
Abstract
This paper investigates both the stability and \(H_{\infty }\) performance for a class of 2-D discrete systems with time-varying delays described by Fornasini-Marchesini (FM) second model. A new sufficient condition for asymptotic stability with \(H_{\infty }\) performance of these systems is developed based on differences of Lyapunov functionals proposed through introducing free weighting matrices. The findings are later tested via linear matrix inequality (LMI) feasibility. A numerical example is presented to demonstrate the effectiveness and benefits of the result obtained in this study.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The 2-D systems are found in various practical and physical processes where the information propagation occurs in two independent directions such as gas absorption and water stream heating. During the last decade, the research on 2-D systems both in practice and theory has enticed a large number of scholars due to their extensive applications [16], for example, image data processing, circuit analysis, transmission and other areas.
It has been well recognized that time-delay often occurs in practical systems, particularly in 2-D systems due to data transmission and finite speed of information processing among various parts of the system [20]. In addition, the reaction of realistic systems to external signals is seldom instantaneous and always affected by time delays. The time-delay frequently degrades the system performance and even causes the system instability [13]. Therefore, the exploration of time-delay systems stability plays a key role in applied models which has caused quite a stir in recent years.
The \(H_{\infty }\) technique introduced in [9] has been in the spotlight in recent years which attracted researchers, for example [5, 7, 8, 12, 17, 22, 23]. One of it many advantages is that it is insensitive to the exact knowledge of the statistics of the noise signals.
In this paper, 2-D systems are described by Fornasini-Marchesini (FM) second model [6, 10, 11] and based on the free-weighting matrix approach, proposed in [14, 15, 21] and by constructing a Lyapunov functional [18], a delay-dependent \(H_{\infty }\) performance analysis is reached by keeping some useful terms from the difference of Lyapunov functions.
This paper is adjusted to five sections: In Sect. 2, the problem under study is formulated. In Sect. 3, new criterion is obtained in terms of LMI, which ensure the asymptotic stability and the \(H_{\infty }\) performance of 2-D discrete systems described by the FM second model. Numerical examples are given to highlight the results in Sect. 4. Finally, some conclusions are provided in Sect. 5.
Notations: Throughout the paper, \(\mathbb {R}^{p}\) denotes the p-dimensional real Euclidean space, \(\mathbb {R}^{p\times q}\) denotes the set of all \(p\times q\) matrices. \(\mathbf{0} \) and I represent zero matrix identity matrix respectively. \(diag\{...\}\) denotes a block-diagonal matrix in symmetric block matrices or long matrix expressions. \(X^{T}\) stand for the transpose and the matrix X. \(Q >0\) \((Q < 0)\) means that Q is real symmetric and positive (negative) definite matrix. The notation ||x|| stands for the Euclidean norm of the vector x.
2 Problem Formulation
We consider the 2-D system with time-varying delays described by the following FM second model [10]:
where \(x({s_{1},s_{2}})\in \mathbb {R}^{n}\) is the state vector, \(z({s_{1},s_{2}})\in \mathbb {R}^{m}\) the signal to be estimated, \(w({s_{1},s_{2}})\in \mathbb {R}^{s}\) is the disturbance input. \(A_{1}\), \(A_{2}\), \(A_{1d}\), \(A_{2d}\), \(B_{1}\), \(B_{2}\), C and D are constant matrices with appropriate dimensions, \(d_{i}\) and \(d_{j}\) are time varying delays along horizontal and vertical directions, respectively, satisfying \(\tau _{1}\le d_{j}\le \tau _{2}\) and \(\tau _{3}\le d_{i}\le \tau _{4}\) where \(\tau _{1}\), \(\tau _{2}\), \(\tau _{3}\) and \(\tau _{4}\) are known positive integers \(\tau _{v}=\tau _{2}-\tau _{1}\) and \(\tau _{h}=\tau _{4}-\tau _{3}\).
The boundary conditions for the system are specified as:
In what follows, the boundary conditions assumed to satisfy:
By considering the zero initial conditions, the \(H\infty \) norm of the system in (1) is given by:
where \(\sigma _{max}\) denotes the maximum singular value of the corresponding matrix, and
is the transfer function from the disturbance input \(w(s_{1},s_{2})\) to the output \(z(s_{1},s_{2})\) for the system in (1).
To get the main results of this paper, the following definition and lemmas are needed.
lemma1 [4] For given symmetric matrices
where \(S_{11}\) and \(S_{22}\) are square matrices, the following conditions are equivalent

Definition 1
[24] The 2-D system given in (1) with zero boundary conditions in (2) is said to have \(H_{\infty }\) disturbance attenuation \(\gamma \) if it is asymptotically stable and:
For any nonzero \(w(s_{1},s_{2})\in {L_{2}}\{[0,\infty ),[0,\infty )\}\) where
3 Main Results
In this section, we consider the \(H_{\infty }\) performance analysis problem of system (1). For this case the following theorem holds.
Theorem 1
Given integers \(\tau _{1}\le d_{j}\le \tau _{2}\) and \(\tau _{3}\le d_{i}\le \tau _{4}\) and scalar \(\gamma >0\) the system (1) with time varying \(d_{i}\) and \(d_{j}\) satisfying initial conditions given in (2) is asymptotically stable for all nonzero \(w({s_{1},s_{2}})\in L_{2}\{[0,\infty ),[0,\infty )\}\) and (3) is satisfied if there exist appropriately dimensioned matrices \(P=P_{a}+P_{b}=P^{T}>0\), for \(i=1,2, j=1,2\), \(Q_{ij}=Q_{ij}^{T}>0\), \(Z_{1j}=Z_{1j}^{T}>0\), \(Z_{2j}=Z_{2j}^{T}>0\), for \(j=h,v\) \(X_{j}=\left[ \begin{array}{cc} X_{11j} &{} X_{12j}\\ * &{} X_{22j}\\ \end{array}\right] \ge 0,\) \(Y_{j}=\left[ \begin{array}{cc} Y_{11j} &{} Y_{12j}\\ * &{} Y_{22j}\\ \end{array}\right] \ge 0,\quad \) \(N_{j}=\left[ \begin{array}{c} N_{1j}\\ N_{2j}\\ \end{array}\right] \), \(M_{j}= \left[ \begin{array}{c} M_{1j}\\ M_{2j}\\ \end{array}\right] \), \(S_{j}= \left[ \begin{array}{c} S_{1j}\\ S_{2j}\\ \end{array}\right] , for\quad j=1,2\) such that the following matrix inequalities hold:
and
where
the zero matrix is appropriately dimensioned.
with

also
Proof
Let
\(\Rightarrow \) \(\eta _{1}(s_{1},s_{2})=\phi _{1}x_{sys}(s_{1},s_{2})\)
The same for the vertical direction:
\(\Rightarrow \) \(\eta _{2}(s_{1},s_{2})=\phi _{2}x_{sys}(s_{1},s_{2})\)
Choose a Lyapunov functional candidate to be

where \(P=P_{a}+P_{b}=P^{T}>0\), \(Q_{ij}=Q_{ij}^{T}>0\), i = 1, 2, j=1,2, \(Z_{1j}=Z_{1j}^{T}>0\) j = 1, 2, \(Z_{2j}=Z_{2j}^{T}>0\) j = 1, 2 are to be calculated. Defining \(\varDelta V(s_{1}+1,s_{2})=V(s_{1}+1,s_{2})-V(s_{1},s_{2})\) and \(\varDelta V(s_{1},s_{2}+1)=V(s_{1},s_{2}+1)-V(s_{1},s_{2})\) yields


From (5), we have

the same for vertical direction.
then the following equations are true for any matrices \(N_{1}\), \(N_{2}\), \(M_{1}\), \(M_{2}\), \(S_{1}\) and \(S_{2}\) with appropriate dimensions for \(\varDelta V(s_{1},s_{2}+1):\)
The same thing for \(\varDelta V(s_{1}+1,s_{2})\).
In the other hand, for any appropriately dimensioned matrices \(X_{i}=X_{i}^{T}\ge 0,\) \(Y_{i}=Y_{i}^{T}\ge 0,\) for i = h, v, the following equations are true:
Then, if the terms of the right side of the Eqs. (7)–(13) are added to \(\varDelta V(s_{1},s_{2})=\varDelta V(s_{1}+1,s_{2})+V(s_{1},s_{2}+1)\), we have:

thus if \(\varPsi _{1j}, \varPsi _{2j}\ge 0, \varPsi _{3j}\ge 0 \; for \; j=1,2\) and
which is equivalent to (4) by schur compliments, then
This ensures that (3) holds under zero-initial conditions for all nonzero \(w({s_{1},s_{2}})\in L_{2}\{[0,\infty ),[0,\infty )\}\) and a specified \(\gamma >0\) following the similar line in [25]. On the other hand, (4) entails that the following matrix inequality (14) holds, which guarantees \(\varDelta V(s_{1},s_{2})<0\), such that the system (1) with \(w({s_{1},s_{2}})=0\) is asymptotically stable.
where

This completes the proof. \(\square \)
Remarque:
The terms \(\sum _{l=s_{1}-\bar{h_{1}}}^{s_{1}-d_{i}-1}\eta _{1}^{T}(l,s_{2})Z_{s_{1}}\eta _{1}(l,s_{2})\) and \(\sum _{l=s_{2}-\bar{h_{2}}}^{s_{2}-d_{j}-1}\eta _{2}^{T}(s_{1},l)Z_{s_{2}}\eta _{2}(s_{1},l)\) are kept in Theorem 1 to overcome the conservativeness. On the other hand, \(\tau _{2}\) and \(\tau _{4}\) are split into two parts like \(d_{j}\) and \(\tau _{2}-d_{j}\), \(d_{i}\) and \(\tau _{4}-d_{i}\), for vertical and horizontal direction, respectively, in order to prove Theorem 1 thus showing the benefits of the suggested method.

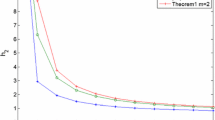
Transfer function (Example 1).
4 Numerical Example
In this section, we will give a numerical example to illustrate the applicability of the proposed result.
Example 1
[19] Denote the design of 2-D delay-dependent \( H_ {\infty } \) performance and filter for a stationary random field in image processing where the disturbances are a random process (noise), using LMI approach proposed in (4), the 2-D system can be converted to the 2-D FM model system (1) with the ensuing parameters:
Given \(\tau _{3}=3\), \(\tau _{4}=3\), \(\tau _{1}=2\), \(\tau _{2}=2\) by solving the LMIs, the minimum \(H_{\infty }\) norm bound for this example is \(\gamma _{opt}= 6.9671\).
Fig. 1 shows the maximum singular values plot of the transfer function matrix of the system (1). In the figure, the grids denote the obtained \( H_ {\infty } \) disturbance attenuations and its maximum value is 6.3725, which is below 6.9671.
5 Conclusion
This paper has explored the problems of stability and delay-dependent \(H_{\infty }\) performance analysis for 2-D discrete systems with time varying delay described by FM second model without ignoring any terms in the derivative of lyapunov functional by considering the relationship between the delay and it upper bound. The new criteria may be extended to systems with uncertainties.
References
Badie, K., Alfidi, M., Chalh, Z.: Improved delay-dependent stability criteria for 2-D discrete state delayed systems. In: 2018 International Conference on Intelligent Systems and Computer Vision (ISCV), pp. 1–6. IEEE (2018)
Badie, K., Alfidi, M., Chalh, Z.: New relaxed stability conditions for uncertain two-dimensional discrete systems. J. Control Autom. Electr. Syst. 29(6), 661–669 (2018)
Badie, K., Alfidi, M., Tadeo, F., Chalh, Z.: Correction to: delay-dependent stability and \( H_ {\infty }\) performance of 2-D continuous systems with delays. Circ. Syst. Sig. Process. 37(12), 5688–5689 (2018)
Boyd, S., El Ghaoui, L., Feron, E., Balakrishnan, V.: Linear Matrix Inequalities in System and Control Theory, vol. 15. SIAM, Philadelphia (1994)
Chen, S.F., Fong, I.K.: Delay-dependent robust \( H_ {\infty }\) filtering for uncertain 2-D state-delayed systems. Sig. Process. 87, 2659–2672 (2007)
Dumistrescu, B.: LMI stability tests for the Fornasini-Marchesini model. IEEE Trans. Sig. Process. 56, 4091–4095 (2008)
deSouza, C.E., Xie, L., Wang, Y.: \(H_ {\infty }\) filtering for a class of uncertain non linear systems. Syst. Control Lett. 20, 419–426 (1993)
de Oliveira, M.C., Geromel, J.C.: H2 and \(H_ {\infty }\) filtering design subject to implementation uncertainty. SIAM J. Control Optim. 44, 515–530 (2005)
Elsayed, A., Grimble, M.J.: A new approach to the \(H_ {\infty }\) design of optimal digital linear filters. IMA J. Math. Control Inform. 6(2), 233–251 (1989)
Fornasini, E., Marchesini, G.: State-space realization theory of two-dimensional filters. IEEE Trans. Autom. Control 21(4), 484–492 (1976)
Fornasini, E., Marchesini, G.: Doubly-indexed dynamical systems: State-space models and structural properties. Math. Syst. Theory 12, 59–72 (1978)
Geromel, J.C., de Oliveira, M.C., Bernussou, J.: Robust filtering of discrete-time linear systems with parameter dependent Lyapunov functions. SIAM J. Control Optim. 41, 700–711 (2002)
Gu, K., Kharitonov, V.L., Chen, J.: Stability of Time-delay Systems. Birkhauser, Boston (2003)
He, Y., Wu, M., She, J.H., Liu, G.P.: Delay-dependent robust stability criteria for uncertain neutral systems with mixed delays. Syst. Control Lett. 51, 57–65 (2004)
He, Y., Wu, M., She, J.H., Liu, G.P.: Parameter-dependent Lyapunov functional for stability of time-delay systems with polytopic-type uncertainties. IEEE Trans. Autom. Control 49, 828–832 (2004)
Kaczorek, T.: Two-dimensional Linear Systems. Springer, Berlin (1985)
Nagpal, K.M., Khargonekar, P.P.: Filtering and smoothing in an H/sup infinity/setting. IEEE Trans. Autom. Control 36(2), 152–166 (1991)
Ooba, T.: On stability analysis of 2-D systems based on 2-D Lyapunov matrix inequalities. IEEE Trans. Circuits Syst. I(47), 1263–1265 (2000)
Peng, D., Guan, X.: \(H_ {\infty }\) filtering of 2-D discrete state-delayed systems. Multidimension. Syst. Signal Process. 20(3), 265–284 (2009)
Richard, J.: Time-delay systems: An over view of some recent advances and open problem. Automatica 39, 1667–1694 (2003)
Wu, M., He, Y., She, J.H., Liu, G.P.: Delay-dependent criteria for robust stability of time-varying delay systems. Automatica 40, 1435–1439 (2004)
Wang, F., Zhang, Q., Yao, B.: LMI-based reliable \(H_ {\infty }\) filtering with sensor failure. Int. J. Innovative Comput. Inform. Control 2, 737–748 (2006)
Xie, L., deSouza, C.E., Fu, M.: \(H_ {\infty }\) estimation for discrete-time linear uncertain systems. Int. J. Robust Non linear Control 1, 111–123 (1991)
Xu, H., Zou, Y.: Robust \(H_ {\infty }\) filtering for uncertain two-dimensional discrete systems with state-varying delays. Int. J. Control Autom. Syst. 8(4), 720–726 (2010)
Zhang, X.M., Han, Q.L.: Delay-dependent robust \(H_ {\infty }\) filtering for uncertain discrete-time systems with time-varying delay based on a finite sum inequality. IEEE Trans. Circuits Syst. II: Express Briefs 53(12), 1466–1470 (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Oubaidi, M., Chalh, Z., Alfidi, M. (2021). Stability and \(H_{\infty }\) Performance for 2-D Discrete Systems with Time-Varying Delays. In: Saka, A., et al. Advances in Integrated Design and Production. CPI 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-62199-5_7
Download citation
DOI: https://doi.org/10.1007/978-3-030-62199-5_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-62198-8
Online ISBN: 978-3-030-62199-5
eBook Packages: EngineeringEngineering (R0)