
Abstract
In the automotive industry a strong effort has been undertaken to reduce the weight of modern vehicles. In order to reduce the energy consumption and to improve the environmental sustainability, the importance of weight reduction activities is even growing faster. As lightweight designing is becoming more and more expensive and show less potential savings, new approaches are needed. One promising technology could be the use of shape memory elements. In the last years a lot of potential application possibilities were presented, demonstrating the benefit of these functional elements in automotive design solutions: they often reduce complexity, weight and design space of an actuation device and enable new functions. In addition they work silently and are therefore ideally suitable for comfort applications in the passenger cabin. Because of the current trend to electric vehicle the hitherto existing drawback of a high electrical energy consumption of shape memory actuators in some design proposals is not given any more.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
The shape memory effect was discovered for the first time in the year 1949 in some experiments upon CuZn- and CuAl-alloys [1]. In the following decades this phase change effect was further investigated and an extensive research work was carried out especially for the NiTi-alloy system [2–4]. Nowadays SMAs have become a wide field of research on the one hand and also part of an industrial market with real products and applications in different technical areas on the other hand. In the first place medical applications have to be mentioned, for example stents and guide wires [5, 6]. But also in the field of domestic appliance the number of household applications using shape memory elements is rapidly growing [7].
In the automotive industry, in contrast, some growing interest in these functional materials can be mentioned, but the activities were mostly limited upon pure research, patent filings and the development of some first demonstrators. The reasons for this restriction are complex and multilayered: for a long time construction algorithms and designing tools were missing, reliable material producers and suppliers were hard to find, the phase change temperatures were not high enough and the effect stability was sometimes too small. Working with shape memory elements very often was a time and cost intensive trial-and-error process. Fortunately a lot of these drawbacks have been overcome in the last years and therefore the automotive industry is more and more interested in the development of new applications, especially when SMAs are used as actuators.
Considering the automotive industry it can be asserted that in recent years a strong effort has been carried out to reduce the weight of modern vehicles. In order to reduce the energy consumption on the one side and to improve the environmental sustainability of any car on the other side, the importance of weight reduction activities is even growing faster. As lightweight designing is becoming more and more expensive and show less potential savings, new approaches are needed. One promising technology could be the use of shape memory elements. In the last years a lot of potential application possibilities were presented, demonstrating the benefit of these functional elements in automotive design solutions: they often reduce complexity of an actuation device and enable new functions, thereby they reduce the weight and the required space. In addition they work silently without any sound and are therefore ideally suitable for comfort applications in the passenger cabin of an automotive vehicle. Because of the current trend to electric vehicle the hitherto existing drawback of a high electrical energy consumption of shape memory actuators in some design proposals is not given any more.
Although the SMAs are described in a multitude of papers and books, this paper gives a short overview of commercially available SMAs, explaining the unusual behavior, the fundamental material mechanisms and the limitations of its use in automotive applications. In the second part of the paper diverse examples are given to demonstrate the benefit of shape memory driven automotive devices, some of them developed by the authors.
2 State of Art of Shape Memory Alloys
2.1 Physical Effects and Fundamental Material Mechanisms
The most important property of SMAs is the reversible change of its shape by means of thermal influences or interactions with external mechanical stress. During this change of shape very high resetting forces may occur, for which reason this material is considered to be very interesting for a lot of different applications. The shape memory effect is based upon a reversible and diffusionless phase change between a high temperature phase called austenite and a low temperature phase called martensite. By means of an appropriate change of temperature or mechanical stress this lattice structure may be provoked. This change of shape or phase change, respectively, occurs in the solid state, far below the melting temperature of the alloy. The phase change of SMAs is showing a hysteresis and is generally characterized by four so-called phase change temperatures. In the case of the austenitization these are the austenite-start-temperature, AS, and the austenite-finish-temperature, AF. For the building of the martensite structure two temperatures are used: the martensite-start-temperature, MS, and the martensite-finish-temperature, MF. Figure 1 shows schematically this hysteresis during the phase change of shape memory materials.

(Source: Liu [8])
Hysteresis and phase change of a shape memory material
The reversible change of shape provoked by the shape memory effect may occur in different forms, which are generally named as:
-
one way shape memory effect (OWSME)
-
two way shape memory effect (TWSME)
-
pseudo-elasticity (PE) or super-elasticity (SE)
Generally every SMA is able to conduct every mentioned shape memory effect; which type of shape memory effect is executed depends upon the material, its production and its thermomechanical treatment and is reliant on the temperature, deformation and the mechanical stress [9].
One Way Shape Memory Effect (OWSME).
The OWSME describes the ability of a SMA that was deformed in the martensite condition to reset this deformation (shape change) only by heating. The percentage of this reversible deformation can be represented up to 8 % [3].
Figure 2 shows as a practical example for the OWSME a wire or a clamp that consists of shape memory material. First the clamp will be deformed by applying an external force. Afterwards the clamp will be heated and the original shape will be restored. A further cooling will not cause any visible change of shape.

Principle of the one way effect (OWSME)
This effect of a reverse transformation into the original shape by means of the austenitization only occurs after a previous deformation in the martensite condition and is therefore called OWSME. Colloquially it can be said that the SMA “remembers” its original shape in the high temperature phase (austenite). The phase change from austenite to martensite does not change the shape.
Figure 3 shows the course of mechanical stress (σ), temperature (T) and elongation (ε) during the OWSME. At the beginning the SMA is in the martensite condition, no mechanical stress is applied and therefore no elongation can be observed. When the SMA is mechanically loaded first an elastic area is run through, where the mechanical stress rises at low elongation. This area of elastic elongation is followed by an area where the elongation rises at nearly constant mechanical stress. This area is the martensite plateau, where a SMA can be pseudo-plastically elongated. A further loading after this reversible area would cause real-plastically deformation till fracture [8]. If the SMA is unloaded within the pseudo-plastic area, a certain elongation remains (ε1W). If a SMA in this condition is heated, the elongation returns back to zero.

(Source: Liu [8])
One way effect (OWSME or also ε1W)
Two Way Shape Memory Effect (TWSME).
SMAs with a TWSME are able to “remember” two shapes: one in the austenite at high temperature (in the same way as the OWSME) and additionally another shape at lower temperature and martensite structure. The percentage of reversible deformation of the TWSME is lower compared to the OWSME and can be represented up to 4 % in the case of NiTi alloys [3].
The shape in the lower temperature condition has to be adjusted by thermomechanical treatments. No new mechanical stress is necessary to change between these two shapes: the shape of the high temperature condition is formed by means of the austenitization and the shape of the low temperature condition by means of the martensitization. The full effect is achieved when heated to the austenite-finish-temperature and when cooled to the martensite-finish-temperature, respectively (see Fig. 4).

(Source: Liu [8])
Two way effect (TWSME or also ε2 W)
According to [10] the TWSME may occur extrinsically or intrinsically:
-
An extrinsic TWSME effect is defined if a force that deforms the actuator element in the cold condition is integrated into the setup
-
An intrinsic TWSME effect is defined if the shape memory element is able to change (“switch”) between the two shapes only by changing its temperature
Pseudo-Elasticity (PE) or Super-Elasticity (SE).
PE describes a mechanical SME where the alloy exhibits a “rubber-like” behavior. By application of an external force a reversible shape change can be observed that overpasses the reversible shape change of conventional spring steels up to ten times and can be practiced up to 8 % [3].
The reason for this effect is based upon a mechanically enforced phase change within the material. For this purpose the material has to present 100 % austenite in the beginning of the loading. Through the mechanical loading stress-induced martensite is formed at a critical stress level. Subsequent unloading causes a reverse transformation into the initial austenite structure (see Fig. 5).

(Source: Liu [8])
Pseudo-elasticity or super-elasticity (PE, SE or also εPE, εSE)
The pseudo-elastic effect only occurs at temperatures between the austenite-finish-temperature, AF, and the martensite-desist-temperature, Md. Md represents the upper limit for the formation of stress-induced martensite. At higher temperatures the austenite structure remains in a stable condition without formation of stress-induced martensite [11].
2.2 Available Alloys: Characteristics and Limitations
The thermal SME was observed in noble metal, Cu-, Fe- and NiTi-based alloy systems and in non-metal shape memory materials [12]. It can be said that with the availability of the NiTi alloys, discovered around 1960 in the Naval Ordnance Laboratory (NOL) and therefore called “nitinol”, the commercial use of the shape memory effect has started. Nowadays the NiTi- and Cu-based alloy systems are mainly used and present the highest availability. Although an increasing interest and development of Fe-based SMAs can be observed within the last years, Table 1 shows the most important properties of NiTi-, CuZnAl- and CuAlNi-SMAs.
In most of the applications NiTi-alloys are used because of their advantageous combination of the material properties. They exhibit the highest values of OWSME and TWSME, the best effect stability, the smallest risk of overheating, excellent corrosion resistance and biocompatibility and moreover a very high specific electrical resistivity [12]. The most important disadvantage seems to be their high price level.
2.3 Potential Capabilities for SMAs in Automotive Applications
Concerning the application of SMAs in automotive vehicles the use of actuator elements seems to be most promising. Practical examples are being presented in the next chapter. Table 2 shows the general advantages and disadvantages using NiTi-SMAs as actuators.
In addition to the design of classical shape memory actuator elements in automotive vehicles it is also possible to use SMAs as crash elements, utilizing the energy dissipating property during the phase change [13]. Based on the different electrical resistivity of the austenite and stress-induced martensite structure the application of SMAs as sensor elements is possible as well.
3 Examples for the Use of SMA in Automotive Devices
3.1 Overview of Potential Applications
Figure 6 shows an overview of potential applications of SMAs in car systems. Several of them are still under development; some of them are even shown in certain demonstrators [14]. One application that already passed to a standard-production application in luxury class vehicles of some car manufacturers is presented in the next chapter.

(Source: Mercedes-Benz)
Overview of potential applications of SMAs in car systems
3.2 First Serial Automotive Application: SMA Pneumatic Valves for Lumbar Support in Car’s Seats
The first high-volume product (>5 Mio actuators/year) is an automotive valve used to control low pressure pneumatic bladders in a car seat that adjust the contour of the lumbar support/bolsters. The overall benefits of SMA compared to traditionally-used solenoids in this car seat application (e.g.: lower noise, electromagnetic compatibility, lightweight, required space, power efficiency/consumption) are the crucial factors in the decision to replace the old standard technology with SMA [15].
According to a big SMA manufacturer [16] the SMA actuators are a perfect fit for valves because the micron thin SMA wire allows for numerous valve form factors enabling various options for attachment. In addition, the included proportional control (without any additional sensor) is the most suitable option for every valve supplier [16]. The silent and minimalistic design specification of the SMA air and gas valves offers benefits for a wide use in the automotive industry. This has contributed to winning significant production volume in the automotive sector [17]. This actuator is designed to fit into a customized valve or valve block offering 2 × 2/2 way, replacing two single magnets that would have to be used otherwise (see Fig. 7). Some of the impressive actuator characteristics [18] are listed below: Voltage: 9–16 V; Temperature: −40°C–80°C; Stroke: 0,4 mm; Closing force: 0,8 N; Full open/close < 120 ms; Weight < 20 g; Noise < 25 dBa.

One of the leading SMA companies is producing every year 10 million of these SM actuators that are installed in all main vehicles’ platforms of Daimler, BMW, GM, Hyundai, Ford and Porsche/VW [19].
3.3 Further Potential Applications
The Konstanz University of Applied Sciences and the WITg are working in the field of SMAs for more than 20 years and various automotive applications were investigated, some of them still are under development. In these applications a strong focus was set to quick changing actuators in order to use NiTi wires in automotive pedestrian safety systems [20, 21]. Another field of activity is located in the energy dissipation of a crash impulse by means of shape memory elements [22]. Recently the authors are working upon new automotive systems with SMAs that can be used on the one side for comfort tasks in the passenger cabin and on the other side also for crash situations, presenting new functions in order to prepare the passengers to the particular accident situation [23]. In the Conference up-to-date information of these projects will be given; for lack of space in this paper only one actuator type for automotive applications will be presented.
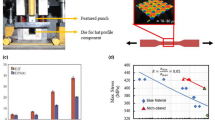
In some applications, the stroke of a SMA based on the two way effect is not sufficient. Due to this, a structure has been developed, in which stroke as well as lifting force are variably expandable. The function to a specific installation length to increase the stroke of one or more SMA actuators is realized with a linear mechanical cascading mechanism. This is based on a connection of the actuator elements with the superposed cascade element on which in turn are mounted further SMA actuators. For the desired contraction the number of levels of the cascade serves as summation of each stroke path. Depending on the lifting capacity required, the number of used SMA wires can be increased or a larger cross-section could be used. Figure 8 shows the first prototype on the left side and its further development on the right side.

Cascade systems for SMAs (left: first design, right: further developed design)
Continue setting options with respect to the movement can be achieved by the connection of the electrical activation. With a series circuit of each layer the cascade performs a slow and uniform motion. In contrast to this, with a parallel circuit it results a rapid contraction.
4 Summary and Outlook
In the automotive industry a strong effort has been undertaken to reduce the weight of modern vehicles. In order to reduce the energy consumption and to improve the environmental sustainability, the importance of weight reduction activities is even growing faster. As lightweight designing is becoming more and more expensive and show less potential savings, new approaches are needed. One promising technology could be the use of shape memory elements. In the last years a lot of potential application possibilities were presented, demonstrating the benefit of these functional elements in automotive design solutions: they often reduce complexity, weight and required space of an actuation device and enable new functions. In addition they work silently and are therefore ideally suitable for comfort applications in the passenger cabin. Because of the current trend to electric vehicle the hitherto existing drawback of a high electrical energy consumption of shape memory actuators in some design proposals is not given any more.
References
Lagoudas, D.C.: Shape Memory Alloys – Modeling and Engineering Applications. Springer (2008)
Saburi, T.: Shape memory materials. In: Proceedings of the International Symposium SMM99, Kanazawa, Japan (2000). Trans Tech Publications Ltd.
Gümpel, P., Gläser, S., Jost, N., Mertmann, M., Seitz, N., Strittmatter, J.: Formgedächtnislegierungen – Einsatzmöglichkeiten in Maschinenbau, Medizintechnik und Aktuatorik; Band 655, expert Verlag Renningen 2. Aufl (2016)
Otzuka, K., Wayman, C.M: Shape Memory Materials. University Press, Cambridge (1999)
Duerig, T.M.: An overview of nitinol medical applications. Mater. Sci. Eng. A(273–275), 149–160 (1999)
Morgan, N.B.: Medical shape memory alloy applications — The market and its products. Mater. Sci. Eng. 378, 16–23 (2004)
Furukawa Techno Material Co., Ltd. https://www.furukawa-ftm.com/english/nt-e/appli/juutaku.htm
Liu, Y.: Formgedächtnis – Mikroventile mit hoher Energiedichte. Universität Karlsruhe, Dissertation (2003)
Fink, R.: Superelastische Formgedächtnislegierung als Sensorelement. HTWG Konstanz, Master’s Thesis (2004)
Büttgenbach, S.: Mikrosystemtechnik. Institut für Mikrotechnik, Technische Universität Braunschweig (2008)
Stoeckel, D., Yu, W.: Superelastic NiTi Wire. Wire J. Int., 45–50 (1991). presented at the 60th Annual Convention of the Wire Association International, Boston, MA, October 1990
Janocha, H.: Aktoren mit thermischen Formgedächtnis-Legierungen. In: Janocha, H.: Unkonventionelle Aktoren – Eine Einführung, Oldenbourg Wissenschaftsverlag GmbH, München 2. Aufl., pp. 155–173 (2013)
Clipa, V., Gheroghita, V., Gümpel, P., Strittmatter, J.: Characterization of NiTi shape memory damping elements designed for automotive safety systems. J. Mater. Eng. Perform. 23(5), 2696–2703 (2014). Springer
Butera, F.: Shape memory actuators for automotive applications. In: Auricchio, F. (eds.) Shape Memory Alloys, Advances in Modelling and Applications, International Center of Numerical Methods in Engineering CIMNE, Barcelona, Spain, pp. 405–426 (2001)
Shape-memory alloy, Wikipedia: https://en.wikipedia.org/wiki/Shape-memory_alloy
Actuator Solutions GmbH. http://www.actuatorsolutions.de/products/valves/
Actuator Solutions GmbH. http://www.actuatorsolutions.de/products/valves/air-gas/
Actuator Solutions GmbH. http://www.actuatorsolutions.de/products/valves/air-gas/33-actuator/
Butera, F.: SMAs for Industrial Applications – From first NiTiNOL to a Big Success, https://www.saesgetters.com/sites/default/files/Presentation%20by%20F.%20Butera%20SAES%20Group.pdf
Gläser, S., Gümpel, P., Kilpert, H., Strittmatter, J.: Quick changing actuators for safety systems in automobiles. In: Proceedings of the 10th International Congress on Automotive and Future Technologies CONAT 2004, Braşov, Romania (2004)
Chiru, A., Gheroghita, V., Gümpel, P., Strittmatter, J.: Future applications of Ni-Ti alloys in automotive safety systems. IJAT 15(3), 469–474 (2014)
Gheorghita, V., Strittmatter, J., Gümpel, P., Akarasanon, P.: New Testing machine for measuring the damping properties of shape memory wires in dynamic conditions, Annals of Faculty Engineering Hunedoara. Int. J. Eng. Fascicule 2, 119–122 (2013). Tome XI
Gheorghita, V., Guempel, P., Ceron, A.E., Strittmatter, J.: shape memory alloy actuators in steering columns. In: Proceedings of the XXVI microCAD International Scientific Conference, Miskolc, Hungary (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Strittmatter, J., Gümpel, P., Lattner, O. (2017). Potential Capabilities of Shape Memory Driven Automotive Devices. In: Chiru, A., Ispas, N. (eds) CONAT 2016 International Congress of Automotive and Transport Engineering. CONAT 2016. Springer, Cham. https://doi.org/10.1007/978-3-319-45447-4_59
Download citation
DOI: https://doi.org/10.1007/978-3-319-45447-4_59
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45446-7
Online ISBN: 978-3-319-45447-4
eBook Packages: EngineeringEngineering (R0)