
Abstract
The analysis of stability and \(H_{\infty }\) performance of two-dimensional (2-D) Roesser-like continuous systems with delayed states is solved here. Firstly, based on the delay partitioning method, and on the use of an auxiliary function-based integral inequality, a new delay-dependent sufficient condition for asymptotical stability of these systems is developed. Then, the obtained result is extended to \(H_{\infty }\) performance analysis, with all conditions formulated as linear matrix inequalities. Finally, some numerical examples are provided to demonstrate the effectiveness and benefits of the proposed methodology.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Two-dimensional (2-D) systems are an active area of research, with applications in digital data filtering, image processing [24], thermal power engineering [17], etc. Thus, a considerable interest is being devoted to stability of 2-D systems, with a significant number of results already available in the literature. To mention a few, the stability analysis problem has been considered in [1, 9, 14, 20] and the stabilization in [19, 25, 28].
This paper concentrates on 2-D systems that are affected by delays in the states. This is prompted by the fact that several multidimensional systems (for example, mechanical systems, communication networks, chemical processes, etc.) are, by nature, affected by significant delays. These delays are a potential source of instability and performance degradation. Existing stability results for systems with state delays are classified into two categories: delay-independent and delay-dependent stability criteria. In the first case, stability criteria do not depend on the magnitude of the delay; this is clearly restrictive when information on the delays is available, which is frequently the case. To make use of this information on the delays to reduce conservatism, delay-dependent stability criteria are developed here. The majority of previous results for 2-D systems focus on the discrete case [7, 22, 23, 27], except for a few recent papers [2, 3, 16] where a Lyapunov approach is applied to continuous Roesser models. For instance, in [3], the authors dealt with delay-independent stability and stabilization conditions for 2-D continuous systems with delays. In [2], the problem of delay-dependent stability and stabilization with saturation on the control were studied. Recently, a new delay decomposition approach to solve the stability and stabilization problems of continuous 2-D delayed systems with saturation has been proposed in [16].
In addition to stability, performance is important for practical problems: This paper uses an \(H_{\infty }\) technique to reduce the impact of external perturbations on the system states. \(H_{\infty }\) performance analysis of 2-D systems has already been studied for the discrete case [4, 18, 26], but there are few results on \(H_{\infty }\) disturbance attenuation of 2-D continuous systems, in particular in the presence of delays, due to the difficulties of evaluating unidirectional derivatives. We can cite [15], where the delay-independent robust \(H_{\infty }\) filtering for 2-D continuous systems described by Roesser model with delays has been presented. The robust stability and \(H_{\infty }\) control of uncertain 2-D continuous systems with time-varying delays have been discussed in [12].
Although the conditions in [16] have provided delay-dependent criteria that are less conservative than the conditions given in [2, 3, 6], revisiting this problem shows that the stability condition in [16] still leaves much room for improvement. For example, the estimates of single integrals in [16] are obtained by using Jensen inequality [13], which is more conservative than that of the auxiliary function-based integral inequality [21]. Thus, by using the augmented Lyapunov functional and the auxiliary function-based integral inequality, the results are further improved here.
Motivated by the above discussion, this paper focuses on delay-dependent stability and \(H_{\infty }\) performance analysis of 2-D continuous state-delayed systems. By exploiting a delay decomposition approach for the horizontal and vertical states combined with the auxiliary function-based integral inequality, new delay-dependent stability and \(H_{\infty }\) performance analysis criteria are derived in the LMI framework. Some numerical examples are provided to show the validity of the obtained results, and the reduced conservatism when compared with results in the recent literature.
The remainder of this paper is organized as follows: The problem formulation and a necessary lemma are given in Sect. 2. In Sect. 3, the main results are developed. Numerical examples are given to show the effectiveness of the proposed method in Sect. 4. Finally, some conclusions are provided in Sect. 5.
Notations Throughout the paper, \({\mathbb {R}}^{n}\) denotes the n-dimensional real Euclidean space and \({\mathbb {R}}^{n\times m}\) denotes the set of \(n\times m\) matrices. I and 0 represent identity matrix and zero matrix, respectively. ||.|| denotes the Euclidean norm. The superscripts T and \(-1\) stand for the matrix transpose and inverse, respectively. \(P >0\) means that P is real symmetric and positive definite. An asterisk \((*)\) represents a term induced by symmetry, and \(\mathrm{diag}\{...\}\) denotes a block diagonal matrix. sym(M) is the shorthand notation for \(M+M^{T}\). The \({\mathcal {L}}_{2}\) norm of a 2-D signal \(\omega (t_{1},t_{2})\) is given by
where \(\omega (t_{1},t_{2})\) is in \({\mathcal {L}}_{2}\{[0 ,\infty ),[0 ,\infty )\}\) or, for simplicity, in \({\mathcal {L}}_{2}\) if \(||\omega (t_{1},t_{2})||_{2}<\infty \).
2 Problem Formulation and Preliminaries
Consider the following 2-D continuous state-delayed Roesser-like model:
where \(x^{h}(t_{1},t_{2})\in {\mathbb {R}}^{n_{h}}\) and \(x^{v}(t_{1},t_{2})\in {\mathbb {R}}^{n_{v}}\) are the horizontal and vertical states, respectively; \(\omega (t_{1}, t_{2})\in {\mathbb {R}}^{\omega }\) is the disturbance input (which belongs to \({\mathcal {L}}_{2}\{[0, \infty ),[0, \infty )\}\)); \(z(t_{1}, t_{2})\in {\mathbb {R}}^{z}\) is the output; and \(h_{1}\) and \(h_{2}\) are the delays in the horizontal and vertical directions, respectively. Finally, \(A_{11}\), \(A_{12}\), \(A_{21}\), \(A_{22}\), \(A_{d11}\), \(A_{d12}\), \(A_{d21}\), \(A_{d22}\), \(B_{1}\), \(B_{2}\), \(C_{1}\), \(C_{2}\), and D are constant matrices with appropriate dimensions.
The boundary conditions are given by:
where \(T_{1} <\infty \) and \(T_{2} <\infty \) are positive constants, \(f_{\theta }(t_{2})\) and \(g_{\delta }(t_{1})\) are given vectors.
A lemma is now recalled that provides a condition for asymptotic stability; for this, consider a disturbance-free situation, where the state-feedback equation in (1) becomes
Definition 1
[10] The 2-D continuous system (3) with boundary conditions (2) is said to be asymptotically stable if
Definition 2
[9] Let \(V (t_{1}, t_{2}) =V ^{h}(t_{1}, t_{2})+V^{v} (t_{1}, t_{2})\) be a Lyapunov functional of the system (3), and then its unidirectional derivative is given by
Lemma 1
[3] The 2-D system (3) is asymptotically stable if its unidirectional derivative (5) is negative definite.
A performance condition is now provided in the presence of disturbances:
Definition 3
[12] The 2-D continuous state-delayed systems (1) is said to have an \(H_{\infty }\) disturbance attenuation level \(\gamma \) if it is asymptotically stable and under zero boundary conditions satisfies
Lemma 2
(Auxiliary function-based integral inequality [21]) For a positive definite matrix \(Z>0\), and a function y(u), differentiable in u \(\in \) [a, b], the following inequality holds:
where
3 Main Results
3.1 Stability Analysis
In this subsection, the problem of stability analysis of system (3) is investigated:
Theorem 1
Given an integer \(m\ge 1\), the 2-D delayed continuous system (3) is asymptotically stable if there exist matrices \(P=\mathrm{diag}\{P^{h},P^{v}\}>0\), \(Q_{i}=\mathrm{diag}\{Q_{i}^{h},Q_{i}^{v}\}>0\), \(i=\{1,...,5\}\), such that the following LMI is feasible
where
and
Proof
We choose the following Lyapunov–Krasovskii functional candidate for system (3) : \(V(t_{1},t_{2})=V^{h}(t_{1},t_{2})+V^{v}(t_{1},t_{2})\), with
and
where
and \(\dot{x}^{h}(\alpha ,t_{2})= \frac{\partial x^{h}(t_{1},t_{2})}{\partial t_{1}}|_{t_{1}=\alpha }\), \(\dot{x}^{v}(t_{1},\alpha )= \frac{\partial x^{v}(t_{1},t_{2})}{\partial t_{2}}|_{t_{2}=\alpha }\).
Denote
The unidirectional derivative of the Lyapunov–Krasovskii functional results in the following equality:
which, applying Lemma 2, gives
where
Applying the Jensen inequality to the double, triple and quadruple integral terms in \(\dot{V}_{u}(t_{1},t_{2})\) leads to
Define
From all the consequent terms above, it can seen that
Hence, it is clear that if (8) is satisfied, then we obtain \(\dot{V}_{u}(t_{1},t_{2})<0\). This completes the proof. \(\square \)
Remark 1
The Lyapunov function defined in this paper is more general, thanks to the use of the augmented vectors \(\zeta ^{h}(t_{1},t_{2})\), \(\zeta ^{v}(t_{1},t_{2})\), \(\varGamma ^{h}(t_{1},t_{2})\) and \(\varGamma ^{v}(t_{1},t_{2})\). For example:
-
When \(P^{h}=\mathrm{diag}\{P_{1}, 0_{3n,3n} \}\), the function \(V_{0}^{h}(t_{1},t_{2})\) in this paper reduces to \(V_{1}^{h}(x)\) in [2, 16], and the first function of \(V_{1}(t_{1},t_{2})\) in [3].
-
When \(P^{v}=\mathrm{diag}\{P_{2}, 0_{3n,3n} \}\), the function \(V_{0}^{v}(t_{1},t_{2})\) in this paper reduces to \(V_{1}^{v}(x)\) in [2, 16], and the first function of \(V_{2}(t_{1},t_{2})\) in [3].
-
When \(Q^{h}=\mathrm{diag}\{Q_{1},Q_{1},\ldots , Q_{1}\}\), the function \(V_{2}^{h}(t_{1},t_{2})\) in this paper reduces to \(V_{3}^{h}(x)\) in [2], and the second function of \(V_{1}(t_{1},t_{2})\) in [3].
-
When \(Q^{v}=\mathrm{diag}\{Q_{2},Q_{2},\ldots , Q_{2}\}\), the function \(V_{2}^{v}(t_{1},t_{2})\) in this paper reduces to \(V_{3}^{v}(x)\) in [2], and the second function of \(V_{2}(t_{1},t_{2})\) in [3].
In addition, compared with the existing Lyapunov function for 2-D continuous systems with delays, the one proposed in this paper contains some triple, quadruple and quintuple integral terms which are very effective in the reduction of conservatism [8, 21]. This is an additional reason to justify that our results are less conservative than the existing ones.
Remark 2
The number of decision variables in Theorem 1 is \(N=(\frac{m^{2}}{2}+10)n^{2}+(\frac{m}{2}+4)n\).
Remark 3
From Remark 2, it can be seen that the number of decision variables N is related to the delay partitioning parameter m, and it will increase if m increases. The examples at the end of the paper show how increasing m makes possible to further reduce the conservatism, although with the trade-off of increasing the computational cost.
3.2 \(H_{\infty }\) Performance Analysis
This subsection presents a sufficient condition to guarantee a given \(H_{\infty }\) disturbance attenuation level for system (1).
Theorem 2
Given an integer \(m\ge 1\), the 2-D delayed continuous system (1) with the zero boundary condition is asymptotically stable with a \(H_{\infty }\) disturbance attenuation level bound \(\gamma \) if there exist matrices \(P=\mathrm{diag}\{P^{h},P^{v}\}>0\), \(Q_{i}=\mathrm{diag}\{Q_{i}^{h},Q_{i}^{v}\}>0\), \(i=\{1,...,5\}\), such that the following LMI is feasible
where
and
\(X_{1}\), \(Y_{1}\), \(Y_{2}\), \(E_{11}\), \(E_{12}\), \(E_{2}\), \(E_{3}\), \(E_{4}\), \(E_{5}\), F, G, L, \(H_{2}\), \(H_{3}\), \(H_{4}\) and \(H_{5}\) share the same expressions as those in Theorem 1.
Proof
By defining
under the zero boundary condition we have
That is,
where \(\widehat{\xi }(t_{1},t_{2})=\left[ \begin{array}{cc} \xi ^{T}(t_{1},t_{2}) &{} \omega ^{T}(t_{1},t_{2}) \\ \end{array} \right] ^{T}.\)
The matrix inequality in (14) implies that
The proof is thus completed. \(\square \)
Remark 4
The reduced conservatism of Theorem 1 and 2 is guaranteed by the construction of the new Lyapunov functional by combining a delay partitioning method with the auxiliary function-based integral inequality. This constitutes the major difference from existing results in the literature.
Remark 5
The delay-dependent stability and \(H_{\infty }\) performance conditions proposed in this paper have been derived for the nominal system. Nonetheless, it is pointed out that it is not difficult to further extend the results to systems with uncertainties, where the system matrices in (1) contain parameter uncertainties that are norm-bounded or polytopic, which is left as further work.
4 Numerical Examples
Example 1
Consider the 2-D continuous state-delayed system (3) with the following system matrices and parameters:
The stability of this 2-D system cannot be determined by the delay-independent criterion in [3], but can be treated with the approach here when bounds on the delay are available (which is frequently the case in practice). For example, for a given \(h_{1}\), the maximum allowable delay \(h_{2}\) which ensures the asymptotic stability of the system using the method developed here is given in Table 1. From these results, it is clear that Theorem 1 is less conservative than results recently reported in [2, 16].

LMI feasibility domain for stability
The feasibility domain is plotted in Fig. 1: It is clear that the stability domain obtained using Theorem 1 includes the domains obtained using [2] and [16].
Example 2
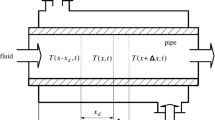
Consider the well-known dynamical system (involved in gas absorption water stream heating and air drying) described by the following Darboux equation with time delays [5]:
where q(x, t) is unknown function at \(x(space)\in [0, x_{f}]\) and \(t(time)\in [0, \infty )\), \(a_{0}\), \(a_{1}\), \(a_{2}\), \(a_{3}\) and b are real coefficients, \(h_{2}\) is the time delay, and u(x, t) is the input function. Let us define
It is easy to verify that equation (15) can be converted into the model (3) with
To carry out a numerical study, the following parameters are also fixed: \(a_{0} = 0.2\), \(a_{1} =-3\), \(a_{2} = -1\), \(a_{3} = -0.4\), \(b = 0\).
The stability for these parameters cannot be solved by the delay-independent criterion in [3]. On the contrary, using Theorem 1, a feasible solution can be found for delays bounded as shown in Table 2.
Example 3
Consider the following 2-D continuous state-delayed system borrowed from [16]
where the maximum delays acceptable for stability are \(h_{1} =\infty \) and \(h_{2} = 6.1725\).
A detailed comparison between the maximum delays that ensure stability, which are obtained using Theorem 1, and the delay-dependent methods proposed in [2, 16] is summarized in Table 3.
In order to analyze \(H_{\infty }\) performance, a disturbance is considered, following (1), modeled with the following system matrices:
Now, we apply Theorem 2 in this paper to calculate the minimum \(\gamma _{min}\) for different values of a constant delay (\(h=h_{1}=h_{2}\)) with the system asymptotically stable and the \(H_{\infty }\) disturbance level is guaranteed to be at least \(\gamma _{min}\). The comparison results are listed in Table 4.
Figure 2 shows the variation of the achieved performance \(\gamma _{min}\) obtained using Theorem 2 and [12], for different h.

Minimum \(H_{\infty }\) performance \(\gamma _{min}\) for different h
5 Conclusion
This paper has investigated in detail the problems of delay-dependent stability and \(H_{\infty }\) performance, for a class of 2-D continuous state-delayed systems. By combining a delay partitioning method with an auxiliary function-based integral inequality, stability and \(H_{\infty }\) performance criteria have been developed, which are less conservative than the existing results, as demonstrated on several numerical examples. The results can be easily extended to the uncertain case. Further work can be done to include stabilization, control and filter design.
Change history
03 July 2018
The original version of the article unfortunately contained typographical errors in unnumbered equations before (12).
References
M. Alfidi, A. Hmamed, Robust stability analysis for 2-D continuous systems via parameter-dependent Lyapunov functions. WSEAS Trans. Syst. Control 2(11), 497–503 (2007)
M. Benhayoun, F. Mesquine, A. Benzaouia, Delay-dependent stabilizability of 2D delayed continuous systems with saturating control. Circuits Syst. Signal Process. 32(6), 2723–2743 (2013)
A. Benzaouia, M. Benhayoun, F. Tadeo, State-feedback stabilization of 2D continuous systems with delays. Int. J. Innov. Comput. Inf. Control 7(2), 977–988 (2011)
C. Du, L. Xie, C. Zhang, \(H_{\infty }\) control and robust stabilization of two-dimensional systems in Roesser models. Automatica 37(2), 205–211 (2001)
M. Dymkov, E. Rogers, S. Dymkou, K. Galkowski, Constrained optimal control theory for differential linear repetitive processes. SIAM J. Control Optim. 47(1), 396–420 (2008)
C. El-Kasri, A. Hmamed, E.H. Tissir, F. Tadeo, Robust \(H_ {\infty }\) filtering for uncertain two-dimensional continuous systems with time-varying delays. Multidimens. Syst. Signal Process. 24(4), 685–706 (2013)
Z.Y. Feng, L. Xu, M. Wu, Y. He, Delay-dependent robust stability and stabilisation of uncertain two-dimensional discrete systems with time-varying delays. IET Control Theory Appl. 4(10), 1959–1971 (2010)
Z. Feng, W.X. Zheng, Improved stability condition for Takagi-Sugeno fuzzy systems with time-varying delay. IEEE Trans. Cybern. 47(3), 661–670 (2017)
K. Galkowski, LMI based stability analysis for 2D continuous systems, in International Conference on Electronics, Circuits and Systems, 3, pp. 923–926 (2002)
M. Ghamgui, N. Yeganefar, O. Bachelier, D. Mehdi, \(H_ {\infty }\) performance analysis of 2D continuous time-varying delay systems. Circuits Syst. Signal Process. 34(11), 3489–3504 (2015)
M. Ghamgui, N. Yeganefar, O. Bachelier, D. Mehdi, Stability and stabilization of 2D continuous state-delayed systems, in Proceedings of 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC), pp. 1878–1883 (2011)
I. Ghous, Z. Xiang, Robust state feedback \(H_{\infty }\) control for uncertain 2-D continuous state delayed systems in the Roesser model. Multidimens. Syst. Signal Process. 27(2), 297–319 (2016)
K. Gu, An integral inequality in the stability problem of time-delay systems, in Proceedings of the 39th IEEE Conference on Decision and Control, 3, pp. 2805–2810 (2000)
A. Hmamed, M. Alfidi, A. Benzaouia, F. Tadeo, LMI conditions for robust stability of 2D linear discrete-time systems. Mathematical Problems in Engineering 2008, 356124, 11 p. (2008)
A. Hmamed, C.E. Kasri, E.H. Tissir, T. Alvarez, F. Tadeo, Robust \(H_{\infty }\) filtering for uncertain 2-D continuous systems with delays. Int. J. Innov. Comput. Inf. Control 9(5), 2167–2183 (2013)
A. Hmamed, S. Kririm, A. Benzaouia, F. Tadeo, Delay-dependent stability and stabilisation of continuous 2D delayed systems with saturating control. Int. J. Syst. Sci. 47(12), 3004–3015 (2016)
T. Kaczorek, Two Dimensional Linear Systems (Springer, Berlin, 1985)
S. Kririm, A. Hmamed, F. Tadeo, Analysis and design of \( H_ {\infty } \) controllers for 2D singular systems with delays. Circuits Syst. Signal Process. 35(5), 1579–1592 (2016)
E.B. Lee, W.S. Lu, Stabilization of two-dimensional systems. IEEE Trans. Autom. Control AC 30, 409–411 (1985)
W.S. Lu, Some new results on stability robustness of two-dimensional discrete systems. Multidimens. Syst. Signal Process. 5, 345–361 (1994)
P. Park, W.I. Lee, S.Y. Lee, Auxiliary function-based integral/summation inequalities: application to continuous/discrete time-delay systems. Int. J. Control Autom. Syst. 14(1), 3 (2016)
W. Paszke, J. Lam, K. Galkowski, S. Xu, Z. Lin, Robust stability and stabilisation of 2D discrete state-delayed systems. Syst. Control Lett. 51(3), 277–291 (2004)
D. Peng, C. Hua, Improved approach to delay-dependent stability and stabilisation of two-dimensional discrete-time systems with interval time-varying delays. IET Control Theory Appl. 9(12), 1839–1845 (2015)
R. Roesser, A discrete state-space model for linear image processing. IEEE Trans. Autom. Control AC–20, 1–10 (1975)
S. Shi, Z. Fei, X. Sun, X. Yang, Stabilization of 2-D switched systems with all modes unstable via switching signal regulation. IEEE Trans. Autom. Control 63(3), 857–863 (2018)
J. Xu, Y. Nan, G. Zhang, G. Ou, H. Ni, Delay-dependent \(H_{\infty }\) control for uncertain 2-D discrete systems with state delay in the Roesser model. Circuits Syst. Signal Process. 32(3), 1097–1112 (2013)
J. Yao, W. Wang, Y. Zou, The delay-range-dependent robust stability analysis for 2-D state-delayed systems with uncertainty. Multidimens. Syst. Signal Process. 24(1), 87–103 (2013)
E. Yaz, On state-feedback stabilization of two-dimensional digital systems. IEEE Trans. Circuits Syst. CAS–32, 1069–1070 (1985)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Badie, K., Alfidi, M., Tadeo, F. et al. Delay-Dependent Stability and \(H_{\infty }\) Performance of 2-D Continuous Systems with Delays. Circuits Syst Signal Process 37, 5333–5350 (2018). https://doi.org/10.1007/s00034-018-0839-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-018-0839-z