
Abstract
In this work, improvised quintic B-spline collocation method is used to solve a class of fourth order singularly perturbed boundary value problems. The proposed method is an extension of classical collocation technique. Posteriori corrections are made to quintic B-spline interpolant and its derivatives, which leads to formation of improvised quintic B-spline interpolant. The improvisation is done by forcing the spline interpolant to satisfy interpolatory and some special end conditions. These corrections are made to achieve optimal order of convergence, which is not possible by standard formation of splines. Convergence analysis is performed using Green’s function approach. Four test problems are solved to show the effectiveness of the proposed method and its improvement over classical quintic and septic B-spline collocation techniques. The technique is found to be stable even for extremely small values of perturbation parameter.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Singularly perturbed boundary value problems (SPBVPs) occur frequently in applied sciences and engineering, for instance convention-diffusion process [1], electromagnetic field [2], fluid mechanics [3], electrohydrodynamic [4], nanofluid [5] and many more. Such problems are characterized by the presence of a very small parameter ‘\(\varepsilon \)’ known as perturbation parameter, with the highest order derivative in the equation. The solution of SPBVPs exhibits a multi-scale character as there is a thin transition layer where the solution varies rapidly, while away from the transition layer, solution has normal behaviour. Many researchers have dealt with both analytic and numeric solution of such problems. Due to the presence of boundary layers, significant efforts are required in developing the efficient algorithm for solving such problems.
Wasow [6] introduced the concept of boundary layers arising in ordinary differential equations. Then, Friedrichs and Wasow [7] gave the name ‘singular perturbation’ to such problems. O’Malley [8] and Nayfeh [9] explored singular perturbation problems and provided more information about such problems. Afterwards, Smith [10] and O’Malley [11] presented the theory and methods to solve such problems. Doolan et al. [12] applied uniform numerical methods for problems having initial and boundary layers. Niederdrenk and Yserentant [13] discussed about the uniform stability of continuous and discrete SPBVPs. Chin and Krasnay [14] applied hybrid asymptotic method whereas Stynes and O’Riordan [15] used finite element method for such problems. Graded-mesh difference scheme was applied by Gartland [16] and Shishkin [17] worked on grid approximation for partial singularly perturbed equations. An adaptively generated grid was used by Qiu and Sloan [18] to analyse the difference approximations of SPBVPs whereas Farrell et al. [19] discussed robust method for boundary layer problems.
Shanthi and Ramanujam [20] discussed asymptotic numerical methods for reaction-diffusion type fourth order SPBVPs. Liu and Xu [21] used Hermite splines in Galerkin method for SPBVPs. Convection–diffusion and flow problems of singular perturbation type were solved numerically by Roos et al. [22] whereas Andargie and Reddy [23] used fitted tridiagonal scheme for such problems. Kadalbajoo and Kumar [24] applied initial-value technique using exponentially fitted finite difference method (FDM) for two point SPBVPs. Prasad and Reddy [25] applied initial-value technique using differential quadrature method. Miller et al. [26] applied fitted numerical methods and discussed about its error estimates. Akram and Rehman [27] used reproducing kernel method for fourth order SPBVPs whereas Mishra [28] applied initial value techniques to solve such problems.
Consider a class of fourth order singularly perturbed boundary value problem as follows:
with the boundary conditions:
where q(t) and r(t) are sufficiently smooth functions in \([{\bar{a}},{\bar{b}}]\) with \(\alpha _{1}\), \(\alpha _{2}\), \(\beta _{1}\), \(\beta _{2}\) \(\in \) \(\mathbb {R}\) and \(0< \varepsilon<< 1\) is the small perturbation parameter.
A number of spline based algorithms have been developed to solve such problems. Aziz and Khan [29], Bawa [30], Rashidinia et al. [31] have used spline approach to solve SPBVPs. Sextic B-spline collocation method was used by Khan et al. [32]. Akram and Amin [33] applied quintic B-spline approach to solve fourth order SPBVPs and later on extended the work to septic B-spline collocation method (SSCM) for these problems [34]. Khan [35] also solved these problems using non-polynomial quadratic spline approach. Jafari et al. [36] solved fractional Riccati differential equations using linear B-spline basis functions. Ramezani et al. [37] solved weakly singular Volterra integral equation using complex B-spline collocation method. Jafari and Tajadodi [38] suggested linear B-spline operational matrix method to solve fractional partial differential equations. Khan et al. [39] obtained analytical solution of time-fractional wave equation using double Laplace transform. The numerical solution of fractional order HIV/AIDS model was studied using Laplace and Sumudu transform [40].
In the present work, a higher order improvised quintic B-spline collocation method (IQSCM) is used to solve fourth order SPBVPs. In the classical quintic B-spline collocation method (QSCM) the unknown function and its derivatives are just replaced by spline approximations for the function and its derivatives respectively. But in IQSCM posteriori corrections are carried out in the quintic B-spline interpolant and its higher order derivatives. These corrections improves the order of convergence and consequentially the results become more accurate. Results are compared to show the improvement of IQSCM over classical QSCM.
Rest of the paper is organized as: in Sect. 2, posteriori improvement to quintic B-spline interpolant and its higher order derivatives is given. In Sect. 3, the proposed method is implemented to the class of fourth order SPBVPs. Section 4 contains the proof of order of convergence using Green’s function approach. In Sect. 5 four examples are discussed and results are compared with the existing methods in the form of tables, which shows the improvement and efficiency of the proposed method. Conclusions are given in Sect. 6.
Posteriori Corrections to Quintic B-Splines
Consider the equally spaced partition \(\varPi \equiv \{{\bar{a}}=t_{0}<t_{1}<\cdots <t_{n}={\bar{b}}\}\) over the interval \([{\bar{a}},{\bar{b}}]\) with the node points \(t_{m} = {\bar{a}} + m\hbar , ~m = 0, 1, \ldots , n\) having step size \(\hbar = ({\bar{b}}-{\bar{a}})/n\) or \(\hbar = t_{m+1}-t_{m}\). As each quintic B-spline \(\mathbb {B}_{m}\) cover 6 elements and each finite element \([t_{m}, t_{m+1}]\) is covered by 6 splines. Therefore ten more node points are required outside the interval \([{\bar{a}},{\bar{b}}]\) to provide support to the B-spline basis functions, which are positioned as \(t_{-5}< t_{-4}< t_{-3}< t_{-2}< t_{-1} < t_{0}\) and \(t_{n}< t_{n+1}< t_{n+2}< t_{n+3}< t_{n+4} < t_{n+5}\). The set of quintic B-spline functions \(\mathbb {B}\{\varPi \} = \{\mathbb {B}_{-2}(t),~\mathbb {B}_{-1}(t),~\mathbb {B}_{0}(t), \ldots ,~ \mathbb {B}_{n+1}(t),~ \mathbb {B}_{n+2}(t)\}\) forms the basis for the subspace \(\mathbb {X}\) of \(\mathbb {C}^{4}[{\bar{a}},{\bar{b}}]\) with dimension \((n+5)\) over the solution region \([{\bar{a}},{\bar{b}}]\), which were defined by [41] and given as follows:

Let v(t) be an element of span \(\mathbb {B}\{\varPi \} = \mathbb {S}_{5}(\varPi )\) \(\equiv \) \(\{w \mid w~\epsilon ~\mathbb {C}^{4}[{\bar{a}},{\bar{b}}]\) and w(t) is a polynomial of degree atmost 5 on each element of the partition \(\varPi \}\). The numerical approximation v(t) can be described in the combination of quintic B-spline functions as follows:
where \(\delta _{m}\)’s are the unknown parameters to be calculated from the boundary conditions and collocation forms. By using Eqs. (2.1) and (2.2) values of v(t) and its derivatives can be evaluated at node points as:
Let the quintic B-spline interpolant (QSI) v(t) of z(t), where \(z(t) \in \mathbb {C}^{10}[{\bar{a}},{\bar{b}}]\) satisfies the following conditions:
-
(I)
the interpolation condition:
$$\begin{aligned} v_{m} = z_{m},~~~~\text {for}~0 \le m \le n, \end{aligned}$$(2.4) -
(II)
at end node points (\(m = 0, 1, n-1, n\)):
$$\begin{aligned}&v^{(2)}_{m} = z^{(2)}_{m} + \frac{\hbar ^{4}}{720}z^{(6)}_{m}, \end{aligned}$$(2.5)$$\begin{aligned}&v^{(3)}_{m} = z^{(3)}_{m} - \frac{\hbar ^{4}}{240}z^{(7)}_{m}, \end{aligned}$$(2.6)$$\begin{aligned}&v^{(4)}_{m} = z^{(4)}_{m} - \frac{\hbar ^{2}}{12}z^{(6)}_{m} + \frac{\hbar ^{4}}{240}z^{(8)}_{m}. \end{aligned}$$(2.7)
Theorem 1
For the QSI v(t) of z(t) which satisfy Eqs. (2.4–2.7), where \(z(t) \in \mathbb {C}^{10}[{\bar{a}},{\bar{b}}]\), the below mentioned relations hold for its higher order derivatives with the equally spaced partition, for \(0\le m \le n,\)
Also the following interpolating error bounds hold:
Proof
It is reported by [42]. \(\square \)
Throughout the paper \(\varLambda \) is a difference operator with \(\varLambda v_{m} = v_{m-1} - 2v_{m} + v_{m+1} \) and \(\varLambda ^{2} v_{m} = v_{m-2} - 4v_{m-1} + 6v_{m} - 4v_{m+1} + v_{m+2}\).
Corollary 1
Let v(t) be the QSI of z(t) satisfying the Eqs. (2.4–2.7), then for the equally spaced partition below mentioned relations hold:
for \(1\le m \le n-1,\)
for \(2\le m \le n-2,\)
Proof
Taking \(\varLambda \) on both sides of Eq. (2.11) and dividing by \(\hbar ^{2}\) we get,
Substituting \(\frac{\varLambda z^{(i)}_{m}}{\hbar ^{2}} = z^{(i+2)}_{m} + \frac{\hbar ^2}{12} z^{(i+4)}_{m}\), where ‘i’ denotes the \(i^{th}\) derivative. Therefore,
Similarly, remaining equations can be proved.
Corollary 2
Below mentioned relations hold at the node points, for \(z(t) \in \mathbb {C}^{10}[{\bar{a}},{\bar{b}}]\),
for \(0\le m \le n,\)
for \(2\le m \le n-2,\)
Proof
Substitute the values of \(z_{m}^{(6)}\), \(z_{m}^{(7)}\) and \(z_{m}^{(8)}\) from Corollary (1) in Theorem (1) to get the required relations.
Lemma 1
For \(z \in \mathbb {C}^{10}[{\bar{a}},{\bar{b}}]\), the below mentioned relations hold at the end node points (for \(j = 6,7,8\)).
Implementation of Proposed Method
Using Theorem (1) and Lemma (1), substituting the value of z(t) in Eqs. (1.1), (1.2) and (1.3),
for \(2 \le m \le n-2,\)
and
Above equations can be written as a system of \((n+1)\) equations in \((n+5)\) unknowns, where the value of four extra unknowns are obtained by using boundary conditions.
The above system reduces to the form:
where \(\mathrm {A}\) is \((n+1)\times (n+1)\) matrix, \(\mathrm {T}\) and \(\mathrm {B}\) are \((n+1)\times 1\) column vectors.
Algorithm of the Method
-
1.
Divide the domain \([{\bar{a}},{\bar{b}}]\) into ‘n’ number of collocation points as \({\bar{a}}=t_{0}<t_{1}<\cdots <t_{n}={\bar{b}}\).
-
2.
Calculate the value of approximate quintic B-spline solution and its higher order derivatives at each node point.
-
3.
Calculate the improvised quintic B-spline approximate solution of \(O(\hbar ^{6})\) using Theorem (1) and Lemma (1).
-
4.
Substitute the value of improvised approximate solution in place of z(t) in Eqs. (1.1) to (1.3).
-
5.
Make the residue zero at each collocation point. Using boundary conditions a system of \((n+1)\) equations in \((n+1)\) unknowns is obtained \(\mathrm {A}\mathrm {T}=\mathrm {B}\).
-
6.
Calculate \(\mathrm {T} = \mathrm {A}^{-1}\mathrm {B}\) (as with the process of formation \(\mathrm {A}\) is diagonally dominant and hence non-singular).
-
7.
Value of \(\mathrm {T}=[ \delta _{0}, \delta _{1}, \ldots , \delta _{n}, \delta _{n+1}]^{T}\) is calculated using MATLAB software. Using this the approximate value of z(t) can be obtained at any point in the domain.
Convergence Analysis for IQSCM
To establish the convergence analysis, approach followed by [42] is used. Rewriting the fourth order SPBVP (1.1) in the operator form as follows:
Let \(\varGamma ^{'}\) denote the perturbation of \(\varGamma \) and \(\mathbf {B}^{'}\) corresponding to \(\mathbf {B}\), then the following relations hold:
for \(0 \le m \le n\),
for \(2 \le m \le n-2\),
Let \(\hat{z}\) is the QSI which satisfy:
Before proceeding for the convergence analysis, let us redefine the Eqs. (1.1) to (1.3) as:
For \(0 \le m \le n,\)
Lemma 2
Let D be the coefficient matrix of \(z^{(4)}\) then \(D^{-1}\) is non-singular and bounded with \(\Vert D^{-1}\Vert _{\infty } \le 1.66. \)
Proof
Using Theorem (1), the coefficient matrix is as follows:
The matrix D is non-singular, as it is strictly diagonally dominant except at the boundary points, which can be made diagonally dominant at those points by taking some suitable transformations. Using definition of norm, one gets:
where
Therefore, from Eq. (4.7), we have:
Let us assume that the equation \(z^{(4)} = 0\) with boundary condition \( \mathbf {B}z = 0\) is uniquely solvable, which implies that there exist a Green’s function \(\mathcal {G}(t,y)\) for the given problem [43].
Denote \(w = z^{(4)}\) and \(u = \hat{z}^{(4)}\), with the assumption that w and u satisfy the boundary conditions. Therefore by using Green’s function, values of z and \(\hat{z}\) can be obtained as :
Further, some operators are defined, which are necessary to perform convergence analysis.
\( {\bar{A}}_{n} : \mathbb {C}[{\bar{a}},{\bar{b}}]\longrightarrow R^{n+1}\), such that \(({\bar{A}}_{n}\omega ) = [\omega (t_{0}),~\omega (t_{1}),\ldots ,~\omega (t_{n})]^{T}\) or \(({\bar{A}}_{n}\omega )_{m} = \omega (t_{m}),\) where \(0 \le m \le n\),
\({\bar{B}}_{n} : R^{n+1}\longrightarrow \mathbb {C}[{\bar{a}},{\bar{b}}],\) piecewise linear interpolation at \({t_{m}}\), where \(0 \le m \le n\),
\({\bar{H}} : \mathbb {C}[{\bar{a}},{\bar{b}}]\longrightarrow \mathbb {C}[{\bar{a}},{\bar{b}}]\), such that \({\bar{H}}\omega (t)= q^{'}\int _{a}^{b}\mathcal {G}(t,y)\omega (y)dy,\) where \(q^{'} = -\frac{q}{\varepsilon }.\)
\({\bar{M}} :\mathbb {C}[{\bar{a}},{\bar{b}}]\longrightarrow \mathbb {C}[{\bar{a}},{\bar{b}}],\) such that \({\bar{M}}\omega (t) = {\bar{G}}~{\bar{A}}_{n}\int _{a}^{b}\mathcal {G}(t,y)\omega (y)dy\), where \({\bar{G}} = diag(q^{'}).\)
By using above operators, the Eqs. (4.4) and (4.6) can be written as:
Since D is invertible, therefore multiplying both sides of Eq. (4.13) by \(D^{-1}\),
where \(Q_{n} = {\bar{B}}_{n}D^{-1}{\bar{A}}_{n}\).
Lemma 3
If \(\omega \) is a continuous function, then \(\parallel {\bar{B}}_{n}D^{-1}{\bar{M}}\omega - {\bar{H}}\omega \parallel _{\infty }\) tends to zero as the step size \(\hbar \) tends to zero, that is, \({\bar{B}}_{n}D^{-1}{\bar{M}}\) converges to \({\bar{H}}\).
Proof
For continuous function \(\omega \),
(as \(\parallel {\bar{B}}_{n}\parallel _{\infty }= 1\), being piecewise linear interpolant and \(\parallel D^{-1} \parallel _{\infty }\) is bounded using Lemma 2.)
Next it is to prove that \(\parallel {\bar{M}}\omega - D{\bar{A}}_{n}{\bar{H}}\omega \parallel _{\infty }\rightarrow 0.\)
Define \(\xi = \int _{a}^{b}\mathcal {G}(t,y)\omega (y)dy\), over a width of \(5\hbar \).
Then by using definition of \({\bar{A}}_{n},\) \({\bar{H}}\) and \(\xi \), we get,
(as \(\parallel {\bar{G}}\parallel _{\infty }\) is bounded with some constant \(a^{'}\).)
Now, by the definition of \(L_\infty \) norm and taking I as the identity matrix,
That is, \(\parallel {\bar{M}}\omega - D{\bar{A}}_{n}{\bar{H}}\omega \parallel _{\infty }\ \le a^{'}O(\eta (\xi ,5\hbar )) \) where \(\eta (\xi ,c)\equiv sup\{\mid \xi (t) - \xi (x)\mid : \mid t - x\mid \le c\}\). This is the modulus of continuity of \(\xi \), which is a continuous function. So \(O(\eta (\xi ,5\hbar ))\rightarrow 0~ as~ \hbar \rightarrow 0\), which implies \(\parallel {\bar{M}}\omega - D{\bar{A}}_{n}{\bar{H}}\omega \parallel _{\infty }\rightarrow 0.\)
Next the main convergence theorem is stated and proved hereunder.
Theorem 2
If (A1) \(q^{'}\) and \(r^{'}\) are continuous in \([{\bar{a}},{\bar{b}}]\).
(A2) The BVP \(\varGamma z = r^{'}, \mathbf {B}z = p_{j}\) has unique solution z, where \(z~\in ~\mathbb {C}^{10}[{\bar{a}},{\bar{b}}].\)
(A3) The problem \(z^{(4)} = 0, \mathbf {B}z = 0\) is uniquely solvable,
Then (S1) The quintic B-spline collocation approximation \(\hat{z}\), defined by Eq. (4.6) exists.
(S2) The global error estimate are:
\(\parallel (z - \hat{z})^{(l)}\parallel _\infty = O(\hbar ^{(6-l)})\) for \(l=0(1)4\)
The local error estimate are:
\(\mid (z - \hat{z})^{(l)}_{t_{m}}\mid = O(\hbar ^{6})\) for \(l=0,1\),
\(\mid (z - \hat{z})^{(l)}_{t_{m}}\mid = O(\hbar ^{4})\) for \(l=2,3\),
\(\mid (z - \hat{z})^{(4)}_{t_{m}}\mid = O(\hbar ^{2})\).
Proof
As \((I + {\bar{H}})^{-1}\) exists and is bounded linear operator by assumption (A3). So by Lemma (3), \({\bar{B}}_{n}D^{-1}{\bar{M}}\longrightarrow {\bar{H}}\). Thus \(({\bar{B}}_{n}D^{-1}{\bar{M}} + {\bar{H}})^{-1}\) exists and is bounded. From this (S1) is proved.
Now we prove (S2), for this first let’s derive the global error estimates.
Consider the problem \(v^{(4)} = \eta ,~ \mathbf {B}^{'}v = O(\hbar ^{6})\). Then by assumption (A3), there exists a cubic polynomial \({\bar{v}}\) which satisfies the following relation:
As \((v - {\bar{v}})^{(4)} = \eta , ~\mathbf {B}^{'}(v - {\bar{v}}) = 0\) is uniquely solvable, therefore by using assumption (A3),
Subtracting Eq. (4.15) from (4.17)
As the operator \((I + {\bar{B}}_{n}D^{-1}{\bar{M}})^{-1}\) is bounded. This implies
Since the problem \((v - {\bar{v}} - \hat{z})^{(4)} = \bar{\eta },~ \mathbf {B}^{'}(v - {\bar{v}} - \hat{z}) = 0\) is uniquely solvable by assumption (A3). Therefore there exists a Green’s function such that:
Thus,
Using Eqs. (4.16) and (4.19) we get:
Using Theorem (1), Eq. (4.20) and triangular inequality, following error bound is obtained:
Similarly, local error estimates can be obtained from Theorem (1). \(\square \)
Numerical Examples
In this section, four problems are solved using IQSCM to demonstrate the applicability of the method. As the analytical results are available, it helps in measuring the accuracy of the scheme. The results are presented in tabular form and are compared with those available in the literature. \(L_{\infty }\) error norm is calculated, which is defined as follows:
where \(z_{m}^{exact}\) represents the exact solution and \(z_{m}^{num}\) represents the numerical solution obtained by IQSCM at the node point \(t_{m}\).
The order of convergence is computed numerically, by using the following formula:
where \(error(n_{1})\) and \(error(n_{2})\) are the maximum absolute errors calculated with \(n_{1}\) and \(n_{2}\) number of partitions respectively.
Example 1
For \(t\in [-1,1]\), consider the following SPBVP [33]:
with the boundary conditions:
The exact solution is given by: \(z(t) = \varepsilon t^8(t^4 - 1)^2 \text {sin}(\varepsilon t).\)
Table 1 shows the comparison of \(L_\infty \) error norm for different values of \(\hbar \) and \(\varepsilon \) with [33] in which QSCM is applied to solve this problem. Comparison indicates that results using IQSCM are far superior than QSCM. Table 2 gives the \(L_\infty \) error norm for different values of \(\hbar \) and very small values of \(\varepsilon \). In Table 3 the order of convergence is found to be \(\hbar ^6\) for different values of \(\varepsilon \) and node points n, which is same as theoretical results. Figure 1 represents the behaviour of exact and numerical solution for \(\varepsilon = 2^{-5}\) and \(n=64\). In Fig. 2 absolute error for different values of \(\varepsilon \) is given.
Example 2
For \(t\in [-1,1]\), consider the following SPBVP [33] [35]:
with the boundary conditions:
The exact solution is given by: \(z(t) = \varepsilon (2t^{4} + \text {cos}(t)).\)
In Table 4 comparison of \(L_\infty \) error norm for different values of \(\hbar \) and \(\varepsilon \) shows that results with IQSCM are better than those reported by [33, 35]. Table 5 represents the \(L_\infty \) error norm for different values of \(\hbar \) and very small values of \(\varepsilon \). In Table 6 the order of convergence is computed for different values of \(\varepsilon \) and node points n. Figure 3 illustrates the behaviour of exact and numerical solution for \(\varepsilon = 2^{-5}\) and \(n=64\). Figure 4 represents the absolute error for different values of \(\varepsilon \).

Exact and approximate solution of Example 1 for \(\varepsilon = 2^{-5}\) and \(n=64\)

Absolute error of Example 1 for different values of \(\varepsilon \)
Example 3
For \(t\in [0,1]\), consider the following SPBVP [34, 35]:
with the boundary conditions:
The exact solution is given by: \(z(t) = (1 - t)^{4}t^{8}\text {sin}(\varepsilon t).\)
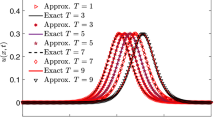
Table 7 shows the comparison of \(L_\infty \) error norm for different values of \(\hbar \) and \(\varepsilon \) with septic B-spline collocation method [34] and non-polynomial quadratic splines method [35]. The results with IQSCM are better than both the methods. Table 8 represents the \(L_\infty \) error norm for different values of \(\hbar \) and very small values of \(\varepsilon \). Table 9 gives the order of convergence for different values of \(\varepsilon \) and node points n. Figure 5 depicts the behaviour of exact and numerical solution for \(\varepsilon = 2^{-5}\) and \(n=64\). Figure 6 shows that absolute error decreases as the value of \(\varepsilon \) decreases.

Exact and approximate solution of Example 2 for \(\varepsilon = 2^{-5}\) and \(n=64\)

Absolute error of Example 2 for different values of \(\varepsilon \)
Example 4
For \(t\in [-1,1]\), consider the following SPBVP [34]:
with the boundary conditions:
The exact solution is given by: \(z(t) = \varepsilon t^{5}(1 - t)^{4}.\)
In Table 10 comparison of \(L_\infty \) error norm for different values of \(\hbar \) and \(\varepsilon \) is given with [34]. Table 11 represents the \(L_\infty \) error norm and in Table 12 order of convergence is given. Figure 7 shows the similarity between exact and numerical solution for \(\varepsilon = 2^{-5}\) and \(n=64\). Absolute error for different values of \(\varepsilon \) and \(n=100\) is represented in Fig. 8.

Exact and approximate solution of Example 3 for \(\varepsilon = 2^{-5}\) and \(n=64\)

Absolute error of Example 3 for different values of \(\varepsilon \)

Exact and approximate solution of Example 4 for \(\varepsilon = 2^{-5}\) and \(n=64\)

Absolute error of Example 4 for different values of \(\varepsilon \)
Conclusion
Fourth order singularly perturbed boundary value problems are successfully solved using superconvergent improvised quintic B-spline collocation method with equally spaced partition of the domain. The posteriori corrections made in quintic B-spline interpolant and its higher order derivatives, resulted in upgradation of order of convergence up to \(\hbar ^6\). Theoretically, global and local error estimates are established using Green’s function approach. A number of examples are worked out to conclude that the proposed method is more efficient than the classic QSCM and SSCM. The numerical results are found to be in good agreement with the exact ones as illustrated by different figures. Order of convergence is also calculated numerically, which matches with the theoretical ones. Comparison with the literature data indicates the efficacy of the present method. It is observed that the IQSCM is stable for extremely small values of \(\varepsilon \).
References
Jacob, M.: Heat Transfer. Wiley, New York (1959)
Hahn, S.Y., Bigeon, J., Sabonnadiere, J.C.: An upwind finite element method for electromagnetic field problems in moving media. Int. J. Numer. Meth. Eng. 24(11), 2071–2086 (1987)
Hirsch, C.: Numerical Computation of Internal and External Flows, vol. 1. Wiley, Chichester (1988)
Ghasemi, S.E., Hatami, M., Ahangar, G.H.R.M., Ganji, D.D.: Electrohydrodynamic flow analysis in a circular cylindrical conduit using least square method. J. Electrostat. 72, 47–52 (2014)
Nadeem, S., Haq, R.: Ul, effect of thermal radiation for megnetohydrodynamic boundary layer flow of a nanofluid past a stretching sheet with convective boundary conditions. J. Comput. Theor. Nanosci. 11, 32–40 (2014)
Wasow, W.: On Boundary Layer Problems in the Theory of Ordinary Differential Equations, Ph.D. Thesis, New York University (1941)
Friedrichs, K.O., Wasow, W.: Singular perturbations of nonlinear oscillations. Duke Math. J. 13(3), 367–381 (1946)
O’Malley, R.E.: Introduction to Singular Perturbations. Academic Press, New York (1974)
Nayfeh, A.H.: Introduction to Perturbation Techniques. Wiley, New York (1981)
Smith, D.R.: Singular Perturbation Theory: An Introduction with applications. Cambridge University Press, Cambridge, New York (1985)
O’Malley, R.E.: Singular Perturbation Methods for Ordinary Differential Equations. Springer, Berlin (1991)
Doolan, E.P., Miller, J.J.H., Schildres, W.H.A.: Uniform Numerical Methods for Problems with Initial and Boundary Layers. Boole Press, Dublin (1980)
Niederdrenk, K., Yserentant, H.: The uniform stability of singularly perturbed discrete and continuous boundary value problems. Numer. Math. 41, 223–253 (1983)
Chin, R.C.Y., Krasny, R.: A hybird asymptotic-finite element method for stiff two point boundary value problems. SIAM J. Sci. Stat. Comput. 4(2), 229–243 (1983)
Stynes, M., O’Riordan, E.: A finite element method for a singularly perturbed boundary value problem. Numer. Math. 50(1), 1–15 (1986)
Gartland, E.C.: Graded-mesh difference schemes for singularly perturbed two-point boundary value problems. Math. Comput. 51, 631–657 (1988)
Shishkin, G.I.: Grid approximation of singularly perturbed parabolic equations with internal layers. Sov. J. Numer. Anal. Math. Model. 3, 393–407 (1988)
Qiu, Y., Sloan, D.M.: Analysis of difference approximations to a singular perturbed two-point boundary value problem on an adaptively generated grid. J. Comput. Appl. Math. 101, 1–25 (1999)
Farrell, P.A., Hegarty, A.F., Miller, J.J.H., O’Riordan, E., Shishkin, G.I.: Robust computational techniques for boundary layers. CRC Press, Boca Raton, Londan (2000)
Shanthi, V., Ramanujam, N.: Asymptotic numerical methods for singularly perturbed fourth-order ordinary differential equations of reaction–diffusion type. Comput. Math. Appl. 46, 463–478 (2003)
Liu, S.T., Xu, Y.: Galerkin methods based on Hermite splines for singular perturbation problems. SIAM J. Number. Anal. 43, 2607–2623 (2006)
Roos, H.G., Stynes, M., Tobiska, L.: Numerical Methods for Singularly Perturbed Differential Equations-Convection-Diffusion and Flow Problems. Springer, Berlin (2006)
Andargie, A., Reddy, Y.N.: Fitted fourth order tridiagonal finite difference method for singular perturbation problems. Appl. Math. Comput. 192, 90–100 (2007)
Kadalbajoo, M.K., Kumar, D.: Initial value technique for singularly perturbed two point boundary value problems using an exponentially fitted finite difference scheme. Comput. Math. Appl. 57, 1147–1156 (2009)
Prasad, H.S., Reddy, Y.N.: Initial-value technique for singularly perturbed two-point boundary value problems using differential quadrature method. Int. J. Math. Sci. Eng. Appl. 5(IV), 407–431 (2011)
Miller, J.J.H., O’Riordan, E., Shishkin, G.I.: Fitted Numerical Methods for Singularly Perturbed Problems. World Scientific Publishing Co. Pvt. Ltd., Singapore (2012)
Akram, G., Rehman, H.: Reproducing kernel method for fourth order singularly perturbed boundary value problem. World Appl. Sci. J. 16(12), 1799–1802 (2012)
Mishra, H.K.: Fourth order singularly perturbed boundary value problems via initial value techniques. Appl. Math. Sci. 8(13), 619–632 (2014)
Aziz, T., Khan, A.: A Spline method for second-order singularly perturbed boundary-value problems. J. Comput. Appl. Math. 147, 445–452 (2002)
Bawa, R.K.: Spline based computational technique for linear singularly perturbed boundary value problems. Appl. Math. Comput. 167, 225–236 (2005)
Rashidinia, J., Ghasemi, M., Mahmoodi, Z.: Spline approach to the solution of a singularly perturbed boundary value problems. Appl. Math. Comput. 189, 72–78 (2007)
Khan, A., Khan, I., Aziz, T.: Sextic Spline solution of a singularly perturbed boundary-value problems. Appl. Math. Comput. 181, 432–439 (2006)
Akram, G., Amin, N.: Solution of a fourth order singularly perturbed boundary value problem using quintic Spline. Int. Math. Forum 7, 2179–2190 (2012)
Akram, G., Amin, N.: Solution of fourth order singularly perturbed boundary value problem using septic Spline. Middle-East J. Sci. Res. 15(2), 302–311 (2013)
Khan, A.: Non-polynomial quadratic Spline method for solving fourth order singularly perturbed boundary value problems. J. King Saud Univ. Sci. 31(4), 479–484 (2017)
Jafari, H., Tajadodi, H., Baleanu, D.: A numerical approach for fractional order Riccati differential equation using B-spline operational matrix. Fract. Calc. Appl. Anal. 18(2), 387–399 (2015)
Ramezani, M., Jafari, H., Johnston, S.J., Baleanu, D.: Complex b-spline collocation method for solving weakly singular volterra integral equations of the second kind. Miskolc Math. Not. 16(2), 1091–1103 (2015)
Jafari, H., Tajadodi, H.: New method for solving a class of fractional partial differential equations with applications. Thermal Sci. 22(Suppl. 1), 277–286 (2018)
Khan, A., Khan, T.S., Syam, M.I., Khan, H.: Analytical solutions of time-fractional wave equation by double Laplace transform method. Eur. Phys. J. Plus 134(4), 163 (2019)
Khan, A., Gomez-Aguilar, J.F., Khan, T.S., Khan, H.: Stability analysis and numerical solutions of fractional order HIV/AIDS model. Chaos, Solitons Fractals 122, 119–128 (2019)
Prenter, P.M.: Splines and Variational Methods. Wiley, New York (1975)
Ellina, M.I., Houstis, E.N.: An \(O(h^6)\) quintic Spline collocation method for fourth order two-point boundary value problems. BIT 28, 288–301 (1988)
Russell, R.D., Shampine, L.F.: A collocation method for boundary value problems. Numer. Math. 19, 1–28 (1971)
Acknowledgements
Ms. Shallu is thankful to CSIR New Delhi for providing financial assistance in the form of JRF with File No. 09/797(0016)/2018-EMR-I. Ms. Archna Kumari is thankful to NPIU, MHRD New Delhi for providing financial assistance under TEQIP-III Project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shallu, Kumari, A. & Kukreja, V.K. An Efficient Superconvergent Spline Collocation Algorithm for Solving Fourth Order Singularly Perturbed Problems. Int. J. Appl. Comput. Math 6, 134 (2020). https://doi.org/10.1007/s40819-020-00885-4
Published:
DOI: https://doi.org/10.1007/s40819-020-00885-4