
Abstract
Honeybees (Apis mellifera) are regularly faced with the task of navigating back to their hives from remote food sources. They have evolved several methods to do this, including compass-directed “vector” flights and the use of landmarks. If these hive-centered mechanisms are disrupted, bees revert to searching for the hive, using an optimal Lévy flight searching strategy. The same strategy is adopted when a food source at a known location ceases to be available. Here, we show that the programming for this Lévy strategy does not need to be very sophisticated or clever on the bee’s part, as Lévy flight patterns can be derived from the Weber–Fechner law in a bee’s odometer. Odometry errors of a different kind occur in desert ants (Cataglyphis spp., Melophorus bagoti). The searching behaviors of these ants are very similar in overall structure to that of honeybees but do not display any Lévy flight characteristics. We suggest that errors in the estimation of distance can be implicitly involved in shaping the structure of systematic search behavior and should not be regarded as merely deficiencies in the odometer.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Many animals have evolved the ability to return to previously visited locations (Healy 1998). For central place foragers, this ability is of utmost importance, as they need to return to their nest, burrow, or den on a regular basis. Accomplishing this feat requires accurate navigation and orientation skills, which have been extensively studied in central place-foraging insects such as bees and ants (Collett et al. 1998; Collett and Collett 2002; Wehner 2003; Cheng et al. 2009). Unavoidably, the accuracy of all navigational mechanisms is limited. However, not all “errors” in animal behavior need necessarily be viewed as impediments to accuracy. Absolute accuracy may not even be desirable in changing and often unpredictable environments. Instead, behaviors that show some degree of variation may often be much more useful, as they allow the animal to adapt to its environment (Staddon 1983). Errors in themselves could also play a meaningful role in shaping and organizing behaviors. We suggest that the errors of distance estimation in navigating insects are implicitly involved in shaping the structure of their systematic search behavior.
A wide range of animals has the ability to estimate travelled distances by odometry (Wolf 2011). Flying insects such as the honeybee Apis mellifera gauge distance by integrating the image motion experienced by the eye en route, the optic flow (Esch and Burns 1995), especially in the lateral and ventral fields of view (Srinivasan et al. 1997). This visually driven odometer is relatively robust to variations in the texture and luminance of the visual environment (Si et al. 2003) and to wind direction (Srinivasan et al. 1996, 1997). Insects that walk on the surface of the earth seem to make little use of optic flow but rely on proprioceptive cues instead (Ronacher and Wehner 1995; Ronacher et al. 2000). In desert ants, distance is measured by a stride integrator (Wittlinger et al. 2006) which accounts for variations in stride length (Wittlinger et al. 2007) or other irregularities (Steck et al. 2009), and even functions accurately in three dimensions (Wohlgemuth et al. 2001; Grah et al. 2005).
The process of odometry is prone to errors. Flying honeybees that had been trained to visit a feeding station at a certain distance from the hive searched at the correct distance in subsequent tests when the feeder was removed (Srinivasan et al. 1997), but the error of this distance estimate was found to increase with the distance travelled. Furthermore, these errors increased linearly with the training distance; in other words, they are proportional to training distance and thus obey the Weber–Fechner law (Cheng et al. 1999). Weber’s law (Weber 1846) was originally formulated to account for some aspects of human perception and psychophysics. There, a just noticeable difference in some perceptual measure, such as the weight of a lifted object, is a constant proportion of the standard measure against which a second measure is compared. Thus in odometry, if 50 m can just be distinguished from 55 m, then the differential threshold is 5 m. If the distance is doubled, then the differential threshold is also doubled to 10 m, so that 110 m can be distinguished from 100 m. In these examples, the distance needs to increase by 10 % for someone to be able to reliably detect the increase. In modern formulations, the standard deviation of a set of measures of one parameter varies linearly with the mean of the measured parameter (e.g., Cheng 1992; Cheng et al. 1999). In desert ants Cataglyphis fortis, the picture is different in odometry: after being trained to forage at a certain distance from the nest, these ants in subsequent tests tended to underestimate the distance travelled. The farther they travelled, the more did they underestimate the distance. The errors of these estimates also increased nonlinearly with training distance, i.e., they “leveled off” at large distances (Sommer and Wehner 2004).
It has been known for 80 years that if bees’ homebound journeys are artificially disrupted, they adopt what appear to be looping, searching flights, and usually manage to (eventually) find their hives (Wolf 1927). The search begins at the location where the bees initially expect to find the hive and is comprised of loops of ever-increasing size that start and end at this location and are directed in different azimuthal directions. This strategy ensures that the area where the target is expected to lie is searched most intensively. Analysis of honeybee flight data has revealed that the distribution of distances moved between turns, “loop lengths,” has an inverse-square power law tail, consistent with the execution of the best possible “Lévy loop” searching strategy; this is seen in both food searches and hive searches (Reynolds et al. 2007a, b; Reynolds 2008, 2012a). Other Lévy loop searching strategies with differently distributed loop lengths are less effective.
Lévy movement patterns first entered the biological literature when Shlesinger and Klafter (1986) proposed that they can be observed in the movement patterns of foraging ants. They are a random walk in which the step lengths have a probability distribution with a “heavy” power law tail. Then, around 10 years ago, it was shown that step length distributions with inverse-square power law tails can be advantageous in random search scenarios (Viswanathan et al. 1999), prompting the “Lévy flight foraging hypothesis.” This hypothesis states that since Lévy movement patterns can optimize search efficiencies, natural selection should have led to adaptations for Lévy movement patterns. According to this hypothesis, organizational levels (physiological, sensorial) that are plastic and acted upon by selection pressure may tune up Lévy movement patterns (Bartumeus 2007).
The searching behavior of desert ants (Cataglyphis spp., Melophorus bagoti) is very similar in overall structure to that of honeybees, with the search path made up of loops of increasing size, centered on the expected target location (Wehner and Srinivasan 1981; Schultheiss and Cheng 2011). However, for M. bagoti ants, the distribution of movement lengths does not display any Lévy-like characteristics. Instead, the distribution of distances moved between turns is well described by a single exponential when the ants are searching for a food source or the nest in the familiar visual surround (Schultheiss and Cheng 2013; Schultheiss et al. 2013) and a mixture of two exponentials when they are searching for the nest in an unfamiliar environment (Schultheiss and Cheng 2011). Exponential distributions also capture the searching patterns of “follower” Temnothorax albipennis ants that become separated from their “leaders” during tandem runs that recruit ants to sources of food or to better nest sites (Franks et al. 2010).
The strategies of both bees and ants are clearly less reliable than an equidistant (Archimedian) spiral search pattern. Such a spiral search could, however, work only if the navigation of bees and ants was precise enough and their visual detection ability was reliable enough, to ensure that all areas are explored and that no intervening regions escape scrutiny. Should the nest be missed, there would be no chance of encountering it a second time because the search path is an ever-expanding spiral. Relying on a spiral search pattern would therefore be disastrous where navigational and detection systems are less than ideal, and even then, this method could be used only for short searches before the inevitable cumulative navigational error became too large to allow a true spiral to be maintained. Switching from spiral to random looping search paths has been observed in the desert isopod Hemilepistus reaumuri when it gets lost after an excursion from its burrow (Hoffmann 1983) and in males of the two-spotted ladybird beetle Adalia bipunctata after encountering a conspecific female (Hemptinne et al. 1996); a spiral search has also been suggested as a part of the looping search behavior of Cataglyphis desert ants returning to their nest (Müller and Wehner 1994).
Thus, when bees and ants are searching for similar goals (a food source or the nest), their movements can be very similar in appearance. Yet, they employ very different search strategies, with bees’ searches but not ants’ searches showing Lévy characteristics. The key to understanding these movement patterns lies in the elucidation of mechanisms underlying the observed patterns. “Without an understanding of mechanisms, one must evaluate each new stress on each new system de novo, without any scientific basis for extrapolation; with such understanding, one has the foundation for understanding” (Levin 1992, p. 1944). This sentiment was recently echoed by Stumpf and Porter (2012) who rightly noted that “a statistically sound power law is no evidence of universality without a concrete underlying theory to support it.” Here, we provide theoretical evidence that Lévy looping flights in honeybees may have arisen because errors in their estimation of distance are proportional to distance itself. Distance errors of a different kind occur in the Australian ant M. bagoti, from which Lévy flight patterns cannot be derived.
Methods
Experimental procedures
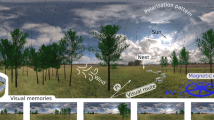
The flight patterns of individual bees made over several hundred meters were recorded using a harmonic radar (Riley et al. 1996). The flight observations were made over a carefully selected (Chittka and Geiger 1995), large area of mown pastureland, approximately 1 × 1.5 km, where the terrain was unusually flat and free from obstacles that would have obscured the radar’s field of view. The radar was set up on the southern edge of the arena, so that it overlooked the hive, and three release points were set up 200 to 250 m from it (Menzel et al. 2005). Honeybees were trained to a feeder that was moved around the hive on a radius of 10 m at 2–3 revolutions per day. This movement suppressed the establishment of vector flights along any fixed compass direction to and from the feeder. Individual honeybees were caught when they left the feeder, fitted with a harmonic radar transponder (Riley and Smith 2002), and carried in an opaque tube to one of the three release points. The bees, which had no opportunity to use their path integration capabilities during this displacement, were then released, and subsequent flight trajectories were recorded using harmonic radar (for experimental details see Menzel et al. 2005). Some brightly colored tents were also placed in the arena to act as artificial landmarks, for separate navigation experiments (Menzel et al. 2005). There were no other large landmarks in the field, but features on the horizon would have provided landmarks that a honeybee’s eye could resolve (Giurfa et al. 1996; Giurfa and Menzel 1997).
A path was created from records of the bee’s position that was normally made every 3 s. However, if the bee flew through an area of radar “shadow” or climbed temporarily above the horizontally scanning radar beam, the missing interval was spanned by joining the last recorded position to the first one to be acquired after the interval. Analyses were based upon 86 recorded flight patterns. Fifty-six flights terminated in the immediate vicinity of the hive. Flight durations ranged from 128 to 7,286 s. Flight lengths ranged from 341 to 14,187 m and had a mean of 2,153 m.
Analysis method for the honeybee search flights
After release with a transponder, the bees engaged in long, looping flights indicative of searching. We used the following criteria to describe the shape of these flights. A bee was described as “arcing” when the radar track showed her flying within 10 m of the release point and seemingly pivoting around the release point. Loops are defined as sections of a track where the bee flew away from the release point and then returned to the location of the release point but did not land (Fig. 1). The length of a loop was taken to be the straight line distance between the center of search and the furthest reach of the loop.

An example flight path of a honeybee after being displaced and then released. The furthest reaches of the loops are indicated (black circle)
The Akaike information criterion (Burnham and Anderson 2004) was used to test whether the harmonic radar data provided more evidence for the distributions of loop lengths having power law
or negative exponential tails
A power law tail is the hallmark of Lévy movement patterns. The power law exponent,\( \mu \), and the exponential decay rate, \( \lambda \), were determined using log-maximum likelihood methods (Clauset et al. 2009). The start of the tail of the distributions \( \left( {a\approx 10m} \right) \) was ascertained by visual inspection of the survival function (the complement of the cumulative distribution function). To construct the survival function, the simulation data for the loop lengths \( \left\{ {{l_i}} \right\} \)were first ranked from largest to smallest\( \left\{ {i=l\ldots n} \right\} \). The probability that a loop length is greater than or equal to \( {l_i} \) (the survival function) was then estimated as \( i/n \).
Results
Weber–Fechner law in the bee’s odometer and Lévy flights
To good approximation, the average absolute difference between the lengths of nth and n + 1th loops,\( \left\langle {\left| {{l_{{n + 1}}}-{l_n}} \right|} \right\rangle \), is proportional to the length of the nth loop, \( {l_n} \) (Fig. 2a; r = 0.76, p < 0.01). This could be a consequence of honeybees attempting to reproduce a loop of length \( {l_n} \) (known from the return flight to the nest) and subsequently producing an outward flight of length \( {l_{{n + 1}}} \) because of errors in distance estimation. Under this interpretation, errors in \( {l_{{n + 1}}} \) are proportional to the “training distance” \( {l_n} \) and therefore obey the Weber–Fechner law (Fechner 1860; Weber 1846). The Akaike weight for a power law distribution of loop lengths is 1.00 which indicates that a power law distribution is convincingly favored over the alternative exponential model of the data. The maximum likelihood estimate for the power law exponent \( \mu =1.88 \), which is close to the optimal value \( \mu =2 \). The maximum likelihood power law provides a good fit to the loop length data (Fig. 2b).

a The average absolute difference between the lengths of nth and n + 1th loops, \( \left\langle {\left| {{l_{{n + 1}}}-{l_n}} \right|} \right\rangle \), as a function of loop length \( {l_n} \)(black circle) and the linear least squares regression (solid line). b Distribution of loop lengths (solid line), the best-fit inverse power law tail (dashed line), and the best fit exponential tail (dotted line) determined by the maximum likelihood method
Mathematical analysis
Lévy flight patterns can be derived from the Weber–Fechner law
We now present a simple mathematical argument which shows how Lévy flight patterns can be derived from the Weber–Fechner law in a bee’s odometer, which implies that \( {l_{{n + 1}}} \), is a random multiple, \( {\eta_{{n + 1}}} \), of \( {l_n} \), i.e.,
where \( {\eta_{{n + 1}}} \)are independent and identically distributed random variables with some distribution, \( f\left( \eta \right) \).
The analysis is straightforward and draws on Gabaix (1999) who sought to understand power law distributions of city sizes. Let \( l_n^i \) be the length of the nth flight made by the ith bee (in a population of N bees) and then normalize each of these lengths by dividing them by \( \sum\limits_{{i = 1}}^N {l_n^i} \)so that \( \sum\limits_{{i = 1}}^N {l_n^i = 1} \) at each stage n. The average normalized flight length is thus a constant and this requires that the average growth rate
Now let \( P\left( {{l_n} > L} \right) \) be the probability of \( {l_n} > L \). It follows that
At steady state, when the distribution of loop lengths is independent of the loop index, n, so that, \( P\left( {{l_n} > L} \right)=P\left( {l>L} \right) \), Eq. (3) becomes
This equation is satisfied by Zipf’s law
since \( \left\langle \eta \right\rangle =1 \). Zipf’s law corresponds to a loop length distribution with an inverse-square power law tail.
This result is supported by data from numerical simulations in which \( {l_{{n + 1}}}=\max \left( {1,{\eta_{{n + 1}}}ln} \right) \) where \( {\eta_{{n + 1}}} \) are independent and identically distributed random variables drawn from an exponential distribution with mean 1 (Fig. 3). The imposition of a minimum loop length (here with length 1) is necessary for the establishment of a steady state. If the minimum loop length was not present, there is no steady state, and the loop length distribution would just be a log-normal distribution, where most loops would have infinitesimal length (Gabaix 1999). Simulation data were collected for 1,000 different realizations of the loop lengths with\( 50\geq n\geq 10 \). If, as hypothesized, these data are scale invariant, then it can be characterized in terms of the geometric average\( \mathop{l}\limits^{-}={{\left( {\prod\limits_{{i = 1}}^N {{l_i}} } \right)}^{1/N }}=\exp \left( {\frac{1}{N}\sum\limits {\ln\,l_i} } \right)\equiv \exp \left( {\left\langle {\ln\,l} \right\rangle } \right) \) where \( \left\langle {\ln\,l} \right\rangle =\frac{1}{N}\sum\limits_{{i = 1}}^N {\ln \,{l_i}} \)is the logarithmic average. This is because the geometric average “normalizes” the ranges being averaged, so that no range dominates the weighting. The maximally non-committal (most parsimonious, “maximally general”) distribution that is consistent with this characterization is obtained by maximizing Shannon’s entropy subject to the constraint that the model distribution be normalized (have probabilities that sum to unity) and has the prescribed geometric average (Kapur 1989). This constrained maximization of Shannon’s entropy yields a truncated inverse power law (Pareto) distribution of loop lengths

Distribution of simulated loop lengths (solid line), the best fit inverse power law tail (dashed line), and the best fit exponential tail (dotted line) determined by the maximum likelihood method
where \( a \) (see below) and \( b \) (length of the longest simulated flight loop) mark the start and end of scale-invariant behavior and \( \mu \approx 1-\frac{1}{{\ln \,a-\left\langle {\ln \, l} \right\rangle }} \) (valid when \( b>>a \)) is Hill’s (1975) maximum likelihood estimator for a power law exponent (Kapur 1989). Any other distribution would require making an alternative hypothesis about how best to characterize the data or invoking characteristics that complement the use of the geometric average. For example, the most parsimonious distribution associated with the alternative hypothesis that the simulation data are not scale invariant and so characterized by the arithmetic average, \( \left\langle l \right\rangle =\frac{1}{N}\sum\limits_{{i = 1}}^N {{l_i}} \), is a truncated exponential distribution
where \( λ \approx \frac{1}{{\left\langle l \right\rangle -a}} \) (valid when \( b>>a \)) is the maximum likelihood estimator for an exponential decay rate (Kapur 1989). The entropic method of Kapur (1989) has not appeared previously in the analysis of movement pattern data. It is reminiscent of log-likelihood methods that produce the same maximum likelihood estimators for \( \mu \) and \( λ \) when Eqs. (6) and (7) are posited as candidate model distributions. In the entropic method, these distributions are not posited but are instead derived from assumptions about how best to characterize average behaviors. A plot of the survival function (the complement of the cumulative distribution function),\( P\left( {l>L} \right) \), was used to ascertain, by visual inspection, the start of power law scaling that is indicative of scale invariance \( \left( {a\approx 10} \right) \) and the goodness of fits of the deduced distributions, Eqs. 6 and 7, to the simulation data.
The simulation data are very well represented by the power law distribution, Eq. 6, but poorly represented by the alternative exponential distribution, Eqn. 7 (Fig. 3). This illustrates that the simulation data can be characterized almost entirely by its geometric average and as a consequence is scale invariant. The maximum likelihood estimate for the power law exponent, \( \mu =2.0 \), is consistent with Zipf’s law and so with the emergence of an optimal Lévy flight searching strategy (Reynolds 2008).
Discussion
Initial evidence for Lévy movement patterns in the wandering albatross (Viswanathan et al. 1996) prompted the suggestion that the adoption of Lévy movement patterns might be widespread in the animal kingdom. The analysis and interpretation of animal movement data is not, however, wholly straightforward and some of the analyses claiming Lévy behavior in the intervening decade have recently been called into question (Edwards et al. 2007; Edwards 2011). Most notably, Edwards et al. (2007) found that the study of Viswanathan et al. (1996) was seriously flawed and suggested that Lévy movements had been wrongly attributed to the wandering albatross; a suggestion that now appears to be overstated (Humphries et al. 2012, Reynolds 2012a, 2012b, Miramontes et al. 2012). Nonetheless, recent studies have provided seemingly compelling evidence that Lévy processes approximate well the movement patterns of a diverse range of marine predator, honeybees, T cells, and bacteria (Escherichia coli), and in most of these cases, they have been attributed to the execution of innate, evolved optimal searching strategies (Korobkova et al. 2004; Reynolds et al. 2007a, b; Sims et al. 2008; Harris et al. 2012), suggesting convergent evolution across taxa. The key to prediction and understanding does, however, lie in the identification of the underlying mechanisms that give rise to the movement patterns (Levin 1992, Stumpf and Porter 2012). Mechanisms have been identified that account for the freely roaming Lévy movement patterns of T cells, E. coli, and the wandering albatross (Tu and Grinstein 2005; Reynolds 2010; Reynolds 2012b). Here, we identified a candidate mechanism for the occurrence of Lévy loop patterns in honeybees. This is significant because honeybee foragers are ideal for testing clear-cut predictions of optimal searching theory as they are not distracted by sex or territorial defense and have few predators, and as a consequence, their movement patterns can be almost exclusively associated with searching. Our analysis stemmed from the observed proportionate growth in loop lengths which were attributed to honeybees attempting unsuccessfully to reproduce loop lengths because of errors in distance estimation. This interpretation of the honeybee flight pattern data has resonance with the observations of Cheng et al. (1999). These authors trained honeybees to fly a specific distance down a tunnel for a reward. After training, the honeybees were tested with the reward absent. On these tests, the bees flew to or just past the expected place of reward, then turned around and flew back. After some distance, they turned back again, and some continued turning back and forth a number of times. Cheng et al. (1999) measured the errors (i.e., the standard deviation across trials of the positions of the first and second turns) in distance estimation as a function of training distance. These errors were proportional to the training distance, thus obeying the Weber–Fechner law (Fechner 1860; Weber 1846). Nonetheless, the Weber–Fechner law is not necessarily an internal characteristic of the bee’s odometer but could be the result of some external environmental stimulation to any of the bee’s (multiple) sensory systems which impact the odometer function or some external force on the bee (such as wind). Whatever is the source of the Weber–Fechner law in the bee’s odometry, we are suggesting that the bees have evolved to co-opt the property in generating Lévy search patterns.
Proportionate growth rates are not confined to honeybees. They also characterize the development of cities (Gibrat 1931) and this is a necessary and sufficient condition for Zipf’s law for cities (Zipf 1949); the striking observation that the number of cities with populations greater than S is proportional to 1/S and so are characterized by a Zipfian distribution, one of a related family of discrete inverse power law probability distributions (Gabaix 1999). Here, we adapted the analysis of Gabaix (1999) to show that Lévy looping in the searching flight patterns of honeybees does not require sophisticated neurological processing as it could be a natural consequence of errors in distance estimation being proportional to distance measured, at all scales. This result is a direct consequence of scale invariance and can be arrived at intuitively. Because the loop length growth process, Eq. 1, is the same at all scales, the final distribution of loop lengths should be scale invariant. This forces the distribution of loop lengths to follow a power law. This scale invariance is not observed in Cataglyphis ants as the variance of the ants’ distance estimates initially increases with the distances travelled but tends to level off at the largest training distance (Sommer and Wehner 2004). In this case, the loop lengths can be exponentially distributed, in accordance with the observations of Schultheiss and Cheng (2011, 2013), albeit for a different species of desert ant.
The Weber–Fechner law minimizes the maximal relative error in distance estimation and consequently could be the result of natural selection (Portugal and Svaiter 2011). However, it is currently not understood why errors of distance estimation in honeybees, but not those seen in desert ants, follow the Weber–Fechner law. Conceivably, there exist sensorial and physiological processes that can tune up directly for Lévy flight search strategies. In navigation, foraging ants walk whereas foraging bees fly. This difference might have led to the evolution of the different cognitive strategies by which bees and ants estimate distances. In odometry, ants and bees might have been subjected to very different ecological and sensorial constraints. Walking ants are in direct physical contact with the substrate, where proprioceptive cues (in the form of the stride integrator) provide a sufficiently accurate measure of their movements relative to the substrate. Flying bees on the other hand are moving through air, where any proprioceptive measures such as energy expenditure or the count of wing beats are susceptible to outside influences such as wind; they would not provide accurate measures of the bee’s movement in relation to the substrate. Here, integration of the experienced optic flow is used instead (Srinivasan et al. 1997). But why these differences in the principal means of odometry should lead to the absence vs. the presence of the Weber–Fechner law is unclear. Both are counting-like processes in which neurally based quantities, representing counts of steps or amount of optic flow, need to be integrated to estimate the accumulated total. In rodents, this kind of counting-like process typically follows the Weber–Fechner law (Meck and Church 1983). Similarly, interval timing processes in vertebrate animals also typically follow the Weber–Fechner law (Cheng and Crystal 2008). In another form of spatial search, in pigeons looking for hidden food experimentally placed at a constant distance from a wall, the scatter in the searching (standard deviation) also varies linearly with the distance that the birds were attempting to measure (Cheng 1990).
The presence or absence of Lévy properties in insect searching behavior may also depend on properties of the environment. In our case, even though the searching behavior of both bees and ants was investigated in comparable contexts (searching for single targets, i.e., a food source and the nest), the visual environments were quite different: the bees’ searches were performed in an open field, while the ants’ searches were performed in a fairly cluttered environment. Thus, these environments differed considerably in the amount of visual information they provide for orientation, and it is possible that bees and ants will employ different search strategies in different visual environments. Both the ecological conditions and the evolutionary history of these search patterns warrant further investigation.
References
Bartumeus F (2007) Lévy processes in animal movement: an evolutionary hypothesis. Fractals 15:151–162
Burnham KP, Anderson DR (2004) Multimodel inference—understanding AIC and BIC in model selection. Sociol Methods Res 33:261–304
Cheng K (1990) More psychophysics of the pigeon’s use of landmarks. J Comp Physiol A 166:857–863
Cheng K (1992) Three psychophysical principles in the processing of spatial and temporal information. In: Honig WK, Fetterman JG (eds) Cognitive aspects of stimulus control. Erlbaum, Hillsdale, pp 69–88
Cheng K, Crystal JD (2008) Learning to time intervals. In: Menzel R (ed) Learning theory and behavior (pp. 341–364). Volume 1 of Learning and memory: a comprehensive reference, 4 volumes (J. Byrne ed.). Elsevier, Oxford
Cheng K, Srinivasan MV, Zhang SW (1999) Error is proportional to distance measured by honeybees: Weber’s law in the odometer. Anim Cogn 2:11–16
Cheng K, Narendra A, Sommer S, Wehner R (2009) Traveling in clutter: navigation in the Central Australian desert ant Melophorus bagoti. Behav Proc 80:261–268
Chittka L, Geiger K (1995) Honeybee long-distance orientation in a controlled environment. Ethol 99:117–126
Clauset A, Shalizi CR, Newman MEJ (2009) Power-law distributions in empirical data. SIAM Rev 51:661–703
Collett TS, Collett M (2002) Memory use in insect visual navigation. Nat Rev Neurosci 3:542–552
Collett M, Collett TS, Bisch S, Wehner R (1998) Local and global vectors in desert ant navigation. Nat 394:269–272
Edwards AM (2011) Overturning conclusions of Lévy flight movement patterns by fishing boats and foraging animals. Ecol 926:1247–1257
Edwards AM, Phillips RA, Watkins NW, Freeman MP, Murphy EJ, Afanasyev V, Buldyrev SV, da Luz MGE, Raposo EP, Stanley HE, Viswanathan GM (2007) Revisiting Lévy walk search patterns of wandering albatrosses, bumblebees and deer. Nat 449:1044–1048
Esch HE, Burns JE (1995) Honeybees use optic flow to measure the distance of a food source. Naturwissenschaften 82:38–40
Fechner GT (1860) Elemente der Psychophysik. Breitkopf und Härtel, Leipzig
Franks NR, Richardson TO, Keir S, Inge SJ, Bartumeus F, Sendova-Franks AB (2010) Ant search strategies after interrupted tandem runs. J Exp Biol 213:1697–1708
Gabaix X (1999) Zipf’s law for cities: an explanation. Q J Econ 114:739–767
Gibrat R (1931) Les inégalités économiques. Librairie du Rucueil Sirey, Paris
Giurfa M, Menzel R (1997) Insect visual perception: complex abilities of simple nervous systems. Curr Opin Neurobiol 7:505–513
Giurfa M, Vorobyev M, Kevan PG, Menzel R (1996) Detection of coloured stimuli by honeybees: minimum visual angles and receptor specific contrasts. J Comp Physiol A 178:699–709
Grah G, Wehner R, Ronacher B (2005) Path integration in a three-dimensional maze: ground distance estimation keeps desert ants Cataglyphis fortis on course. J Exp Biol 208:4005–4011
Harris TH, Banigan EJ, Christian DA, Konradt C, Tait Wojno ED, Norose K, Wilson EH, John B, Weninger W, Luster AD, Liu AJ, Hunter CA (2012) Generalized Lévy walks and the role of chemokines in migration of effector CD8+ T cells. Nat 486:545–548
Healy S (ed) (1998) Spatial representation in animals. Oxford University Press, Oxford
Hemptinne J-L, Dixon AFG, Lognay G (1996) Searching behaviour and mate recognition by males in the two-spot ladybird beetle, Adalia bipunctata. Ecol Entomol 21:165–170
Hill BM (1975) A simple general approach to inference about the tail of a distribution. Ann Stat 3:1163–1174
Hoffmann G (1983) The random elements in the systematic search behaviour of the desert isopod Hemilepistus reaumuri. Behav Ecol Sociobiol 13:81–92
Humphries NE, Weimerskirch H, Queiroz N, Southall EJ, Sims DW (2012) Foraging success of biological Lévy flight recorded in situ. Proc Nat Acad Sci 109:7169–7174
Kapur JN (1989) Maximum-entropy models in science and engineering. Wiley, New York
Korobkova E, Emonet T, Vilar JMG, Shimizu TS, Cluzel P (2004) From molecular noise to behavioural variability in a single bacterium. Nat 428:574–578
Levin SA (1992) The problem of pattern and scale in ecology. Ecol 73:1943–1967
Meck WH, Church RM (1983) A mode control model of timing and counting processes. J Exp Psychol: Anim Behav Proc 9:320–334
Menzel R, Greggers U, Smith AD, Berger S, Brandt R, Brunke S, Bundrock G, Hülse S, Plümpe T, Schaupp F, Schüttler E, Stach S, Stindt J, Stollhoff N, Watzl S (2005) Honey bees navigate according to a map-like spatial memory. Proc Nat Acad Sci 102:3040–3045
Miramontes O, Boyer D, Bartumeus F (2012) The effects of spatially heterogeneous prey distributions on detection patterns in foraging seabirds. PLoS One 7:e34317
Müller M, Wehner R (1994) The hidden spiral: systematic search and path integration in desert ants Cataglyphis fortis. J Comp Physiol A 175:525–530
Portugal RD, Svaiter BF (2011) Weber-Fechner law and the optimality of the logarithmic scale. Minds and Mach 21:73–81
Reynolds AM (2008) Optimal random Lévy-loop searching: new insights into the searching behaviours of central place foragers. Europhys Lett 82:20001
Reynolds AM (2010) Can spontaneous cell movements be modelled as Lévy walks? Phys A 389:273–277
Reynolds AM (2012a) Distinguishing between Lévy walks and strong alternative models. Ecology 93:1228–1233
Reynolds AM (2012b) Olfactory search behaviour in the wandering albatross is predicted to give rise to Lévy flight movement patterns. Anim Behav 83:1225–1229
Reynolds AM, Smith AD, Menzel R, Greggers U, Reynolds DR, Riley JR (2007a) Displaced honeybees perform optimal scale-free search flights. Ecol 88:1955–1961
Reynolds AM, Smith AD, Reynolds DR, Carreck NL, Osborne JL (2007b) Honeybees perform optimal scale-free searching flights when attempting to locate a food source. J Exp Biol 210:3763–3770
Riley JR, Smith AD (2002) Design considerations for an harmonic radar to investigate the flight of insects at low level. Comp Electron Agric 35:151–169
Riley JR, Smith AD, Reynolds DR, Edwards AS, Osborne JL, Williams IH, Carreck NL, Poppy GM (1996) Tracking bees with harmonic radar. Nat 379:29–30
Ronacher B, Wehner R (1995) Desert ants Cataglyphis fortis use self-induced optic flow to measure distances travelled. J Comp Physiol A 177:21–27
Ronacher B, Gallizzi K, Wohlgemuth S, Wehner R (2000) Lateral optic flow does not influence distance estimation in the desert ant Cataglyphis fortis. J Exp Biol 203:1113–1121
Schultheiss P, Cheng K (2011) Finding the nest: inbound searching behaviour in the Australian desert ant, Melophorus bagoti. Anim Behav 81:1031–1038
Schultheiss P, Cheng K (2013) Finding food: outbound searching behavior in the Australian desert ant Melophorus bagoti. Behav Ecol 24:128–135. doi:10.1093/beheco/ars143.
Schultheiss P, Wystrach A, Legge ELG, Cheng K (2013) Information content of visual scenes influences systematic search of desert ants. J Exp Biol 216:742–749. doi:10.1242/jeb.075077
Shlesinger MF, Klafter J (1986) Lévy walks versus Lévy flights. In: Stanley HE, Ostrowski N (eds) On growth and form. Martinus Nijjhof, Amsterdam, pp 279–283
Si A, Srinivasan MV, Zhang SW (2003) Honeybee navigation: properties of the visually driven ‘odometer’. J Exp Biol 206:1265–1273
Sims DW, Southall EJ, Humphries NE, Hays GC, Bradshaw CJA, Pitchford JW, James A, Ahmed MZ, Brierley AS, Hindell MA, Moritt D, Musyl MK, Righton D, Shepard ELC, Wearmouth VJ, Wilson RP, Witt MJ, Metcalfe JD (2008) Scaling laws of marine predator search behaviour. Nat 451:1098–1102
Sommer S, Wehner R (2004) The ant’s estimation of distance travelled: experiments with desert ants Cataglyphis fortis. J Comp Physiol A 190:1–6
Srinivasan MV, Zhang SW, Lehrer M, Collett TS (1996) Honeybee navigation en route to the goal: visual flight control and odometry. J Exp Biol 199:237–244
Srinivasan MV, Zhang SW, Bidwell NJ (1997) Visually mediated odometry in honeybees. J Exp Biol 200:2513–2522
Staddon JER (1983) Adaptive behaviour and learning. Cambridge University Press, Cambridge
Steck K, Wittlinger M, Wolf H (2009) Estimation of homing distance in desert ants, Cataglyphis fortis, remains unaffected by disturbance of walking behaviour. J Exp Biol 212:2893–2901
Stumpf MPH, Porter MA (2012) Critical truths about power-laws. Sci 335:665–666
Tu G, Grinstein G (2005) How white noise generates power-law switching in bacterial flagellar motors. Phys Rev Lett 94:208101
Viswanathan GM, Afanasyev V, Buldyrev SV, Murphy EJ, Prince PA, Stanley HE (1996) Lévy flight search patterns of wandering albatrosses. Nat 381:413–415
Viswanathan GM, Buldyrev SV, Havlin S, da Luz MGE, Raposo EP, Stanley HE (1999) Optimizing the success of random searches. Nat 401:911–914
Weber EH (1846) Tastsinn und Gemeingefühl. In: Wagner R (ed) Handwörterbuch der Physiologie, vol III. Vieweg, Braunschweig, pp 481–588
Wehner R (2003) Desert ant navigation: how miniature brains solve complex tasks. J Comp Physiol A 189:579–588
Wehner R, Srinivasan MV (1981) Searching behaviour of desert ants, genus Cataglyphis (Formicidae, Hymenoptera). J Comp Physiol A 142:315–338
Wittlinger M, Wehner R, Wolf H (2006) The ant odometer: stepping on stilts and stumps. Sci 312:1965–1967
Wittlinger M, Wehner R, Wolf H (2007) The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J Exp Biol 210:198–207
Wohlgemuth S, Ronacher B, Wehner R (2001) Ant odometry in the third dimension. Nat 411:795–798
Wolf E (1927) Über das Heimkehrvermögen der Bienen, I. Zeitschrift für Vergleichende Physiologie 6:227–254
Wolf H (2011) Odometry and insect navigation. J Exp Biol 214:1629–1641
Zipf GK (1949) Human behavior and the principle of least effort. Addison-Wesley, Cambridge
Acknowledgments
This research is funded by the Biotechnology and Biological Sciences Research Council and the Australian Research Council (grant number DP110100608). We thank the Department of Biological Sciences, Macquarie University, for travel funds to bring the authors together to write this paper and Don Reynolds and Tom Collett for stimulating communications during the course of this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by D. Naug
Rights and permissions
About this article
Cite this article
Reynolds, A.M., Schultheiss, P. & Cheng, K. Are Lévy flight patterns derived from the Weber–Fechner law in distance estimation?. Behav Ecol Sociobiol 67, 1219–1226 (2013). https://doi.org/10.1007/s00265-013-1549-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-013-1549-y