
Abstract
In this paper an electromechanical system with two different types of motor is considered. It is shown that during the spin-up, the system with DC motor may experience unwanted vibration—the Sommerfeld effect. This is a well-known effect when the motor of electromechanical system gets stuck near the resonance zone instead of reaching its nominal power. The absence of this effect is demonstrated in the system with synchronous motor. Nowadays, there are many works devoted to the study of this effect in various systems. Here we discuss the Sommerfeld effect from the point of view of localization of the so-called hidden oscillations.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others
Keywords
- European Physical Journal Special Topic
- Transient Process
- Unstable Equilibrium
- Electromechanical System
- Synchronous Motor
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
In order to obtain a well-operating electromechanical system, it is important to perform the stability and oscillation analysis of its corresponding mathematical model. An oscillation in a dynamical system is either self-excited or hidden attractor [7, 8, 10, 11]. An attractor is called a hidden attractor if its basin of attraction does not intersect with small neighborhoods of equilibria, otherwise, it is called a self-excited attractor. The basin of attraction of self-excited attractor is associated with an unstable equilibrium. In other words, the self-excited attractors can be localized numerically by the following standard computational procedure: a trajectory, which starts from a point of an unstable manifold in a neighborhood of an unstable equilibrium, after a transient process is attracted to the state of oscillation and traces it. In contrast, hidden attractor’s basin of attraction is not associated with unstable equilibria. Recent examples of hidden attractors can be found in The European Physical Journal Special Topics: Multistability: Uncovering Hidden Attractors, 2015 (see [2, 4–6, 12–16, 18–20]).
Hidden oscillations appear naturally in systems without equilibria, describing various mechanical and electromechanical models with rotation. In 1902 Arnold Sommerfeld described one of the first examples of such models [17]. He studied vibrations caused by a motor actuating on unbalanced rotor and discovered the resonance capture phenomenon (Sommerfeld effect). Discussing the nature of this capture phenomenon, Sommerfeld wrote: “This experiment corresponds roughly to the case in which a factory owner has a machine set on a poor foundation running at 30 horsepower. He achieves an effective level of just 1/3, however, because only 10 horsepower are doing useful work, while 20 horsepower are transferred to the foundational masonry” [3].
Further we will consider mechanical model actuated by DC motor, where the Sommerfeld effect corresponds to the existence of hidden oscillation. We will also demonstrate when Sommerfeld effect is absent for the same model actuated by synchronous motor.
2 Unbalanced Rotor on a Rigid Platform
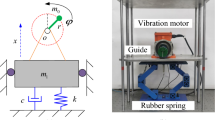
Following the work [1], we consider the first electromechanical system, which is unbalanced rotor placed on a rigid platform. The platform can move only horizontally and is connected to a wall by means of damping and elastic elements (see Fig. 1). The system of equations of motion is the following:
Here φ is the rotation angle of the rotor, x is the displacement of the platform, J is the moment of inertia of the rotor, m 0 is the eccentric mass of the rotor, M is the mass of the platform, c is stiffness, β is friction coefficient, l is the eccentricity of mass m 0, and \(\mathcal{G}(\dot{\varphi })\) is the motor torque.

Scheme of unbalanced rotor on a rigid platform
Let us consider two different types of motor for this system and see whether the Sommerfeld effect can be found.
2.1 Sommerfeld Effect in the System
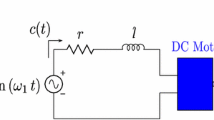
First, we consider a limited power DC motor
where Δ and k are constant parameters of the motor.
For computer simulation we take the following parameters: J = 0. 014, M = 10. 5, m 0 = 1. 5, l = 0. 04, k = 0. 005, c = 5300, β = 5, and Δ = 0. 49. For initial data \(\dot{x}(0) = x(0) =\varphi (0) =\dot{\varphi } (0) = 0\) the Sommerfeld effect occurs. For other initial data \(\dot{x}(0) = x(0) =\varphi (0) = 0,\dot{\varphi }(0) = 40\) we observe normal operation—the achievement of desired rotational velocity of our mechanical system.Footnote 1 The transient processes for both the initial data and the corresponding attractors are shown in Fig. 2. Comparison of this situation with experiment of Sommerfeld gives the following result: when the Sommerfeld effect occurs, the effective level of only about 1/4 is achieved (comparing to the normal operation). Note that in this example we have the coexistence of attractors, which are hidden in the sense of mathematical definition. But from a physical point of view, the zero initial data correspond to typical start of the system, so the Sommerfeld effect can be easily localized, while the normal operation is hidden.

Sommerfeld effect and normal operation in unbalanced rotor on a rigid platform
2.2 Absence of the Sommerfeld Effect
Consider now the following mathematical model of synchronous motor:
where θ is the phase difference between the rotating magnetic field and the rotor (θ = φ −ω t, where φ is the rotation angle of the rotor as before), α is the coefficient of damper windings, and ω is the current frequency in the stator windings.
Then the equations of “unbalanced rotor on a rigid platform” system take the form:
In [9] it was mathematically rigorously proved that there is no Sommerfeld effect in system (4) if it is actuated asynchronously (asynchronous actuation means that \(x(0) =\dot{ x}(0) =\dot{\theta } (0) = 0\)). It is shown that the following equation is valid for sufficiently small l and large t:
After the transient process the synchronous machine reaches normal operation mode with the rotation frequency of rotor equal to ω + O(l). The platform oscillations can be approximated by the harmonic oscillation with the frequency ω + O(l) and the amplitude
Thus, if the eigenfrequency of the platform is less than ω, then in the case of asynchronous actuation system (4) always passes resonance and enters normal operation mode after transient process.

Normal operation in unbalanced rotor on a rigid platform
Computer simulation of (4) with parameters J = 0. 014, M = 10. 5, m 0 = 1. 5, l = 0. 04, α = 0. 5, c = 5300, β = 5, ω = 90, and initial data \(\dot{x}(0) = x(0) =\varphi (0) =\theta (0) =\dot{\varphi } (0) =\dot{\theta } (0)+\omega = 0\) gives a normal operation, which is shown in Fig. 3. The normal operation is a hidden attractor in the sense of mathematical definition, but from a physical point of view, it is easily localized. Remark that the computation with other initial data does not reveal any other coexisting attractors, thus our experiments expand the work [9], where the limitation on initial data is assumed.
3 Conclusion
In this paper two types of vibrational units with unbalanced rotors are considered. It is demonstrated that under certain conditions system (1) and (2) experiences the Sommerfeld effect, namely the resonance capture phenomenon. Here the Sommerfeld effect can be regarded as the coexistence of hidden oscillations since the system has no equilibrium states. Also an example of similar model without Sommerfeld effect is shown.
Notes
- 1.
For this system with β = 0. 005, k = 5, Δ = 0. 5, or Δ = 0. 51 both the effects were discussed in [1]. Here we give more precise parameter values.
References
Blekhman II, Indeitsev DA, Fradkov AL (2007) Slow motions in systems with inertially excited vibrations. IFAC Proc Vol (IFAC-PapersOnline) 3(1):126–131
Brezetskyi S, Dudkowski D, Kapitaniak T (2015) Rare and hidden attractors in van der Pol-Duffing oscillators. Eur Phys J: Spec Top 224(8):1459–1467
Eckert M (2013) Arnold Sommerfeld: science, life and turbulent times 1868–1951. Springer, Berlin
Feng Y, Wei Z (2015) Delayed feedback control and bifurcation analysis of the generalized Sprott B system with hidden attractors. Eur Phys J: Spec Top 224(8):1619–1636
Feng Y, Pu J, Wei Z (2015) Switched generalized function projective synchronization of two hyperchaotic systems with hidden attractors. Eur Phys J: Spec Top 224(8):1593–1604
Jafari S, Sprott JC, Nazarimehr F (2015) Recent new examples of hidden attractors. Eur Phys J: Spec Top 224(8):1469–1476
Kuznetsov NV (2016) Hidden attractors in fundamental problems and engineering models. A short survey. Lecture notes in electrical engineering, vol. 371, pp 13–25 [plenary lecture at AETA 2015: Recent Advances in Electrical Engineering and Related Sciences]
Kuznetsov NV, Leonov GA, Vagaitsev VI (2010) Analytical-numerical method for attractor localization of generalized Chua’s system. IFAC Proc Vol (IFAC-PapersOnline) 4(1):29–33
Leonov GA (2008) The passage through resonance of synchronous electric motors mounted on an elastic base. J Appl Math Mech 72(6):631–637
Leonov GA, Kuznetsov NV (2013) Hidden attractors in dynamical systems. From hidden oscillations in Hilbert-Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractors in Chua circuits. Int J Bifurcation and Chaos 23(1). Art. no. 1330002
Leonov GA, Kuznetsov NV, Mokaev TN (2015) Homoclinic orbits, and self-excited and hidden attractors in a Lorenz-like system describing convective fluid motion. Eur Phys J Spec Top 224(8):1421–1458
Li C, Hu W, Sprott JC, Wang X (2015) Multistability in symmetric chaotic systems. Eur Phys J: Spec Top 224(8):1493–1506
Pham VT, Vaidyanathan S, Volos CK, Jafari S (2015) Hidden attractors in a chaotic system with an exponential nonlinear term. Eur Phys J: Spec Top 224(8):1507–1517
Saha P, Saha DC, Ray A, Chowdhury AR (2015). Memristive non-linear system and hidden attractor. Eur Phys J: Spec Top 224(8):1563–1574
Shahzad M, Pham V-T, Ahmad MA, Jafari S, Hadaeghi F (2015) Synchronization and circuit design of a chaotic system with coexisting hidden attractors. Eur Phys J: Spec Top 224(8):1637–1652
Sharma PR, Shrimali MD, Prasad A, Kuznetsov NV, Leonov GA (2015) Control of multistability in hidden attractors. Eur Phys J Spec Top 224(8):1485–1491
Sommerfeld A (1902) Beitrage zum dynamischen ausbau der festigkeitslehre. Zeitschrift des Vereins deutscher Ingenieure 46:391–394
Sprott JC (2015) Strange attractors with various equilibrium types. Eur Phys J: Spec Top 224(8):1409–1419
Vaidyanathan S, Pham V-T, Volos CK (2015). A 5-D hyperchaotic Rikitake dynamo system with hidden attractors. Eur Phys J: Spec Top 224(8):1575–1592
Zhusubaliyev ZT, Mosekilde E, Churilov AN, Medvedev A (2015) Multistability and hidden attractors in an impulsive Goodwin oscillator with time delay. Eur Phys J: Spec Top 224(8):1519–1539
Acknowledgements
Authors were supported by Saint-Petersburg State University (6.38.505.2014).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Kiseleva, M., Kondratyeva, N., Kuznetsov, N., Leonov, G. (2017). Hidden Oscillations in Electromechanical Systems. In: Irschik, H., Belyaev, A., Krommer, M. (eds) Dynamics and Control of Advanced Structures and Machines. Springer, Cham. https://doi.org/10.1007/978-3-319-43080-5_13
Download citation
DOI: https://doi.org/10.1007/978-3-319-43080-5_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-43079-9
Online ISBN: 978-3-319-43080-5
eBook Packages: EngineeringEngineering (R0)