
Abstract
In this paper, the \(\mathcal{H}_{\infty}\) filtering problem for a class of short-time switched discrete-time linear systems is investigated. For such systems, switching always occurs in some short interval. Since the error state may attain large unacceptable values in short-time switching intervals, besides the asymptotic stability of error dynamics, the boundedness of error state is also significant for short-time switched systems. Thus the designed filter is composed of two parts: asymptotic filter, based upon the existing results, ensures the asymptotic stability of the system during normal, relatively long interval, and finite-time filter ensures system to be finite-time bounded during the short interval of switching, which is the main concern in this paper. By introducing the concept of finite-time boundedness, the proposed filter is formulated as a set of sub-filters ensuring the error dynamics \(\mathcal{H}_{\infty}\) finite-time bounded in the short switching interval. Finally, a numerical example is provided to illustrate the effectiveness of this approach.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Switched systems are typical sub-class of hybrid dynamical systems. A switched control system is composed of a family of subsystems described by differential or difference equations and a switching rule orchestrating the switching between the subsystems. This class of systems has attracted much attention in control theory and practice during recent decades. Switched systems can be efficiently used to model many practical systems which are inherently multi-model in the sense that several dynamical systems are required to describe their behavior. Many physical processes inherently exhibit switched and hybrid nature [7, 18, 30], and switched systems arise in many engineering applications, such as in motor engine control [2], constrained robotics [3], and networked control systems [42], etc. Furthermore, more and more engineering applications resort to switching strategy to improve control performance [5, 16, 27, 29]. Generally, the stability and stabilization problems are the main concern in the field of switched systems. Lyapunov function techniques have been proved to be effective to deal with stability and stabilization problems for switched systems [4, 6, 26, 41]. Dwell time and average dwell time approaches were employed to study the stability and stabilization of time-dependent switched systems [13, 25, 39]. For more details of the recent results on the basic problems in stability and stabilization for switched systems, the reader is referred to [20], and the references cited therein.
On the other hand, the issue of state filtering or estimation has been investigated intensively for many decades in continuous and discrete domain. When a priori information on the external noise is not precisely known, the celebrated Kalman filtering scheme is no longer applicable. In this case, \(\mathcal{H}_{\infty}\) filter was introduced in [11]. After it, a lot of results have been proposed in \(\mathcal{H}_{\infty}\) filtering problem [12, 28, 38, 40]. Many results are also available with specific applications such as for networked systems [8, 35], time-varying stochastic systems [9, 31, 34], and so on. More recently, \(\mathcal{H}_{\infty}\) filtering for discrete-time switched systems with state delays by switched Lyapunov function approach are addressed in [10]. \(\mathcal{H}_{\infty}\) filter design for switched descriptor systems by solving LMIs in which filtering is envisaged both with proportional and proportional integral observers is presented in [15]. Combining the single Lyapunov function method with Finsler’s lemma and utilizing the parameter-dependent idea, the robust filtering is investigated for uncertain switched discrete-time systems by [14]. The \(\mathcal{H}_{\infty}\) filtering problem under asynchronous switching is investigated in [36]. Based on average dwell time approach, the \(\mathcal{H}_{\infty}\) filtering problem is studied in [32].
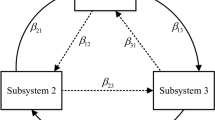
It is worth mentioning that almost all the reported literature about filtering problem for switched systems only focuses on asymptotic filter design which is defined on the infinite time interval. Only a few results concern the error dynamics performance in a finite time interval, which is an interesting and important topic from theoretical as well as practical point of view. For example, switched systems are often used to model systems with abrupt structural variations resulting from occurrence of some inner discrete events in the system such as failure and repair of machine in manufacturing systems. In practice such occurrence of inner discrete events is more likely to appear in some short finite time interval, and for most of the remaining time the system works in a fixed mode without any occurrence of switching which can be viewed as the normal working interval. It is well known that switching between asymptotically stable subsystems can lead to instability due to the obvious reason that the overshoot caused by the transients of the subsystem may destroy the Lyapunov stability [17, 19]. The boundedness of state during a fixed interval, which almost relies on the transient response, is supposed to be affected significantly by switching among several subsystems. This fact will be proved by an example in this paper. As in practice the switching will not always occur for infinite times, the switching strategy is often designed that switching most probably occurs in some short time intervals of concern, and there exists no switching for remaining time interval. Hence we call it short-time switching, as illustrated in Fig. 1.

An illustrative diagram for switching which only occurs in some short interval
Under this class of short-time switching, it is easy to see that the asymptotic stability of overall control system will not be affected by the switching which only occurs in some short time interval, and the asymptotic stability property is absolutely determined by the stability property of each subsystem. Hence, for state filtering or estimation problem for switched system under short-time switching, the asymptotic filter designed independently for each subsystems can guarantee the asymptotic stability of error dynamics. But, to avoid the error state reaching the unacceptable large values caused by switching during the short time interval, the boundedness of error state needs to be considered when we design state filters. Thus, two classes of filters are involved in design procedure. The first one is the asymptotic filter for each subsystem which is supposed to be active in the most of running time in which no switching occurs, and the second one is the boundedness filter which can ensure the error state bounded in a prescribed limit and will be active in the short-time switching interval. Although many results on asymptotic filtering or state estimation for switched systems are available, the boundedness filter design guaranteeing the error state boundedness for switched system has not been investigated fully. This is the main motivation of our study.
In this paper we present a methodology of designing \(\mathcal{H}_{\infty}\) filter for short-time switched systems under arbitrary switching, which ensures not only the asymptotic stability of error dynamics but also the boundedness of error state. By classifying the running time of a system into the short-time switching interval and the relatively long interval, two classes of filters are proposed. In the relatively long intervals, the sub-filters are designed according to some existing \(\mathcal{H}_{\infty}\) filtering results for non-switched systems, which guarantee the asymptotic stability of switched system. Afterwards, \(\mathcal{H}_{\infty}\) finite-time filtering problem is considered, which is the main contribution of our study. By introducing the concepts of finite-time boundedness and \(\mathcal{H}_{\infty}\) finite-time boundedness, which concern the state boundedness in a specified interval [1], the \(\mathcal{H}_{\infty}\) finite-time filtering problem formulating a set of sub-filters is proposed, ensuring the error dynamics \(\mathcal{H}_{\infty}\) finite-time bounded in short-time switching intervals. Altogether, the \(\mathcal{H}_{\infty}\) filters ensure both asymptotic stability and finite-time boundedness properties of error dynamics. A numerical design example is given to illustrate our result.
The remainder of this paper is organized as follows. In Sect. 2 the problem formulation and some preliminaries are introduced. The finite-time boundedness analysis is presented in Sect. 3. Based on the analysis results, the filtering for short-time switched linear system is given in Sect. 4. In Sect. 5 a numerical design example is presented. Conclusions are given in Sect. 6.
Notation
The notation used in this paper is fairly standard. The superscript “T” stands for matrix transposition, ℝn denotes the n-dimensional Euclidean space and ℤ+ represents the set of nonnegative integers, the notation ∥⋅∥ refers to the Euclidean norm. In addition, in symmetric block matrices, we use ∗ as an ellipsis for the terms that are introduced by symmetry and \(\operatorname {diag}\{ \cdots\}\) stands for a block-diagonal matrix. λ min(P) and λ max(P) stand for the smallest and the largest eigenvalue of matrix P. The notation P>0 (P≥0) means that P is real symmetric and positive definite (semi-positive definite).
2 Preliminaries and Problem Formulation
In this paper, a switched linear discrete-time system is described as follows:



where x(k)∈ℝn is the discrete-time state vector, y(k)∈ℝp is the measured output, z(k)∈ℝq is the output to be estimated, ω(k)∈ℝr is the noise signal which satisfies
\(\sigma(k):\mathbb{Z}^{ +} \to \mathcal{I}: = \{ 1,2, \ldots,N \}\) is a piecewise constant function of time, called switching law or switching signal, taking value in a finite index set \(\mathcal{I}: = \{ 1,2, \ldots,N \}\), where N>0 is the number of subsystems; A i ,B i ,C i ,D i and E i are time-invariant matrices with appropriate dimensions.
In this paper, we consider the switching signal σ exhibiting short-time switching property. For this class of switching signal, the time interval can be classified as \(\varGamma_{n}^{s}\) and \(\varGamma_{n}^{l}\). \(\varGamma_{n}^{s}\) denotes the nth short-time switching interval, during which switching is supposed to occur. For this switching interval, the switching sequence can be defined as \(\mathcal{S}_{n}: = \{ k_{0}^{n},k_{1}^{n}, \ldots,k_{m}^{n}, \ldots,k_{M}^{n} \}\). Here \(k_{0}^{n}\) denotes the initial instant of \(\varGamma_{n}^{s}, k_{m}^{n}\) denotes the mth switching instant in \(\varGamma_{n}^{s}\), and \(k_{M}^{n}\) stands for the last instant in \(\varGamma_{n}^{s}\). Explicitly, the length of interval \(\varGamma_{n}^{s}\) can be figured out as \(\mathcal{T}_{n} = k_{M}^{n} - k_{0}^{n}\). It is assumed that the value of \(\mathcal{T}_{n}\) is pre-specified in the filter design process. It should be pointed out that it may be difficult to exactly determine \(\mathcal{T}_{n}\) for each interval \(\varGamma_{n}^{s}\), but without loss of generality, the maximal value of \(\mathcal{T}_{n}, n = 1,2, \ldots\) , can be estimated before design process in a practical situation, and a filter can be easily designed by choosing the maximal value into our following results. \(\varGamma_{n}^{l}\) represents the nth (relatively long) interval in which no switching occurs. By the classification of time interval, the running time of system can be divided into amounts of short-time switching intervals and relatively long time intervals. Hence we introduce the time interval sequence which is defined as \(\bar{\mathcal{S}}: = \{ \varGamma_{1}^{s},\varGamma_{1}^{l},\varGamma_{2}^{s},\varGamma_{2}^{l} \ldots,\varGamma_{n}^{s},\varGamma_{n}^{l}, \ldots\}\) . It is assumed that \(\bigcup_{n = 1,2, \ldots} (\varGamma_{n}^{s} \cup\varGamma_{n}^{l}) = \mathbb{Z}^{ +}\) and \(\varGamma_{n}^{s} \cap\varGamma_{m}^{l} = \emptyset, \forall n,m\).
Here, we are interested in constructing a filter of the following form:


where \(\hat{x}(k) \in \mathbb{R}^{n}\) is the state vector of the filter, \(\hat{z}(k) \in \mathbb{R}^{q}\) is the estimated output, and \(\hat{A}_{i}, \hat{B}_{i}, \hat{C}_{i}, \hat{D}_{i}, i \in \mathcal{I}\), are matrices with appropriate dimensions to be determined.
Considering system (1a)–(1c) and (3a), (3b), we obtain the filtering error system as:


where

The filtering problem investigated here consists of obtaining an estimate \(\hat{z}\) of the signal z via a causal filter (3a), (3b) with a guaranteed \(\mathcal{H}_{\infty}\) performance which is described as follows:
Problem 1
Given a scalar γ>0, construct a filter in the form of (3a), (3b) which guarantees filtering error system (4a), (4b) to be asymptotically stable with ω(k)=0 and under zero initial condition, and for every non-zero input ω(k) satisfying (2), it holds that
Under arbitrary switching, based on the search of single quadratic Lyapunov function of the form V(x(k))=x T(k)Px(k), we can derive an \(\mathcal{H}_{\infty}\) filter (3a), (3b) solving Problem 1. This approach is similar to the way of constructing an \(\mathcal{H}_{\infty}\) filter without switching behavior. However, it is explicit that such an approach often yields very conservative results. A successfully improved \(\mathcal{H}_{\infty}\) filter design approach given in [6] and [10] is the switched Lyapunov function of the form V(x(k))=x T(k)P i x(k), which concerns the case of arbitrary switching occurring along with the running time of the system. However, for short-time switched system which only switches in some short-time interval, the above Lyapunov function approach will be not suitable in \(\mathcal{H}_{\infty}\) filter construction. Since it is assumed that the length of each relatively long interval \(\varGamma_{n}^{l}\) will be sufficiently large, it implies that the average dwell time of the switched system will be large. By the familiar results based on average dwell time, if the average dwell time is sufficiently large, the switched system is asymptotically stable as long as each subsystem is asymptotically stable [13]. Therefore, a common or switched Lyapunov function approach is more conservative since stability of each subsystem is already sufficient to ensure the switched system’s stability, especially for the particular case where the switching occurs for finite times.
However, in actual applications, the asymptotic stability is not sufficient for short-time switched system since the fast switching behavior may cause the error states reach very large values during the short-time switching interval \(\varGamma_{n}^{s}\), which is not acceptable in filtering process in a practical situation. This problem is illustrated by the following example.
Example 1
(Motivation example)
A switched discrete-time linear system with two subsystems is given as follows:

By traditional linear system theory, the following sub-filters can be easily obtained without considering switching between two subsystems:

which guarantee the asymptotic stability of each error subsystem. A short-time switching signal is proposed, assuming that the switching interval sequence has a finite number of elements and is defined as \(\bar{\mathcal{S}}: = \{ \varGamma_{1}^{s},\varGamma_{1}^{l} \}\), where the short-time switching interval is \(\varGamma_{1}^{s}: = [0,40]\) and the switching signal is given as follows:

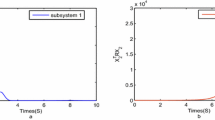
Then the relatively long interval is \(\varGamma_{1}^{l}: = [41,\infty)\) in which the subsystem 1 works for the remaining time. The initial state is assumed as \(x(0) = [ 1 \ 1 ]^{T}, \hat{x}(0) = [ 0 \ 0 ]^{T}\). The simulation results are shown in Figs. 2 and 3.

The value of error state ∥ξ(k)∥

The value of error output z e (k)
From Figs. 2 and 3 we can see that the error state ξ(k) and the error output z e (k) reach very large values in the short-time switching interval, which obviously could not be acceptable in a practical situation. In Example 1 we observe that the asymptotic stability of error dynamics can be established if the subsystem 1 most of the time works in \(\varGamma_{1}^{l}\). However, another important system property we are concerned with is the boundedness of the error state during the short-time interval \(\varGamma_{1}^{s}\) in which the switching is likely to occur. So we conclude from the example that the switching behavior can influence the boundedness of error state significantly. Secondly, we deduce that only the asymptotic stability of error dynamics is not sufficient for switched system in filtering process, and the boundedness of error state needs full consideration during the interval in which switching occurs. This example can be viewed as a motivation example introducing the concerns about error state boundedness during a short-time switching interval, which is not only theoretically interesting and challenging, but also very important in practical filtering for switched control systems.
To make our result more practical, the boundedness of the state and \(\mathcal{H}_{\infty}\) performance in each finite interval \(\varGamma_{n}^{s}\) should also be investigated, which is neglected by most of the reported literature. By the above discussion, the filter designed in our paper is considered to be composed by two parts: filter \(\mathcal{F}_{1}\) is the \(\mathcal{H}_{\infty}\) finite-time filter which works in short-time switching interval \(\varGamma_{n}^{s}\), and filter \(\mathcal{F}_{2}\) is the \(\mathcal{H}_{\infty}\) asymptotic filter which will be active for relatively long interval \(\varGamma_{n}^{l}\). The generic scheme of the filtering for short-time switched system is illustrated in Fig. 4.

Generic scheme of \(\mathcal{H}_{\infty}\) filter for short-time switched system
The \(\mathcal{H}_{\infty}\) asymptotic filter \(\mathcal{F}_{2}\) can be directly derived from the published literature on non-switched systems which guarantee the asymptotic stability and \(\mathcal{H}_{\infty}\) performance for each subsystem for sufficient long interval \(\varGamma_{n}^{l}\). On the other hand, the \(\mathcal{H}_{\infty}\) finite-time filter will limit the error state attaining unacceptably high values and retain the \(\mathcal{H}_{\infty}\) performance in a finite-time interval \(\varGamma_{n}^{s}\), which is the main contribution of our paper.
At first, the notion of finite-time boundedness and \(\mathcal{H}_{\infty}\) finite-time boundedness is introduced for the switched system (1a)–(1c). The so-called finite-time boundedness concerns the boundedness of discrete state x(k) over finite discrete-time interval [0,M],M∈ℤ+, with respect to a given initial condition x 0. This concept is expressed by the following definition:
Definition 1
([1])
The switched system (1a)–(1c) with ω(k) satisfying (2) is said to be finite-time bounded with respect to (δ,ε,d,R,M), where 0≤δ<ε,R is a positive definite matrix and M∈ℤ+, if x T(k)Rx(k)<ε 2,∀k∈{1,2,…,M}, whenever \(x_{0}^{T}Rx_{0} < \delta^{2}\).
When the \(\mathcal{H}_{\infty}\) performance is considered, the \(\mathcal{H}_{\infty}\) finite-time boundedness is given as follows:
Definition 2
([37])
The switched system (1a)–(1c) is said to be \(\mathcal{H}_{\infty}\) finite-time bounded with respect to (δ,ε,d,γ,R,M), where 0≤δ<ε,γ>0,R is a positive definite matrix and M∈ℤ+, if the following conditions are satisfied:
-
(1)
The switched system (1a)–(1c) is finite-time bounded (according to Definition 1);
-
(2)
Under zero-initial condition, the output z(k) satisfies
$$ \sum_{k = 0}^{M} z^{T}(k)z(k) < \gamma^{2}\sum_{k = 0}^{M} \omega^{T}(k)\omega(k) $$(6)for any exogenous disturbance ω(k) satisfying (2).
If we consider the error state boundedness during the nth short-time switching interval \(\varGamma_{n}^{s}: = [k_{0}^{n},k_{M}^{n}]\), with \(\mathcal{T}_{n} = k_{M}^{n} - k_{0}^{n}\) denoting the length of this interval, the problem can be described as:
Problem 2
Given the switched system (1a)–(1c) and filter (3a), (3b), find matrices \(\hat{A}_{i}, \hat{B}_{i}, \hat{C}_{i}, \hat{D}_{i}, i \in \mathcal{I}\), ensuring the \(\mathcal{H}_{\infty}\) finite-time boundedness of error dynamics (4a), (4b) with respect to \((\delta,\varepsilon,d,\gamma,R,\mathcal{T}_{n})\) in \(\varGamma_{n}^{s}\).
Obviously, investigating the solution of Problem 2 together with the \(\mathcal{H}_{\infty}\) asymptotic filter \(\mathcal{F}_{2}\) designed and activated in \(\varGamma_{n}^{l}\), the Problem 1 is solved for short-time switched system. Hence, in this paper we mainly focus on solving Problem 2.
Before ending this section, we present a simple lemma, which will be used in the proof of our main results.
Lemma 1
For a positive matrix P, there exists a matrix Ω such that P−(Ω T+Ω)≥−Ω T P −1 Ω is satisfied.
Proof
Since matrix P is positive, there always exists a positive matrix P −1 such that (P−Ω)T P −1(P−Ω)≥0, which directly leads to P−(Ω T+Ω)≥−Ω T P −1 Ω. □
3 \(\mathcal{H}_{\infty}\) Boundedness Analysis in Finite-Time Interval
In this section we first consider the \(\mathcal{H}_{\infty}\) finite-time boundedness analysis problem. Before deriving the conditions for finite-time boundedness of the switched system (1a)–(1c), some explicit facts are recalled. For a symmetric positive definite matrix R∈ℝn×n, it is easy to verify that R can be factorized according to R=(R 1/2)T R 1/2, where R 1/2∈ℝn×n is a symmetric positive definite matrix. And for any positive definite matrix R∈ℝn×n, there always exists R −1∈ℝn×n which is positive definite. Now we are ready to derive our first result as follows.
Theorem 1
Given γ>0 and the switched system (1a)–(1c), if there exists a set of positive matrices P i and positive scalars λ 1>0,λ 2>0,μ≥1 such that the following conditions are satisfied, \(\forall(i,j) \in\mathcal{I} \times\mathcal{I}\),



then the switched system (1a)–(1c) is \(\mathcal{H}_{\infty}\) finite-time bounded in \(\varGamma_{n}^{s}\) with respect to \((\delta,\varepsilon,d,\gamma,R,\mathcal{T}_{n})\).
Proof
It is easy to deduce from (8) that
Let \(V_{i}(k) = x^{T}(k)P_{i}x(k), i \in\mathcal{I}\), for each subsystem; then we let
where θ i (⋅):ℤ+→{0,1} and \(\sum_{i \in \mathcal{I}} \theta_{i}(k) = 1\), be the function indicating the activated subsystem. Then, the following results can be derived:

In (8), the case i=j shows that the switched system (1a)–(1c) works in the ith mode, and the case i≠j implies that the switched system (1a)–(1c) is switching from subsystem i to j at a switching instant \(k, k \in\varGamma_{n}^{s}\). Thus, from (10) we infer

From (11), we can write:

By the facts \(\mu\ge 1, k - k_{0}^{n} \le \mathcal{T}_{n}\) and \(\sum_{k = 0}^{\infty} \omega^{T}(k)\omega(k) < d^{2}\), we can obtain
We know that for \(\forall i \in\mathcal{I}\) and \(\forall k \in\varGamma_{n}^{s}\)
where \(Q_{i} = R^{ - 1 / 2}P_{i}R^{ - 1 / 2}, i \in\mathcal{I}\).
On the other hand, for \(\forall i \in\mathcal{I}\) we can write
Using the fact that x T(0)Rx(0)≤δ 2 we get

Altogether, with (13), (14) and (15), the following inequality can be derived:
Then by condition (5) we have:

Since \(\sup_{i \in \mathcal{I}}\{ \lambda_{\max} (Q_{i}) \} \le\lambda_{2}, \inf_{i \in \mathcal{I}}\{ \lambda_{\min} (Q_{i}) \} \ge\lambda_{1}\), from condition (9) we obtain the following relation:

Thus we can conclude that the switched system (1a)–(1c) is finite-time bounded in \(\varGamma_{n}^{s}\) with respect to \((\delta,\varepsilon,d,R,\mathcal{T}_{n})\).
Now, let us consider the relation

From (8), we have

From (16) and (17) we can derive

The above inequality implies that

Since the zero-initial condition, we can assume \(V(k_{0}^{n}) = 0\); thus we have

As V(k)≥0, we can write:

Thus, the finite-time \(\mathcal{H}_{\infty}\) performance in \(\varGamma_{n}^{s}\) is satisfied and the proof is completed. □
Remark 1
We note that the result in Theorem 1 depends on parameter μ which deserves some comments. Let us consider the particular case of μ=1. From the switched Lyapunov function approach proposed in [6], we can easily derive that the condition (8) is the exact sufficient condition guaranteeing the switched system (1a)–(1c) to be asymptotically stable with \(\mathcal{H}_{\infty}\) performance γ under arbitrary switching. But in our results, the condition that μ=1 is relaxed into μ≥1 in finite-time boundedness sense for short-time switched system. On the other hand, additional constraint for finite-time boundedness has to be satisfied, where conditions (7) and (9) should be satisfied with respect to \((\delta,\varepsilon,d,\gamma,R,\mathcal{T}_{n})\). Here, we can also see that the finite-time boundedness and asymptotic stability are the two independent concepts. Only for the particular case of μ=1, Theorem 1 ensures both asymptotic stability and finite-time boundedness. Although there exist many results on Lyapunov asymptotic stability, finite-time boundedness also needs our full investigation, which has been neglected by most of the previous work.
Remark 2
From the practical point of view, we are often interested in the minimal value of the state bound ε with the given performance. With a fixed μ, we let λ 1=1,λ 2=κ and conditions (7) and (9) in Theorem 1 become:


Together with (8), we can formulate the following optimization problem to obtain minimal value of state bound ε in \(\varGamma_{n}^{s}\):
with the minimal value \(\varepsilon_{\min} = \sqrt{\kappa \mu^{\mathcal{T}_{n}}\delta^{2} + \gamma^{2}d^{2}}\). Furthermore, it should be pointed out that this result depends on a fixed value of μ. In order to find a suitable μ, a one-parameter search may be necessary. Nevertheless, this does not represent a hard computational problem. More generally, the optimal value of the convex combination of γ 2 and ε 2, i.e., J(ρ)=ργ 2+(1−ρ)ε 2, where 0≤ρ≤1, can be obtained by

with fixed μ.
Based on Theorem 1 and applying Lemma 1, we present the following theorem:
Theorem 2
Given γ>0 and the switched system (1a)–(1c), if there exists a set of positive matrices P i , matrix Ω and positive scalars λ 1>0,λ 2>0,μ≥1 such that the following conditions are satisfied, \(\forall(i,j) \in\mathcal{I} \times\mathcal{I}\),



then the switched system (1a)–(1c) is \(\mathcal{H}_{\infty}\) finite-time bounded in \(\varGamma_{n}^{s}\) with respect to \((\delta,\varepsilon,d,\gamma,R,\mathcal{T}_{n})\).
Proof
From Lemma 1, condition (22) can be transformed into

Pre-multiplying \(\operatorname {diag}(I,I,\varOmega^{ - T},I)\) and post-multiplying \(\operatorname {diag}(I,I,\varOmega^{ - 1},I)\), we get

Then pre-multiplying \(\operatorname {diag}(I,I,P_{j},I)\) and post-multiplying \(\operatorname {diag}(I,I,P_{j},I)\), we derive the following:

Thus, together with (21) and (23), the proof is completed by Theorem 1. □
Remark 3
To make the filtering design feasible, a new additional matrix Ω is introduced so that the matrices P j are not involved in any product with A i and B i .
4 \(\mathcal{H}_{\infty}\) Finite-Time Filtering for Switched Systems
In this section, Problem 2 is considered at first. Then, based on the solution of Problem 2, an \(\mathcal{H}_{\infty}\) filter design algorithm for short-time switched system solving Problem 1 is proposed. We will present sufficient conditions for existence of filter (3a), (3b) ensuring the error system (4a), (4b) \(\mathcal{H}_{\infty}\) finite-time bounded, and the methodology of constructing the \(\mathcal{H}_{\infty}\) finite-time filter based on Theorem 2. Here, we will mention that the value of switching signal function σ(k) is needed to be known at a discrete time k so that the index of activated subsystem can be detected online. In this context, a necessary assumption is given:
Assumption 1
It is assumed that the switching sequence \(\mathcal{S}_{n}\) is not known a priori, but the instantaneous value of σ(k) is available at a discrete time k.
Assumption 1 corresponds to practical implementations where the switched system is supervised by a discrete-event system and the discrete state value of σ(k) is available in real time. Now the filter design is proposed by the following theorem:
Theorem 3
Given γ>0 and the switched system (1a)–(1c) under Assumption 1, if there exist sets of matrices P i,1,P i,2,P i,3, matrices W,X,Y,Ψ i,1,Ψ i,2,Ψ i,3,Ψ i,4, nonsingular matrix V, and positive scalars κ≥1,μ≥1 such that the following conditions are satisfied, \(\forall(i,j) \in\mathcal{I} \times\mathcal{I}\),




then there exists a filter in the form (3a), (3b) with matrices
where
U=V
−1(W−YX), such that the error system is
\(\mathcal{H}_{\infty}\)
finite-time bounded in
\(\varGamma_{n}^{s}\)
with respect to
\((\delta,\varepsilon,d,\gamma,\mathcal{R},\mathcal{T}_{n})\), where
 .
.
Proof
At first, we prove that the matrix W−YX is nonsingular such that (W−YX)−1 exists. Let us suppose that (26) holds, then it can be derived that
which indicates that X and Y are nonsingular. Then, pre-multiplying (28) with [X −T −I] and post-multiplying it with [X −1 −I]T, we deduce:

which implies that W−YX is nonsingular. □
From (24) and Schur complement formula, we have

From (25) and Schur complement formula, we can obtain the following inequality:

By Lemma 1 it yields

By choosing

(29) and (30) can be rewritten as

Then we let

Hence the following results can be derived:

where \(\varPsi_{i,1} = YA_{i}^{T}X + YC_{i}^{T}\hat{B}_{i}^{T}U + V\hat{A}_{i}^{T}U, \varPsi_{i,2} = \hat{B}_{i}^{T}U, \varPsi_{i,3} = V\hat{C}_{i}^{T}, \varPsi_{i,4} = \hat{D}_{i}^{T}\).
Furthermore, it can be easily derived that:

Thus, from the results derived above, pre-multiplying (26) with \(\operatorname {diag}(\varLambda^{ - 1},I, \varLambda^{ - 1},I)\) and post-multiplying it with \(\operatorname {diag}(\varLambda^{ - T},I, \varLambda^{ - T},I)\), we can easily obtain the following relation:

Together with (27) and (31) and based on Theorem 2 we can conclude that the error system is \(\mathcal{H}_{\infty}\) finite-time bounded in \(\varGamma_{n}^{s}\) with respect to \((\delta,\varepsilon,d,\gamma,\mathcal{R},M)\).
Remark 4
In a practical situation, the related parameter \(\mathcal{T}_{n}\) may be difficult to obtain. However, from Theorem 3 it is easy to see that we can choose \(\mathcal{T}^{*} \ge \mathcal{T}_{n}, \forall n = 1,2, \ldots\) , to guarantee Theorem 3 to be satisfied. This implies that a maximal length of short-time intervals can be employed in filter design. Apparently the value of \(\mathcal{T}^{*}\) is easier and more practical to be estimated before design process than the determination of each \(\mathcal{T}_{n},n = 1,2, \ldots\) .
Remark 5
In Theorem 3 we see that the conditions are not in LMI form. However, once we fix parameter μ, these conditions can be turned into LMI-based feasibility problem. Based on Theorem 3 with fixed μ, an optimized filter with the optimal value of J(ρ)=ργ 2+(1−ρ)ε 2, where 0≤ρ≤1, can be obtained by solving the following optimization problem:
with a fixed parameter μ. Furthermore, the optimal value of parameter μ can be found by an unconstrained nonlinear optimization approach, which can be implemented on some numerical optimization software tools such as the function fminsearch in the optimization toolbox of MATLAB to ascertain a locally convergent solution.
Based on optimization problem (33), a detailed design algorithm is given to solve Problem 1 which includes two parts: \(\mathcal{H}_{\infty}\) finite-time filter \(\mathcal{F}_{1}\) and \(\mathcal{H}_{\infty}\) asymptotic filter \(\mathcal{F}_{2}\).
\(\mathcal{H}_{\infty}\) filter design algorithm for short-time switched system:
Step 1 Initialize a value of μ=1, set a variation value Δμ>0 and termination value \(\bar{\mu}\).
Step 2 Setting μ=μ+Δμ, solve optimization problem (33) with fixed μ.
Step 3 When the optimization problem (33) is solvable for the first time, record the value of μ as μ min. Then, if \(\mu\ge\mu_{\min} + \bar{\mu}\) , terminate the procedure. Otherwise, record the parameters (μ,J min) pair-wise and return to Step 2.
Step 4 Select \(\tilde{\mu}\) with the smallest J min recorded in Step 3. Obtain the locally optimized finite-time filter \(\mathcal{F}_{1}\) matrices and ascertain the local optimal value of \(J_{\min}^{*}\) near \(\tilde{\mu}\) by an unconstrained nonlinear optimization approach.
Step 5 Given the performance index γ obtained in Step 1–4, figure out \(\mathcal{H}_{\infty}\) asymptotic filter \(\mathcal{F}_{2}\) matrices by traditional \(\mathcal{H}_{\infty}\) filter design approach.
Remark 6
By using the techniques similar to [14] and [41], the results in this paper can be readily extended to the switched system with norm-bounded parameter uncertainties or polytopic uncertainties.
5 Numerical Design Example
Example 2
A switched discrete-time linear system with two subsystems is given as follows:

We consider the short-time switching signal which assumes that the switching interval sequence has finite number elements and is defined as \(\bar{\mathcal{S}}: = \{ \varGamma_{1}^{s},\varGamma_{1}^{l} \}\), where the short-time switching interval is \(\varGamma_{1}^{s}: = [0,10]\) and the long interval is \(\varGamma_{1}^{l}: = [11,\infty)\). The initial state is assumed to be x T(0)x(0)<2 and the disturbance ω(k)=1/(k+1). Thus, the parameters can be ascertained as \(\delta = \sqrt{2}, d = 2, R = I, \mathcal{T}_{n} = 10\). Now the objective is to design a set of sub-filters ensuring the asymptotic stability of error dynamics and the value of J=γ 2+ε 2 should be minimized. By \(\mathcal{H}_{\infty}\) filter design algorithm for short-time switched system, the design procedure is given as follows:
Step 1 Initialize parameters \(\mu = 1, \Delta\mu = 0.02, \bar{\mu} = 0.6\).
Step 2 Solving optimization problem (20), find the values J min with different μ which is shown in Fig. 5.

The value of J min with different μ
It is shown that the minimal value of J min with \(\tilde{\mu} = 1.14\).
Step 3 Ascertain the local optimal value of J min=228.5382 with μ=1.1352 near \(\tilde{\mu} = 1.14\) by an unconstrained nonlinear optimization approach. The corresponding performance index and boundary are γ=8.4413,ε=12.5412. Finally we obtain the optimal finite-time filter \(\mathcal{F}_{1}\) in the short-time switching interval \(\varGamma_{1}^{s}\) as follows:

The simulation results in \(\varGamma_{1}^{s}\) are shown in the Fig. 6.

The value of \(\sqrt{\xi^{T}(k)R\xi (k)}\) in \(\varGamma_{1}^{s}\)
Explicitly, the finite-time boundedness with respect to bound ε=12.5412 is ensured by Fig. 6.
Step 4 Design \(\mathcal{H}_{\infty}\) asymptotic filter \(\mathcal{F}_{2}\) in \(\varGamma_{1}^{l}\) as

The system state x (denoted by solid line in Fig. 7), estimated state \(\hat{x}\) (denoted by dotted line in Fig. 7) and error output z e are shown in Figs. 7 and 8.

Error state response ξ(k)

Error output z e (k)
Obviously, the asymptotic stability of error dynamics is guaranteed by Fig. 7. Moreover, the performance is guaranteed since we have \(\sum_{k = 0}^{\infty} z_{e}^{T}(k)z_{e}(k) \approx \sum_{k = 0}^{100} z_{e}^{T}(k)z_{e}(k) = 13.4840\) and \(\gamma^{2}\sum_{k = 0}^{\infty} \omega^{T}(k)\omega(k) \approx116.5084\). Obviously, \(\sum_{k = 0}^{\infty} z_{e}^{T}(k)z_{e}(k) < \gamma^{2}\sum_{k = 0}^{\infty} \omega^{T}(k)\omega(k)\).
In this example, two classes of filters are involved, the filter \(\mathcal{F}_{1}\) which serves in short-time switching interval and guarantees the error state bounded in the prescribed boundary. As we observe, the finite-time filter \(\mathcal{F}_{1}\) alone cannot ensure the asymptotic stability of error dynamics because the optimal filter with minimal value of J min is obtained with parameter \(\mu = 1\mathrm{.1352 > 1}\). Hence the asymptotic filter \(\mathcal{F}_{2}\) is designed which will be activated during the relatively long interval to guarantee the asymptotic stability of error system.
Here we add some further comments on the simulation results of this example. At first, in the simulation results we see that the error state is bounded to the value ε=12.5412. Compared with Example 1, the advantage of our approach is obvious as the error state is successfully avoided to reach very large values caused by frequent switching behavior. On the other hand, another point of advantage in contrast to other observed design approach arises in this example. From Fig. 5 we see that we cannot find feasible solution for μ=1. This implies that the asymptotic filter cannot be designed by the switched Lyapunov function approach. As mentioned in Remark 1, our approach provides an alternative method to design filter ensuring both boundedness and asymptotic stability of error system. Thus, we can conclude that our approach not only solves the boundedness filtering problem for short-time switched system, but also presents a new way to ensure the convergence of error state when other methods such as common or switched Lyapunov function methodologies fail.
6 Conclusions
In this paper, the \(\mathcal{H}_{\infty}\) filtering problem for so-called short-time switched systems is addressed. Since the switching frequently occurs in some certain short time intervals and for the rest of the time no switching occurs, the designed filter is composed of two parts: asymptotic filter and finite-time boundedness filter. The finite-time boundedness filter is the main concern of our investigation in this paper. By introducing the concept of finite-time boundedness and based upon the analysis results of finite-time boundedness of switched system, an \(\mathcal{H}_{\infty}\) finite-time filter is proposed to ensures the error state to be bounded in a certain limit and retain the \(\mathcal{H}_{\infty}\) performance in the specific finite interval. At last, a numerical design example is given to illustrate the design procedure. Due to the common existence of short-time switching in many practical systems, our theoretical results have a potential to be extended into cases such as the time-varying and time-delay cases based on the recent results in [21–24, 33], and are meant to be widely used in practical control synthesis such as neural network systems, which will be further considered in future work.
References
F. Amato, M. Ariola, Finite-time control of discrete-time linear systems. IEEE Trans. Autom. Control 50(5), 724–729 (2005)
A. Balluchi, M.D. Benedetto, C. Pinello, C. Rossi, A. Sangiovanni-Vincentelli, Cut-off in engine control: a hybrid system approach, in Proceedings of the 36th IEEE Conference on Decision and Control (1997), pp. 4720–4725
B.E. Bishop, M.W. Spong, Control of redundant manipulators using logic-based switching, in Proceedings of the 36th IEEE Conference on Decision and Control (1998), pp. 16–18
M.S. Branicky, Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans. Autom. Control 43(4), 475–482 (1998)
B. Castillo–Toledo, S. Di Gennaro, A.G. Loukianov, J. Rivera, Hybrid control of induction motors via sampled closed representations. IEEE Trans. Ind. Electron. 55(10), 758–3771 (2008)
J. Daafouz, R. Riedinger, C. Iung, Stability analysis and control synthesis for switched systems: a switched Lyapunov function approach. IEEE Trans. Autom. Control 47(11), 1883–1887 (2002)
R.A. Decarlo, M.S. Branicky, S. Pettersson, B. Lennartson, Perspectives and results on the stability and stabilization of hybrid systems. Proc. IEEE 88(7), 1069–1082 (2000)
H. Dong, Z. Wang, H. Gao, Robust \(\mathcal{H}_{\infty}\) filtering for a class of nonlinear networked systems with multiple stochastic communication delays and packet dropouts. IEEE Trans. Signal Process. 58(4), 1957–1966 (2010)
H. Dong, Z. Wang, D.W.C. Ho, H. Gao, Variance-constrained \(\mathcal{H}_{\infty}\) filtering for nonlinear time-varying stochastic systems with multiple missing measurements: the finite-horizon case. IEEE Trans. Signal Process. 58(5), 2534–2543 (2010)
D. Du, B. Jiang, P. Shi, S. Zhou, \(\mathcal{H}_{\infty}\) filtering of discrete-time switched systems with state delays via switched Lyapunov function approach. IEEE Trans. Autom. Control 52(8), 1520–1524 (2007)
A. Elsayed, M. Grimble, A new approach to \(\mathcal{H}_{\infty}\) design for optimal digital linear filters. IMA J. Math. Control Inf. 6(3), 233–251 (1989)
H. Gao, T. Chen, \(\mathcal{H}_{\infty}\) estimation for uncertain systems with limited communication capacity. IEEE Trans. Autom. Control 52(11), 2070–2084 (2007)
J.P. Hespanha, D. Liberzon, A.S. Morse, Stability of switched systems with average dwell time, in Proceedings of 38th Conference on Decision and Control (1999), pp. 2655–2660
K. Hu, J. Yuan, Improved robust \(\mathcal{H}_{\infty}\) filtering for uncertain discrete-time switched systems. IET Control Theory Appl. 3(3), 315–324 (2009)
D. Koenig, B. Marx, \(\mathcal{H}_{\infty}\) filtering and state feedback control for discrete-time switched descriptor systems. IET Control Theory Appl. 3(6) 661–670 (2009)
I.V. Kolmanovsky, J. Sun, A multi-mode switching-based command tracking in network controlled systems with pointwise-in-time constraints and disturbance inputs, in Proceedings of 6th WCICA (2006), pp. 99–104
D.J. Leith, R.N. Shorten, W.E. Leithead, O. Mason, P. Curran, Issues in the design of switched linear control systems: a benchmark study. Int. J. Adapt. Control Signal Process. 17(2), 103–118 (2003)
D. Liberzon, Switching in Systems and Control (Birkhäuser, Boston, 2003)
D. Liberzon, A.S. Morse, Basic problems in stability and design of switched systems. IEEE Control Syst. Mag. 19(5), 59–70 (1999)
H. Lin, P.J. Antsaklis, Stability and stabilizability of switched linear systems: a survey of recent results. IEEE Trans. Autom. Control 54(2), 308–322 (2009)
M.S. Mahmoud, Switched Time-Delay Systems (Springer, Boston, 2010)
M.S. Mahmoud, Switched delay-dependent control policy for water-quality systems. IET Control Theory Appl. 3(12), 1599–1610 (2009)
M.S. Mahmoud, Delay-dependent dissipativity analysis and synthesis of switched delay systems. Int. J. Robust Nonlinear Control 21(1), 1–20 (2011)
M.S. Mahmoud, Y. Xia, Switched state feedback for uncertain continuous-time systems with interval-delays. Int. J. Robust Nonlinear Control 21(9), 1045–1065 (2011)
A.S. Morse, Supervisory control of families of linear set–point controllers, part 1: exact matching. IEEE Trans. Autom. Control 41(10), 413–1431 (1996)
K.S. Narendra, J.A. Balakrishnan, Common Lyapunov function for stable LTI systems with commuting A-matrices. IEEE Trans. Autom. Control 39(12), 2469–2471 (1994)
K.S. Narendra, O.A. Driollet, M. Feiler, K. George, Adaptive control using multiple models, switching and tuning. Int. J. Adapt. Control Signal Process. 17(2), 87–102 (2003)
P. Shi, M. Mahmoud, S. Nguang, Robust filtering for jumping systems with mode-dependent delays. Signal Process. 86(1), 140–152 (2006)
C. Sreekumar, V. Agarwal, A hybrid control algorithm for voltage regulation in DC–DC boost converter. IEEE Trans. Ind. Electron. 55(6), 2530–2538 (2008)
Z. Sun, S.S. Ge, Switched Linear Systems–Control and Design (Springer, London, 2005)
L. Wu, D.W.C. Ho, Reduced-order l 2–l ∞ filtering of switched nonlinear stochastic systems. IET Control Theory Appl. 3(5), 493–508 (2009)
L. Wu, J. Lam, Weighted \(\mathcal{H}_{\infty}\) filtering of switched systems with time-varying delay: average dwell time approach. Circuits Syst. Signal Process. 28(6), 1017–1036 (2009)
L. Wu, J. Lam, Sliding mode control of switched hybrid systems with time-varying delay. Int. J. Adapt. Control Signal Process. 22(10), 909–931 (2008)
L. Wu, P. Shi, H. Gao, C. Wang, \(\mathcal{H}_{\infty}\) filtering for 2D Markovian jump systems. Automatica 44(7), 1849–1858 (2008)
L. Wu, Z. Feng, W. Zheng, Exponential stability analysis for delayed neural network with switching parameters: average dwell time approach, IEEE Transactions on. Neural Netw. 21(9), 1396–1407 (2010)
W. Xiang, J. Xiao, \(\mathcal{H}_{\infty}\) filtering for switched nonlinear systems under asynchronous switching. Int. J. Syst. Sci. 42(5), 751–765 (2011)
W. Xiang, J. Xiao, \(\mathcal{H}_{\infty}\) finite-time control for switched nonlinear discrete-time systems with norm-bounded disturbance. J. Franklin Inst. 348(2), 331–352 (2011)
S. Xu, J. Lam, Y. Zou, \(\mathcal{H}_{\infty}\) filtering for singular systems. IEEE Trans. Autom. Control 48(12), 2217–2222 (2003)
G.S. Zhai, B. Hu, K. Yasuda, A.N. Michel, Stability analysis of switched systems with stable and unstable subsystems: an average dwell time approach, in Proceedings of the American Control Conference (2000), pp. 200–204
B. Zhang, S. Xu, Robust \(\mathcal{H}_{\infty}\) filtering for uncertain discrete piecewise time-delay systems. Int. J. Control 80(4), 636–645 (2007)
L. Zhang, C. Wang, L. Chen, Stability and stabilization of a class of multimode linear discrete-time systems with polytopic uncertainties. IEEE Trans. Ind. Electron. 56(9), 3684–3692 (2009)
W. Zhang, M.S. Branicky, S.M. Phillips, Stability of networked control systems. IEEE Control Syst. Mag. 21(1), 84–99 (2001)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (Nos. 51177137, 61134001). The authors would like to thank the associate editor and the reviewers for their helpful comments and suggestions which have helped improve the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Xiang, W., Xiao, J. & Iqbal, M.N. \(\mathcal{H}_{\infty}\) Filtering for Short-Time Switched Discrete-Time Linear Systems. Circuits Syst Signal Process 31, 1927–1949 (2012). https://doi.org/10.1007/s00034-012-9416-z
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-012-9416-z