
Abstract
Balancing discrete time, cost, and resource allocation poses a significant challenge in construction projects due to their inherent conflicts. The competitive nature of the construction market underscores the importance of optimizing trade-offs among these objectives for successful project completion. To address the complexities and limitations of existing models, this paper presents a discrete time-cost-resources trade-off (DTCRT) optimization framework utilizing the opposition-based non-dominated sorting genetic algorithm (OBNSGA III), in which opposition-based learning (OBL) is used for generating the initial population. The proposed model accommodates multi-mode project activities with varying resource requirements. A case study application demonstrates the efficacy of proposed approach in generating the Pareto-optimal solutions. Comparative analysis against existing techniques validates the effectiveness of proposed method. Additionally, trade-off plots and an a priori decision-making tool are provided to facilitate selection among the generated solutions by project stakeholders.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The gradual evolution of project management stems from the imperative to control and optimize construction project objectives (Sharma & Trivedi, 2021). This encompasses planning, scheduling, and controlling stages, where project stakeholders play a pivotal role in establishing objectives (Patil et al., 2024). The fundamental approach for project planning and management depends largely on these stated objectives. Among these objectives, time (duration) and cost stand out as primary focuses of construction project planning and success (Afshar et al., 2007; Kaveh & Ilchi Ghazaan, 2020). However, project time and costs fluctuate with the different consumption of resource (Sharma & Trivedi, 2023b). The use of cost-effective resources using advanced technology reduces the project time, but increases cost of project (Afshar et al., 2007; Kaveh & Bakhshpoori, 2016; Kaveh & Massoudi, 2014). Therefore, the time, cost and resources of a project are contradictory and conflicting objectives. Striking a balance between time, costs and resources is thus more essential to effectively execute the project.
In recent decades it has been increasingly common for practitioners to resolve trade-off issues. In this context, Feng et al. (1997), Tiwari and Johari (2015), Kaveh and Laknejadi (2013) and others addressed the time-cost trade-off (TCT) issues of projects. TCT is expanded to time-cost-resources trade-off (TCRT) due to increasing association and need of project stakeholders (Sharma & Trivedi, 2022; Azim Eirgash et al., 2023; Aminbakhsh & Sonmez, 2016). This article also proposes a novel model for optimizing discrete time-cost-resource (DTCRT) in order to relieve the complexity and constraints of existing models.
Construction projects consist of multiple activities that are interlinked or reliant on each other (Sharma & Trivedi, 2020). Each activity can be executed through various available modes, with each mode being associated with different time, cost, and resource requirements (Kaveh et al., 2013; Kaveh, Fahimi-Farzam et al., 2015; Kaveh, Khanzadi, Kaveh et al., 2015b). Consequently, there exist numerous ways to complete project based on permutations of these execution modes. Additionally, as the number of execution modes and activities increases in a construction project, the computation complexity of finding Pareto-optimal solutions for project completion also escalates (Azim Eirgash et al., 2023; Eirgash et al., 2019). In response to this challenge, this paper presents an OBNSGA-III-based scheduling method to determine the optimal approach for completing the project. The OBNSGA III algorithm is chosen for its effectiveness in handling multi-objective optimization problems, particularly in construction project scheduling. This algorithm efficiently explores the solution space, identifies Pareto-optimal solutions, and maintains solution diversity, making it suitable for our DTCRT model’s objectives. The applicability of OBNSGA-III is demonstrated by solving the DTCRT problem of a real case study. Comparison against existing literature methods highlights the superiority of the proposed OBNSGA-III approach.
After providing a detailed introduction, the paper proceeds to explore several critical sections. It begins with a comprehensive literature review, offering insights into existing methodologies and challenges regarding the optimization of time, cost, and resource trade-offs in construction projects. Subsequently, the problem formulation section articulates the specific challenges of DTCRT in construction projects, delineating objectives, constraints, and variables. The research methodology section then elucidates the development process of the OBNSGA-III-based DTCRT model, highlighting the rationale behind employing OBL and detailing the model’s construction. The paper further presents the results of applying the proposed model to a real-world case study, discussing obtained optimizations, trade-offs, and performance metrics. Comparative analysis against existing methods follows, evaluating the efficiency and efficacy of the proposed model through quantitative measures. Finally, the paper concludes by summarizing key findings, implications, and avenues for future research, providing valuable insights for construction project management practitioners.
Review of literature
Literature review of paper provides a comprehensive examination of existing methodologies and challenges pertaining to the optimization of time, cost, and resource trade-offs in construction projects.
Project scheduling methods can be categorized into three main types: deterministic, heuristic, and meta-heuristic (Sharma & Trivedi, 2021). Deterministic techniques, such as the Critical Path Method (CPM) originated by Kelley and Walker (1959), have been widely used for planning project activities. These techniques provide exact solutions but may not adequately address the complexities and uncertainties inherent in construction projects (Eirgash & Toğan, 2023). Heuristic techniques, on the other hand, rely on past problem-solving practices and practical rules of thumb (Zhou et al., 2013). Examples include Fondahl’s Approach (Fondahl, 1962) and approximation methods like Siemens (Siemens 1971). While heuristic methods offer simplicity and flexibility, they may lack the ability to find globally optimal solutions.
In recent years, meta-heuristic techniques have gained traction for their ability to discover relatively good solutions in large multi-objective optimization problems. However, they do not guarantee globally optimal solutions (Banihashemi et al., 2021). Meta-heuristic methods such as Genetic Algorithms (GA), Particle Swarm Optimization (PSO), and Simulated Annealing (SA) have been applied to address the TCT problems in construction projects (Kosztyán & Szalkai, 2018; Sharma & Trivedi, 2023b; Tiwari et al., 2022).
Furthermore, studies have extended the traditional TCT problem to consider additional objectives such as resources and quality (Shahsavari Pour et al., 2010). Recently, the NSGA-II (Deb & Jain, 2014) and modified evolutionary algorithms (Tran et al., 2018) have been proposed to tackle discrete time-cost trade-off issues in resource-constrained environments. Additionally, approaches like PSO have been adapted to simultaneously optimize time, costs, resources, and cash flow in construction project scheduling (Elbeltagi et al., 2016). However, challenges remain in achieving convergence to optimal solutions, especially as the number of competing objectives increases (Köppen & Yoshida, 2007).
One significant advancement in multi-objective optimization is the development of NSGA-III, which addresses challenges such as population diversity and convergence (Deb & Jain, 2014). NSGA-III has been applied to various practical issues and has demonstrated the ability to find well-converged and diverse solutions (Deb & Jain, 2014). However, the literature review points out that the benefits of population initialization and generation hopping in NSGA-III have not been fully utilized in studies related to construction project scheduling (Panwar & Jha, 2019).
To address this gap, the paper proposes the use of Opposition-based Learning (OBL) in conjunction with NSGA-III for population initialization and generation hopping. OBL, introduced by Tizhoosh (2005), has been shown to provide diverse and fit initial populations, accelerating convergence while maintaining solution diversity (Aminbakhsh & Sonmez, 2016b; Lotfi et al., 2022). By incorporating OBL into NSGA-III, the proposed model aims to improve the efficiency of multi-objective optimization for DTCRT problems in construction projects.
In summary, the literature review provides a comprehensive overview of existing methodologies for addressing time-cost-resource trade-offs in construction projects. It identifies gaps in current approaches and highlights the potential of integrating OBL with NSGA-III to enhance solution quality and convergence. These insights lay the groundwork for the development of the proposed Discrete Opposition-based NSGA-III framework. In next sections of the paper, DTCRT problem formulation, proposed OBNSGA-III based DTCRT model, case study and discussion, and conclusions of the study are comprehensively provided.
DTCRT problem formulation
In the realm of construction projects, achieving optimal balance among time, cost, and resources stands as pivotal for ensuring successful project completion. Within this section, a thorough delineation of the input parameters, objectives, and constraints intrinsic to the DTCRT problem is provided.
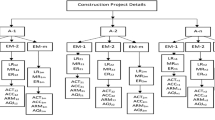
Activity execution modes
Each activity \( {A}_{i}\) in the construction project can be executed using one of multiple execution modes \( {EM}_{ij}\), where j = 1,2,…,\( {M}_{i}\). These modes represent different approaches to completing the activity, each with its unique time and cost implications due to variations in resource utilization.
Input parameters
The optimization problem considers the following input parameters:
Activity completion time
This parameter denotes the time required to complete each activity.
Activity completion cost
This parameter represents the cost associated with completing each activity.
Activity resource moment
This parameter reflects the variability in resource requirements and duration of resource utilization for each activity.
Objective functions
The DTCRT optimization aims to achieve the following objectives:
Minimization of project completion time (PCT)
This objective seeks to minimize the total duration necessary for completing the entire project, considering the sequence of activities and their respective completion times. It is represented mathematically as:
Minimization of project completion cost (PCC)
This objective aims to minimize overall cost of project completion, inclusive of both direct and indirect costs. Direct costs are associated with specific activities, while indirect costs are incurred over time. The objective function is formulated as:
Minimization of project resource moment (PRM)
This objective seeks to minimize the variation in resource requirements and duration of resource utilization throughout the project. It considers labour (LR), material (MR), and equipment (ER) resource moments for each activity. In this paper, minimum moment algorithm (a heuristic method) is employed to calculate fluctuation in resources. According to this algorithm, fluctuation in resources is equal to moment of resource histogram about the x-axis (Mx). While, resource utilization period is calculated by taking the moment of resource histogram about y-axis (My) as suggested by Hegazy (2002). PRM is equal to the summation of Mx and My, which is called as double moment, and can be given as follows;
Where,
Where, \( {R}_{k}^{t}\) denotes the usage of resource k over a time period t.
Limitations
Several following constraints guide the optimization process:
Sequential completion
Activities must be completed sequentially for successful project execution.
Single execution mode
Each activity is completed using only one selected execution mode.
Decision variables
Execution modes for activities are decision variables, constrained to positive integers within defined bounds.
Preservation of priority connections
Priority connections between activities are maintained throughout the optimization process.
Proposed OBNSGA-III based DTCRT model
Over the past two to three decades, researchers have developed various Evolutionary Multi-Objective Algorithms (EMOAs) to tackle optimization problems with two or more objectives (Zhang et al., 2014). In this context, Deb and Jain (2014) introduced NSGA-III, which builds upon the foundation of NSGA-II, with its primary distinction lying in the selection mechanism within non-dominated fronts. As the number of objectives increases in an optimization problem, the population within non-dominated fronts grows exponentially, posing challenges in selecting population members for the next generation. To address this issue, Deb and Jain (2014) proposed a reference point-based non-dominated sorting approach, inspired by the work of Das and Dennis (1998). By placing predefined or undefined reference points on a normalized hyper-plane, this approach aids in distributing the population across higher-dimensional non-dominated fronts. Apart from the selection mechanism within non-dominated fronts, the remaining aspects of NSGA-III remain consistent with NSGA-II.
As delineated in the problem formulation, each activity in a construction project presents multiple alternative execution options. Consequently, for each activity, a specific alternative must be designated as a decision variable. The combination of decision variables for project activities constitutes a potential solution to the trade-off problems. In NSGA-III, each solution to the optimization problem is represented as a chromosome, with each gene corresponding to a decision variable or activity in construction project. Therefore, each gene of a chromosome holds the value (allele) of the decision variable representing the chosen alternative for executing that activity. To illustrate, consider a construction project with nine activities, each offering three available alternative options. A chromosome solution, as depicted in Fig. 1, represents a potential solution for completing activities 1–9 with alternative options 3, 1, 2, 3, 2, 1, 2, 3, and 1, respectively. Adhering to permutation rules, there exist a total of 39 potential project delivery solutions.

Chromosome structure
The detailed procedure for solving the OBNSGA III-based DTCRT optimization is elaborated as follows;
Step-1) The OBNSGA-III algorithm begins by generating a population of size N using the OBL technique and placing a set of widely distributed M-dimensional reference points H on a normalized hyper-plane. This step ensures a diverse initial population and reference points for objective optimization.
Step-2) Next, the algorithm proceeds with solving the Many-Objective Scheduling Problem (MOSP) using NSGA-III. The first step involves generating and ranking an initial population (Pt) of size N. For each chromosome in the population, the fitness value of each objective is computed, accounting for every possible solution.
Step-3) Following the computation of fitness values, non-dominated sorting is performed to create non-dominated fronts. Within each front, solutions are ranked based on their crowding distance, which measures the density of solutions around a particular solution. This process results in a ranked initial population, where solutions in higher fronts are generally more desirable.
Step-4) After ranking, tournament selection is employed to create a mating pool from the ranked population. In this stage, pairs of solutions are randomly selected, and tournaments are conducted to determine the winners based on their ranks. The selected solutions from the tournaments form the mating pool.
Step-5) The mating pool undergoes crossover and mutation operations to generate offspring solutions. Crossover involves exchanging genetic information between pairs of parent solutions, while mutation introduces small random changes to the offspring. These operations contribute to the exploration of the solution space and the generation of diverse offspring.
Step-6) Subsequently, the offspring solutions are combined with the parent population (Pt) to form a combined population (Rt). This combined population undergoes non-dominated sorting to identify non-dominated solutions and create non-dominated fronts.
Step-7) From these non-dominated fronts, a new population is generated for the next generation. Solutions are selected based on their ranks and crowding distances to ensure diversity and maintain high-quality solutions. This process continues iteratively until a stopping criterion is met, such as reaching a maximum number of generations or achieving convergence of solutions.
Figure 2 illustrates the iterative movement of the algorithm from one generation to the next, highlighting its iterative nature and the criteria for termination. Through this iterative process, OBNSGA-III efficiently searches for optimal solutions to the MOSP, balancing multiple objectives and constraints.

Flow chart for OBNSGA III
Validation of the model
In the pursuit of enhancing multi-objective optimization methodologies, a novel approach termed OBNSGA III based DTCRT is proposed in this paper and rigorously validated against the established Opposition Multi-Objective Differential Evolution (OMODE) algorithm, as detailed by Luong et al. (2018). A comparative analysis was conducted between the outcomes generated by the proposed model and those produced by the OMODE algorithm, utilizing identical algorithm parameters. The results, as presented in Table 1, revealed that the proposed model’s performance is either comparable to or superior to that of Luong et al. (2018). Notably, the proposed model consistently demonstrated high percentages of project time (PT), project cost (PC), and project quality (PQ), affirming its capability to concurrently optimize time, cost, and quality objectives.
Case study and discussion
The developed DTCRT optimization methodology was put into practice through a case study centered in Gwalior, India. This case study involved a project consisting of 13 distinct activities. Table 2 presents a comprehensive breakdown of each activity, encompassing its name, the succeeding activity (if applicable), the number of possible execution modes (EMs), and the associated objectives including time, cost, and required resources. With the project comprising 13 activities, the total number of potential approaches to delivering the project amounted to an impressive 55,296. These numerous approaches were derived from the various available execution modes for each activity. To discern the most effective strategies for completing the project, the proposed OBNSGA III-based DTCRT model was employed. This model identifies Pareto optimal solutions, which represent the optimal combinations of activity execution modes conducive to project success.
MATLAB R2022a was used to implement the recommended OBNSGA III based DTCRT model for the above case study project. Several experiments with different values of OBNSGA III parameters were conducted in order to finalise the values of these parameters.
There was a total of 24 distinct Pareto optimum solutions found, i.e. 24 unique optimal combinations of activity execution modes that matched the project’s objectives. PCT, PCC, and PRM were calculated for each of the project’s 24 delivery options. The PCT ranges from 169 to 228 days, the PCC from 489289.00 to 784189.70, and the PRM ranges from 143,840 to 170,624. Table 3 lists all 24 Pareto-optimal solutions that were found. Figures 3 and 4, and 5 depict trade-off plots between time-cost, time-resources, and time-cost-resources, respectively.

TCT Plot

TRT Plot

TCRT plot
Comparison based on performance metrics
In evaluating the performance of optimization algorithms, it is imperative to assess their ability to efficiently navigate and explore the Pareto-optimal fronts (Sharma & Trivedi, 2023a; Trivedi & Sharma, 2023). Convergence and diversity serve as fundamental criteria for gauging the effectiveness of such algorithms in multi-objective optimization contexts. Convergence and diversity serve as fundamental criteria for assessing the efficacy of such algorithms in multi-objective optimization contexts. As depicted through bold values in Table 4, the performance of the proposed DTCRT optimization method was comprehensively assessed using various metrics, as detailed below:
Unique number of pareto-optimal solutions (UNPS)
The proposed OBNSGA III based DTCRT model demonstrated a higher number of unique Pareto-Optimal solutions compared to the OMODE algorithm, indicating its efficacy in identifying optimal solutions.
Spacing metric (SM)
The SM quantifies the standard difference between consecutive Pareto-optimal solutions. The proposed model exhibited a lower SM value, indicating better convergence towards the optimal Pareto front.
Spread (sp)
Sp measures the variety among Pareto-optimal solutions. The proposed model showcased a slightly higher spread, suggesting increased solution variety and exploration capability along the Pareto front.
Quality metrics (QM)
QM assesses the quality comparison between Pareto-optimal solutions generated by different multi-objective optimization algorithms. The proposed model exhibited superior QM values, reflecting its ability to produce high-quality solutions.
Diversification metrics (DM)
DM evaluates the diversification metrics by assessing the extension of Pareto-optimal frontal solutions. The proposed model showcased a higher DM value, indicating increased exploration along the Pareto front.
Non-uniformity of pareto-optimal front (NPF)
NPF measures the non-compliance in the distribution of the Pareto curve. The proposed model demonstrated improved NPF compared to the OMODE algorithm, suggesting better uniformity along the Pareto front.
Hypervolume (HV)
HV quantifies the volume covered by Pareto-optimal solutions while meeting all objectives. The proposed model achieved a higher HV value, indicating a larger volume covered by Pareto-optimal solutions.
Epsilon (E)
E quantifies the distance of the solutions from the true Pareto front. The proposed model exhibited a lower E value, suggesting a closer approximation to the true Pareto front.
Computational time (CT)
Despite achieving superior performance across various metrics, the OBNSGA III method incurred a slightly longer computational time compared to the OMODE algorithm. However, this marginal increase in computational time is justified by the significant improvements in solution quality and diversity exploration.
Discussion over findings
The proposed OBNSGA-III based DTCRT model offers a comprehensive framework for tackling the intricate challenges inherent in optimizing time, cost, and resource allocation in construction projects. By integrating NSGA-III with opposition-based learning, the model harnesses the strengths of both techniques to efficiently explore the solution space and identify Pareto-optimal solutions. This integration ensures a diverse initial population and facilitates effective generation hopping, enhancing the model’s ability to converge towards high-quality solutions while maintaining solution diversity. Through a systematic approach, the model provides project stakeholders with a robust optimization tool to navigate the complex trade-offs inherent in construction project management.
The validation of the model against the established OMODE algorithm demonstrates its efficacy in concurrently optimizing multiple objectives, including project completion time, cost compliance, and project quality. The comparison of results indicates that the proposed model consistently outperforms or matches the performance of the OMODE algorithm across various performance metrics. This validation underscores the reliability and effectiveness of the proposed model in generating Pareto-optimal solutions that meet the diverse objectives and constraints of construction projects.
Moreover, the application of the OBNSGA-III based DTCRT model to a real-world case study project in Gwalior, India, highlights its practical utility in identifying optimal combinations of activity execution modes. Through rigorous experimentation and parameter tuning, the model successfully identifies a range of Pareto-optimal solutions, providing project stakeholders with valuable insights for decision-making. The ability to explore a multitude of potential delivery options empowers project teams to make informed decisions that balance time, cost, and resource considerations for successful project completion.
The comparison based on performance metrics further emphasizes the superiority of the proposed model in terms of solution quality, diversity exploration, and computational efficiency. Despite incurring a slightly longer computational time compared to the OMODE algorithm, the OBNSGA-III based DTCRT model offers significant improvements in solution quality and convergence towards the Pareto front. This performance advantage underscores the practical relevance of the proposed model in addressing the complex optimization challenges faced by construction project management practitioners.
In conclusion, the proposed OBNSGA-III based DTCRT model represents a significant advancement in the field of construction project management, offering a robust framework for optimizing trade-offs between time, cost, and resource allocation. By leveraging state-of-the-art optimization techniques and incorporating practical considerations, the model provides a valuable tool for project stakeholders to navigate the complexities of construction projects and make informed decisions that drive project success. As such, the proposed model holds promise for enhancing the efficiency, effectiveness, and sustainability of construction project management practices in the face of evolving challenges and constraints.
Conclusion
As the number of activities in construction projects rise, the need to balance multiple objectives becomes increasingly critical. This study addresses this challenge by leveraging the OBNSGA III algorithm to develop a comprehensive framework for optimizing the time-cost-resources trade-off in construction project scheduling. With the proliferation of project objectives and stakeholder demands, identifying the optimal combinations of execution modes for project activities becomes increasingly daunting. OBNSGA III offers a solution to this complexity by simultaneously optimizing PCT, PCC, and PRM, even as the number of non-dominated solutions increases, presenting challenges in convergence, diversity assessment, and visualization of higher-dimensional objectives.
The proposed DTCRT model is validated through a comparative analysis with an existing case study, demonstrating its effectiveness in discovering Pareto-optimal activity execution mode combinations. The findings underscore several key advantages of the DTCRT paradigm. Firstly, it establishes connections between all three project objectives, expanding the traditional scope of project control mechanisms. Secondly, OBNSGA III proves to be well-suited for handling multi-objective optimization challenges in construction project scheduling. Finally, performance metrics reveal that the proposed OBNSGA III-based DTCRT model outperforms the OMODE algorithm, providing project teams and practitioners with superior solutions for decision-making.
The implementation of the suggested DTCRT model not only aids project teams in selecting optimal solutions from the Pareto-optimal front but also benefits stakeholders by maximizing profits. Moreover, this research contributes to enhancing scheduling decisions for project teams and organizations alike.
However, while the proposed DTCRT model demonstrates effectiveness in identifying Pareto-optimal solutions, its applicability and relevance in large-scale and multi-construction projects remain to be tested. Further research is warranted to address uncertainties related to project duration, cost, and other objectives, ensuring the model’s robustness and applicability across diverse project scenarios.
Data availability
The data can be obtained from the corresponding author based upon a reasonable request.
References
Afshar, A., Kaveh, A., & Shoghli, O. R. (2007). Multi-objective optimization of time-cost-quality using Multi-colony Ant Algorithm. Fuzzy Sets and Systems, 8(2), 113–124.
Aminbakhsh, S., & Sonmez, R. (2016a). Discrete particle swarm optimization method for the large-scale discrete time-cost trade-off problem. Expert Systems with Applications, 51(2016), 177–185. https://doi.org/10.1016/j.eswa.2015.12.041.
Aminbakhsh, S., & Sonmez, R. (2016b). Discrete particle swarm optimization method for the large-scale discrete time-cost trade-off problem. Expert Systems with Applications, 51, 177–185. https://doi.org/10.1016/j.eswa.2015.12.041.
Azim Eirgash, M., Toğan, V., Dede, T., & Basri Başağa, H. (2023). Modified dynamic opposite learning assisted TLBO for solving time-cost optimization in generalized construction projects. Structures, 53(March), 806–821. https://doi.org/10.1016/j.istruc.2023.04.091.
Banihashemi, S. A., Khalilzadeh, M., Zavadskas, E. K., & Antucheviciene, J. (2021). Investigating the environmental impacts of construction projects in time-cost trade-off project scheduling problems with cocoso multi-criteria decision-making method. Sustainability (Switzerland), 13(19). https://doi.org/10.3390/su131910922.
Das, I., & Dennis, J. E. (1998). Normal-boundary intersection: A new method for generating the Pareto surface in nonlinear multicriteria optimization problems. SIAM Journal on Optimization. https://doi.org/10.1137/S1052623496307510.
Deb, K., & Jain, H. (2014). An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Transactions on Evolutionary Computation. https://doi.org/10.1109/TEVC.2013.2281535.
Eirgash, M. A., & Toğan, V. (2023). A novel oppositional teaching learning strategy based on the golden ratio to solve the time-cost-environmental impact Trade-Off optimization problems. Expert Systems with Applications, 224(March). https://doi.org/10.1016/j.eswa.2023.119995.
Eirgash, M. A., Toğan, V., & Dede, T. (2019). A multi-objective decision making model based on TLBO for the time– cost trade-off problems. Structural Engineering and Mechanics, 71(2), 139–151. https://doi.org/10.12989/sem.2019.71.2.139.
Elbeltagi, E., Ammar, M., Sanad, H., & Kassab, M. (2016). Overall multiobjective optimization of construction projects scheduling using particle swarm. Engineering Construction and Architectural Management. https://doi.org/10.1108/ECAM-11-2014-0135.
Feng, C. W., Liu, L., & Burns, S. A. (1997). Using genetic algorithms to solve construction time-cost trade-off problems. Journal of Computing in Civil Engineering. https://doi.org/10.1061/(ASCE)0887-3801(1997)11:3(184).
Fondahl, J. W. (1962). A Non-Computer Approach to The Critical Path Meghod for the Construction Industry. Technical Report No. 9, Stanford University, 1–163.
Hegazy, T. (2002). Computer-Based Construction Project Management. In CIV E 596– CONSTRUCTION MANAGEMENT. https://doi.org/10.1016/B978-0-12-408090-4.00008-6.
Kaveh, A., & Bakhshpoori, T. (2016). An efficient multi-objective cuckoo search algorithm for design optimization. Advances in Computational Design, 1(1), 87–103. https://doi.org/10.12989/acd.2016.1.1.087.
Kaveh, A., & Ilchi Ghazaan, M. (2020). A new VPS-based algorithm for multi-objective optimization problems. Engineering with Computers, 36(3), 1029–1040. https://doi.org/10.1007/s00366-019-00747-8.
Kaveh, A., & Laknejadi, K. (2013). A hybrid evolutionary graph-based multi-objective algorithm for layout optimization of truss structures. Acta Mechanica, 224(2), 343–364. https://doi.org/10.1007/s00707-012-0754-5.
Kaveh, A., & Massoudi, M. S. (2014). Multi-objective optimization of structures using Charged System Search. Scientia Iranica, 21(6), 1845–1860.
Kaveh, A., Kalateh-Ahani, M., & Fahimi-Farzam, M. (2013). Constructability optimal design of reinforced concrete retaining walls using a multi-objective genetic algorithm. Structural Engineering and Mechanics, 47(2), 227–245. https://doi.org/10.12989/sem.2013.47.2.227.
Kaveh, A., Fahimi-Farzam, M., & Kalateh-Ahani, M. (2015). Performance-based multi-objective optimal design of steel frame structures: Nonlinear dynamic procedure. Scientia Iranica, 22(2), 373–387.
Kaveh, A., Khanzadi, M., Alipour, M., & Naraky, M. R. (2015b). CBO and CSS algorithms for resource allocation and time-cost trade-off. Periodica Polytechnica Civil Engineering, 59(3), 361–371. https://doi.org/10.3311/PPci.7788.
Kelley, J. E., & Walker, M. R. (1959). Critical-path planning and scheduling. Proceedings of the Eastern Joint Computer Conference IRE-AIEE-ACM 1959, 160–173. https://doi.org/10.1145/1460299.1460318.
Köppen, M., & Yoshida, K. (2007). Many-objective particle swarm optimization by gradual leader selection. Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics). https://doi.org/10.1007/978-3-540-71618-1_36.
Kosztyán, Z. T., & Szalkai, I. (2018). Hybrid time-quality-cost trade-off problems. Operations Research Perspectives, 5(August), 306–318. https://doi.org/10.1016/j.orp.2018.09.003.
Lotfi, R., Yadegari, Z., Hosseini, S. H., Khameneh, A. H., Tirkolaee, E. B., & Weber, G. W. (2022). -Constrained in Project Management: A case study for a Bridge Construction Project. Journal of Industrial and Management Optimization, 18(1), 375–396. https://doi.org/10.3934/jimo.2020158. a Robust Time-Cost-Quality-Energy-Environment Trade-Off With Resource.
Luong, D. L., Tran, D. H., & Nguyen, P. T. (2018). Optimizing multi-mode time-cost-quality trade-off of construction project using opposition multiple objective difference evolution. International Journal of Construction Management, 0(0), 1–13. https://doi.org/10.1080/15623599.2018.1526630.
Panwar, A., & Jha, K. N. (2019). A many-objective optimization model for construction scheduling. Construction Management and Economics. https://doi.org/10.1080/01446193.2019.1590615.
Patil, A. S., Agarwal, A. K., Sharma, K., & Trivedi, M. K. (2024). Time-cost trade-off optimization model for retrofitting planning projects using MOGA. Asian Journal of Civil Engineering. https://doi.org/10.1007/s42107-024-01014-y.
Shahsavari Pour, N., Modarres, M., Aryanejad, M. B., & Moghadam, T. (2010). R. The discrete time-cost-quality trade-off problem using a novel hybrid genetic algorithm. Applied Mathematical Sciences.
Sharma, K., & Trivedi, M. K. (2020). Latin hypercube sampling-based NSGA-III optimization model for multimode resource constrained time–cost–quality–safety trade-off in construction projects. International Journal of Construction Management. https://doi.org/10.1080/15623599.2020.1843769.
Sharma, K., & Trivedi, M. K. (2021). Development of Multi-objective Scheduling Model for Construction projects using opposition-based NSGA III. Journal of the Institution of Engineers (India): Series A. https://doi.org/10.1007/s40030-021-00529-w.
Sharma, K., & Trivedi, M. K. (2022). AHP and NSGA-II-Based Time–Cost–Quality Trade-Off Optimization Model for Construction Projects. 45–63. https://doi.org/10.1007/978-981-16-1220-6_5.
Sharma, K., & Trivedi, M. K. (2023a). Discrete OBNSGA III method-based robust multi-objective scheduling model for civil construction projects. Asian Journal of Civil Engineering, 24(7), 2247–2264. https://doi.org/10.1007/s42107-023-00638-w.
Sharma, K., & Trivedi, M. K. (2023b). Modelling the resource constrained time-cost-quality-safety risk-environmental impact trade-off using opposition-based NSGA III. Asian Journal of Civil Engineering, 24(8), 3083–3098. https://doi.org/10.1007/s42107-023-00696-0.
Tiwari, S., & Johari, S. (2015). Project scheduling by Integration of Time Cost Trade-Off and constrained resource scheduling. Journal of the Institution of Engineers (India): Series A. https://doi.org/10.1007/s40030-014-0099-2.
Tiwari, A., Sharma, K., & Trivedi, M. K. (2022). NSGA-III-Based Time–Cost–Environmental Impact Trade-Off Optimization Model for Construction Projects. 11–25. https://doi.org/10.1007/978-981-16-1220-6_2.
Tizhoosh, H. R. (2005). Opposition-based learning: A new scheme for machine intelligence. Proceedings - International Conference on Computational Intelligence for Modelling, Control and Automation, CIMCA 2005 and International Conference on Intelligent Agents, Web Technologies and Internet. https://doi.org/10.1109/cimca.2005.1631345.
Tran, D. H., Luong-Duc, L., Duong, M. T., Le, T. N., & Pham, A. D. (2018). Opposition multiple objective symbiotic organisms search (OMOSOS) for time, cost, quality and work continuity tradeoff in repetitive projects. Journal of Computational Design and Engineering, 5(2), 160–172. https://doi.org/10.1016/j.jcde.2017.11.008.
Trivedi, M. K., & Sharma, K. (2023). Construction time–cost–resources–quality trade-off optimization using NSGA-III. Asian Journal of Civil Engineering, 24(8), 3543–3555. https://doi.org/10.1007/s42107-023-00731-0.
Zhang, L., Du, J., & Zhang, S. (2014). Solution to the time-cost-quality trade-off problem in construction projects based on immune genetic particle swarm optimization. Journal of Management in Engineering. https://doi.org/10.1061/(ASCE)ME.1943-5479.0000189.
Zhou, J., Love, P. E. D., Wang, X., Teo, K. L., & Irani, Z. (2013). A review of methods and algorithms for optimizing construction scheduling. Journal of the Operational Research Society, 64(8), 1091–1105. https://doi.org/10.1057/jors.2012.174.
Funding
No funding was received for this research work.
Author information
Authors and Affiliations
Contributions
K.C.S. collected the data, V.R. analysed the data, S.H. and G.B. wrote the manuscript and A.K.P. performed the mathematical analysis and finalised the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sethi, K.C., Rathinakumar, V., Harishankar, S. et al. Development of discrete opposition-based NSGA-III model for optimizing trade-off between discrete time, cost, and resource in construction projects. Asian J Civ Eng 25, 4633–4644 (2024). https://doi.org/10.1007/s42107-024-01069-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42107-024-01069-x