
Abstract
Background
Rising from a sitting position, or “sit-to-stand” (STS), is one of the basic activities in daily life. Therefore, studying the kinematics and kinetics of STS could help optimize STS movement strategy. This study analyzes the comprehensive influence of the handrail and foot position under the knee joint support on STS kinematics and kinetics.
Methods
A total of 30 young people were recruited to participate in this study. Their average age, height, weight, and BIM were 24.21 years old, 168.52 cm, 60.92 kg, and 21.46 kg/m2, respectively. The experiment was conducted under six experimental conditions. Total movement time, percent of movement time of each phase, trunk tilt angle, and peak joint moment were analyzed and compared. In addition, a correlation analysis was carried out between the range of motion of the joint angle and the peak joint moment.
Results
The results showed that the far handrail had the largest trunk tilt angle, and the smallest total moment impulse of the lower limb joints. The closer the foot was to the seat, the smaller the peak hip joint moment, and the larger the peak moment of ankle and knee joints, and a shorter total movement time.
Conclusions
The position of the handrail had a significant influence on the trunk tilt angle, percent of movement time of certain phase, and the total moment impulse of the lower limb joints. And the position of the foot had a significant influence on the peak moments of the ankle, hip, and knee joints.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The ability to stand up from a sitting position, or “sit-to-stand” (STS), is a basic requirement for humans to maintain a high-quality life. STS not only frequently occurs in daily life but is also used in physical therapy (Hirata et al. 2008; Sanford et al. 1995). However, STS is a biomechanically challenging activity that requires sufficient muscle strength to meet the needs of each lower-limb joint moment as well as balance to ensure stability when sitting to standing to avoid falling (Lee et al. 2019; Sekiguchi et al. 2020). It is difficult for people with lower-limb disorders to complete this task independently.
Handrails can reduce the load on the joints of the lower limbs, improve the stability of STS movement, and make it easier for people with lower-limb disorders to complete the STS task (McIntosh and Vallis 2021). Reducing the distance from the foot to the edge of the seat can shorten the distance from the center of gravity to the foot, thereby reducing the displacement of the center of gravity in the anterior-posterior (AP) direction during STS, making the STS task easier (Mathiyakom et al. 2005). To help people with lower-limb disorders complete the STS movement, handrails and changing the distance between the foot and the edge of the seat could be used to help them complete STS tasks successfully (Gillette and Stevermer 2012; Takeda et al. 2009).
Many articles have studied the role of handrails in STS movement. Chihara et al. (Chihara et al. 2015) found that increasing the distance from the handrail to the edge of the seat resulted in larger trunk flexion, greater forward movement of the body’s center of gravity, and ankle dorsiflexion. Chihara et al. compared the total load of the lower limb joints of different handrail heights and found that the best height position of the handrail was 574 mm higher than the chair surface. O’Meara and Smith (O'Meara and Smith 2006) found that the use of a unilateral handrail to assist STS movement would cause an asymmetry of the movement on both sides of the body. Dekker et al. (Dekker et al. 2007) used a subjective investigation to study whether the subjects prefer a vertical or horizontal handrail and found that subjects prefer vertical handrail. Dekker et al. also studied the distance between the vertical handrail and the edge of the seat and found that the optimal distance was 338 mm. Kinoshita et al. (Kinoshita 2012; Kinoshita et al. 2015) studied the influence of handrail height on the kinematics and kinetics of STS. Compared with no handrail, Kinoshita et al. found that the use of handrails could effectively reduce the total moment of the lower limb joints. Kato et al. (Kato et al. 2020) compared the effects of curved and vertical handrails on STS movement and found that a curved handrail had greater handrail reaction force. The above literature separately studied the position and type of handrail in STS movement. However, most studies have investigated unilateral handrails, and there is a lack of quantitative data on bilateral handrails.
To find the most appropriate initial posture, many papers have studied the influence of changing the initial position of the foot on the kinematics and kinetics of STS. For example, Gillette and Stevermer and Blache et al. (Gillette and Stevermer 2012; Blache et al. 2014) studied the AP positions of the foot and found that when the foot was far away from the seat, the moment of the hip joint became larger, and the moment of the ankle joint became smaller. When the foot was closer to the seat, the hip joint moment became smaller, and the ankle joint moment increased. Fleckenstein et al. (Fleckenstein et al. 1988) studied different initial knee angles and reached the same conclusion. Based on an analysis of the above literature, we understand that the position of the foot could affect the joint moment of the lower limbs.
STS assist devices could help people with lower-limb disorders complete STS tasks. Many STS assist devices are equipped with knee joint support; thus, a support force is added to the knee joint during STS, which could make the STS task easier and increase the stability of the STS task. However, there is a lack of quantitative analysis on knee joint support.
Existing literature has examined either the handrail or the initial position of the foot alone. To the best of our knowledge, no researchers have studied the comprehensive influence of the AP positions of the handrail and foot during STS movement. In addition, there is a lack of research on the influence of knee joint support on STS movement. For knee joint support, the comprehensive influence of the AP positions of the handrail and foot on the kinematics and kinetics of the STS is still unclear, and there are less relevant kinematics and kinetics quantitative data. Therefore, this study investigates the comprehensive influence of the position of the handrail and foot position under the knee joint support on STS kinematics and kinetics. Relevant kinematic and kinetics quantitative data is assessed to determine the optimal STS movement strategy. Results could provide a starting point for the design and control of STS assistance devices.
We first hypothesized that the closer the foot is to the seat, the smaller the hip joint moment and the greater the ankle joint moment would be. Second, we hypothesized that the farther the handrail is from the knee joint support, the greater of the trunk tilt angle would be. Finally, we hypothesized that the farther the handrail is from the knee joint support, the easier the STS movement would be.
Method
Subjects
A total of 30 adults were recruited for this study, including 15 men and 15 women. The information of the selected subjects is shown in Table 1. The inclusion criterion was that the selected subjects can complete the STS task without any help. The following were exclusion criteria: those with musculoskeletal mobility problems; neurological disease; sensory, visual, auditory, or cognitive impairments; or who had undergone any major orthopedic surgery. The study was conducted from March 1 to March 10, 2021 and was approved by the Academic Ethics and Scientific Ethics Committee of the Academic Committee of Tianjin University of Science and Technology. All subjects signed an informed consent form prior to participating.
Instrumentation and data acquisition
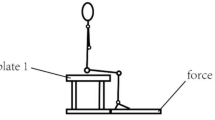
A high-definition camera (EOS 200D II, 1920 × 1080 pixel, 60 fps Canon) was used to collect human kinematics data in the sagittal plane during STS, as shown in Fig. 1. When using cameras for kinesiology data collection, the requirement for the position of the camera is to be able to photograph the whole body of the subject, and under this premise, according to the height and size of the 30 subjects, after experimental testing, the camera was selected to be placed at a distance of 1.6 m from the subject. The height of the chair was established as the average knee height (400 mm) of the 50th percentile of adult males and females (GB/T10000-88 Human dimensions of Chinese adults S 1988). The height of the handrail was set as the height of the subject’s shoulder joint when sitting. The handrail width was set as the width of each subject’s shoulder. Two force plates were installed on the chair and under the subject’s foot to measure the reaction force of the human buttocks and the foot. Each force plate included adjustable anchor bolts, two 700 × 500 mm stainless steel plates with a thickness of 5 mm, and four force sensors (GJBHX-III/50 kg, QISHENG, Bengbu, China). The force sensor sampling frequency was 80 Hz. The four force sensors were distributed on the four corners of the stainless-steel plate. A thin-film pressure sensor (MD30-60, Leanstar, Suzhou, China) was installed on the knee support to measure the pressure on the knee, and the thin-film pressure sensor sampling frequency was 20 Hz.

Experimental setup
Protocol
As shown in Fig. 2, we designed six kinds of experimental conditions, namely, two foot positions at three handrail distances. The foot position closer to the seat was labeled (C), and the foot farther away from the seat with the shank vertical to the ground was labeled (A). Three distances from the handrail to the knee joint support were assessed. The near handrail (D0), middle handrail (D100), and far handrail (D200) corresponded to the distance between the handrail and the knee joint support in the sagittal plane of 0, 100 mm, and 200 mm, respectively.

Diagram showing six experimental conditions
Before the experiment, markers were pasted on the ankle, knee, hip, and shoulder joints on the right side of the subject’s body. The subjects were required to wear black tights to prevent the shaking of fat from affecting the accuracy of the markers during STS. The subjects were asked to sit on a seat with a fixed height. The distance between the foot in the transverse plane was chosen by the subjects, the knees were tightly attached to the knee joint support, and the hands grabbed the handrails.
During the experiment, the high-definition camera, two force plates, and the thin-film pressure sensor were activated sequentially after the subject sat down, so that they started sampling first. Four seconds later, a “prepare, start” instruction was issued, and the subject grabbed the handrail with both hands and stood up from the seat at a speed of choice. When completing the STS, the subject was issued an instruction to “stop,” at which time each device stopped recording data.
Data analysis
We used a high-definition camera to sample the images of the subjects’ STS movements on the sagittal plane, then used Adobe Photoshop 2018 (Adobe Systems Software Ireland Ltd) to extract each frame of the image. Using the ankle marker as the coordinate origin, a Cartesian coordinate system was established to obtain the pixel position coordinates of the knee, hip, and shoulder joint. The actual position coordinates of the joints were obtained through calibration. After continuous processing, the trajectories of the knee, hip, and shoulder joint were obtained.
To perform kinematic analysis, we established a link segment model of the human body in the sagittal plane, as shown in Fig. 3. The model used the ankle joint as the origin and an OXY coordinate system (AP direction is X, and vertical direction is Y) consistent with the coordinate system established when we obtained kinematic data through image processing. The model included foot, shank, thigh, and trunk (including head). The absolute angles of the shank, thigh, and trunk to the horizontal axis of the coordinate system represented the ankle (θ1), knee (θ2), and hip (θ3) joint angles. The absolute angle between the trunk and the Y-axis of the coordinate system represented the trunk tilt angle (θ4). The angles of the ankle, knee, and hip joints were calculated according to the actual position coordinates of the adjacent joints. Meanwhile, the velocity, acceleration, angular velocity, and angular acceleration of each joint were calculated by the finite difference method. All kinematics and kinetics data were normalized to time, that is, the movement started at 0%T and ended at 100%T.

Link segment model of the human body in the sagittal plane
The plantar force plate is equipped with four force transducers. When processing the value of the sensor, when the value of the existing point is obviously unreasonable, this set of data is discarded, and the data under this condition is remeasured. According to the principle of force balance, the plantar reaction data is obtained through the data of four groups of force sensors, and then, the cubic spline interpolation algorithm is used to smooth the data of the plantar reaction.
We calculated the center of pressure (COP) according to the ground reaction force (Frykberg and Häger 2015; Yamako et al. 2017), using the position fluctuation of the COP in the AP directions to determine the beginning of the STS movement. Before the subjects began their STS movement, the position of their COP fluctuated in a certain range. We used data of the first second of the COP to calculate the confidence interval of the COP when the subject was in a stable state according to mean ± 5σ (Akram and McIlroy 2011). When starting from a certain moment, if the COP position was not within the confidence interval for 0.2 s, we defined this moment as the start time of the STS movement. We used the time when the angle of the hip joint reached its maximum value for the first time as the end of the STS. In this way, the collected data was filtered, and the data from the beginning of the motion to the end of the motion was selected for subsequent analysis. Due to the different sampling frequencies of the force plate, the thin-film pressure sensor, and the high-definition camera, we performed spline fitting on the STS kinematics, foot reaction force, and knee joint reaction force data. Referring to the sampling frequency of the force plate and pressure sensor, the spline interpolation of the values at a frequency of 60 Hz was selected to obtain the data required to calculate the lower limb joint moment. The joint moments of the lower limbs were calculated using the Newton–Euler method.
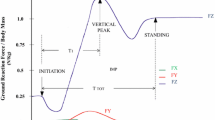
We divided the STS into four phases, as shown in Fig. 4: phase I, the flexion momentum phase (T0–T1); phase II, the momentum transfer phase (T1–T2); phase III, the extension phase (T2–T3); and phase IV, the stabilization phase (T3–T4). In that, the time and performance of phase IV varied among different individuals, and this study focused on the data of the first three phases, excluding the data of phase IV.

Three phases of STS movement
Statistical analysis
We performed a normality test on the data. Through a Shapiro–Wilk test, it was found that our data were in a normal distribution. SPSS 17.0 was used for data analysis, and the significance level was p < 0.05. The influence of the position of the handrail and the foot on the total movement time, percent of movement time of each phase, trunk tilt angle, range of motion of joint angle, and the moment was evaluated using two-way repeated-measure analysis of variance. Subsequently, a least significant difference (LSD) post hoc test was performed. A Pearson correlation analysis was used to analyze the correlation between the range of motion of the joint angle and joint moment.
Results
Movement time
We compared the total movement time and the percent of movement time of each phase under the six experimental conditions, as shown in Fig. 5 and Table 2. We found that the position of the foot had a significant influence on the total movement time (p < 0.05). Moreover, the position of the handrail had no significant influence on the total movement time (p = 0.839), and there was no interaction between the position of the handrail and the position of the foot. However, the position of the handrail had a significant influence on the percent of movement time in phase I and phase III (p = 0.023, p = 0.002). The position of the handrail had no significant influence on the percent of movement time in phase II. In addition, the foot position had no significant influence on the percent of movement time in phases I, II, and III (p = 0.722, p = 0.233, p = 0.576, respectively).

Total movement time and percent of movement time of each phase. *A significant difference between the positions of the two feet (p < 0.05). a Average and standard deviation of total movement. b Percent of movement time of each phase under different time in different experimental conditions
Trunk tilt angle and range of motion of joints
As shown in Table 2, we listed the trunk tilt angle as well as the range of motion of the ankle, knee, and hip joint angles during STS. The position of the handrail and the foot both had a significant influence on the trunk tilt angle (handrail: p < 0.05, foot: p < 0.05). After the LSD post hoc test, we found that there was a significant difference in the trunk tilt angle between the near and middle handrails (p < 0.05) and noted a significant difference between the near and far handrails (p < 0.05). However, there was no significant difference in the trunk tilt angle under the conditions of the middle and far handrails (p > 0.05). The position of the handrails and the foot had no interaction with the trunk tilt angle (p > 0.05).
In addition, we noted that the position of the handrail had no significant influence on the range of motion of the ankle and knee joint angle (p > 0.05 and p > 0.05, respectively). The position of the handrail, however, had a significant influence on the range of motion of the hip joint angle (p < 0.05). After LSD post hoc test, we found a significant difference in the range of motion of the hip joint angle under the conditions of the near and middle handrails (p < 0.05). A significant difference was observed in the range of motion of the hip joint angle under the conditions of the near and far handrails (p < 0.05). The position of the foot had a significant influence on the range of motion of the ankle, knee, and hip joint angle (p < 0.05, p < 0.05, p < 0.01).
Joint moment
As shown in Table 2 and Fig. 6, we listed the peak moments and standard deviations of the ankle, knee, and hip joints under six experimental conditions. The position of the handrail had no significant influence on the peak ankle joint moment and peak knee joint moment (p = 0.915, p = 0.142) but had a significant influence on the peak hip joint moment (p < 0.05). After the LSD post hoc test, we identified a significant difference in the peak hip joint moment under the conditions of the middle and far handrails (p < 0.05). The position of the foot had a significant influence on the peak moments of the ankle, hip, and knee joints (p < 0.01, p < 0.01, and p < 0.01, respectively).

a–c Peak moments of lower limb joints and standard deviation. *A significant difference between the positions of the two feet (p < 0.05)
The total moment impulse of the lower limb joints was calculated by integrating the total moment of the lower limb joints during STS movement as an index to evaluate the total load (Inai et al. 2018; Winter 1984). As shown in Table 2 and Fig. 7, the position of the foot had no significant influence on the total moment impulse of the lower limb joints (p = 0.262), while the position of the handrail had a significant influence on the total moment impulse of the lower limb joints (p < 0.05).

Total moment impulse of lower limb joints. *A significant difference between the positions of the three handrails (p < 0.05)
Correlation analysis
We performed a correlation analysis on the range of motion of each joint angle and the peak moment of each joint. The range of motion of the ankle joint angle was positively correlated with the ankle joint moment (p < 0.01, correlation coefficient: 0.328). Furthermore, the range of motion of the knee joint angle was positively correlated with the knee joint moment (p = 0.004, correlation coefficient: 0.227). We also found that the range of motion of the hip joint angle was positively correlated with the hip joint moment (p < 0.01, correlation coefficient: 0.512).
Discussion
This study aimed to investigate the influence of the position of the handrail and the position of the foot under the knee joint support on STS kinematics and kinetics. We conducted an experiment in six different conditions. The results showed that the position of the handrail had a significant influence on the trunk tilt angle, percent of movement time of phase I and phase III, and the total moment impulse of the lower limb joints. We also found that the position of the foot had a significant influence on the total movement time, and the peak moment of each joint. At the same time, according to the correlation analysis, we also found that the change range of the angle of each joint of the lower limb was positively correlated with the peak torque of each joint of the lower limb.
The position of the handrail influenced the trunk tilt angle. As shown in Table 2, under the different foot positions, the trunk tilt angle was the smallest at the near handrail (13°), and there was little difference between the middle handrail (17°) and the far handrail (18°). The reason might be that when the trunk was close to the handrail, the handrail could restrict the movement of the shoulder joint in the AP direction (Chihara et al. 2015); hence, the trunk tilt angle was small. As the distance from the handrail to the knee joint support increased, the subject’s trunk movement space became larger. Whether it was the middle or the far handrail, the subject already had enough range of movement. Therefore, in both cases, there was not much difference in the trunk tilt angle.
The position of the handrail influenced the percent of movement time of phase. As shown in Fig. 5b, regardless of the position of the foot, the percent of movement time from T0 to T2 under the middle handrail condition was the longest (41.5% T). The reason might be that the trunk tilt angle (17°) under the middle handrail condition was greater than the trunk tilt angle (13°) under the near handrail condition. Therefore, the subjects needed more time to complete the forward lean. Under the far handrail condition, there would be a larger trunk tilt angle (18°), but the percentage of movement time of T0 to T2 (40% T) using the far handrail was smaller than the percentage of movement time from T0 to T2 with the middle handrail (41.5% T). This finding was because the change of the trunk tilt angle was 19° under the far handrail condition and 20° under the middle handrail condition. Therefore, the trunk’s range of motion was smaller under the far handrail condition, and the time from T0 to T2 was also relatively small.
The position of the handrail had a significant influence on the total moment impulse of the lower-limb joints, as shown in Fig. 7. The farther away the handrail, the smaller the total moment impulse of the lower joints. The average value of the moment impulse of both foot positions was 1.58 Nms/kg under the far handrail condition. In comparison, the average value of the moment impulse of both foot positions was 1.70 Nms/kg under the middle handrail condition. We believe that the total moment impulse of the lower-limb joints could be used as an index to describe the load of the lower-limb joints during STS movement. Therefore, the above experimental results meant that the STS movement was performed more effortlessly under the far handrail condition.
The position of the foot had a significant influence on the total movement time. As shown in Fig. 5, we compared to the total movement time when the foot was far away from the seat. The total movement time was reduced by 4% when the foot was close to the seat. These results were consistent with the conclusion that Liu et al. (Liu et al. 2016; Rb and Hp 1996) studied the influence of the foot position on the total movement time during free-standing, finding that the closer the foot to the seat, the shorter the total movement time. The reason might be that when the foot is close to the seat, the moving distance of the center of gravity in the AP direction is relatively short, thus shortening the total STS movement time. Our study showed that even with handrail and knee joint support, the total movement time was also relatively short when the foot was close to the seat.
The position of the foot had a significant influence on the peak moment of each joint. As shown in Fig. 6, our findings indicated that when the foot was close to the seat with knee joint support and handrails, the peak hip joint moment was smaller than when the foot was far away from the seat. This was consistent with the conclusion drawn by Fleckenstein et al., Kawagoe et al., and Mathiyakom et al. (Mathiyakom et al. 2005; Fleckenstein et al. 1988; Kawagoe et al. 2000) on the influence of the foot position on the peak hip joint moment without knee support and handrails.
Furthermore, in this study, the peak knee joint moment when the foot was close to the seat was 0.55 Nm/kg, and the peak knee joint moment when the foot was far away from the seat was 0.23 Nm/kg. Therefore, the peak knee joint moment when the foot was far away from the seat is smaller.
Finally, our study showing the peak ankle joint torque when the foot was close to the seat is 0.162 Nm/kg, which was greater than the peak ankle joint torque when the foot was far away from the seat, which is 0.117 Nm/kg. Khemlani (Khemlani et al. 1999) mentioned that the position of the foot could influence the moment of the ankle joint. Gillette and Stevermer (Gillette and Stevermer 2012) also mentioned that the ankle moment was greater when the foot was closer to the seat. This finding is consistent with their conclusion. Overall, although the foot close to the seat reduces the peak moment of the hip joint, it increases the peak moment of the ankle and knee joints. Therefore, for people who have problems with ankle and knee joints, we suggested an STS pattern with the foot far away from the seat.
Meanwhile, according to the study, the range of motion of joint angles was positively correlated with the peak moments of the joints. This finding helped us to judge the magnitude of the moment through the range of motion of joint angles when the moment of the joints of the lower limbs was unclear.
This study had certain limitations. First, all subjects in this study were healthy young adults, so the data obtained could not be directly applied to other populations, such as medical patients and the elderly. Second, only two positions of the foot were involved in our study. Previous studies (Talis et al. 2008) have shown that different foot positions and toe-out angles significantly influence the STS movement. Under the condition of knee joint support and handrails, the influence of more foot positions and toe-out angles on the kinematics and kinetics of STS needs further study. Finally, stabilization is also a key factor related to the success of the STS movement. However, our study did not analyze the changes in the COP and the body’s center of gravity. Further research on the stabilization of STS movement is needed.
In sum, we analyzed the influence of the position of the handrail and foot in the AP direction on STS kinematics and kinetics under knee joint support with the following conclusions. First, among the three handrail positions, the far handrail had the largest trunk tilt angle, and the smallest total moment impulse of the lower limb joints. Second, a foot position close to the seat resulted in a minimum peak hip joint moment, a larger peak joint moment of knee and ankle, and a shorter total movement time. Finally, the range of motion of joint angles was positively correlated with the peak moment of joints.
Data availability
The datasets used and/or analyzed for the current study are available from the corresponding author on reasonable request.
Abbreviations
- STS:
-
sit-to-stand
- AP:
-
anterior-posterior
- LSD:
-
least significant difference
References
Akram SB, McIlroy WE. Challenging horizontal movement of the body during sit-to-stand: impact on stability in the young and elderly. J Mot Behav. 2011;43(2):147–53.
Blache Y, Pairot de Fontenay B, Monteil K. The effects of seat height and foot placement on lumbar spine load during sit-to-stand tasks. Ergonomics. 2014;57(11):1687–95.
Chihara T, Fukuchi N, Seo A. Optimum position and orientation of handrail for sit-to-stand movement. J Adv Mech Des, Sys, Manuf. 2015;9, no. 3:JAMDSM0036–6.
Dekker D, Buzink SN, Molenbroek JF, de Bruin R. Hand supports to assist toilet use among the elderly. Appl Ergon. 2007;38(1):109–18.
Fleckenstein S, Kirby RL, MacLeod D. Effect of limited knee-flexion range on peak hip moments of force while transferring from sitting to standing. J Biomech. 1988;21(11):915–8.
Frykberg GE, Häger CK. Movement analysis of sit-to-stand – research informing clinical practice. Phys Ther Rev. 2015;20(3):156–67.
GB/T10000-88. Human dimensions of Chinese adults S. Beijing: Standards Press of China; 1988.
Gillette JC, Stevermer CA. The effects of symmetric and asymmetric foot placements on sit-to-stand joint moments. Gait Posture. 2012;35(1):78–82.
Y. Hirata, J. Higuchi, T. Hatsukari, and K. Kosuge, "Sit-to-stand assist system by using handrail and electric bed moving up and down," 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, 187-192, 2008.
Inai T, Takabayashi T, Edama M, Kubo M. Relationship between movement time and hip moment impulse in the sagittal plane during sit-to-stand movement: a combined experimental and computer simulation study. Biomed Eng Online. 2018;17(1):48.
Kato T, Sekiguchi Y, Honda K, Izumi SI, Kanetaka H. Comparison of handrail reaction forces between two different handrails during sit-to-stand movement in the elderly. Clin Biomech (Bristol, Avon). 2020;80:105130.
Kawagoe S, Tajima N, Chosa E. Biomechanical analysis of effects of foot placement with varying chair height on the motion of standing up. J Orthop Sci. 2000;5:124–33.
Khemlani M, Carr J, Crosbie W. Muscle synergies and joint linkages in sit-to-stand under two initial foot positions. Clin Biomech. 1999;14(4):236–46.
Kinoshita S. Handrail position and shape that best facilitate sit-to-stand movement. J Back Musculoskelet Rehabil. 2012;25(1):33–45.
Kinoshita S, Kiyama R, Yoshimoto Y. Effect of handrail height on sit-to-stand movement. PLoS One. 2015;10(7):e0133747.
Lee SJ, Mehta-Desai R, Oh K, Sanford J, Prilutsky BI. Effects of bilateral swing-away grab bars on the biomechanics of stand-to-sit and sit-to-stand toilet transfers. Disabil Rehabil Assist Technol. 2019;14(3):292–300.
Liu M, et al. Effects of modified sit-to-stand training on balance control in hemiplegic stroke patients: a randomized controlled trial. Clin Rehabil. 2016;30(7):627–36.
W. Mathiyakom, J. L. McNitt-Gray, P. Requejo, and K. Costa, "Modifying center of mass trajectory during sit-to-stand tasks redistributes the mechanical demand across the lower extremity joints," Clin Biomech (Bristol, Avon)., 20, 1, 105-111, 2005.
McIntosh EI, Vallis LA. Performance during reactive handrail grasping during forward walking by young and older adults with and without prior knowledge of the direction of movement is correlated with grip strength. Exp Gerontol. 2021;151:111386.
O'Meara DM, Smith RM. The effects of unilateral grab rail assistance on the sit-to-stand performance of older aged adults. Hum Mov Sci. 2006;25(2):257–74.
Rb S, Hp K. Some biomechanical consequences of varying foot placement in sit-to-stand in young women. Scand J Rehabil Med. 1996;28:79–88.
Sanford JA, Arch M, Megrew MB. An evaluation of grab bars to meet the needs of elderly people. Assist Technol. 1995;7(1):36–47.
Sekiguchi Y, et al. Effects of shelf bar assistance on kinetic control during sit-to-stand in healthy young and elderly subjects. J Biomech. 2020;106:109822.
Takeda K, Katsuhira J, Takano A. Effects of handrail use during sit-to-stand in the third trimester. Int J Ind Ergon. 2009;39(6):988–94.
Talis V, Grishin A, Solopova I, Oskanyan TL, Belenky VE, Ivanenko Y. Asymmetric leg loading during sit-to-stand, walking and quiet standing in patients after unilateral total hip replacement surgery. Clin Biochem. 2008;23(4):424–33.
Winter D. Kinematic and kinetic patterns in human gait: variability and compensating effects. Hum Mov Sci. 1984;3:51–76.
Yamako G, Chosa E, Totoribe K, Fukao Y, Deng G. Quantification of the sit-to-stand movement for monitoring age-related motor deterioration using the Nintendo Wii Balance Board. PLoS One. 2017;12(11):e0188165.
Acknowledgements
The authors wish to acknowledge the financial support from the Key Project of Tianjin Natural Science Foundation (19JCZDJC33200).
Funding
The Key Project of Tianjin Natural Science Foundation (19JCZDJC33200)
Author information
Authors and Affiliations
Contributions
Conceptualization: Shuo Yang, Na Zhao, Shouwei Zhang, and Qiang Xue. Formal analysis: Na Zhao. Methodology: Shuo Yang and Qiang Xue. Supervision: Qiang Xue. Visualization: Shouwei Zhang
Corresponding author
Ethics declarations
Ethics approval and consent to participate
This study was approved by the Academic Ethics and Scientific Ethics Committee of the Academic Committee of Tianjin University of Science and Technology. All subjects provided informed consent prior to participation.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, S., Zhao, N., Zhang, S. et al. Analysis of the effect of handrail and foot position on STS in healthy young adults with knee support. Res. Biomed. Eng. 39, 853–862 (2023). https://doi.org/10.1007/s42600-023-00310-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42600-023-00310-x