
Abstract
We explore the robust tracking problem for nonholonomic wheeled mobile robots (WMR) in the presence of uncertainties. The kinematics of the WMR are represented in the Takagi–Sugeno fuzzy form without modeling error. Recognizing the inherent challenge of obtaining a discrete-time model for time-triggered sampled-data controller design, we adopt an event-triggered sampled-data controller. The designed controller guarantees notable \(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) disturbance attenuation performance and robustness against norm-bounded parametric uncertainties, excluding the Zeno phenomenon in the event triggering. Results of the case study about the WMR model demonstrate the efficacy of the proposed methodology.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction The aging of the agroforestry workforce, combined with the ongoing trend of urbanization, prompts significant concerns about a food shortfall soon. Mitigating the resultant workforce imbalance requires the implementation of mechanization in agroforestry processes, with autonomous wheeled mobile robots (WMR) emerging as a promising solution [21]. For example, WMRs can implement changeable transport paths, overcoming the limitations associated with fixed conveyor belts [16]. In this scenario, the primary objective of a WMR, viewed through the lens of control engineering, is cast as a nonlinear tracking control problem.
The authors of [13] developed an adaptive sliding mode control approach for a WMF with uncertainties. In [14], they further deliberated the (electric) actuator dynamics in adaptive controller design for WMRs. In [10], the authors addressed the trajectory tracking problem for a WMR, using the extended Kalman filter to observe disturbances along nonlinear dynamics. A sliding mode control for path-tracking unmanned agricultural vehicles with adaption laws was presented in [2]. These endeavors underscore that most control techniques for WMRs rely on variable structures or adaptive mechanisms.
Takagi–Sugeno (T–S) fuzzy model-based strategy is well recognized as an efficient solution for nonlinear control systems [6, 7, 9], including WMRs. Sun et al. [15] proposed a continuous-time T–S fuzzy control design for WMR with visual odometry. This paper continues these efforts to develop a sampled-data approach for WMRs with disturbances and uncertainties using the T–S framework. The focal points of consideration are twofold: (i) disturbance attenuation and (ii) sampled-data burden.
(i) While WMRs conventionally assume pure rolling of wheels, local floor irregularities may cause a slip, which can be identified by \(\mathcal {L}_{2}\) disturbances. The driving task of a WMR is, therefore, defined as the energy-to-peak disturbance attenuation problem in trajectory tracking. In [1], the robust energy-to-peak filtering problem for uncertain continuous-time T–S fuzzy models was studied. In [18], a continuous-time energy-to-peak output-tracking controller was developed for nonlinearly perturbed systems. However, few research efforts are found devoted to the \(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) disturbance attenuation problem for WMRs.
(ii) Given the prevalence of low-cost digital microprocessors for driving electric actuators, discrete-time model-based sampled-data control methodologies have become imperative. However, deriving an exact discrete-time model for a WMR proves often unattainable due to the nonlinear nature of the initial value problem [8]. In [4], a predictive control technique was examined, where an approximate discrete-time error posture model of a WMR was used; thereby, actual performance may be degraded. Fast sampling is essential for preventing the performance degradation of sampled-data control. However, it significantly strains the network bandwidth and computing capability of the microprocessor. The event-triggered—rather than the ordinary fixed time-triggering—control (ETC), which changes the control input only when a specific event occurs, can be a resolution [3]. Previous work [11] polished an ETC scheme with a nonlinear sliding mode control technique for WMRs, validating the theoretical development through experimentation.
This paper offers a robust fuzzy sampled-data ETC approach for path tracking of uncertain nonholonomic WMRs that achieves energy-to-peak disturbance attenuation. The kinematic model of a nonlinear WMR is represented in the T–S fuzzy form with no modeling errors. The suggested scheme analyzes closed-loop stability in the continuous-time domain, hence removing the need for a discrete-time model of a WMR. The design condition is stated in terms of linear matrix inequalities and ensures the Zeno-free behavior of the event triggering. A numerical example of a WMR demonstrates the efficacy of the proposed method.
Notation: The index set is defined as \(\mathcal {I}_{R}:=\{1,\dots ,r\}\subset \mathbb {N}\). \(\mathcal {I}_{J}\times \mathcal {I}_{R}\) denotes all pairs \((i,j)\in \mathcal {I}_{R}\times \mathcal {I}_{R}\) such that \(1\leqslant i<j\leqslant r\). The shorthand \(\textrm{He}\left\{ X\right\} :=X+X^{\textrm{T}}\) is adopted, and the transposed element in symmetric positions is denoted by \(*\).
1 Kinematics of a WMF and its T–S Fuzzy Modeling
For a mechanical kinematics with the n-dimensional generalized coordinates q, the m nonholonomic independent constraints can be expressed as:
where \(A(q):\mathbb {R}^{n}\rightarrow \mathbb {R}^{m\times n}\) is a function matrix with full row rank. For \(n-m\) linear independent vector fields \(s_{i}(q)\) that comprise the basis for the nullspace of A(q), we obtain
Then, there exists a velocity vector \(p\in \mathbb {R}^{n-m}\) [13, 19] such that
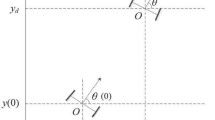
In this study, as shown in Fig. 1, we consider a two-wheeled mobile robot whose posture is represented by the generalized coordinate \(q:=(x,y,\phi )\in \mathbb {R}^{3}\) in the world X–Y frame. In this case, (x, y) is the Cartesian coordinates of the center of mass of the vehicle, and \(\phi \) is the counterclockwise angle between the heading direction and the X-axis.

The posture of WMR
Assumption 1
([19]) The WMR purely rolls and does not slip in a lateral direction.
Assumption 1 poses a nonholonomic restriction in which the velocity in the lateral direction of a WMR is null, which is represented by
Two vector fields, \(s_{1}=(\cos (\phi ), \sin (\phi ), 0)\) and \(s_{2}=(0, 0, 1)\) are linearly independent and lie in the nullspace of A(q). We define \(p:=(v, \omega )\), where v represents the linear velocity in the heading direction and \(\omega \) denotes the angular velocity. The kinematics model is constructed as
The reference posture \(q_ {\textrm{r}}:=(x_{\textrm{r}},y_{\textrm{r}},\phi _{\textrm{r}})\) that the WMR is to follow is subject to
where \((v_{\textrm{r}},\omega _{\textrm{r}})=:p_{\textrm{r}}\) is a reference velocity vector.
The error posture (i.e. the tracking error with respect to the frame of the WMR defined as the Cartesian coordinate system with an origin of (x, y) and X-axis in the direction of \(\phi \)) is calculated by
Considering Eq. 1, the dynamic behavior of Eq. 3 is represented as follows:
We take p in the form of
Overall, the nonlinear error-posture model of a WMR is constructed as follows:
The four nonlinear parameters that appeared in Eq. 5 can be expressed by the following convex combinations:
Using the sector nonlinearity technique [5], we solve these equations to obtain:
where \(a_{j}^{i}\), \((i,j)\in \mathcal {I}_{2}\times \mathcal {I}_{4}\) are determined as follows:
We set \(z:=\left( \omega _{\textrm{r}},\frac{v_{\textrm{r}}\sin (e_{\phi })}{e_{\phi }},e_{y},e_{x}\right) \in \mathbb {R}^{4}\) as the premise variables for the T–S fuzzy model of Eq. 5. If the membership function \(\varGamma _{j}^{i}\) of \(z_{j}\) in the ith fuzzy inference rule is set as follows:
the following state equation
is the modeling error-free T–S fuzzy model for Eq. 5 on the domain \([a_{1}^{1},a_{1}^{2}]\times [a_{2}^{1},a_{2}^{2}]\times [a_{3}^{1},a_{3}^{2}]\times [a_{4}^{1},a_{4}^{2}]\subset \mathbb {R}^{4}\), where
and
where
2 Robust \(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) ETC Design
To strengthen the robustness to uncertainties and disturbances attenuation performance in design, we modify (6) as follows:
where \(\varDelta A_{i}\) denotes the system uncertainty and \(z\in \mathbb {R}\) is the performance output.
With a slight abuse of notation, the Lebesgue space \(\mathcal {L}_{p}^{n}[0,\infty )\) of measurable functions \(f:[0,\infty )\rightarrow \mathbb {R}^{n}\) satisfies
where the following conventional vector r-norm is adopted [12]:
In this study, we consider a continuous-time disturbance \(w\in \mathcal {L}_{2,2}^{p}\) and a continuous-time performance output \(z\in \mathcal {L}_{\infty ,2}^{q}\) (simply denoted as \(\mathcal {L}_{2}\) and \(\mathcal {L}_{\infty }\), respectively). In addition, their norms \(\left\| w\right\| _{\mathcal {L}_{2,2}^{p}}\) and \(\left\| z\right\| _{\mathcal {L}_{\infty ,2}^{q}}\) are denoted by \(\left\| w\right\| _{2}\) and \(\left\| z\right\| _{\infty }\), respectively.
Assumption 2
There exist known compatible constant matrices D and E and an unknown time-varying diagonal matrix \(\varDelta \) satisfying \(\varDelta ^{\textrm{T}}\varDelta \preccurlyeq I, \forall t\in \mathbb {R}_{\geqslant 0}\) such that
Lemma 1
([17]) Given compatible matrices D, E, \(S=S^{\textrm{T}}\), with \(\varDelta \ni \varDelta ^{\textrm{T}}\varDelta \preccurlyeq I\), there exists \(\epsilon \in \mathbb {R}_{>0}\) such that
Lemma 2
([9]) Given compatible matrices D, \(Q=Q^{\textrm{T}}\succ 0\), \(S=S^{\textrm{T}}\), the following equivalence is true:
We employ the following event-triggered aperiodic sam-pled-data controller:
where \(t_{k}\), \(k\in \mathbb {Z}_{\geqslant 0}\) represents the time at which the control input is updated and \(\theta _{i_{k}}:=\theta _{i}(z(t_{k}))\). The subsequent execution time \(t_{k+1}\) is determined by the following event-triggering mechanism:
where \(\epsilon _{e}:=e(t_{k})-e\), \(\sigma \in \mathbb {R}_{>0}\) is a given threshold, and P is a positive definite matrix.
The problem of interest is expressed as follows:
Problem 1
Find \(K_{i}\) such that the uncertain fuzzy model (7) closed by the aperiodic sampled-data controller (8) updated by the event-triggering mechanism (9) exhibits the following \(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) disturbance attenuation performance
and is robustly asymptotically stable against the norm-bounded parametric uncertainties when \(w=0\).
The close-loop system of Eqs. 7, 8, and 9 is constructed as
for \(t\in [t_{k},t_{k+1})\). Similar to [20], we introduce the following relation about the asynchronous firing strengths
and suppose the existence of \(\underline{\rho },\overline{\rho }\in \mathbb {R}_{>0}\) such that
Then, it straightforwardly follows that
The following theorem proposes a design condition for Problem 1.
Theorem 1
Given \(\gamma \), \(\kappa _{i}\), \(\lambda \), \(\sigma \), \(\underline{\rho }\), and \(\overline{\rho }\), the uncertain fuzzy model (7) closed by the aperiodic sampled-data controller (8) updated by the event-triggering mechanism (9) (i) exhibits the \(\gamma \)-\(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) disturbance attenuation performance (10) and (ii) is implementable if there exist \(M_{i}\), \(Q=Q^{\textrm{T}}\succ 0\) such that
where
In this case, the gain is given by \(K_{i}=M_{i}Q^{-1}\).
Proof
(i) To prove stability, we define \(V:=e^{\textrm{T}}Pe\) with \(P=P^{\textrm{T}}\succ 0\). The time derivative of V is computed as
for \(t\in [t_{k},t_{k+1})\). Using Eq. 9, we can majorize
where
Define
where one knows that \(\eta _{1},\eta _{2}\in \mathbb {R}_{[0,1]}\) and \(\eta _{1}+\eta _{2}=1\). Applying a similarity transformation with \(\textrm{diag}(Q^{-1},I,I,I)\), Lemmas 1 and 2, and Assumption 2 to Eqs. 14 and 15 and denoting \(Q^{-1}=P\) and \(M_{i}=K_{i}Q\) results in
Similarly, it holds that Eq. 13\(\implies \bar{\varXi }_{ii}\prec 0\). As a result
By the comparison lemma, we know that
Next, performing a similarity transformation with \(\textrm{diag}(P^{-1},\) \(I)\) and applying Lemma 2 to Eq. 16, we derive
Then, we arrive at
When \(w=0, \forall t\in \mathbb {R}_{>0}\), Eq. 17 can be expressed as \(\dot{V}+\lambda V<0 \Longrightarrow \dot{V}<0\). Therefore, Eq. 11 is robustly asymptotically stable.
(ii) To demonstrate the implementability of Eq. 8, we investigate the existence of a nonzero lower bound of the minimum event-triggering interval in Eq. 9. Because \(e(t_{k})\) is a constant for any interval \([t_{k},t_{k+1})\), we construct
and we derive the following differential inequality:
where
Because of \(\epsilon _{e}(t_{k})=0\), the comparison lemma yields
Solving the inequality, we obtain
where \(c_{1},c_{2},c_{3}\) are positively finite. Therefore, for any \(k\in \mathbb {Z}_{\geqslant 0}\), \(t_{k+1}-t_{k}>0\). This completes the proof. \(\square \)
3 A Numerical Example
The parameters for Eq. 6 are set as follows:
In addition, we introduce the following uncertainty, the disturbance, and the controlled output for Eq. 7, parameterized as
where \(\delta \ni \left| \delta \right| \leqslant 1\) randomly varies over time. According to Assumption 2, \(\varDelta A_{i}\) is decomposed as

Time responses of the closed-loop error posture of the WMR

Energy-to-peak disturbance attenuation performance: \(\sqrt{e^{\textrm{T}}(0)Pe(0)}+\gamma \left\| w\right\| _{2}\) (dashed (red)) and \(\left\| z\right\| _{\infty }\) (solid (blue))

Time responses of firing strengths: \(\theta _{i}\) (dashed-red), \([\underline{\rho }\theta _{i},\overline{\rho }\theta _{i}]\) (filled-light red), \(\theta _{k_{i}}\) (solid-blue)
For Problem 1, the following \(\mathcal {L}_{2}\) disturbance
is considered.
Let \(\gamma = 0.5\), \(\kappa _{i}=0.1\), \(\lambda = 0.05\), \(\sigma = 0.05\), \(\underline{\rho }=0.4\), and \(\overline{\rho }=2\). The following controller gains are obtained through Theorem 1

Event-triggered aperiodic sampled-data control inputs
(i) Reference velocities are set as
to generate the reference trajectory (dash-red) for Eq. 2 with \(q_{\textrm{r}}(0)=(5,0,0)\) shown in the lower-right subfigure of Fig. 2. It is also shown that the controlled trajectory (solid-blue) with \(q(0)=(5.1.0.1,0)\) is accurately directed to the reference trajectory. The other subfigures in Fig. 2 depict the closed-loop time responses of Eqs. 5, 8, 9, where all the error posture variables are well bounded in the presence of the \(\mathcal {L}_{2}\) disturbance and parametric uncertainties. As shown in Fig. 3, \(\left\| z\right\| _{\infty }\) is smaller than \(\sqrt{e^{\textrm{T}}(0)Pe(0)}+\gamma \left\| w\right\| _{2}\) for all \(t_{f}\in \mathbb {R}_{\geqslant 0}\), implying the proposed controller satisfies the \(\mathcal {L}_{2}\)–\(\mathcal {L}_{\infty }\) disturbance attenuation performance in Eq. 10 over the entire simulation time horizon. It is visible from Fig. 4 that every \(\theta _{i_{k}}\) (solid-blue) is present between the interval \([\underline{\rho }\theta _{i},\overline{\rho }\theta _{i}]\) (filled-light red). Hence, Eq. 12 holds.

Event-triggering instants and intervals
(ii) Figure 5 illustrates the ETC inputs for Eq. 8, where the control inputs are piecewise-constant but their time intervals are uneven. Figure 6 depicts the event-triggering interval versus the event-triggering instant. The discrete-time signal does not converge to zero, indicating that the proposed controller operates well in a sampled-data manner without the Zeno behavior affecting the sampling process. Thus, the proposed controller is implementable. In summary, Problem 1 is solved.
4 Conclusions
Leveraging the T–S fuzzy technique, this paper tackled the sampled-data nonlinear tracking control problem in WMRs. It is stressed that (i) the energy-to-peak disturbance attenuation was taken into consideration; and (ii) the ETC technique was adopted to overcome the unavailability of the exact discrete-time model of a WMR dynamics. The numerical example demonstrated the efficacy of the proposed method, highlighting its potential to enhance the performance of autonomous agricultural vehicles and contributing valuable insights to the field of agroforestry automation.
Change history
09 May 2024
A full-stop has been added at the end of an equation on page 2
References
Chang XH, Park JH, Shi P (2017) Fuzzy resilient energy-to-peak filtering for continuous-time nonlinear systems. IEEE Trans Fuzzy Syst 25(6):1576–1588. https://doi.org/10.1109/tfuzz.2016.2612302
Ge Z, Man Z, Wang Z, Bai X, Wang X, Xiong F, Li D (2023) Robust adaptive sliding mode control for path tracking of unmanned agricultural vehicles. Comput Electr Eng 108(108):693. https://doi.org/10.1016/j.compeleceng.2023.108693
Jee SC, Lee HJ (2023) Positive sampled-data disturbance attenuation: separate design. Journal of Electrical Engineering & Technology. https://doi.org/10.1007/s42835-023-01637-2
Klančar G, Škrjanc I (2007) Tracking-error model-based predictive control for mobile robots in real time. Robot Auton Syst 55(6):460–469. https://doi.org/10.1016/j.robot.2007.01.002
Lee HJ (2022) Robust static output-feedback vaccination policy design for an uncertain SIR epidemic model with disturbances: positive Takagi-Sugeno model approach. Biomed Signal Process Control 72(Part A):103,273. https://doi.org/10.1016/j.bspc.2021.103273
Lee HJ (2023) Positivity and separation principle for observer-based output-feedback disturbance attenuation of uncertain discrete-time fuzzy models with immeasurable premise variables. J Franklin Inst 360(12):8486–8505. https://doi.org/10.1016/j.jfranklin.2023.03.047
Lee HJ (2023) Robust observer-based output-feedback control for epidemic models: positive fuzzy model and separation principle approach. Appl Soft Comput 132:109,802. https://doi.org/10.1016/j.asoc.2022.109802
Lee HJ, Kim DW (2016) Performance-recoverable intelligent digital redesign for fuzzy tracking controllers. Inf Sci 326:350–367. https://doi.org/10.1016/j.ins.2015.08.003
Lee HJ, Park JB, Chen G (2001) Robust fuzzy control of nonlinear systems with parametric uncertainties. IEEE Trans Fuzzy Syst 9(2):369–379. https://doi.org/10.1109/91.919258
Li L, Wang T, Xia Y, Zhou N (2020) Trajectory tracking control for wheeled mobile robots based on nonlinear disturbance observer with extended Kalman filter. J Franklin Inst 357(13):8491–8507. https://doi.org/10.1016/j.jfranklin.2020.04.043
Nath K, Yesmin A, Nanda A, Bera MK (2021) Event-triggered sliding-mode control of two wheeled mobile robot: an experimental validation. IEEE J Emerg Sel Top in Industrial Electronics 2(3):218–226. https://doi.org/10.1109/jestie.2021.3087965
Palhares RM, Peres PL (2000) Robust filtering with guaranteed energy-to-peak performance—an \(\mathscr {L}\)\(\mathscr {M}\)\(\mathscr {I}\) approach. Automatica 36(6):851–858. https://doi.org/10.1016/S0005-1098(99)00211-3
Park BS, Yoo SJ, Park JB, Choi YH (2009) Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty. IEEE Trans Control Syst Technol 17(1):207–214. https://doi.org/10.1109/TCST.2008.922584
Park BS, Yoo SJ, Park JB, Choi YH (2010) A simple adaptive control approach for trajectory tracking of electrically driven nonholonomic mobile robots. IEEE Trans Control Syst Technol 18(5):1199–1206. https://doi.org/10.1109/tcst.2009.2034639
Sun CH, Chen YJ, Wang YT, Huang SK (2017) Sequentially switched fuzzy-model-based control for wheeled mobile robot with visual odometry. Appl Math Model 47:765–776. https://doi.org/10.1016/j.apm.2016.11.001
Wang Q, He J, Lu C, Wang C, Lin H, Yang H, Li H (2023) Wu Z (2023) Modelling and control methods in path tracking control for autonomous agricultural vehicles: a review of state of the art and challenges. Appl Sci 13(12):7155. https://doi.org/10.3390/app13127155
Xie L (1996) Output feedback \({H}_{\infty }\) control of systems with parameter uncertainties. Int J Control 63(4):741–750. https://doi.org/10.1080/00207179608921866
Xie X, Lam J, Fan C, Wang X, Kwok KW (2022) Energy-to-peak output tracking control of actuator saturated periodic piecewise time-varying systems with nonlinear perturbations. IEEE Trans Syst Man Cybern: Systems 52(4):2578–2590. https://doi.org/10.1109/tsmc.2021.3049524
Yang JM, Kim JH (1999) Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots. IEEE Trans Robot Autom 15(3):578–587. https://doi.org/10.1109/70.768190
Zhang J, Peng C (2015) Event-triggered \({H}_{\infty }\)filtering for networked Takagi–Sugeno fuzzy systems with asynchronous constraints. IET Signal Proc 9(5):403–411. https://doi.org/10.1049/iet-spr.2014.0319
Zhu Z, Chen J, Yoshida T, Torisu R, Song Z, Mao E (2007) Path tracking control of autonomous agricultural mobile robots. Journal of Zhejiang University-SCIENCE A 8(10):1596–1603. https://doi.org/10.1631/jzus.2007.A1596
Acknowledgements
This work was supported by Inha University Research Grant.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jee, S.C., Lee, H.J. Robust Event-triggered Fuzzy Energy-to-peak Disturbance Attenuation for Wheeled Mobile Robots. J. Electr. Eng. Technol. (2024). https://doi.org/10.1007/s42835-024-01893-w
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42835-024-01893-w