
Abstract
A novel adaptive synchronization scheme for complex network with time-varying delay and delay coupling is proposed in this paper. Based on Lyapunov stability theory, a linear adaptive controller is designed which can be used in the future practical engineering. Sufficient experimental results on the network synchronization are given to ensure that the dynamic network can synchronize the individual node state in any specified networks. Finally, numerical simulations show the good performance of this proposed scheme.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Nowadays, complex networks have been intensively investigate across fields of science and engineering [1–5], for lots of systems in nature can be described by the model of complex network, such as the Internet, communication networks, word wide web, food web, and so on. In fact, synchronization is a kind of typical collective behaviors and basic motions in nature.
System with time delays is quite ubiquitous in nature. The time delays are usually caused by the tolerance of some reaction itself in communication and epidemic transportation tetrad or by the tolerance of some reaction itself in communication and epidemic, respectively. Therefore, time delays should be modeled in order to simulating more realistic networks. In [6] C. Li and G. Chen introduced complex dynamical network and investigate their synchronization phenomena and criteria. In [7] J. Zhou and T. Chen investigated synchronization dynamics of a general model of complex delayed networks as well as the effects of time delays. In [8], Atay provided synchronization of couples network with coupling delays, and found proper time. Daly may be helpful to synchronization. Of course, there are also some other previous works [9, 10] and so on are introduced in this area.
These works involved mainly focus on delay nodes and global coupling networks with time delay \( \tau \), which is usually a constant. Nevertheless, many real networks are not so. Thereby, we study adaptive synchronization of complex network with time-varying delay nodes and delay coupling, which can better explain a variety of dynamic characteristics and provide theoretic references for the control of real networks.
The rest of the paper is organized as follows: in Sect. 2 the hypothesis, lemma and model have been proposed. And then, based on Lyapunov stability theory, we study the sufficient condition and corollary of synchronization on networks. In Sect. 3, we give numerical simulations, and the conclusion was presented in Sect. 4.
2 Adaptive Synchronization of Complex Networks with Time-Varying Delay
This section introduces an uncertain complex dynamical model and gives some preliminary definitions and hypotheses. Consider an uncertain nonlinear coupling dynamical network consisting of N identical nodes, which is described as follows:
For all \( t \ge 0 \), where \( 1 \le i \le N \), \( x_{i} = \left( {x_{i1} ,x_{i2} , \ldots ,x_{in} } \right)^{T} \in R^{n} \) is the state vector of ith node;
\( f_{k} :R^{n} \times R^{ + } \to R^{n} ,k = 1,2 \) are smooth nonlinear function; \( g_{j} :R^{m} \to R^{n} \) are uncertain continuous nonlinear coupling functions, where \( m = nN,1 \le j \le N \); The delay \( \tau (t) \) is nonnegative continuous functions; \( u_{i} \in R^{n} \) are the control inputs.
When the network realizes synchronization, there will be \( x_{1} = x_{2} = \ldots = x_{N} \). At the same time, the coupled control terms will disappear, namely \( g_{i} \left( {\varvec{x}\left( {t - \tau \left( t \right)} \right)} \right) + u_{i} = 0,1 \le i \le N \). This will ensure that an arbitrary solution \( x_{i} \left( t \right) \) of single nodes is also a solution of the synchronous coupling network.
Take \( s\left( t \right) \) as the solution of isolated node in network, and assume that the solution is existent and unique, then this solution satisfies:
where \( s\left( t \right) \) can be generated an equilibrium point, a periodic orbit, a periodic orbit, or a chaotic orbit in the phase apace.
Define error vector as follows:
Then the objective of controller \( u_{i} \) is to guide the dynamical network (1) to synchronize. That is
According to Eqs. (1) and (2), we have:
where \( \tilde{f}_{1} (x_{i} ,s) = f_{1} (x_{i} ,t) - f_{1} (s,t) \)
Make Eq. (5) partly lined at \( s\left( {t,\tau \left( t \right)} \right) \):
where \( \varvec{A}(t) = Df_{1} (s,t)\;\varvec{B}\left( t \right) = Df_{2} \left( {s,t} \right) \) is Jacobin matrix of \( f_{k} \left( {k = 1,2} \right) \), and \( e_{i} = x_{i} \left( t \right) - s\left( {t,\tau \left( t \right)} \right) \)
In the following, we will give a hypothesis and lemma:
Hypothesis 1.
(H1) Assume that there exists a nonnegative constant \( \alpha ,\beta \) and \( \gamma_{ij} ,i,j = 1,2, \ldots ,N \), satisfying
Remark 1.
If (H1) holds, then we get:
Lemma 1.
[11] If \( x \) and \( y \) are vectors, and \( \varepsilon \) is nonnegative constant, then the following inequality hold:
Theorem 1.
Let the hypothetical condition and Lemma are satisfied and \( \dot{\tau }\left( t \right) < \sigma \left( {\sigma < 1} \right) \). Then the synchronous solution \( s\left( t \right) \) of uncertain dynamical network (1) is asymptotic stable under the adaptive controllers
and updating laws:
where \( k_{i} ,i = 1,2, \ldots ,N \) are positive constants.
Proof.
Consider the Lyapunov candidate as follows:
where \( \hat{d}_{i} \;\left( {1 \le i \le N} \right) \) are positive constants to be determined.
The derivation of \( V\left( \varvec{t} \right) \) along the system (6) is:
where \( {\mathbf{e}} = \left( {\left\| {e_{1} } \right\|_{2} ,\left\| {e_{2} } \right\|_{2} , \ldots ,\left\| {e_{N} } \right\|_{2} } \right)^{T} , \)
Since \( \alpha ,\beta ,\sigma \) and \( \gamma_{ij} {\kern 1pt} {\kern 1pt} {\kern 1pt} \left( {1 \le i,j \le N} \right) \) are nonnegative constants, one can select suitable constants \( \hat{d}_{i} {\kern 1pt} {\kern 1pt} {\kern 1pt} \left( {1 \le i \le N} \right) \), to make \( diag\left\{ {\alpha + \frac{{\beta^{2} }}{2} + \frac{1}{1 - \sigma } - \hat{d}_{1} , \ldots ,\alpha + \frac{{\beta^{2} }}{2} + \frac{1}{1 - \sigma } - \hat{d}_{N} } \right\} + \frac{1}{2}{\mathbf{e}}^{T} \varvec{\varGamma \varGamma }^{T} \)to be a negative definite matrix. Thus it follows error vector \( e_{i} \left( t \right) \to 0{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \left( {1 \le i \le N} \right) \) as \( t \to \infty \). That is the synchronous solution \( s\left( t \right) \) of uncertain dynamical network (1) is asymptotic stable. The proof is thus completed.
For linear coupling, H1 is naturally satisfied. Thus one get the following corollary.
Corollary 1.
Let the hypothetical condition is satisfied, and \( \dot{\tau }\left( t \right) < \sigma {\kern 1pt} \left( {\sigma < 1} \right),g_{j} :R^{m} \to R^{n} \) are uncertain continuous linear coupling functions, where \( m = nN \). We also get asymptotic stable under the adaptive controllers (11) and (12).
3 Numerical Simulation
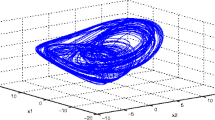
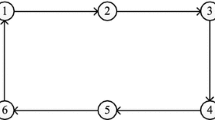
This section presents an example to show the effectiveness of above synchronization criterions. Consider the coupling function \( g_{i} \left( {\varvec{x}\left( {t - \tau \left( t \right)} \right)} \right) = \sum\limits_{j = 1}^{N} {c_{ij} x_{j} \left( {t - \tau \left( t \right)} \right)} \). Obviously, it satisfied previous hypothetical condition, where \( c_{ij} \) is an unknown parameter, the node dynamical function is \( \dot{x} = - \lambda x + \gamma x\left( {t - \tau } \right)\left( {1 - x\left( {t - \tau } \right)} \right),\,\tau = 0.1 \). This network is formed by the Logistic system with two balanced points \( s_{0} = 0,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} s_{1} = 1 - {\lambda \mathord{\left/ {\vphantom {\lambda \gamma }} \right. \kern-0pt} \gamma } \). When \( \lambda = 26,\,\gamma = 104 \), the system will begin chaotic state. For simplicity, we investigate the network with ten nodes with time-varying delays, coupling strength between nodes are 0.1, \( \tau \left( t \right) = 0.1 - 0.02\sin \left( {5t} \right) \).
The dynamical system is described as follows:
When \( i = 1 \), we can get:
In the same way, when i = 10.
Take \( s = 1 - {\lambda \mathord{\left/ {\vphantom {\lambda \gamma }} \right. \kern-0pt} \gamma } = 0.75 \) as the goal of synchronization. When \( \alpha = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \beta = 2 \), \( \sigma = 0.5 \) and \( \hat{d}_{i} > 6 \), obviously, which satisfies assumption.
As described in Figs. 1 and 2, for the case of identical topological structures, the larger the control strengths \( k_{i} {\kern 1pt} {\kern 1pt} ,i = 1,2, \ldots ,N \), the faster the convergence to synchronization.

\( k_{i} = 5 \)

\( k_{i} = 10 \)
4 Conclusion
This paper mainly studied the adaptive synchronization of complex network with time-varying delay, which relates to both nodes and coupling. Based on Lyapunov stability theory, the sufficient condition and Corollary of adaptive synchronization were also given to guarantee that the dynamical network synchronizes at individual node state in arbitrary specified network. Finally, the numerical simulations results showed the validity of theory.
References
Albert, R., Barabasi, A.L.: Statistical mechanics of complex networks. Mod. Phys. 74(1), 47–97 (2002)
Wang, X., Chen, G.: Complex networks: small-world, scale-free and beyond. IEEE Circ. Syst. 3(1), 6–20 (2003)
Lü, J., Yu, X., Chen, G., Cheng, D.: Characterizing the synchronizability of small-world dynamical networks. IEEE Trans. Circ. Syst. 51(4), 787–796 (2004)
Liu, Y.Z., Jiang, C.S., Lin, C.S., et al.: Chaotic synchronization secure communications based on the Lorenz systems switch. J. Electron. Inf. Technol. 29(11), 2641–2644 (2009)
Zhou, J., Xiang, L., Liu, Z.R.: Synchronization in complex delayed dynamical networks with impulsive effects. Phys. A 384, 684–692 (2007)
Li, C., Chen, G.: Synchronization in general complex delayed dynamical networks with coupling delays. Phys. A 2004(343), 263–278 (2004)
Zhou, J., Chen, T.: Synchronization in general complex delayed dynamical networks. IEEE Trans. Circ. Syst. Reg. Pap. 53(3), 733–744 (2006)
Atay, F., Masoller, F.: Complex transitions to synchronization in delay-coupled networks of logistic maps. Final Version Eur. Phys. 62(5), 119–126 (2011)
Yang, Z.Q., Liu, Z.X.: Adaptive synchronization of uncertain complex delayed dynamical networks. Int. J. Nonlinear Sci. 3(2), 125–132 (2007)
Luo, Q., Wu, W., Li, L.X., Yang, Y.X., Peng, H.P.: Adaptive synchronization re search on the uncertain complex networks with time-delay. ACTA Phys. Sin. 57(3), 60–65 (2008)
Li, P., Yi, Z.: Synchronization analysis of delay complex networks with time-varying couplings. Phys. A 87(3), 3729–3737 (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Zhang, Y., Li, F. (2014). Adaptive Synchronization of Complex Networks with Time-Varying Delay Nodes and Delay Coupling. In: Yuan, Y., Wu, X., Lu, Y. (eds) Trustworthy Computing and Services. ISCTCS 2013. Communications in Computer and Information Science, vol 426. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-43908-1_36
Download citation
DOI: https://doi.org/10.1007/978-3-662-43908-1_36
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-43907-4
Online ISBN: 978-3-662-43908-1
eBook Packages: Computer ScienceComputer Science (R0)