorithm is very simple, so it is very easy to implement.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
There has been an overwhelming amount of solutions to the nonlinear evolution equations (NLEEs) obtained in the past few decades using several and newly developed techniques of integration [1,2,3,4]. Some of these nonlinear wave solutions are the cnoidal waves, solitons, solitary waves, shock waves, compactons, stumpons, covatons, cuspons, peakons propeller solitons and several many others; see [5,6,7,8,9,10,11] and references therein. These solutions are all indeed very useful in various areas of applied mathematics and theoretical physics to study the evolution and behavior of the associated solutions (where the exact solution is unlikely to find). In fact, these show up sporadically in plasma physics, nonlinear optics, nuclear physics, fluid dynamics, telecommunications engineering, mathematical biology, mathematical chemistry, mathematical physics just to name a few (see for example [1,2,3,4,5,6,7,8,9,10,11] and references therein).
The Korteweg–de Vries (K-dV) equation is one of the most important problems in nonlinear evolution equations, which models the plane waves with unidirectional propagation in several nonlinear dispersive media. Since the K-dV equation is modelled to describe a unidirectional propagation of waves, it does not treat well wave–wave, wave–wall interactions. Furthermore, because it is derived under the assumption of weakly anharmonic discrete lattice, it may not predict the behavior of high-amplitude waves. To overcome these shortcomings, Rosenau [12, 13] has developed a model called the Rosenau equation, to describe the dynamics of dense discrete systems which leads to a continuum. The equation is expressed as
with boundary conditions
and an initial condition
here \(\bar{\Omega }=[0,1]\) and T is a positive real number. The theoretical results on existence, uniqueness and regularity of solutions to this equation have been investigated by Park [14] for more general functions \(f \in C^{2}(\mathbb {R})\). A lot of work has been done on the numerical method for the Rosenau equation [15,16,17].
Driven by the needs from applications both in industry and other sciences, the field of inverse problems has undergone a tremendous growth within the last two decades, where recent emphasis has been laid more than before on nonlinear problems. This is documented by the wide current literature on regularization methods for the solution of nonlinear ill-posed problems. Advances in this theory and the development of sophisticated numerical techniques for treating the direct problems allow to address and solve industrial inverse problems on a level of high complexity. Generally these problems belong to the class of problems called the ill-posed problems, i.e., small errors in the measured data can lead to large derivations in the estimated quantities. As a consequence, their solution does not satisfy the general requirement of existence, uniqueness, and stability under small changes to the input data. To overcome such difficulties, a variety of techniques for solving inverse problems have been proposed [18]-[24] and among the most versatile methods the following can be mentioned: Tikhonov regularization [25], iterative regularization [26], mollification [27], base function method (BFM) [28], semi finite difference method (SFDM) [29] and the function specification method (FSM) [30].
Zhou et al. [31] investigated the inverse heat conduction problem in a one-dimensional composite slab with rate-dependent pyrolysis chemical reaction and outgassing flow effects using the iterative regularization approach. They considered the thermal properties of the temperature-dependent composites.
Huang et al. [32] applied an iterative regularization method based inverse algorithm in this study in simultaneously determining the unknown temperature and concentration-dependent heat and mass production rates for a chemically reacting fluid using interior measurements of temperature and concentration.
The theory of spline functions is very active field of approximation theory, boundary value problems and partial differential equations, when numerical aspects are considered. In a series of papers by Caglar et al. [33, 34] boundary value problems are solved using B-splines. In addition, Caglar et al. [35] have used third-degree B-spline functions for the solution of heat equation and Mittal and Jain [36] have used quintic B-spline functions for the solution of Rosenau equation.
In this paper, we consider the mathematical model of nonlinear inverse higher order evolution equation
where \(f(u)_{x}\) is some nonlinear expression in terms of \(u,~u_x\) with boundary conditions
and initial condition
here \(\Omega =(0,1), \quad \bar{\Omega }=[0,1]\), \(\mu>0\) and the overspecified conditions
where \(0<\alpha <1\) is a fixed point, \(g_{1}(x),~ g_{2}(x)\) are continuous known functions, \(p_{1}(t),~p_{2}(t)\) and \(u_{0}(x)\) are known functions and T represents the final time, while the functions \(f_{1}(t),~ f_{2}(t)\) are unknown which remains to be determined from some interior measurements.
This paper is arranged as follows. In Sect. 2, description of the quintic B-splines collocation method is explained. In Sect. 3, procedure for implementation of present method for Eqs. (1.1–1.5) is described. In Sect. 4, procedure to obtain an initial vector which is required to start our method is explained. To regularize the resultant ill-posed linear system of equations, in Sect. 5, we apply the Tikhonov regularization (of second order) method to obtain the stable numerical approximation of our solution and the uniform convergence of the method is provided in Sect. 6. Finally in Sect. 7 numerical experiment is conducted to demonstrate the viability and the efficiency of the proposed method computationally.
2 Description of method
In quintic B-splines collocation method, the approximate solution can be written as a linear combination of basic functions which constitute a basis for the approximation space under consideration.
Let be a uniform partition of interval [0, 1] as follows \(0=x_0<x_1<\ldots<x_{N-1}<x_N=1\) where \(h=x_{j+1}-x_{j},~ j=0,\ldots ,N-1\). Our numerical treatment for Rosenau equation using the collocation method with quintic B-spline is to find an approximate solution \(U_{N}(x,t)\) to the exact solution u(x, t) in the form
where \(c_j, \quad j=-2, \ldots ,N+2\) are unknown time-dependent quantities to be determined from boundary conditions \(g_{1}(t),~ g_{2}(t)\) and the initial condition \(u_{0}(x)\) and overspecified conditions \(p_{1}(t),~ p_{2}(t)\).
The set of quintic B-spline \(\{B_{-2},B_{-1}, \ldots ,B_{N+2}\}\) form a basis over the problem domain [0, 1] [37]. Let \({B_j},j=-2, \ldots ,N+2\),
be quintic B-splines, which vanish outside interval. Each quintic B-spline covers six elements so that an element is covered by six quintic B-splines.
Using approximate function (2.1) and quintic spline (2.2), the approximate values at the knots of U(x) and its derivatives up to fourth order are determined in terms of the time parameters \(c_j\) as
where \(U_j=U(x_j,t)\).
The values of \(B_j(x)\) and its derivatives may be tabulated as in Table 1.
Using (2.1) and the boundary conditions (1.3), we get the approximate solution at the boundary point as
and using overspecified conditions (1.5) where \(\alpha =x_s,\;1\le s \le N-1\) and (2.1) we have
3 Implementation of method
Our numerical treatment for solving Eqs. (1.1–1.5) using the collocation method with quintic B-splines is to find an approximate solution \(U_{N}(x,t)\) and \(U_{N}(0,t)\), \(U_{N_{x}}(0,t)\) to the exact solution u(x, t) and \(f_{1}(t)\), \(f_{2}(t)\) is given in (2.1), where \(c_j(t)\) are time-dependent quantities to be determined from the boundary and overspecific conditions and collocation from the differential equation.
From Eq. (1.1), we get
using (2.3), (2.4) in (3.2) then is obtained as follows
The time derivative is discretized in a forward finite difference fashion
where \(k=t^{(n+1)}-t^{(n)}\). In addition, we consider \(U=U^{(n)}\), then (3.3) become as
Introducing (2.3–2.7) into (3.4) yields
where
where k is time step and the superscripts n and n+1 denote the adjacent time levels.
Therefore, we have a system as follows
where
Thus
that \(\lambda =1\), \( \varepsilon =26\), \(\zeta =66\), \(\nu =\frac{5}{h}\), \(\eta =\frac{50}{h}\),
where
here A is \((N+5)\times (N+5)\) matrix, C and \(\rho \) are \((N+5)\) order vectors, which depend on the overspecified and boundary conditions (1.5), (1.3). Now we solve (3.6) for vector C and finally
For start we need an initial vector \(C^0\) which can be obtained to follow the procedure of section.
4 The initial vector \(C^0\)
The initial vector \(C^0\) can be obtained from the initial condition (1.4) and boundary and overspecified conditions (1.3, 1.5) as the following expression
This yield a \((N+5)\times (N+5)\) system of equations, of the form
where
Thus
that \(\lambda =1\), \( \varepsilon =26\), \(\zeta =66\), \(\nu =\frac{5}{h}\), \(\eta =-\frac{50}{h}\),
the solution of (4.1) can be found by Tikhonov regularization method.
5 Tikhonov regularization method
The singular matrix \(\Delta \) is ill-posed and the estimate of \(C^0\) by (4.1) will be unstable so that the Tikhonov regularization method must be used to control this singularity. The Tikhonov regularized solution ([38, 39] and [40]) to the system of linear algebraic equations (3.6) and (4.1) is given by
On the case of \(M=N+5\) the second-order Tikhonov regularization method, the matrix \(R^{(2)}\) is given by, see e.g. [41]
Therefore, we obtain the Tikhonov regularized solution of the regularized equation as
in our computation, we use gcv scheme to determine a suitable value of \(\omega \) [42, 43].
6 Convergence analysis
Let u(x) be the exact solution of the Eq. (1.1) with the boundary conditions (1.3) and initial condition (1.4) and overspecific conditions (1.5) and also \(U(x)=\sum _{j=-2}^{N+2}c_j(t)B_j(x)\) be the B-splines collocation approximation to u(x). Due to round off errors in computations we assume that \(\hat{U}(x)\) be the computed spline for U(x) so that \(\hat{U}(x)=\sum _{j=-2}^{N+2}\hat{c}_j(t)B_j(x)\) where \(\hat{C}=(\hat{c}_{-2}, \hat{c}_{-1}, \hat{c}_{0}, \dots , \hat{c}_N, \hat{c}_{N+1}, \hat{c}_{N+2})\). To estimate the error \(\Vert u(x)-U(x)\Vert _{\infty }\) we must estimate the errors \(\Vert u(x)-\hat{U}(x)\Vert _{\infty }\) and \(\Vert \hat{U}(x)-U(x)\Vert _{\infty }\) separately.
Following (3.6) for \(\hat{U}\) we have
where
and
by subtracting (6.1) and (3.6) we have
Now, first we need to recall some theorems.
Theorem 6.1
Suppose that \(f(x)\in C^{6} \, [0,1]\) and \(|f^{6}(x)|\le L,\forall x\in [0,1]\) and \(\Upsilon =\{0=x_{0}<x_{1}< \cdots <x_{N}=1\}\) be the equality spaced partition of [0, 1] with step size h. If \(S_{\Upsilon }(x)\) be the unique spline function interpolate f(x) at nodes , then there exist a constant \(x_{0},x_{1}, \ldots ,x_{N}\in \Upsilon \) \(\lambda _{j}\) such that \(\forall x\in [0,1]\), where
\(\Vert \cdot \Vert \) represents the \(\infty \) -norm.
Proof
For the proof see [44, 45]. \(\square \)
Now we want to find a bound on \(\Vert \rho -\hat{\rho }\Vert _{\infty }\), we have
by following theorem (6.1) and [46] (p. 218), we obtain
where \(\Vert \phi ^{\prime }(z)\Vert _{\infty }\le M\). Thus, we can rewrite (6.4) as follows
where \(M_{1}= MkL\lambda _{0}h^{8}+MkL\lambda _{1}h^7+\lambda _{0}Lh^8+120\mu \lambda _{4}L\).
It is obvious that the matrix A in (6.2) is a nonsingular matrix, thus we have
taking the infinity norm and then using (6.5), we find
where \(M_{2}=M_{1} \Vert \ A^{-1}\Vert _{\infty }\). Now we will be able to prove the convergence of our present method. Therefore, we recall a following lemma first
Lemma 6.1
The B-splines \(\{B_{-2},B_{-1}, \ldots ,B_{N+2}\}\) satisfies the following inequality
Proof
We know that
At any node \(x_{i}\), we have
Also, we have
Similarly,
Now for any point \(x_{j-1}\le x<x_{j}\), we have
Hence, this proves the lemma. \(\square \)
Now observe that we have
thus taking the infinity norm and using (6.7) and (6.8), we get
Theorem 6.2
Let u(x) be the exact solution of the Eq. (1.1) with the boundary conditions (1.3) and initial condition (1.4) and overspecific conditions (1.5) and also U(x ) be the B-spline collocation approximation to u(x) then the method has second order convergence
where \(\Gamma =\lambda _{0}L h^4+186M_{2}\) is some finite constant.
Proof
From theorem (6.1), we have
thus substituting from (6.9) and (6.10), we have
where \(\Gamma =\lambda _{0}L h^4+186M_{2}\). \(\square \)
Theorem 6.3
The time discretization process ( 3.4) that we use to discretize equation (1.1) in time variable is of the one order convergence.
Proof
See [48]. \(\square \)
We suppose that u(x, t) be the solution of Eq. (1.1) and U(x, t) be the approximate solution by our present method, then we have
(\(\rho \) is some finite constant), thus the order of convergence of our process is \(O(k+h^2)\).
7 Numerical experiments and discussion
In this section, we are going to study numerically the inverse problems (1.1) with the unknown boundary conditions. The main aim here is to show the applicability of the present method for solving the inverse problems (1.1). As expected the inverse problems are ill-posed and therefore it is necessary to investigate the stability of the present method by giving a test problem, thus we compute \(L_{\infty }\) and \(L_{2}\) error norms, using following formula
where \( u_{i}=u(x_j,t_i)\), \(t_n=T\).
Example 7.1
We consider the following generalized Rosenau equation given in [49]
with the boundary conditions
and initial condition
The exact solution for the Rosenau equation (7.1) is known to be a soliton-type solution \(u(x,t)=sech(x-t)\) (see also [5,6,7,8,9,10,11]). The Eq. (7.1) can be rewritten as
where \(f(u)=10u^3-12u^5-1.5u\).
For numerical computation, we take \(T=1,3\) with \(k = 0.002,\) and \(h=0.1\) for estimate \(u(0,t)=f_{1}(t),\) \(u_x(0,t)=f_{2}(t),\) u(x, t) with noisy data and results are reported in Tables 2, 3, 4, 5, 6, 7 and Figs. 1, 2, 3, 4, 5, 6.

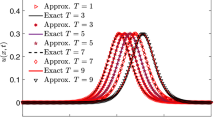
The comparison between the exact and numerical results for \(f_{1}(t)\) of the problem (7.1) with the noisy data using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.4\)

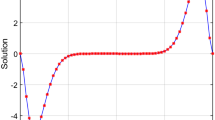
The comparison between the exact and numerical results for \(f_{2}(t)\) of the problem (7.1) with the noisy data using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.4\)

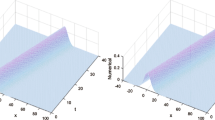
The comparison between the exact and numerical results for u(x, t) of the problem (7.1) with the noisy data by using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.4\)

The comparison between the exact and numerical results for \(f_{1}(t)\) of the problem (7.1) with the noisy data using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.2\)

The comparison between the exact and numerical results for \(f_{2}(t)\) of the problem (7.1) with the noisy data using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.2\)

The comparison between the exact and numerical results for u(x, t) of the problem (7.1) with the noisy data using quintic B-spline method and Tikhonov 2nd when \(\alpha =0.2\)
8 Conclusion
The following results are obtained:
-
1.
The present study, successfully applies the numerical method to inverse problems.
-
2.
Unlike some previous techniques using various transformations to reduce the equation in to more simple equation, the current method does not require extra effort to deal with the nonlinear terms. Therefore, the equations are solved easily and elegantly using the present method.
-
3.
Numerical results show that our approximations of unknown functions using the quintic B-spline method combined with second order Tikhonov regularization, are almost accurate with noisy data.
-
4.
Numerical results show that an excellent estimation can be obtained within a couple of minutes CPU time at pentium(R) 4 CPU 2.10 GHz.
References
Aguero M, Ongay F, Sanchez-Mondragon J (2011) Nonclassical solitary waves for nonlinear ordinary differential equation. Fundam J Mod Phys 1:41–62
Biswas A (2010) 1-Soliton solution of the \(K(m, n)\) equation with generalized evolution and time-dependent damping and dispersion. Comput Math Appl 59:2538–2542
Biswas A, Triki H, Labidi M (2011) Bright and dark solitons of the Rosenau–Kawahara equation with power law nonlinearity. Phys Wave Phenom 19:24–29
Ebadi G, Biswas A (2011) The \(\frac{G^{\prime }}{G}\) method and topological soliton solution of the \(K(m, n)\) equation. Commun Nonlinear Sci Numer Simul 16:2377–2382
Inc M, Ulutas E, Cavlak E, Biswas A (2013) Singular 1-soliton solution of the \(K(m, n)\) equation with generalized evolutions and its subsidiaries. Acta Phys Polon B 44:1825–1836
Antonova M, Biswas A (2009) Adiabatic parameter dynamics of perturbed solitary waves. Commun Nonlinear Sci Numer Simul 14:734–748
Biswas A (2009) solitary wave solution for the generalized kdv equation with time-dependent damping and dispersion. Commun Nonlinear Sci Numer Simul 14:3503–3506
Ebadi G, Mojaver A, Triki H, Yildirim A, Biswas A (2013) Topological solitons and other solutions of the Rosenau-KdV equation with power law nonlinearity. Rom J Phys 58:3–14
Razborova P, Ahmed B, Biswas A (2014) Solitons, shock waves and conservation laws of Rosenau-KdV-RLW equation with power law nonlinearity. Appl Math Inf Sci 8:485–491
Razborova P, Triki H, Biswas A (2013) Perturbation of dispersive shallow water waves. Ocean Eng 63:1–7
Esfahani A, Pourgholi R (2014) Dynamics of solitary waves of the Rosenau-RLW equation. Differ Equ Dyn Syst 22:93–111
Rosenau P (1986) A quasi-continuous description of a nonlinear transmission line. Phys Script 349:827–829
Rosenau P (1988) Dynamics of the dense discrete systems. Prog Theor Phys 79:1028–1042
Park MA (1993) On the Rosenau equation in multidimensional space. Nonlinear Anal 21:77–85
Park MA (1990) On the Rosenau equation. Appl Comput 9:145–152
Chung SK, Ha SN (1994) Finite element Galerkin solutions for the Rosenau equation. Appl Anal 54:39–56
Mittal RC, Jain RK (2012) Numerical solution of general Rosenau-RLW equation using Quintic B-splines collocation method, volume 2012, p 16, Article ID cna-00129
Abtahi M, Pourgholi R, Shidfar A (2011) Existence and uniqueness of solution for a two dimensional nonlinear inverse diffusion problem. Nonlinear Anal 74:2462–2467
Pourgholi R, Dana H, Tabasi SH (2014) Solving an inverse heat conduction problem using genetic algorithm: sequential and multi-core parallelization approach. Appl Math Model 38:1948–1958
Pourgholi R, Esfahani A (2013) An efficient numerical method for solving an inverse wave problem. IJCM. 10
Pourgholi R, Esfahani A, Rahimi H, Tabasi SH (2013) Solving an inverse initial-boundary-value problem by using basis function method. Comput Appl Math 1:27–32
Pourgholi R, Rostamian M, Emamjome M (2010) A numerical method for solving a nonlinear inverse parabolic problem. Inverse Probl Sci Eng 8:1151–1164
Tadi M (1997) Inverse heat conduction based on boundary measurement. Inverse Probl 13:1585–1605
Pourgholi R, Tavallaie N, Foadian S (2012) Applications of Haar basis method for solving some ill-posed inverse problems. J Math Chem 8:2317–2337
Tikhonov AN, Arsenin VY (1977) Solution of Ill-posed problems. V. H. Winston and Sons, Washington, DC
Alifanov OM (1994) Inverse heat transfer problems. Springer, NewYork
Murio DA (1993) The mollification method and the numerical solution of Ill-posed problems. Wiley, NewYork
Pourgholi R, Rostamian M (2010) A numerical technique for solving IHCPs using Tikhonov regularization method. Appl Math Model 34:2102–2110
Molhem H, Pourgholi R (2008) A numerical algorithm for solving a one-dimensional inverse heat conduction problem. J Math Stat 4:60–63
Beck JV, Blackwell B, St CR (1985) Clair, inverse heat conduction: Ill posed problems. Wiley, NewYork
Zhou J, Zhang Y, Chen JK, Feng ZC (2010) Inverse heat conduction in a composite slab with pyrolysis effect and temperature-dependent thermophysical properties. J Heat Transf 132(3):034502
Huanga C-H, Yeha C-Y, Orlande HRB (2003) A nonlinear inverse problem in simultaneously estimating the heat and mass production rates for a chemically reacting fluid. Chem Eng Sci 58(16):3741–3752
Caglar H, Caglar N, Elfaituri K (2006) B-spline interpolation compared with finite element and finite volume methods which applied to two point boundary value problems. Appl Math Comput 175:72–79
Caglar N, Caglar H (2006) B-spline solution of singular boundary value problems. Appl Math Comput 182:1509–1513
Caglar H, Ozer M, Caglar N (2008) The numerical solution of the one dimensional heat equation by using third degree B-spline functions. Chaos Solitons Fract 38:1197–1201
Mittal RC, Jain RK (2012) Application of quintic B-splines collocation method on some Rosenau type nonlinear higher order evolution equations. Int J Nonlinear Sci 13:142–152
Mittal RC, Arora G (2011) Numerical solution of the coupled viscous Burger’s equation. Commun Nonlinear Sci Numer Simul 16:1304–1313
Hansen PC (1992) Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev 34:561–80
Lawson CL, Hanson RJ (1995) Solving least squares problems. SIAM, Philadelphia
Tikhonov AN, Arsenin VY (1977) On the solution of ill-posed problems. Wiley, New York
Martin L, Elliott L, Heggs PJ, Ingham DB, Lesnic D, Wen X (2006) Dual reciprocity boundary element method solution of the Cauchy problem for Helmholtz-type equations with variable coefficients. J Sound Vibr 297:89–105
Elden L (1984) A note on the computation of the generalized cross-validation function for Ill-conditioned least squares problems. BIT 24:467–472
Golub GH, Heath M, Wahba G (1979) Generalized cross-validation as a method for choosing a good ridge parameter. Technometrics 21(2):215–223
de Boor C (1968) On the convergence of odd degree spline interpolation. J Approx Theory 1:452–463
Hall CA (1968) On error bounds for spline interpolation. J Approx Theory 1:209–218
Rudin W (1976) Principles of mathematical analysis, 3rd edn. McGraw-Hill Inc., Pennsylvania
Kadalbajoo MK, Gupta V, Awasthi A (2008) A uniformly convergent B-spline collocation method on a nonuniform mesh for singularly perturbed one-dimensional time-dependent linear convection diffusion problem. J Comput Appl Math 220:271–289
Smith GD (1978) Numerical solution of partial differential equation: finite difference method. Learendom Press, Oxford
Mittal RC, Jain RK (2012) Application of quintic B-spline collocation method on some Rosenau type nonlinear higher order evolution equations. J Inf Comput Sci 7(2):083–090
Gottlieb S, Shu C-W, Tadmor E (2001) Strong stability-preserving high-order time discretization methods. SIAM REV 43(1):89–112
Guraslan G, Sari M (2011) Numerical solutions of liner and nonlinear diffusion equations by a differential quadrature method (DQM). Int J Numer Methods Biomed Eng 27:69–77
Huang CH, Tsai YL (2005) A transient 3-D inverse problem in imaging the time dependentlocal heat transfer coefficients for plate fin. Appl Therm Eng 25:2478–2495
Mittal RC, Jain RK (2012) Cubic B-spline collocation method for solving nonlinear parabolic partial differential equations with Neumann boundary conditions. Commun Nonlinear Sci Numer Simul 17:4616–4625
Rashidinia J, Ghasemi M, Jalilian R (2010) A collocation method for the solution of nonlinear one dimensional parabolic equations. Math Sci 4(1):87–104
Esfahani A (2011) Solitary wave solutions for generalized Rosenau-KdV equation. Commun Theoret Phys 55(3):396–398
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Saeedi, A., Pourgholi, R. Application of quintic B-splines collocation method for solving inverse Rosenau equation with Dirichlet’s boundary conditions. Engineering with Computers 33, 335–348 (2017). https://doi.org/10.1007/s00366-017-0512-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-017-0512-3