
Abstract
Desert ants, Cataglyphis fortis, navigate individually in the salt pans of Tunisia by means of path integration. However, as path integration is error-prone, the ants in addition use visual and olfactory cues to pinpoint their nest entrance. It has been shown that the accuracy of the path integrator as well as the ants’ confidence in that egocentric navigational tool decreases with increasing foraging distance. Here, we show that despite the accumulating errors, even after far-reaching foraging runs path integration provides the ants with surprisingly accurate information regarding the nest position. However, in addition, the ants take into account distant visual cues that are most probably provided by the patterns along the horizon line behind the nest entrance.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Path integration is the predominant navigational tool in the desert ant Cataglyphis fortis and continuously informs the animal about its position relative to the nest. For directional information, the ant uses a compass that is based on skylight and wind (Wehner and Müller 2006; Müller and Wehner 2007), while information about the distances covered is derived from a step integrator (Wittlinger et al. 2006, 2007). Due to its egocentric nature, path integration has an error rate that increases with the length of a foraging trip (Sommer and Wehner 2004; Merkle et al. 2006) with ants homing from 10 m distance pinpointing the nest less accurately than ants homing from 5 m distance (Merkle et al. 2006). Therefore, in addition, Cataglyphis and other individually foraging ants use visual and olfactory cues as geocentric navigational aids that help to compensate for the accumulating errors of the path integrator (for work on interactions of path integration and geocentric cues, see e.g., Wehner et al. 1996; Fukushi 2001; Narendra 2007a, b; Steck et al. 2009; Wehner 2009; Buehlmann et al. 2011, 2012; Cheng et al. 2012; Narendra et al. 2013). By artificially setting path integration and geocentric information (visual or olfactory cues) in conflict, it was shown that there is no strict hierarchy between both navigational tools. For example, cues defining the nest entrance—be it a learned visual cue (Knaden and Wehner 2005; Bregy et al. 2008) or the nest odor (Buehlmann et al. 2012)—dictate the animal’s behavior, when the path integrator is almost run off. In contrast, ants that had not run off their path integrator, did not respond to the odor plume of their own nest (Buehlmann et al. 2012), and were only slightly attracted by a nest-defining visual cue (Bregy et al. 2008). In a study that put visual route memory and path integration in conflict, Collett (2012) could show that instead of prioritizing one of the systems (‘winner takes it all’), the ants rather take a compromise direction based on geocentric and egocentric information.
Most of the studies on the navigational capabilities of C. fortis have been performed at a nutritionally rich coastal inundation plain, where ants during foraging usually do not leave the nest for more than 30–60 m (Sommer and Wehner 2004). However, ants foraging within nutritionally poor salt pan habitats cover much longer distances (Wehner 1987). Recently, it was shown that foraging ants sometimes penetrate the salt pan for several hundreds of meters and display far-reaching crosswind runs, probably in order to locate and follow odor plumes of dead insects killed by heat stress (Buehlmann et al. 2014). The longest running distance observed in that context was more than 1200 m with a maximum distance to the nest of more than 350 m, i.e., more than 35 times longer than the distance for which Merkle and coworkers already found significant homing inaccuracies (Merkle and Wehner 2010).
Here, we show that even during these extraordinary long foraging runs, path integration provides the ant with surprisingly accurate information about the ant’s distance to the nest entrance. However, when visual horizon cues behind the nest were available, experimentally displaced homing ants took a compromise course between geocentric cues and egocentric information.
Materials and methods
Tracking of foraging paths
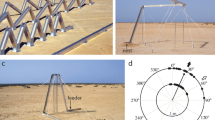
We analyzed homing runs of ants that returned from either 5, 50 m, or more than 150 m distance to the nest. While the 5-m foraging runs were tracked on paper (with the help of a white grid (mesh width 1 m) painted on the desert ground), the 50-m and the over 150-m-long foraging runs were tracked with a GPS measurement device (GARMIN eTrex 20), i.e., one person carrying the GPS device followed the ants at a distance of about 2 m and copied its movements. The procedure of following ants at such distances has been used before, and there has been no indication that the ants’ behavior is disturbed by an experimenter’s presence. GPS coordinates were recorded every second. Due to high satellite coverage within the salt pan, the GPS indicated an expected error regarding the absolute position of <2 m. By following a square painted on the ground, we found that despite the system-based inaccuracy, the characteristics of the square and, therefore, also of followed ant runs are well conserved (Fig. 1a). GPS data were transferred to a PC using Expert GPS, and tracks were plotted with GPS Visualizer and analyzed with custom-made MATLAB routines.

Experimental procedure. a GPS tracking accuracy. GPS tracks were recorded along a square painted on the ground (side length 20 m). Two tracks were recorded simultaneously (solid lines) with two GPS tracking devices, and tracking was repeated after ca. 2 h (dashed lines). b Experimental nests and example foraging runs. Outbound runs (black tracks), displacement (black arrows), and homing runs (yellow tracks) of ants from a nest without (red square) and with obvious visual cues (blue square note hill southwest of blue square). For visualization of all GPS tracks, see Supp. Figs 1–8. c Schematic drawing of the experimental procedure. Foraging ants were followed and tracked either on paper (foraging distance 5 m, orange line) or by GPS (foraging distances, 50 m (green) and more than 150 m (purple)). Ants were captured and displaced by 60 m (black arrows), and their homing performance again was tracked
Experimental procedure
Experiments were performed in a salt pan close to the Tunisian village Menzel Chaker (E010.411 N34.956).We started our investigation with ants from a nest that was situated extraordinarily deep in the salt pan, and, therefore, did not provide any obvious visual cues for homing (Fig. 1b). In order to test the impact of path integration on the homing performance after extensive foraging runs, we tracked foraging ants until they reached a distance of either 5 m, 50 m, or more than 150 m from the nest entrance. The latter group of ants was captured when the ants had travelled from the nest by on average of 183 m (maximum 326 m) and had covered a total walking distance of on average of 327 m (maximum 763 m). We then captured these ants, provided them with a biscuit crumb and released them either at the capture site (“direct homing”) or at a site (“homing after displacement”) that was 60 m away (with the direction between capture and release sites being perpendicular to the direction between nest and capture sites, Fig. 1c). Ants relying on path integration should display a home run parallel to their outbound direction and should start a nest search at a distance corresponding to the distance between capture and release sites.
We tracked the ants during homing until they started their systematic search for the nest. Of those ants that returned from either 50 m or more than 150 m distance, in addition we tracked the first 10 min of nest search.
Using the GPS data, we later analyzed, whether a homing ant followed the direction of a path integration vector (i.e., a vector parallel but opposite to the outbound direction of an ant), whether its search was centered at the position of the fictive nest (i.e., the position where the nest would be, if the displacement of the ant by 60 m would be neglected), and whether search width increased over time. As some of the ants returning from very long distances did not exhibit any conspicuous turning point at the beginning of their nest search, we decided to analyze the first 10 min after the ant had run off 80 % of its home vector. As GPS coordinates were recorded every second, averaging 600 coordinates provided information on where an ant’s search was centered during a time frame of 10 min. We next analyzed the position of the search center, which should be the position where the ant expected the nest to be, and calculated its position relative to the position of the fictive nest. In order to test whether the search width increases over time, we in addition analyzed the average distance of a searching ant from its search center for the first 5 min and the following 5 min of the search.
In order to test the impact of visual cues on homing performances, we repeated our experiments and analysis with a second nest that was situated at the edge of an elevated overgrown hill (diameter of almost circular hill 75 m; height 1.5–2 m; Fig. 1b) that could be used as a horizon cue. As many of these ants found their nest even after displacement, we asked from when on they were able to pinpoint the nest straight. We, therefore, analyzed their heading directions during the last 20 m of homing and compared these directions with those exhibited by the ants when approaching the nest from 40 to 20 m distance.
Results
When we tested displaced ants from the nest that was situated within the salt pan (i.e., lacking any obvious visual cues), these ants followed a direction that was not different from that of ants that were allowed to home without any displacement. For all homing distances, the homing direction of both groups of ants was close to the homing direction as defined by the PI (Fig. 2a, for visualization of all GPS tracks, see Supp. Figure 1–8, GPS data in GPX format can be requested from MK).

Directions of ants homing toward a nest without obvious visual cues (a) or toward a nest in front of a hill (b). Ants were released either at the capture site (“direct homing”, top row) or after a displacement by 60 m (“homing after displacement”, bottom row), with the capture site being 5 m (left column), 50 m (center column), or more than 150 m (right column) away from the nest. Concentric circles depict homing status (20, 40, 60, or 80 % of the PI-defined homing distance covered). Dots depict directions of individual ants after different proportions of their home vector. Arrow heads mean direction of all ants tested; vertical line PI-derived home direction. Homing states at which directions of displaced ants differ from non-displaced ants are depicted in italics. Homing states at which directions of ants homing toward a nest with visual cues differ from ants homing toward a nest without any obvious visual cues are depicted in red (Watson–Wheeler test for directional mean, p < 0.05)
Ants returning from 50 m distance centered their search for the nest at positions close to the fictive nest, i.e., the PI-defined position of the nest entrance (red dots in Fig. 3a). As expected, the error rate (inferred from the distance between the center of the search and the fictive nest) increased with increasing homing distance (Fig. 3b, c). Furthermore, we found that with ongoing search, the ants increased the search area (Fig. 3d), a phenomenon that has been described before (Wehner and Srinivasan 1981; Müller and Wehner 1994).

Analysis of the nest searches. a Position of search centers relative to the fictive nest (origin of the coordinate plane) of displaced ants returning from 50 m distance. Red ants returning to a nest without any obvious visual cues; blue ants returning to a nest in front of a hill. Due to different initial heading directions of foraging ants, i.e., different capture sites of tested ants, the absolute position of the real nest and the nest-defining visual cue relative to the fictive nest is different for different ants. However, as displacement was always into the same direction, nest and visual cues are always positioned on left side of the coordinate plane. Arrows depict average locations of search centers. b Position of search centers relative to the fictive nest (origin of the coordinate plane) of ants returning from more than 150 m distance. For details, see Fig. 3a. Open and filled circles represent ants returning from 150–200 and 200–300 m, respectively; crossed circle ant returning from 326 m. Arrows depict average locations of search centers. c Distances between search centers and fictive nest of ants returning to a nest without any obvious visual cues. Grey boxes are re-drawn from Merkle et al. (2006). Grey line linear trend line based on data from Merkle et al. (2006). Dashed grey line best fitting nonlinear trend line with corresponding equation. d Search density of ants tested without any obvious visual cues during the first and second 5 min search period. Each ant’s position was recorded once per second, and its average distance to the center of the search was calculated. Differences were analyzed with Wilcoxon matched pairs test. e Heading directions of successfully homing ants (foraging distance, >150 m; nest in front of obvious visual cues, n = 17 ants) when ants were 40–20 or 20–0 m away from the nest. For each ant and run segment, the amount of time that was spent in each direction (temporal resolution of GPS tracking 1 s) was calculated. The direction with the highest amount was set to 1, and all other directions were normalized accordingly. Therefore, despite different run lengths of the ants, each ant contributes to the figure and analysis equally. Black arrowhead average heading direction; blue square nest direction. Both datasets are significantly directed (p < 0.001, Raleigh test for directionality) with the nest direction situated within the confidence interval of the mean of the distribution
We next tested ants from a nest that was situated in front of a visually conspicuous hill (Fig. 1b). Ants that were captured at 5 m distance from the nest and were displaced by 60 m directly turned toward the visual cue provided by the hill (Fig. 2b, left column). Ants returning from 50 m distance exhibited a significant turn toward the hill even after they had run off 20 % of the vector (i.e., when they still were ca. 40 m away from the fictive nest) (Fig. 2b, center column). These ants finally focused their search at a position between the fictive and the real nest (Fig. 3a). For 50-m ants that had run off 20 % of their PI vector, the visual cue had a width of on average 38° and height of on average 1.6° (Supp. Figure 9; please note: Ants were not trained to a fixed feeder position but could freely choose the foraging direction. Therefore, release point, fictive nest, and by that also the distance to the hill when having run off 20 % of the PI vector varied from ant to ant).
In the same situation, ants returning from more than 150 m distance showed only a nonsignificant tendency toward the hill while covering the first 80 % for their homing distances (Fig. 2b, right column). However, as some of these ants were returning from distances of up to 326 m distance, even when having run off 80 % of their home vector these ants were still far away from the nest. Therefore, it is hard to fully understand the influence of visual cues at the population level. We, therefore, in addition analyzed whether ants returning from more than 150 m were affected by the hill during the last 30 m of their vector-guided home run. When analyzing this final part of the home run, displaced ants deviated significantly more from the PI-defined direction than control ants (data not shown, Watson–Williams test for equal means, p < 0.05). Therefore, also these ants finally followed a compromise heading between path integration and geocentric information. In addition, these ants again focused their final nest search on a position situated somewhere between the fictive nest and the nest-defining visual cues (Fig. 3b).
We finally tested whether any of the displaced ants would be able to find their nest entrance. When we followed the ants for a maximum of 45 min during their nest searches, 17 of the 20 ants returning from more than 150 m distance to the nest situated in front of the hill finally pinpointed their nest (Supp. Figure 8), while only three succeeded when returning to the nest that was situated far away from obvious visual cues (Supp. Figure 4; impact of visual cues: Fisher test, p < 0.01). Interestingly, those ants that finally found the nest entrance despite the displacement headed for the nest directly already from a distance of more than 20 m (Fig. 3e), suggesting that the visual cues defining nest location provided guidance over quite large distances. When testing ants, that returned from 50 m distance 6 of 20 ants succeeded with hill (Supp. Figure 6), vs. 0 of 20 ants without hill (Supp. Figure 2); Fisher test, p < 0.03.
Discussion
Path integration continuously informs foraging desert ants about their position relative to the nest (Wehner 2009). However, it was shown that already after foraging distances of only 20 m, ants miscalculate the nest position by on average more than 4 m (Merkle et al. 2006). Motivated by our findings that in their salt pan habitat, individual ants sometimes travel away from the nest for more than 350 m (Buehlmann et al. 2014), we raised the question whether despite lacking obvious visual cues, ants returning from these extremely long foraging trips still can pinpoint the nest accurately. We therefore tested homing performances of ants that returned from 5 m, 50 m, or more than 150 m distance. When testing ants from a nest that could not be pinpointed by visual cues (Fig. 1b), these ants indeed followed a path integration-based home vector (Fig. 2a). However, some of the ants returning from more than 150 m (Supp. Figure 3d, j, k) exhibited curved home runs that might point at the additional use of environmental cues like substratum slope or the distant landmark skyline. It should be mentioned here that the accuracy in localizing the nest (which decreases with increasing homing distances and results in an increased target area, Fig. 3a–c) is not linearly linked with the error in the homing direction. Despite their increased target area, ants homing from long distances pinpoint this area from further away. Therefore, just for trigonometric reasons, the error of the heading direction not necessarily increases with increasing foraging distance.
Path integration accuracy after long foraging runs
Ants returning from 50 m distance still focused their search close to the position of the fictive nest (Fig. 3a, c, median distance of 5.9 m; for comparison, see values of ants returning from 5, 10, or 20 m as recorded by Merkle et al. 2006 and re-drawn in Fig. 3c). As expected, the error increased, when ants returned from more than 150 m distance (Fig. 3b). However, even after these long runs that covered total distances of sometimes more than 1000 m, displaced ants focused their search at a position that was on average only 14.5 m away from the fictive nest (Fig. 3c). Although extremely long foraging runs are most probably performed by old experienced foragers (Wehner 2003), it has been shown that experience does not increase path integration accuracy (Merkle and Wehner 2009). However, experience might be the reason why ants leaving the nest for more than 150 m sometimes displayed extraordinary straight outbound runs (e.g., Supp. Figure 3a, c, d, i and Supp. Figure 4s). As path integration errors increase when ants exhibit sharp turns (Müller and Wehner 1988), the rather straight outbound runs might be one reason for the unexpected accuracy of homing ants. Theoretical analyses (Cheung and Vickerstaff 2010; Vickerstaff and Cheung 2010) compared different path integration models for their tolerance to noise (i.e., how do inaccuracies in the estimation of distance or direction effect the readout of the path integrator). With most models, path integration failed dramatically beyond a certain radial distance from home. However, even the model with the best performance, the so-called allothetic directed walk model, resulted in errors that linearly increase with walking distance (Cheung and Vickerstaff 2010).Therefore, the mechanism behind our observed nonlinear relationship between homing distance and pinpointing accuracy remains unclear. One possible explanation, however, could be that the observed error is not only due to PI inaccuracy. Instead, ants could deliberately underperform home vectors to guarantee ending up on the familiar side of the nest. The combination of PI inaccuracy and the latter strategy could lead to a nonlinear relationship between homing distance and pinpointing accuracy.
Coaction of path integration and visual cues
One strategy to overcome the accumulating path integration error is the use of nest-defining visual or olfactory cues (Steck et al. 2009; Wehner 2009; Buehlmann et al. 2012). Visual cues can outcompete path integration, when both systems are set in conflict (Knaden and Wehner 2005; Narendra 2007b; Narendra et al. 2013) or can at least result in compromise directions (Bregy et al. 2008; Collett 2012). In the salt pan where the experiments were conducted, most of the nests are situated along the border of the pan, i.e., in close vicinity to a surrounding overgrown area. As ants focus their food search on the inner part of the salt pan (Buehlmann et al. 2014), homing ants could set a direction using the visual panorama behind the nest. In order to investigate the impact of visual guidance on the homing performance after extremely long foraging trips, we repeated our displacement experiments with ants from a nest that was situated close to an overgrown elevation (Fig. 1b). When we now displaced ants by 60 m that had travelled from the nest for 5, 50, or more than 150 m, most of the ants at some point deviated from the PI direction and followed a direction that seemed like a compromise between path integration and the nest-defining visual cues (Fig. 2b). Surprisingly, ants that returned from 50 m distance switched to the compromise already after having covered only 20 % of their homing distance (i.e., at a position, where the hill covered a view angle of 38° width and 1.6° height, Supp. Figure 9), suggesting that the panoramic visual cues are taken into account already from far away. When—in former studies—visual cues and PI were put in conflict, visual cues outcompeted PI only, when the ants had unreeled their PI vector by at least 80 % (Bregy et al. 2008). However, even when nest-defining visual cues are presented to an ant that has unreeled his PI vector by only few percent, the ant’s path becomes deflected by the visual cues (Bregy et al. 2008). Hence, although in this situation PI finally prevails, visual cues are not totally neglected. The ants rather take a compromise course between visual cues and path integration (Collett 2012). How much an ant relies on the readout of its path integrator has been shown to depend on the visual information provided by the habitat (Narendra 2007b; Buehlmann et al. 2011; Cheung et al. 2012). Ants living in visually enriched habitats that become experimentally displaced usually follow their PI-derived vector only for a short distance (Fukushi 2001; Beugnon et al. 2005), while ants from visually poor habitats run off the vector almost completely (Merkle et al. 2006). Even within the same species, the weighing of path integration against visual cues seems to depend on the habitat. Melophorus bagoti ants that were trained and tested in a visually poor habitat relied slightly more on their path integrator than ants from the same species that were trained and tested in their natural habitat, the visually rich Australian grass land (Cheng et al. 2012).
Search patterns after long foraging runs
An ant that has unreeled its PI vector starts a systematic search for the nest entrance (Wehner and Srinivasan 1981). When analyzing the nest search of displaced ants, we found that ants displayed a wider search pattern both after prolonged search duration (Fig. 3d) and when the ants returned from longer distances (Fig. 3d). These findings support former results from detailed characterizations of the general search patterns (Müller and Wehner 1994; Merkle et al. 2006): Ants primarily focus a dense search at the fictive nest, but over time increase the width of their search loops with re-visiting the fictive nest every now and then (Müller and Wehner 1994). Furthermore, the width of the search, which can be interpreted as the ant’s confidence in its PI-derived information on the nest position, is increased when ants return home from longer distances (Merkle et al. 2006).
During their search, the ants do not only take into account PI-derived information but also use visual cues. Like bees, the ants compare their current retinal image with an image taken upon leaving the nest. By decreasing the difference between the current and the stored images, the insects finally pinpoint the nest (Cartwright and Collett 1983; Collett 2010; Wystrach et al. 2012). Therefore, even ants that are displaced by up to 30 m from a nest succeed in homing, as long as the nest is situated within a visually rich panorama (Wehner et al. 1996; see also Wystrach et al. 2011, 2012; Narendra et al. 2013). Due to our experimental displacement (Fig. 1b, c), ants that had unreeled their PI vector ended up about 60 m away from their nest. When following the ants for up to 45 min during their nest search, 85 % of the ants that returned from more than 150 m distance to the nest situated in front of a hill finally located their nest entrance, while only 15 % of the ants succeeded in finding the nest without any obvious visual cues. The success of the latter 15 % suggests that despite the absence of obvious cues, the environment provided at least some geocentric cues that guided the ants’ home. However, obviously, the success rate was increased when the visual cues were more prominent. Already when being 20–40 m away from the nest, the ants’ heading was significantly directed toward the nest entrance (Fig. 3e), again suggesting a long functional range of the visual cues. Interestingly, when returning from shorter distances, only 6 of 20 ants succeeded in localizing the nest in front of the hill. As the ants’ confidence in the PI-defined nest position depends on the foraging distance they have covered (Merkle et al. 2006), ants returning from 50 m most probably rated PI higher and although first taking a compromise course between visual cues and PI finally did not follow the visual cues that would have guided them home. Ants returning from more than 150 m distance, however, finally neglected PI information and followed the visual cues into the nest. These differences again suggest that whether or not an ant relies more on egocentric information or on geocentric cues depends on the length of the current foraging run and, therefore, on the ant’s confidence in its PI-derived information.
References
Beugnon G, Lachaud JP, Chagné P (2005) Use of long-term vector information in the neotropical ant Gigantiops destructor. J Insect Behav 18:415–432
Bregy P, Sommer S, Wehner R (2008) Nest-mark orientation versus vector navigation in desert ants. J Exp Biol 211:1868–1873
Buehlmann C, Cheng K, Wehner R (2011) Vector-based and landmark guided navigation in desert ants inhabiting landmark-free and landmark-rich environments. J Exp Biol 214:2845–2853
Buehlmann C, Hansson BS, Knaden M (2012) Path integration controls nest-plume following in desert ants. Curr Biol 22:645–649
Buehlmann C, Graham P, Hansson BS, Knaden M (2014) Desert ants locate food by combining high sensitivity to food odors with extensive crosswind runs. Curr Biol 24:960–964
Cartwright BA, Collett TS (1983) Landmark learning in bees—experiments and models. J Comp Physiol A 151:521–543
Cheng K, Middleton EJT, Wehner R (2012) Vector-based and landmark-guided navigation in desert ants of the same species inhabiting landmark-free and landmark-rich environments. J Exp Biol 215:3169–3174
Cheung A, Vickerstaff R (2010) Finding the way with a noisy brain. PLoS Comput Biol 6:e1000992
Cheung A, Hiby L, Narendra A (2012) Ant navigation: fractional use of the home vector. PLoS One 7(11):e50451
Collett M (2010) How desert ants use a visual landmark for guidance along a habitual route. Proc Natl Acad Sci USA 107:11638–11643
Collett M (2012) How navigational guidance systems are combined in a desert ant. Curr Biol 22:927–932
Fukushi T (2001) Homing in wood ants, Formica japonica: use of the skyline panorama. J Exp Biol 204:2063–2072
Knaden M, Wehner R (2005) Nest mark orientation in desert ants Cataglyphis: what does it do to the path integrator? Anim Behav 70:1349–1354
Merkle T, Wehner R (2009) Repeated training does not improve the path integrator in desert ants. Behav Ecol Sociobiol 63:391–402
Merkle T, Wehner R (2010) Desert ants use foraging distance to adapt the nest search to the uncertainty of the path integrator. Behav Ecol 21:349–355
Merkle T, Knaden M, Wehner R (2006) Uncertainty about nest position influences systematic search strategies in desert ants. J Exp Biol 209:3545–3549
Müller M, Wehner R (1988) Path integration in desert ants, Cataglyphis fortis. Proc Natl Acad Sci USA 85:5287–5290
Müller M, Wehner R (1994) The hidden spiral: systematic search and path integration in desert ants, Cataglyphis fortis. J Comp Physiol A 175:525–530
Müller M, Wehner R (2007) Wind and sky as compass cues in desert ant navigation. Naturwissenschaften 94:589–594
Narendra A (2007a) Homing strategies of the Australian desert ant Melophorus bagoti I. Proportional path-integration takes the ant half-way home. J Exp Biol 210:1798–1803
Narendra A (2007b) Homing strategies of the Australian desert ant Melophorus bagoti II. Interaction of the path integrator with visual cue information. J Exp Biol 210:1804–1812
Narendra A, Gourmaud S, Zeil J (2013) Mapping the navigational knowledge of individually foraging ants Myrmecia croslandi. Proc R Soc Lond B Biol 280:20130683
Sommer S, Wehner R (2004) The ant’s estimation of distance travelled: experiments with desert ants, Cataglyphis fortis. J Comp Physiol A 190:1–6
Steck K, Hansson BS, Knaden M (2009) Smells like home: desert ants, Cataglyphis fortis, use olfactory landmarks to pinpoint the nest. Front Zool 6:5
Vickerstaff R, Cheung A (2010) Which coordinate system for modelling path integration? J Theor Biol 263:242–261
Wehner R (1987) Spatial organization of foraging behavior in individually searching desert ants, Cataglyphis (Sahara Desert) and Ocymyrmex (Namib Desert). Exp Suppl 54:15–42
Wehner R (2003) Desert ant navigation: how miniature brains solve complex tasks. J Comp Physiol A 189:579–588
Wehner R (2009) The architecture of the desert ant’s navigational toolkit (Hymenoptera: Formicidae). Myrmecol News 12:85–96
Wehner R, Müller M (2006) The significance of direct sunlight and polarized skylight in the ant’s celestial system of navigation. Proc Natl Acad Sci USA 103:12575–12579
Wehner R, Srinivasan MV (1981) Searching behavior of desert ants, Genus Cataglyphis (Formicidae, Hymenoptera). J Comp Physiol 142:315–338
Wehner R, Michel B, Antonsen P (1996) Visual navigation in insects: coupling of egocentric and geocentric information. J Exp Biol 199:129–140
Wittlinger M, Wehner R, Wolf H (2006) The ant odometer: stepping on stilts and stumps. Science 312:1965–1967
Wittlinger M, Wehner R, Wolf H (2007) The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J Exp Biol 210:198–207
Wystrach A, Beugnon G, Cheng K (2011) Landmarks or panoramas: what do navigating ants attend to for guidance? Front Zool 8:21
Wystrach A, Mangan M, Philippides A, Graham P (2012) Snapshots in ants? New interpretations of paradigmatic experiments. J Exp Biol 216:1766–1770
Acknowledgments
This study is dedicated to Ruediger Wehner, without whom we never would have got in contact with the fascinating desert ant Catagylphis. The study was financed by the Max Planck Society. We thank Katharina Franke for assistance during the field experiments and Alexander Warmbold and Dieter Kaiser for help with the computational analyses and the MATLAB programming.
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical standard
The international, national, and/or institutional guidelines for the care and use of animals have been followed.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Huber, R., Knaden, M. Egocentric and geocentric navigation during extremely long foraging paths of desert ants. J Comp Physiol A 201, 609–616 (2015). https://doi.org/10.1007/s00359-015-0998-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-015-0998-3