
Abstract
This paper investigates the adaptive synchronization of nonlinear complex dynamical networks with time-delays and sampled-data by proposing a new adaptive strategy to coupling strengths and feedback gains. According to Lyapunov theorem, it is testified that the agents of sub-groups can converge those synchronous states respectively under some special conditions. In addition, some simulations are proposed to illustrate the theoretical results.
This work was supported in part by the National Natural Science Foundation of China Grant (No. 61773023), 2018 Beijing Education Commission Basic Science Research Expenses Project, “The-Great-Wall-Scholar” Candidate Training Plan of NCUT (XN070006), Construction Plan for Innovative Research Team of NCUT (XN018010), “Yu Xiu” Talents of NCUT.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Synchronization is a ubiquitous phenomenon in nature, such as the consistency of fireflies twinkling, Synchronized chirping of crickets and Synchronization of beating rhythm of cardiac myocytes. In recent years, the synchronization problems of nonlinear complex dynamical networks have attracted great attention and emerged a good deal of excellent works [1,2,3,4].
Synchronous methods of complex networks have emerged as the times require, and one of the most significant methods is to design advisable adaptive strategies for the relevant parameters, such as the coupling strengths and the feedback gains [3,4,5,6,7,8]. In [5], adaptive synchronization of complex dynamical networks was studied. Liu et al. [7] studied the adaptive synchronization of complex dynamical networks governed by local Lipschitz nonlinearlity on switching topology. For nonlinear complex dynamics networks, information interaction between agents can be considered as sampled information [9,10,11,12]. In [9], the author gave the necessary and sufficient conditions for solving consensus problems of double-integrator dynamics via sampled control and group synchronization of nonlinear complex dynamics networks with sampled data was investigated in [11]. However, time-delay is widespread in communication information among agents in real life [1,2,3, 5, 10]. Sampled-data based consensus of continuous-time multi-agent systems with time-varying topology was studied in [10]. The authors divided the whole group into some sub-groups to research those synchronization, that is group synchronization [11,12,13,14]. In [13], the authors considered the group synchronization of complex network with nonlinear dynamics via pinning control.
Inspired by these literatures, we will consider the adaptive synchronization of nonlinear complex dynamical network with time-delays and sampled-data in this paper. The contribution of this paper are twofold. We first design effective adaptive strategies for the coupling strengths and the feedback gains, and present a stability analysis of adaptive synchronization of networks with time-delays and sampled-data. The second contribution is that the influence of adaptive strategies, time-delay and coupling on synchronization of nonlinear complex dynamical networks are considered.
An outline of this paper is organized as follows. Section 2 declares the model of nonlinear complex dynamics network and gives some preliminaries. In Sect. 3, we study the adaptive synchronization of nonlinear complex dynamics network with time-delays and sampled-data. The simulation results are presented in Sect. 4. Finally, Sect. 5 concludes this paper.
2 Model and Preliminaries
Consider a complex dynamical network of \(N+M\) nodes with time-delays and sampled-data described by:
where \(x_{i}(t)=(x_{i1}(t),x_{i2}(t),\cdots ,x_{in}(t))^{T}\in R^{n}\) denotes position vectors of the node i at time t, \(f(\cdot )\in R^{n}\) describes the intrinsic dynamics of network and it is continuously differentiable, \(c_{ij}(t_{k}),d_{ij}(t_{k})\) represent the coupling strengths, and \(\tau (t_{k})\) denotes time-varying delays in transmission process. In this network, \(\ell _1=1,2,\cdots ,N,~\ell _2=N+1,N+2,\cdots ,N+M,\) and \(X_{1}=\{{x_{i}|i\in \ell _1}\},~X_{2}=\{{x_{i}|i\in \ell _2}\}.\) \(\mathscr {N}_{i}\) is the neighbor of node i, \(\mathscr {N}_{i}\in \mathscr {N}_{1i}\cup \mathscr {N}_{2i},\) where  If node i can get information from node j in the same group, then \(a_{ij}>0;\) otherwise \(a_{ij}=0;\) If node i can get information from node j between different groups, then \(b_{ij}\ne 0;\) otherwise \(b_{ij}=0.\) Thus the coupled matrix \(A\in R^{(N+M)\times (N+M)}\) can be written as
If node i can get information from node j in the same group, then \(a_{ij}>0;\) otherwise \(a_{ij}=0;\) If node i can get information from node j between different groups, then \(b_{ij}\ne 0;\) otherwise \(b_{ij}=0.\) Thus the coupled matrix \(A\in R^{(N+M)\times (N+M)}\) can be written as
where let \(S_{i}\triangleq a_{i1}+a_{i2}+\ldots +a_{iN},\) then \(A_{11} = \begin{bmatrix} a_{11}-S_{1}&{}\ldots &{} a_{1N}\\ \vdots &{} \ddots &{} \vdots \\ a_{N1}&{} \ldots &{} a_{NN}-S_{N}\\ \end{bmatrix}_{N\times N},\) and
represent the coupling configuration of the subgroups, respectively.
In system (1), the controller is
where \(\bar{x}_1(t),~\bar{x}_2(t)\in R^{n}\) are the synchronous states, \(h_{i}\) is an on-off control. If the system is sampled date, then \(h_{i}=1;\) otherwise \(h_{i}=0.\)
The adaptive strategies on coupling strengths and feedback gains designed as:
where \({c}_{ij}\ge 0,~{c}_{i}\ge 0,\) the constants \({k}_{ij}> 0\) and \({k}_{i}> 0\) are the weights of the \({c}_{ij}(t)\) and \({c}_{i}(t),\) respectively.
In the following, we will analyze the sampling period, which is an important factor in the sampling information. Given a positive real number \(\alpha \) and a sample periodic T, we suppose that (see [12] in more detail)
where \(t_{0}<t_{1}<\cdots \) are the discrete times; the node j can obtain information from its neighbors and positive integer \(T_{i}\) is a sampled time about the ith time \((\forall i=0,1,2,\cdots )\) satisfying \(T_{i}\le T.\) Under this condition, a linear consensus protocol based on a linear estimation-based sampling period is designed as follows:
Substituting system (4) into system (1), and let \(h=0,1,\cdots ,T_{k}-1,\) we can have
In order to solve the synchronization problem, we give the following assumptions and lemmas.
Assumption 1
[11]. There exist nonnegative constants \(\rho _{1}\) and \(\rho _{2}\) such that
Assumption 2
The coupling strengths and feedback gains are bounded, which means that
Definition 1
Network is said to group synchronization if
Lemma 1
[3]. Suppose that \(x,y \in R^{n}\) are vectors, and in matrix M, the following inequality holds:
Lemma 2
[5]. For any real differentiable vector function \(x(t)\in R^{n}\) and any \(n\times n\) constant matrix \(W=W^{T}>0,\) we have the following inequality:
where \(0\le \tau (t)\le \tau .\)
Lemma 3
[9]. If matrix \(A=(a_{ij})\in R^{N\times N}\) is the symmetric irreducible matrix, where \(a_{ii}=-\sum \limits _{j=1,j\ne i}^{N}a_{ij}\), then all eigenvalues of matrix \(A-E\) are negative numbers, where matrix \(E=diag(e,0,\cdots ,0)\) with \(e>0\).
3 Main Results
In this section, we consider adaptive synchronization of nonlinear complex dynamics network with time-delays and sampled-data. We have the following theorems.
Theorem 1
Under Assumptions 1–2 and Lemmas 1–3, if coupled matrix \(A_{11},A_{22}\) are the symmetric irreducible matrices, suppose that topology graph of system (1) is connected and the time-delays are bound, then system (1) can be steered to the synchronous state \(\bar{x}_{1}(t)\) and \(\bar{x}_{2}(t)\) by the adaptive strategies (3).
Proof
Define
then
Construct a Lyapunov function as follow:
where
Differentiating \(V_{1}(t_{k}),\) we can know
Under Assumption 1 and using Lemma 1, we can have
As a result of \(h=0,1,\cdots ,T_{k}-1<T,\) and Assumption 2, we can get
Using the Leibniz-Newton formula:
we can get that
Using Lemma 1, we can have
Thus,
Similarly, differentiating \(V_{2}(t_{k}),\) we can have
Differentiating \(V_{3}(t_{k}),\) we get
Count up \(\dot{V}_{1}(t_{k}),~\dot{V}_{2}(t_{k}),~\dot{V}_{3}(t_{k}),\) we know that
where \(\lambda _{1},~\lambda _{2}\) are the minimum eigenvalue of \(A_{11}-H_{1},~A_{22}-H_{2},\) respectively, with
From the conditions of Theorem 1, we known that the matrix \(H_{1},H_{2}\) are diagonal matrices with at least one element equaling to 1. Since \(A_{11},A_{22}\) are symmetric, all eigenvalues of \(A_{11}-H_{1},~A_{22}-H_{2}\) are negative from Lemma 3. So \(\lambda _{1}<0,~\lambda _{2}<0\) and \(p>0\) is sufficiently large, therefore, \(\dot{V}(t_{k})<0,\) all the nodes of system (1) with time-delays and sampled-data can converge to their own synchronous states asymptotically. The proof is completed.
Theorem 1 shows that when coupled matrix \(A_{11},A_{22}\) are the symmetric irreducible matrices, system (1) can synchronize. If coupled matrix \(A_{11},A_{22}\) are the asymmetric irreducible matrices, the synchronization of the system (1) is given by the following result.
Theorem 2
Under Assumptions 1–2 and Lemmas 1–3, if coupled matrix \(A_{11},A_{22}\) are the asymmetric irreducible matrices, suppose that system (1) is connected and the time-delays are bound, then system (1) is steered to the synchronous state \(\bar{x}_{1}(t)\) and \(\bar{x}_{2}(t)\) by the adaptive strategies (3).
Proof
Similarly,
Define the same Lyapunov function as Theorem 1, we can obtain
where \(\lambda _{1},~\lambda _{2}\) are the minimum eigenvalue of \(\frac{A_{11}+A_{11}^{T}}{2}-H_{1},~\frac{A_{22}+A_{22}^{T}}{2}-H_{2},\) respectively, with \(H_{1} = diag\{h_{i}\}~~\forall i\in \ell _1,~~~~H_{2} = diag\{h_{i}\}~~\forall i\in \ell _2.\)
Even though matrix \(A_{11},A_{22}\) are asymmetric, matrix \(\frac{A_{11}+A_{11}^{T}}{2},\frac{A_{22}+A_{22}^{T}}{2}\) are symmetric, thus, all eigenvalues of \(\frac{A_{11}+A_{11}^{T}}{2}-H_{1},~~\frac{A_{22}+A_{22}^{T}}{2}-H_{2}\) are negative from Lemma 3. So \(\lambda _{1}<0,~\lambda _{2}<0\) and \(p>0\) is sufficiently large, therefore, \(\dot{V}(t_{k})<0.\) Similar to Theorem 1, all the nodes of system (1) with time-delays and sampled-data can converge to their own synchronous states asymptotically. The proof is completed.
4 Simulations
Consider a complex dynamical network with \(N+M\) nodes, where \(N=3,~M=3\). Let the initial value of the 6 nodes is \(X(0)=[29~12~20~17~25~-7~22~9],\) the initial values of the coupling strengths and the feedback gains are \(c_{ij}(0)=d_{ij}(0)=c_{i}(0)=0.01.\)
Take \({A}_{11},~{A}_{22}\) be symmetric as
and \({A}_{11},~{A}_{22}\) be asymmetric as,
respectively.
Take \({B}_{12}=\left[ \begin{array}{ccc} 0 &{} 1 &{} 0 \\ 2 &{} 0 &{} 0 \\ 0 &{} 0 &{} 0.5 \\ \end{array}\right] *0.1\) and \({B}_{21}=\left[ \begin{array}{ccc} 1 &{} 2 &{} 0 \\ 0 &{} 0 &{} 0 \\ 0 &{} 0 &{} 0 \\ \end{array}\right] *0.1.\)
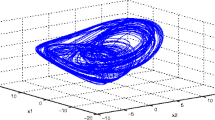
Figures 1 and 2 present that the effects of adaptive strategies for the synchronization of nonlinear complex dynamical networks. Figure 1 shows the simulation results on the synchronization of system (1) without adaptive strategies, where coupling matrices of sub-groups are symmetric. Figure 2 shows the simulation results on the adaptive synchronization of system (1) with \(\tau =0.2\), where coupling matrices of sub-groups are symmetric. Figures 2 and 3 show the simulation results on the group synchronization of system (1) with \(\tau =0.2\) and \(\tau =0.6\), where coupling matrices of sub-groups are symmetric as Figs. 2 and 3, respectively. From Figs. 2 and 3, we can see that all nodes of system achieve synchronization and the coupling strengths and the feedback gains also tend to be consistent. Figures 3 and 4 show the simulation results on the group synchronization of system (1) with \(\tau =0.6\), where coupling matrices of sub-groups are symmetric or symmetric presented as Figs. 3 and 4, respectively. Similarly, all nodes of system achieve synchronization and the coupling strengths and the feedback gains also tend to be consistent.

Without adaptive strategies and time delay \(\tau =0.2\) when intra-group coupling matrix is symmetric.

Intra-group coupling matrix is symmetric and time delay \(\tau =0.2.\)

Intra-group coupling matrix is symmetric and time delay \(\tau =0.6.\)

Intra-group coupling matrix is asymmetric and time delay \(\tau =0.6.\)
5 Conclusion
In this paper, we have studied the adaptive synchronization of nonlinear complex dynamical networks with time-delays and sampled-data. Whether the coupled matrix \(A_{11},A_{22}\) are symmetric or not, we have obtained the sufficient conditions satisfying the local Lipschitz condition.
References
Wang, S., Yao, H., Zheng, S., Xie, Y.: A novel criterion for cluster synchronization of complex dynamical networks with coupling time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 17(7), 2997–3004 (2012)
Liu, B., Su, H., Li, R., Sun, D., Hu, W.: Switching controllability of discrete-time multi-agent systems with multiple leaders and time-delays. Appl. Math. Comput. 228(9), 571–588 (2014)
Liu, B., Li, S., Wang, L.: Adaptive synchronization of two time-varying delay nonlinear coupled networks. In: Proceedings of the 33rd Chinese Control Conference, pp. 3800–3804. IEEE (2014)
Xu, Q., Zhuang, S., Zeng, Y., Xiao, J.: Decentralized adaptive strategies for synchronization of fractional-order complex networks. IEEE/CAA J. Autom. Sin. 4(3), 543–550 (2017)
Liu, B., Wang, X., Su, H., Zhou, H., Shi, Y., Li, R.: Adaptive synchronization of complex dynamical networks with time varying delays. Circuits Syst. Signal Process. 33(4), 1173–1188 (2014)
Du, L., Yang, Y., Lei, Y.: Synchronization in a fractional-order dynamic network with uncertain parameters using an adaptive control strategy. Appl. Math. Mech. (Engl. Ed.) 39(3), 353–364 (2018)
Liu, B., Wang, X.L., Gao, Y.P., Xie, G.M., Su, H.S.: Adaptive synchronization of complex dynamical networks governed by local Lipschitz nonlinearlity on switching topology. J. Appl. Math. 2013(1), 1–7 (2013)
Ding, D.W., Yan, J., Wang, N., Liang, D.: Adaptive synchronization of fractional order complex-variable dynamical networks via pinning control. Commun. Theor. Phys. 68(9), 366–374 (2017)
Gao, Y., Wang, L.: Consensus of multiple dynamic agents with sampled information. IET Control Theory Appl. 4(6), 945–956 (2010)
Gao, Y., Wang, L.: Sampled-data based consensus of continuous-time multi-agent systems with time-varying topology. IEEE Trans. Autom. Control 56(5), 1226–1231 (2011)
Li, M., Liu, B., Zhu, Y.Q.: Group synchronization of nonlinear complex dynamics networks with sampled date. Hindawi Publ. Corp. Math. Probl. Eng. 2014(6), 1–8 (2014)
Yu, Y.J., Yu, M., Hu, J.P., Liu, B.: Group consensus of multi agent systems with sampled data. In: Proceedings of the 32nd Chinese Control Conference, pp. 7168–7172. IEEE (2013)
Liu, B., Wei, P.E., Wang, X.F.: Group synchronization of complex network with nonlinear dynamics via pinning control. In: Proceedings of the 32nd Chinese Control Conference, pp. 235–240. IEEE (2013)
Yu, J., Wang, L.: Group consensus of multi-agent systems with directed information exchange. Int. J. Syst. Sci. 43(2), 334–348 (2012)
Tang, Z., Huang, T., Shao, J., Hu, J.: Consensus of second-order multi-agent systems with nonuniform time-varying delays. Neurocomputing 97(1), 410–414 (2012)
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bai, J., Xu, N., Ping, Y., Lu, X. (2020). Adaptive Synchronization of Nonlinear Complex Dynamical Networks with Time-Delays and Sampled-Data. In: Pan, L., Liang, J., Qu, B. (eds) Bio-inspired Computing: Theories and Applications. BIC-TA 2019. Communications in Computer and Information Science, vol 1160. Springer, Singapore. https://doi.org/10.1007/978-981-15-3415-7_4
Download citation
DOI: https://doi.org/10.1007/978-981-15-3415-7_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-3414-0
Online ISBN: 978-981-15-3415-7
eBook Packages: Computer ScienceComputer Science (R0)