
Abstract
In modern automobiles a lot of actuators are used to run safety systems. Nowadays these are mechanical, electromechanical, pneumatic, pyrotechnic or electromagnetic actuators. For releasing them electrical or mechanical energy is used. This paper presents a new class of actuators in safety systems using shape memory wires. They are able to replace the conventional actuators. The goal for this research work is to use shape memory elements in a clamping system of a steering column as well in safety as in comfort area. The shape memory elements control the opening and closing function that presses with maximum 5,000 N against the steering jacket. For the first prototype, called drum type, shape memory wires are used to open the system and disc springs are used for closing. The second prototype is a so-called lateral actuator, where shape memory elements are used for the opening and closing function. Tests with the drum prototype are carried out with up to 16 wires up to date. Each wire is preloaded with 50 N that corresponds to a compression of the disc springs of 800 N. When the wires are electrically activated they contract the disc springs until 1,200 N over a stroke of 1 mm. In this configuration an electrical power of 16 V and 56 A is used. The second prototype is designed with four wires of 0.5 mm diameter for closing and two wires for opening the clamping system. To open the clamping system in less than one second an electrical power of 7 A and 12 V is necessary, while 14 A and 12 V is needed to close it within 1.5 s. At the moment the application of the first prototype is restrained through an energy limitation, because the battery of modern automobiles would not be sufficiently adequate. Anyway, in the near future more electrical cars will be on the market and therefore this prototype can successfully be implemented. One of the advantages using shape memory alloys in the design of a steering column is its lightweight. Moreover it is possible to control the energy in any time because of the electrical activation and the control of the electrical resistance of the shape memory actuators. Thereby this actuator can be activated and the steering column can even be released in special crash situations in order to create enough space for the airbag and to avoid a possible touch of the body of the driver with the steering wheel.
F2012-E07-023
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
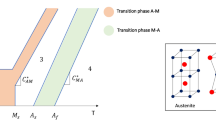
In spite of the increasing number of cars the number of injured or killed persons is constantly decreasing. This fact is a consequence of the increasing number of automotive safety devices and systems. The new cars have currently three types of safety systems: passive, pre-crash and active. In these safety systems shape memory alloys can act as actuators which even can respond in milliseconds. When these materials are heated the martensitic structure is changed into austenitic structure. During this phase transformation a shape memory actuator is able to contract, to bend or to rotate. The use of shape memory alloys as actuator material has some main advantages: they are smaller and easy to activate with the electrical source and therefore their use often reduces the complexity of the systems. Thereby weight and size of these systems also can be reduced.
1.1 Statistics in Europe About Accidents
During the time period of April 2012, the police recorded 249 deaths in road traffic in Germany; compared to the same month from last year, this number decreases with 27.2 %. The number of the injured persons also decreased with 18.3 % [1]. During the time period of 1990–2010 in Europe the number of injured persons in automotive accidents declined in the range of 8 % within this period to the total number of 242,700. In contrast in December 2010 the number of accidents without killed persons increased with 19 % to 247,800. The fatalities number decreased with 37 % and the injuries also decreased with 17 % comparable with December 2009. As we can see in the Fig. 1 the objective for 2020 is to reduce the fatalities [2]. In parallel with them it will be reduced the number of injured persons and accidents.

Evolution of fatalities in Europe [2]
In that idea EU-government searches solutions to reduce the number of accidents, deaths and injuries. The objective for 2010 was to save 25,000 lives. That means each part of a car which is used for the safety system should always be optimized. If you can anticipate the accident and if the safety systems are ready to act, you can better protect the occupant.
1.2 Statistics in China About Accidents
As a result of these dynamic changes in the economy, road transport infrastructure development and motorization, road traffic accidents have become a more severe problem in China. According to the annual report of the China Road Traffic Accident Statistics, the number of people who died from road traffic accidents in 2005 was 98,738, with the number of injured five times higher, and is believed to be underestimated in rural areas in China. This fatality number is about 20 % of the total traffic fatalities in the whole world each year, and the number of fatalities is expected to be even worse due to the rapidly increasing number of vehicles and novice drivers [3].
Conclusions of this statistics are that the safety systems should be updated continuously. The automotive industry should always search new device, new materiel which can perform this systems and protect better the driver.
2 Short Introduction About SMA
Shape memory alloys (SMA, smart metal, memory metal, memory alloy, muscle wire, smart alloy) are alloys that “remember” their original, cold-forged shape by returning to the pre-deformed shape by heating. This material is a lightweight, solid-state alternative to conventional actuators such as hydraulic, pneumatic, and motor-based systems. Shape memory alloys are finding applications in industries including medical and aerospace [4].
In the automotive industry they can replace electrical, thermal, hydraulic and magnetic actuators from different systems, like safety systems, clutch drive, folding and setting mirror, and others by showing additional advantages (Fig. 2).

Possibilities to use SMA in automotive systems [6]
3 Application of SMA in Steering Columns
3.1 Introduction to the Safety Steering Column
The main function of a steering column is to transfer the torque applied to the steering wheel by the driver via the steering shaft to the steering gear. Another important function is for crash safety. The steering column can collapse and absorb energy during the crash phase. Therefor is a crash element as well as a clamping system (3) required. The clamping system is holding the steering wheel for a reach and rake adjustable steering column in position with a clamping force between 3,000–5,000 N—depending on the steering column design respectively system. The clamping system can be opened manually by the lever. But the lever has a big disadvantage because its position could damage the knee during the crash. There is only one crash force set up due to the manually clamping system. That also can cover more or less only one specific crash situation. All the other crash situations at e.g. different speeds, different drivers weight are compromises [5].
This leads now to two important reasons to implement SMA system into the clamping systems of Steering Columns:
-
1.
Removing the lever can reduce knee accidents.
-
2.
Adjustable clamping force can lead to many different crash absorbing forces
3.2 Drum Prototype
The task of this application is to open the clamping system in less than 1 s. Actuator wires are used which can react in 1 s at 3,000–5,000 N. In order to guarantee 5,000 cycles the chosen NiTi wires are loaded with 400 N/mm2. The NiTi wires have an As-temperature higher than 80 °C and a diameter of 0.40 mm. Was tested also wires with diameter 0.44 and 0.5 mm (Fig. 3).

Drum prototype
Between the drums the disc spring is contracted at 5,000 N. The two drums are made from a special isolating material. SMA actuator wires are attached between the drums. By applying the system with electrical energy (e.g.: by pushing a button from the steering wheel), SMA wires (1) are contracted and the drum (3) will be pulled towards drum (2) and thereby the spring will be compressed.
The bracket part (blue one) will be free and the driver can adjust the position of the steering wheel (steering column). During the whole adjusting process the energy for the SMA wires is controlled; otherwise the wires would be overheated. In order to contract within 1 s the SMA wires need a lot of energy. When the electrical source is off the actuator wires will cool down, change into its martensitic phase and reset the whole system into the first position, because the disc spring will push drum (3) and also part of the bracket. In this case the steering column will be blocked in the desired position. So the clamping system is opened (or activated) with SMA actuator, this means with electrical energy, and is closed with disc springs, that means with mechanical energy.
The last test was made for 16 wires; each wire should develop a force higher than 50 N. In this case the disc springs are pretensioned at 800 N. After activation the final force is 1,200 N. The tests are made to 16 V electrical tension and 56 A, current intensity. To get this mechanical output (force, displacement vs. time) at least 3.5 A/wire is necessary. For 100 wires (see formula 2), 350 A it will be necessary. In this moment the electric battery of the cars are limited and the drum prototype could be assembled in this design. The next approach is to reduce the electrical energy by using fewer wires.
3.3 Lateral Actuator
The reaction of each safety system depends on the speed of the vehicle. So the new concept should allow activation times much faster than 1 s. The steering wheel incorporates the airbag system. So the reaction time of the airbag system is of importance for the new concept of the safety steering column. The activation of general airbag system takes place within maximum 60 ms. As a consequence the new concept of the clamping system also should be able to react within 60 ms in order to control the steering column during an accident. By means of this the airbag function could be considerably improved in order to react in the most appropriate way referred to the accident condition. But in a first step our group is focused on the mentioned reaction time of about 1 s in order to use the safety steering column for a comfortable adjustment of the steering column.
In this case we propose a second system which can open and close the steering column clamping at maximum 5,000 N (Ft) over 5,000 cycles within 1 s. In cooperation with the industrial partner 3D models are designed in the Material Testing Laboratory of the HTWG Konstanz and are shown in the next pictures (Fig. 4).

Lateral wire actuator
The bracket part (grey one from Fig. 5) was applied with a force of 5,000 N from the clamping system. In that second prototype the releasing arm of the steering column is slightly modified and SMA actuators wires are fixed directly to the arm of the clamping system.

Steering Column with steering shaft [5]
In this case SMA wires are used to open and also to close the clamping system. Electrical energy is used instead of manual energy. The system is more comfortable by pressing a button and then adjusting the steering column. When the source is “on” because of the activation of the button the wire (1—red one) pulls the arm until the clamping system will be opened. And when the button is released (“off”) a microcontroller will send electrical energy to the other wire (2—black one) in order to pull the arm into the other direction. In that way the clamping system is closed again. Electrical energy is used to open and close the clamping system (Fig. 6).

Arm cinematic
Open-close position is 30°, ~27 mm. The clamping system is closed by 8 Nm (Mt) torque (this value is given by the manufacturer and was verified in own tests).
Calculation for the SMA wires force:
The wire is able to contract in the range of 3–5 %, but only 3.5 % contraction is used in order to fulfill the requirements concerning the required life time cycles.
Because of this calculated wire lengths, they are conducted over different deflection pulleys (yellow). NiTi alloys with a diameter of 0.44 mm was used for these prototypes. In order to contract within 1 s the wire needs a considerable amount of energy. Last tests are made with 0.5 mm wires; two wires for opening and four wires for closing the system. Active length of the wires is 650 mm. In this configuration an electrical current of 3.5 A is used for each wire.
While in the first prototype electrical energy is only used to open the system, in the second prototype electrical energy is used for both actuations: to open and close the clamping system.
4 Conclusions
The main idea for this new system is to use SMA for comfort reasons to remove the lever of the clamping system and at the same time it could be used as a new crash safety system for steering columns. A further positive effect of removing the lever is that the possibility of knee inquiry is reduced. It is known the term “in position” and “out of position” for the head of driver and body in the crash phase. In this sense, the presented system could reduce the clamping force of the clamping system during a crash in order to find the best position of the drivers head “in position” (optimal position). Optimal position for head is to contact the airbag in the middle of the bag. In accordance with European and Asian regulations to reduce the injury of the driver, this system (lateral actuator) can be used in the passive safety system of the cars.
The present results show that the shape memory alloys can do a good job in this new automotive safety system.
Some advantages using SMA are:
-
Reduction of the manual force—it is comfortable, in this case the driver can always be careful at the traffic
-
Avoidance of noise in car
-
Miniaturization of the system compared to systems using classic actuators
-
Control of the contraction of the wires in every moment and therefore information concerning the status of the clamping mechanism.
References
http://www.dvr.de/site.aspx?url=html/betriebe_bg/daten/unfallstatistiken144.htm. Accessed on 13 July 2012
http://ec.europa.eu/transport/road_safety/specialist/statistics/trends/index_en.htm. Accessed on 13 July 2012
Zhao S (2009) Road traffic accidents in china. IATSS Res 33(2):125–127
Gümpel P et al (2004) Formgedächtnislegierungen. Expert verlag, Renningen, p 146, ISBN 3-8169-2293-7
Heitz T (2010) Analysis of using CFK-material for steering column components in passenger vehicles. Brasov, CONAT, pp 245–253
http://mercedes-benz-blog.blogspot.de/2010/03/new-mercedes-benz-e-class-cabriolet_6980.html. Accessed on 13 July 2012
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Gheorghita, V., Gümpel, P., Strittmatter, J., Anghel, C., Heitz, T., Senn, M. (2013). Using Shape Memory Alloys in Automotive Safety Systems. In: Proceedings of the FISITA 2012 World Automotive Congress. Lecture Notes in Electrical Engineering, vol 195. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33835-9_83
Download citation
DOI: https://doi.org/10.1007/978-3-642-33835-9_83
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33834-2
Online ISBN: 978-3-642-33835-9
eBook Packages: EngineeringEngineering (R0)