
Abstract
Significant amount of attention with several limitations has given to incorporate the environmental impact, safety and quality parameters in construction time-cost trade-off. To alleviate the limitations of existing trade-off models, for the first time, the presented paper provides a resource constrained time-cost-quality-safety risk-environmental impact trade-off (RCTCQSET) model for construction projects. For this purpose, quality of an activity is expressed as quadratic function of its time, safety risk is expressed as fuzzy function of likelihood and severity of safety risk, while dust, gases and noise emissions are taken to assess the environmental impact of construction activities. The paper considers the multi-mode activities, and resources as major constraints in construction projects. Proposed RCTCQSET model is developed using opposition-based non-dominated sorting genetic algorithm III (OBNSGA III), in which generation of initial population and generation jumping are achieved by opposition-based learning. An existing case study project is analysed, and comparison between the outcomes of proposed and existing trade-off models demonstrates the capabilities of developed model. Furthermore, correlation and trade-off plot analysis among TCQSE components and sensitivity analysis of developed model attract the construction professionals for applying the developed model as scheduling decision and explicitly model in construction related projects.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
It is extremely important for construction managers to schedule the projects based on objectives established during the project planning phase (Sharma & Trivedi, 2021). Undoubtedly historically, time and cost have been extremely attentive objectives of construction project planning (Liu et al., 1995). Besides, overlooking the quality, safety and environmental impact of activities in scheduling of projects may lead to rework, frequent accidents and environmental pollution in construction work, respectively (Ozcan-Deniz et al., 2012; Sharma & Trivedi, 2020). Improper planning and unplanned use of limited available resources make it difficult for construction departments to stay with minimum environmental impact of projects along with project’s schedule and budget (Cheng et al., 2014). Rework has adverse impact on time-cost performance and productivity of construction projects (Dehghan & Ruwnapura, 2014). Along with this, many times safety has to be compromised for completing the project on scheduled time and cost (Afshar & Dolabi, 2014). Therefore, in project scheduling, making trade-offs between these five conflicting objectives, namely, time, cost, quality, safety and environmental impact, is of utmost importance for successful completion of the project. Over the years, several time-cost, time-cost-quality, time-cost-quality-safety and time-cost-quality-environment impact trade-off models have been proposed using different mathematical programming methods (Afshar & Dolabi, 2014; Banihashemi & Khalilzadeh, 2020; Cheng et al., 2014; Luong et al., 2018; Sharma & Trivedi, 2020; Yang, 2007).
Resource constrained scheduling problems (RCSPs) have been confirmed as NP-hard problems (Blazewicz et al, 1983), in which project has to be completed within optimum time, cost, quality, safety risk and environmental impact using limited available resources. Construction projects have time and cost objectives that can be evaluated numerically with using formulas available in literature. Forward pass technique and directed acyclic graph theory for project time computation (Agdas et al., 2018), and various cost estimation techniques for total project cost estimation are available in literature (Liu & Zhu, 2007). On the other hand, it is always challenging to accurately estimate the environmental impact, safety and quality of project as no universally acceptable formulas are available for them. Quality of an activity, which is a qualitative parameter, is considered as quadratic function of its time (Zhang et al., 2014). Safety risk is also a qualitative objective of project, and it is taken as a fuzzy function of safety risk likelihood and safety risk severity of various safety indicators (Sharma & Trivedi, 2020). Various construction activities discharge a huge quantity of noise, harmful gases and dust, therefore, total environmental impact of projects’ activities can be computed by taking the sum of normalized quantity of noise, harmful gases and dust discharges in dimensionless range of 0–1 (Cheng et al., 2014; Marzouk et al., 2008).
The RCSPs have been categorized into four different groups based on; (1) resources and their types; (2) activities and their characteristics; (3) type of fitness function; and (4) information availability (Habibi et al., 2018). A characteristic of construction activities, namely the theory of execution mode of activities is utilized in proposed study. This theory states that a construction project can be characterized by a fixed number of interconnected activities having different execution modes with varying amounts of associated resources (Elmaghraby, 1977). Depending on the type and use of resources, every execution mode is accompanied by a unique amount of completion time and cost, impact on quality of entire project, safety risk, and environmental impact. Individual activity must be completed by one of its available execution modes, and depending on the probable combinations of available execution modes, multiple ways of completing the project are possible. Therefore, it is essential to select the optimal combinations of execution modes of activities for achieving the desired project objectives as well as for the successful achievement of the project.
On the basis of above discussion, the present paper provides an OBNSGA III-based resource constrained time-cost-quality-safety risk-environmental impact trade-off (RCTCQSET) model for construction projects. For improving the convergence and diversity in the OBNSGA III-based RCTCQSET model, the opposition-based learning (OBL) method (Tizhoosh, 2005) is used for generating the initial population along with generation jumping operation in NSGA III. NSGA III algorithm has been broadly used as population-based metaheuristic optimization method that was developed by Deb and Jain (2014) after substituting the crowding distance based selection mechanism of NSGA II (Deb et al., 2002) by refence-point-based selection approach, to improve the algorithms’ performance in solving large-scale optimization problems. Remaining paper is schematized as follows: the existing literature in context of multi-objective trade-off models and constituted research gaps are described in Sect. “Literature review and research gaps”, Sect. “Problem formulation” formulates the present problem mathematically, Sect. “Proposed OBNSGA III-based RCTCQSET model” is provided with step-by-step methodology for OBNSGA III-based RCTCQSET model, Sect. “Case study project” presents the details of case study project, Sect. “Results and discussion” deliberates the obtained results along with sensitivity analysis, comparisons with existing trade-off models and correlation analysis between TCQSE components, and finally the Sect. “Conclusion” concludes the presented paper.
Literature review and research gaps
A number of civil engineering optimization problems have been solved using different optimization approaches (Kaveh & Laknejadi, 2011; Kaveh & Massoudi, 2014; Kaveh et al., 2012, 2013). Literature has shown mainly three methods of trade-off optimization in construction scheduling point of view, which are as deterministic, heuristic and metaheuristic methods (Panwar et al., 2019). Kelley and Walker (1959), for the first time, introduced a deterministic approach based critical path method for project time minimization. Since then, a number of deterministic, heuristic and metaheuristic methods-based trade-off optimization models have been developed so far. Among these three methods, metaheuristic methods have shown the largest efficiency in solving the multi-objective trade-off and large scale optimization problems (Kalhor et al., 2011). Initially, the main emphasis of researchers was to optimize the time-cost trade-off (TCT) for the completion of projects successfully (Feng et al., 1997; Shahriari, 2016; Tiwari & Johari, 2015; Tiwari & Trivedi, 2021; Yang, 2007). In recent decades, the emphasis has been moved towards integrating the additional challenging objectives such as environmental impact, quality, and safety in TCT, which can be explained as follows:
Existing TCQT models
Since the poor quality increases the rework and repair probability in construction work, the TCT models are comprehensively extended to TCQT models in literature (Fu & Zhang, 2016). For the first time, Babu and Suresh (1996) introduced a TCQT model with using three inter-related linear programming models. They considered linear relationship between quality and duration of activities. Then, Afshar et al. (2007) provided an efficient multi-colony ant algorithm to solve the TCT and TCQT problems of construction projects. Multi-objective genetic algorithm (MOGA) was used by El-Rayes and Kandil (2005) to create a TCQT model for highway building projects in which the authors assessed the quality of every execution mode after assigning the suitable weights to activities and quality indicators, however, this study did not suggest any mathematical process to assign the weights. Afterwards, experts’ judgement-based analytical hierarchy process (AHP) is applied to govern the weight of quality indicators and activities in project (Mungle et al., 2013; Sharma & Trivedi, 2020; Sharma & Trivedi, 2022). For capturing the realism more carefully, Zhang et al. (2014) measured the quality as quadratic function of time to estimate quality in every execution mode of activities, and overall quality of project is estimated by taking the average of quality of every activity.
Existing TCST models
Another crucial goal for the construction projects is safety. However, the evolution of the TCST model is only briefly discussed in the literature in few researches. El-Rayes and Khalafallah (2005) first established a model for simultaneously optimizing the cost and safety for multi-objective site layout planning. The safety risk was also included to the TCT optimization model by Afshar and Dolabi (2014), who also employed the MOGA to solve the TCST problems. In this work, at first, the safety risk score was evaluated as a function of the likelihood and severity of safety issues connected with each execution mode, then, the safety risk score was included in TCT optimization. Moreover, when evaluating the safety risk in each mode of activity execution, Sharma and Trivedi (2020) take into account the safety risk score, which is a fuzzy function of SRL and SRS.
Existing TCET models
The environmental impact of construction projects has recently been extensively incorporated to TCT models due to the massive amounts of various pollutants that they discharge into the ambient environment. Based on MOGA, Marzouk et al. (2008) developed a TCET model and included environmental impact in the TCT model. The best combinations of activity execution modes were identified by Xu et al. (2012) and Ozcan-Deniz et al. (2012) while addressing the separate TCET problems. Decision-makers were able to find the optimum trade-off solutions while lowering building costs and CO2 emissions with MOPSO method created by Liu et al. (2013). Cheng et al. (2014) proposed an OB-MODE-based TCET model that considered the dust, gas, and noise emissions from building activities. The TCET model for building contractors taking into account global warming was created by Feng et al. (2018) by merging the discrete event simulation (DES) and PSO approaches in an iterative loop. Banihashemi et al. (2021) applied the Leopold matrix approach to calculate the environmental impact of each activity’s mode of execution. The optimal trade-off options for a project involving urban water supply were then determined using the CoCoSo (Combined Compromise Solution) multi-criteria decision approach. Recently, Tiwari et al. (2020) used the NSGA III approach to create a TCET model and evaluated the environmental impact of activities and projects in terms of equivalent CO2 gas emissions.
The TCQT, TCST, and TCET models discussed above only included three objectives trade-off models. In this order, some researchers developed the trade-off model of four objectives, which are discussed below:
Four objectives trade-off models
To create the TCQST and TCQET models, the quality-safety and quality-environmental effects have been incorporated to TCT models in this order. To create the TCQST model, Panwar and Jha (2021) combined the concepts of quality and safety in the TCT model and used the NSGA III; however, they randomly selected the initial population. The benefits of using the Latin hypercube sampling (LHS)-based population initialization method in NSGA III to produce more varied and convergent optimal solutions to TCQST issues were then demonstrated by Sharma and Trivedi (2020). While their algorithm did not take into account the benefits of generation hopping. The resource-constrained TCQET model was recently developed by Banihashemi and Khalilzadeh (2020) utilizing the data envelopment analysis (DEA) method; however, the safety risk was not taken into consideration by the authors.
Based on the above discussion, it is required to simultaneously incorporate the quality, safety and environmental impact of project in TCT problems. Furthermore, from the algorithmic point of view, metaheuristic algorithms are highly sensitive to the maximum number of iterations that have not been focused on in previous studies. Therefore, the current work offers an OBNSGA III-based RCTCQSET model for civil construction projects to cover the aforementioned research gaps. An existing case study project is analyzed, and comparison between the outcomes of proposed and existing trade-off models demonstrates the capabilities of developed model. Furthermore, correlation and trade-off plot analysis among TCQSE components and sensitivity analysis of developed model attract the construction professionals for applying the developed model as scheduling decision model in real-life construction projects.
Problem formulation
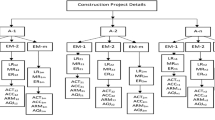
The RCTCQSET model is developed using the following inputs: activity completion time (ACT), activity completion cost (ACC), activity quality index (AQI), activity safety risk (ASR), and activity environmental impact (AEI). Suppose a construction project with n activities (A1, A2, A3,…,An), in which every activity can be completed using one of its m existing execution modes (EM1, EM2, EM3,…,EMm). Execution modes of a construction activity are different possible ways in which the activity can be executed. Each execution mode of a construction activity consists of different possible set of resources such as labour, material and equipment. Therefore, each execution mode can have a different set of resources, that is, RS1, RS2, RS3,…,RSm which control the values of ACT, ACC, AQI, ASR and AEI. For the development of TCQSET model, the primary objective of the paper is to simultaneously optimize the project completion time (PCT), project completion cost (PCC), project quality index (PQI), project safety risk (PSR), and project environmental impact (PEI) that are the functions of the ACT, ACC, AQI, ASR, and AEI, respectively. Moreover, the main assumptions of the study are given as follows; (1) individual activity of project must be accomplished with only one uninterrupted execution mode; (2) there exist precedence relationship between project’s activities; (3) decision variables need to be positive integers within lower and upper bound. The following formulation can be used to express all five objectives;
Objective 1: minimize PCT
The PCT is the total amount of time required to complete all of the activities that are present along the project network’s longest/critical path. Therefore, PCT is:
In Eq. (1), ACTA denotes completion time of activity A lying on the critical path.
Objective 2: minimize PCC
In the present study, components of PCC are considered as direct costs of activities and indirect costs of the project. Therefore, the PCC can be evaluated using Eq. (2).
The first term in this formula \((\sum_{A}D.C)\) is summation of direct cost of individual activity of project that comprises of cost of labor, material and equipment, and the second term (I.C per day × PCT in days) represents indirect cost of project that can be calculated by taking multiplication of indirect cost per day and PCT.
Objective 3: maximize PQI or minimize 1/PQI
To more closely capture reality in construction operations, AQI is assumed to be a quadratic function of ACT based on the following properties (Huang et al., 2008): (1) Overall project quality depends on quality of its all activities; (2) Complex relationship exists between quality and duration of activity, that is, up to some point the quality level of activity increases on increasing the duration of activity. Longer duration not necessarily always increases the quality level of activities such as compaction and concreting, therefore, extending the duration beyond some point decrease the quality level of activities to some extent. Therefore, non-linear relationship between quality and duration activities was considered by Huang et al. (2008), in which quality of each activity is practically estimated by following quadratic equation;
where, \({AQI}_{i}\) is the quality index of ith activity that falls in the range of 0–1 and ACTi is the completion time of ith activity, with ACTi ≥ 0. Coefficients ai, bi and ci can be decided by shortest duration (\({SD}_{i}\)), best duration (\({BD}_{i}\)) and longest duration (\({LD}_{i}\)) of ith activity as shown in quadratic function (Fig. 1). Figure 1 demonstrates that the \({BD}_{i}\) corresponds to the maximum value of \({AQI}_{i}\). \({BD}_{i}\) falls between the \({SD}_{i}\) and \({LD}_{i}\). Based on the investigation of real construction project and statistical analysis of data, the \({BD}_{i}\) can be estimated using Eq. (4);

\({AQI}_{i}\) of ith activity
The \({BD}_{i}\) should be taken as the ACTi to calculate the \({AQ}_{i}\) in Eq. (3). Afterward, the value of overall PQI can be estimated using Eq. (5);
Objective 4: Minimize PSR
This paper estimates the PSR by taking the summation of activity safety risk (ASR) of each activity. The ASR is primarily dependent on three safety items (SI), namely the risk of labour injury, risk of material waste, and the risk of equipment failure. For each safety risk item, a fuzzy logic-based model, as shown in Fig. 2, is used to determine the safety risk. However, supplemental material is provided with a comprehensive description of this fuzzy logic-based model for safety risk assessment. The total safety risk associated with each safety item is used to calculate ASR for each execution mode. Following that, PSR can be determined using the equation below:
where ASRA represents the total safety risk in activity A.

Fuzzy logic-based model for safety risk assessment
Objective 5: minimize project environmental impact (PEI)
Three main factors that contribute to the environmental impact of construction project operations are emissions of dust, gases, and noise (Marzouk et al., 2008). The total sum of each activity’s environmental impact (AEI) is known as the PEI. The normalized value of the emissions of dust, hazardous gases, and noise can be added up to estimate the AEI in individual execution mode. Consequently, the PEI can be assessed using the following equation (Marzouk et al., 2008);
where, n denotes the number of project activities. \({E}_{Dust}\) and \({E}_{Dust}^{T}\) are actual and maximum threshold values of dust emissions, respectively. \({E}_{Gases}\) and \({E}_{Gases}^{T}\) are actual and maximum threshold values of gas emissions, respectively. \({E}_{Noise}\) and \({E}_{Noise}^{T}\) are actual and maximum threshold values of noise emissions, respectively.
Proposed OBNSGA III-based RCTCQSET model
Deb and Jain (2014) used the Das and Dennis (1998)-recommended reference point-based non-dominated sorting strategy in the standard NSGA III, which places the predefined/undefined reference points on a normalized hyper-plane. Besides, for generation jumping and population initialization, the OBL technique is combined into the NSGA III.
The solutions of scheduling problems in OBNSGA III should initially be encoded in chromosomal form. From the perspective of a construction project, the number of genes in chromosomes should be equivalent to the number of activities in that project. In projects of multi-mode activities, each of the execution modes are decision variables and OBNSGA III works on selecting the optimal combinations of activities’ execution mode to deliver the project while fulfilling the projects’ objectives. The sequence number of execution mode assigned to a certain activity is represented by an allele, which is called as the gene’s value. To properly understand the chromosomal solution, consider a n-activity project with five different execution modes for each. Then, S = {A12, A21, A32,…,An4} will be a likely solution to the project, in which every member of S denotes number of execution mode allocated for an activity. For instance, the A21 indicates that the second activity is assigned the first execution mode. In addition, the project can be completed using 5n different ways according to permutation theory.
In OBNSGA III, at first, the OBL-based N-individuals are generated as initial population. Then, a normalized hyper-plane is generated with (p + 1) points along each boundary and having an extensive distribution of H number of reference points with M-dimensions. H can be determined using the equation in Eq. (8).
where, M denotes number of objectives, and p denotes number of divisions per objective. However, readers can refer to Sharma and Trivedi (2021) for more details about OBNSGA III, the process methodology of OBNSGA III to solve the RCTCQSET problems is described in brief as follows:
-
Step-(1) initialization of population using OBL technique
To generate OBL-based initial population solutions for a project with n activities, the n-dimensional vector \({X}_{p,j}=\){\({x}_{p,j}, {x}_{p,j}\dots .{x}_{p,j}\)} in which \({x}_{p,j}\) € [0, 1], and its equivalent opposite vector \({X}_{p,j}^{o}=\left\{{x}_{p,j}^{o}, {x}_{p,j}^{o},\dots {x}_{p,j}^{o}\right\}\) is generated as \({x}_{p,j}^{o}\) = 1—\({x}_{p,j}\), while j = 1….n and p = 1….N. Then, \({N}_{p,j}\) population individuals and herewith \({N}_{p,j}^{o}\) opposite population individuals are generated using Eq. (9) and Eq. (10), respectively.
$${N}_{p,j}={LB}_{j}+{x}_{p,j}\times \left({UB}_{j}-{LB}_{j}\right),$$(9)$${N}_{p,j}^{o}={LB}_{j}+{x}_{p,j}^{o}\times \left({UB}_{j}-{LB}_{j}\right),$$(10)where \({UB}_{j}\) and \({LB}_{j}\) represent upper and lower bound of jth decision variable. Subsequently, the population of size 2N is produced by joining \({N}_{p,j}\) and \({N}_{p,j}^{o}\). Each population individual is evaluated using objective functions. As the population size should be unchanged throughout optimization procedure, it is essential to select the best N population members from these 2N using reference point based non-dominated sorting strategy (Storn & Price, 1997). The generated OBL-based initial N population members work as parent population (Pt) for the 1st generation of OBNSGA III. Thereafter, the parent population (Pt) goes through the following processes in every generation (steps 2 to 5);
-
Step-(2) generating the offspring population
To create the offspring population, the parent population (Pt) undergoes through polynomial mutation (PM) and simulated binary crossover (SBX). Where, PM is a very comparable non-uniform mutation operator that was established by Deb and Goyal (1996). Besides, in consideration of one-point crossover characteristics in binary-coded genetic algorithms, Deb and Agrawal (1994) created the SBX.
-
Step-(3) non-dominated sorting of combined population (Rt: Pt U Qt)
After combining the offspring population (Ot) and parent population (Pt), the combined population (Rt) of size 2N is produced. Next, based on non-dominated sorting, these 2N solutions (Rt) are distributed in n non-dominated fronts (F1, F2 …Fl.. Fn).
-
Step-(4) generating the new population for next generation
To create the new population for next generation, it is necessary to first preserve the population members (It) from the n non-dominated fronts (F1, F2,…,Fl.. Fn) until it equals to N, that is It = N. Now, the following two scenarios are possible: (1) If It equals N up to the front Fl, then It becomes a new population for new generation (Pt+1); (2) If It exceeds N, the pt+1 population members from the first Fl-1 non-dominated fronts should be preserved, and the remaining K (N–pt+1) population members should be chosen from the front Fl using a reference point-based selection approach to maintain the greatest possible diversity in population members.
-
Step-(5) generation jumping
If the jumping condition is met at this point, that is, R () ≤ [− (g/(Gmax)^2 + 2(g/(Gmax)], where R () represents a random number in the range of 0 to 1, the equivalent opposite (\({N}_{i,j}^{o,current}\)) population is determined using Eq. (11) and combined to current population (\({N}_{i,j}^{current}\)). Then, to produce the N population members that are the fittest, these combined 2N population members are put through a non-dominated sorting and reference point-based selection procedure. Generation jumping, in contrast to population initialization based on OBL, computes the opposite population (\({N}_{i,j}^{o,current}\)) using the minimum (\({Min}_{j}^{p}\)) and maximum (\({Max}_{j}^{p}\)) values of the decision variables in the current population (\({N}_{i,j}^{current}\)).
$${N}_{i,j}^{o,current}={Min}_{j}^{p}+\left({Max}_{j}^{p}-{N}_{i,j}^{current}\right).$$(11)
Equation (11) computes the opposing population utilizing the current interval of the decision variables without forfeiting the knowledge of the present convergent population (Rahnamayan et al. (2008). In OBNSGA III, the change from one generation to the following is shown in Fig. 3. Because the OBNSGA III method is iterative in nature, it keeps going until the stopping condition is met. Broadly speaking, stopping conditions include the maximum number of generations (\({G}_{max}\)), the achieved convergence of solutions, or possibly both. A comprehensive list of Pareto-optimal solutions is provided to the user after the optimization process is ended.

Flow chart for OBNSGA III
Case study project
The presented model was applied to a number of case study projects. To reveal the efficiency of developed OBNSGA III-based RCTCQSET model, this paper numerically analyzes an existing case study project and compare the obtained results against existing schedule optimization models based on MOPSO, OBMODE, NSGA III and LHS-NSGA III. A real tunnel construction project is adopted from a previous study (Marzouk et al., 2008). This project consisted of 25 activities having different possible execution modes. Since Marzouk et al. (2008) solved the case study for TCET optimization, this paper estimates the AQI in each execution mode using Eq. (3) and ASR is estimated using earlier explained fuzzy logic model after considering the SRL and SRS values based on nature of activity. Three safety indicators, namely the risk of labour injury, risk of material waste, and the risk of equipment failure are taken into account to estimate the ASR of each activity. Table 1 shows the mathematical values of ACT, ACC, AQI, ASR and AEI associated to each execution mode of each activity. There were 80,621,568 ways to execute the project on the basis of probable combinations of activities’ execution modes. Therefore, to extract Pareto-optimal trade-off solutions from this vast search space, it is required to select a OBNSGA III like efficient optimization process to solve this NP-hard type optimization problem.
Results and discussion
The findings from the case study project are presented in this section. The developed OBNSGA III-based RCTQSET model was built using MATLAB R2020a and a computer with i7 CPU, 64-bit operating system and 8 GB of RAM. The initial step was to decide on the parameters of the algorithm to identify the superior Pareto-optimal trade-off solutions. According to Deb and Jain (2014), the following algorithm parameters for OBNSGA III have been determined: (1) The number of divisions per objective (p), which should be more than the number of optimizing objectives (M), has been determined to be 6; (2) population size should be greater than number of reference points (H) and as well multiple of four; H-value is calculated as 252 using Eq. (10) after substituting the value of M and p by 5 and 6, respectively, therefore, the population size is decided as 256; (3) crossover and mutation distribution index are finalized as 30 and 20, respectively; (4) The SBX and PM probabilities were taken as 1, and PM rate was taken as 1/n, where n is the total number of activities in the case study project, that is, 25; (5) according to the sensitivity analysis, which is mentioned below, the algorithm's maximum iterations/generations have been set at 150.
Sensitivity analysis
The suggested OBNSGA III-based RCTQSET model has undergone a sensitive analysis to identify the maximum number of iterations. For this purpose, the objective values of the Pareto-optimal front solutions were calculated nine times with a number of iterations ranging from 1 to 200, with a 25-iteration gap. The results are shown in Table 2. 13 performance indicators for evaluating the convergence and diversity of optimum solutions were evaluated and mutually compared for each set of acquired Pareto-optimal front solutions to determine the maximum iteration size. Where, convergence refers to search ability of algorithm in finding solutions towards the Pareto-optimal front, while diversity refers to discoverability of algorithm in finding solutions along the Pareto-optimal front. Following 13 performance indicators are taken from the past studies (Habibi et al., 2017; Panwar & Jha, 2019; Sharma & Trivedi, 2020);
-
The unique number of Pareto-optimal solutions (UNPS) generated by algorithm.
-
Spacing metric (SM); this performance indicator evaluates standard deviation of the distances between successive solutions of the resulting Pareto-optimal front.
-
Generational distance (GD); this performance indicator is the measure of convergence degree of algorithm.
-
Spread (Sp); the diversity of Pareto-optimal front solutions is measured by this performance indicator.
-
Maximum spread (MS); this performance indicator calculates the hyperbox's diagonal length, which is made up of extreme objective values.
-
Mean ideal distance (MID); this performance indicator evaluates distance between ideal point and solutions of Pareto-optimal front while assessing the Pareto-optimal front's rate of convergence.
-
Spread of non-dominant solution (SNS); this performance indicator evaluates diversity in Pareto-optimal front.
-
Quality metric (QM); this performance indicator is measured to compare the quality of two Pareto-optimal front.
-
Diversification metric (DM); this performance indicator evaluates extension of Pareto-optimal front solutions.
-
Non-uniformity of Pareto front (NPF); this performance indicator evaluates non-uniformity in distribution of Pareto curve.
-
Hypervolume (HV); this performance indicator evaluates the volume enclosed by solutions of Pareto-optimal front.
-
Epsilon (E); this performance indicator assesses how poorly a solution set performs in comparison to the best-known Pareto-optimal front.
-
Computational time (CT); this is the time required by an optimization method for generating the Pareto-optimal front.
Intuitively, an iteration number giving the highest values of UNPS, MS, QM, DM, SNS, HV and lowest values of GD, SM, Sp MID, NPF, E, CT is considered as maximum number of iterations. As displayed in Table 2, best value of all performance indicators, except computational time, was found at iteration number 150. The bold values in Table 2 represent the best values of performance indicators, which are found at iteration number 150.
Obtained results for case study project
Using the above-explained algorithm’s parameters, as shown in Table 3, over-all 26 unique Pareto-optimal combinations of execution modes were determined as trade-off solutions for the given RCTCQSET problem. Determined PCT, PCC, PQI, PSR and PEI values for each solution of RCTCQSET problem are also presented in Table 3. PCT value ranges from 227 to 254 days, with mean and standard deviation of 241 and 8.25 days, respectively. PCC value ranges from 686,500 to 731,600, with mean and standard deviation of 707,534.60 and 12,893.72, respectively. PQI value ranges from 0.848 to 0.874, with mean and standard deviation of 0.861 and 0.007, respectively. PSR value ranges from 77.42 to 88.95, with mean and standard deviation of 82.44 and 2.57, respectively. Finally, the fifth objective, PEI value ranges from 71.36 to 76.48, with mean and standard deviation of 73.85 and 1.55, respectively.
Minimum value of PCT (217 days) is generated by solution 1, minimum value of PCC (686,500) is generated by solution 23, maximum value of PQI (0.874) is generated by solution 21, minimum value of PSR (77.42) is generated by solution 19, and minimum value of PEI (71.36) is also generated by solution 23. It is worthwhile to highlight that the minimum value of PEI and PCC is generated by the same solution which is solution 23, which means that solution 23 deploys the minimum amount of resources for the execution of the activities. However, solution 23 has a PCT value of 251 days, which is very close to the maximum PCT value of 254. Next, it is also important that the 249 days can be considered as the best duration for project in context of providing the maximum value of PQI as 0.874.
Selecting a solution from Pareto-optimal trade-off solution
To execute the project, project manager is required to select a solution from Pareto-optimal set solutions that have been obtained. To fulfill this requirement, Ferreira et al. (2007) have suggested many methods. The presented paper adopts weighted sum approach, which allows to select a solution with following equations:
In the above equations, wi signifies weight of jth objective and xij signifies normalized jth solution of jth objective. Considering all five objectives of equal importance, and giving the weight to every objective as 0.20, the estimated solution from obtained Pareto-optimal set in this case will be 3-2-1-2-3-1-2-3-3-2-3-1-2-2-2-2-2-1-2-2-2-2-1-1-1. PCT, PCC, PQI, PSR and PEI values associated to this solution are 228 days, 731,600, 0.854, 85.160 and 76.220, respectively.
Analysis of trade-off plots
Figure 4 shows the time-cost trade-off plot, indicating that the increase in PCC is due to decrease in PCT. Figure 5 shows the time-quality trade-off plot, which shows that the PQI increases to a certain extent and thereafter the PQI decreases as a further increase in the PCT. Figure 6 shows the time-safety risk trade-off plot, which shows a decrease in PSR due to any increase in PCT. Figure 7 shows the time-environment impact trade-off plot, which shows that deploying more resources reduces the PCT but increases the value of the PEI. Geoffrion et al. (1972) recommended the value path plot approach for depicting more than 2-dimensional objective space. Figure 8 shows value path plot for 26 Pareto-optimal solutions and corresponding normalized objective values. The horizontal axis shows the all five objectives i.e. TCQSE components, while the all five normalized objective functions are marked on the vertical axis. Since the obtained Pareto-optimal solutions are well distributed over the entire vertical axis, proposed OBNSGA III-based RCTCQSET model is considered to be good in searching well diverse solutions. Also, maximum lines show large variation in slope between two successive axes of objective functions, obviously, therefore, the proposed OBNSGA III-based RCTCQSET model is also good in searching the good Pareto-optimal trade-off solutions.

Time–cost trade-off plot

Time-quality trade-off plot

Time-safety trade-off plot

Time-environmental impact trade-off plot

Value path plot for visualization of 5-dimensional objectives
Correlation study
Test of Pearson correlation coefficient is done to check correlation between all the five objectives. Pearson correlation coefficient (α) statistically explains the interrelationship among the variables. Pearson correlation coefficient ranges from − 1 to + 1. α-value near to – 1 shows strong negative correlation, α-value near to + 1 shows strong positive correlation, and a 0 value of α shows no correlation among the variables. Table 4 shows all α-values as greater than |0.5| between all five objectives (PCT, PCC, PQI, PSR, and PEI), which indicates that there is significant strong interrelationship between all the five objectives at 0.01 significance level. Noteworthy, the PCT was found as negatively correlated to all remaining four objectives, and PCC, PQI, PSR and PEI were found as positively correlated to each other.
Comparison based on performance indicators
Since no fix standard was available in literature to compare the OBNSGA III with existing multi-objective trade-off optimization methods, therefore, based on earlier explained performance indicators, the performance of proposed optimization algorithm in solving above case study project was compared to MOPSO (Elbeltagi et al., 2016), OB-MODE (Luong et al., 2018), standard NSGA III (Panwar & Jha, 2019) and LHS-based NSGA III (Sharma & Trivedi, 2020) with the similar structural properties of chromosomes. Bold values in Table 5 represent the values of performance indicators found for the proposed OBNSGA III model. According to the results displayed in Table 5, the proposed model outperforms the above-mentioned existing models based on all the performance indicators except CT. Therefore, it can be stated that the developed OBNSGA III method is useful in solving the multi-objective scheduling problems of construction projects.
Conclusion
In the limited availability of resources, the challenging conditions of construction field in present scenario demands to accomplish project with maximum quality and minimum time, cost, safety risk and environmental impact. For this purpose, for the first time, OBNSGA III-based RCTCQSET model for civil construction projects has been provided in the presented paper. In OBNSGA III, the OBL technique is incorporated into the NSGA III in the population initialization and generation jumping steps. The applicability of developed model is demonstrated through solving an existing case study project. Though the adopted case study project was given only with time, cost and environmental impact data in literature, the safety risk and quality data are developed using the objective functions given in the paper. Results of solving the case study project for RCTCQSET problem illustrate following conclusion points; (1) the TCQSE components of project are interrelated to each other, and a trade-off relationship can be established between them to encompass the traditional method of project controlling and to provide the explicit scheduling model; (2) based on the performance indicators measuring the convergence and diversity, OBNSGA III algorithm is found to be more efficient than MOPSO, OB-MODE, NSGA III and LHS-NSGA III in solving the trade-off problems of construction; (3) sensitivity analysis of algorithm facilitates to decide the maximum number of required iterations to generate the Pareto-optimal trade-off solutions; (4) time is determined to be negatively related to project cost, quality, safety risk, and environmental impact based on the correlation study; (5) in addition, cost, quality, safety risk and environmental impact of project were found as positively correlated to each other; (6) while deploying the maximum resources, the solution that gives maximum cost to the project is found with giving the maximum environmental impact; (7) there exists a best duration at which the project can be completed with maximum quality, this best duration of project falls between the shortest and longest project duration; (8) finally, the developed model is expected to be useful and explicit scheduling decision model for projects’ stakeholders, ensuring a safe work environment with giving maximum project’s quality.
Accurate estimation of time, cost, quality, safety risk and environmental impact in every execution mode is one of the challenging tasks in this work. Though the developed model has been provided the quality Pareto-optimal trade-off solutions for RCTCQSET problems, it is required to check the efficiency of developed model in solving the multi-objective trade-off problems of large-scale construction projects and multi-project environment. Furthermore, fuzzy logic may be used to deal with unpredictable environment of constriction projects while estimating the projects’ objectives.
Data availability
The corresponding author is willing to provide some or all of the data, models, or code supporting the findings of the study upon reasonable request.
References
Afshar, A., and H. R. Z. Dolabi. (2014). Multi-objective optimization of time-cost-safety using genetic algorithm. International Journal of Optimization in Civil Engineering
Afshar, A., Kaveh, A., & Shoghli, O. R. (2007). Multi-objective optimization of time-cost-quality using multi-colony ant algorithm. Fuzzy Sets and Systems, 8(2), 113–124.
Agdas, D., Warne, D. J., Osio-Norgaard, J., & Masters, F. J. (2018). Utility of genetic algorithms for solving large-scale construction time-cost trade-off problems. Journal of Computing in Civil Engineering. https://doi.org/10.1061/(asce)cp.1943-5487.0000718
Babu, A. J. G., & Suresh, N. (1996). Project management with time, cost, and quality considerations. European Journal of Operational Research. https://doi.org/10.1016/0377-2217(94)00202-9
Banihashemi, S. A., Khalilzadeh, M., Zavadskas, E. K., & Antucheviciene, J. (2021). Investigating the environmental impacts of construction projects in time-cost trade-off project scheduling problems with cocoso multi-criteria decision-making method. Sustainability (switzerland). https://doi.org/10.3390/su131910922
Banihashemi, S. A., & Khalilzadeh, M. (2020). Time-cost-quality-environmental impact trade-off resource-constrained project scheduling problem with DEA approach. Engineering, Construction and Architectural Management, 28(7), 1979–2004. https://doi.org/10.1108/ECAM-05-2020-0350
Blazewicz, J., Lenstra, J. K., & RinnooKan, A. H. G. (1983). Scheduling subject to resource constraints: classification and complexity. Discrete Applied Mathematics, 5(1), 11–24. https://doi.org/10.1016/0166-218X(83)90012-4
Cheng, M. Y., Asce, A. M., & Tran, D. H. (2014). Opposition-based multiple-objective differential evolution to solve the Time—Cost—Environment impact trade-off problem in construction projects. Journal of Computing in Civil Engineering. https://doi.org/10.1061/(ASCE)CP
Das, I., & Dennis, J. E. (1998). Normal-boundary intersection: a new method for generating the pareto surface in nonlinear multicriteria optimization problems. SIAM Journal on Optimization. https://doi.org/10.1137/S1052623496307510
Deb, K., & Agrawal, R. B. (1994). Simulated binary crossover for continuous search space. Complex Systems, 9, 1–34. https://www.complex-systems.com/abstracts/v09_i02_a02/
Deb, K., & Goyal, M. (1996). A combined genetic adaptive search (GeneAS) for engineering design. Computer Science and Informatics, 26, 30–45. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.27.767&rep=rep1&type=pdf
Deb, K., & Jain, H. (2014). An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part i: solving problems with box constraints. IEEE Transactions on Evolutionary Computation. https://doi.org/10.1109/TEVC.2013.2281535
Deb, K., Pratap, A., Agarwal, S., & Meyarivan, T. (2002). A fast and Elitist multiobjective genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation. https://doi.org/10.1109/4235.996017
Dehghan, R., & Ruwnapura, J. Y. (2014). Model of trade-off between overlapping and rework of design activities. Journal of Construction Engineering and Management, 140(2), 04013043. https://doi.org/10.1061/(asce)co.1943-7862.0000786
Elbeltagi, E., Ammar, M., Sanad, H., & Kassab, M. (2016). Overall multiobjective optimization of construction projects scheduling using particle swarm. Engineering, Construction and Architectural Management. https://doi.org/10.1108/ECAM-11-2014-0135
Elmaghraby, S. E. (1977). Activity networks: project planning and control by network models. Wiley.
El-Rayes, K., & Kandil, A. (2005). Time-cost-quality trade-off analysis for highway construction. Journal of Construction Engineering and Management. https://doi.org/10.1061/(ASCE)0733-9364(2005)131:4(477)
El-Rayes, K., & Khalafallah, A. (2005). Trade-off between safety and cost in planning construction site layouts. Journal of Construction Engineering and Management. https://doi.org/10.1061/(ASCE)0733-9364(2005)131:11(1186)
Feng, C. W., Liu, L., & Burns, S. A. (1997). Using genetic algorithms to solve construction time-cost trade-off problems. Journal of Computing in Civil Engineering. https://doi.org/10.1061/(ASCE)0887-3801(1997)11:3(184)
Feng, K., Weizhuo, Lu., Chen, S., & Wang, Y. (2018). An integrated environment-cost-time optimisation method for construction contractors considering global warming. Sustainability (switzerland), 10(11), 1–22. https://doi.org/10.3390/su10114207
Ferreira, J. C., Fonseca, C. M. and Gaspar-Cunha, A. (2007). Methodology to select solutions from the pareto-optimal set: a comparative study. In Proceedings of GECCO 2007: Genetic and Evolutionary Computation Conference
Fu, F., & Zhang, T. (2016). A new model for solving time-cost-quality trade-off problems in construction. PLoS ONE. https://doi.org/10.1371/journal.pone.0167142
Geoffrion, A. M., Dyer, J. S., & Feinberg, A. (1972). Interactive approach for multi-criterion optimization, with an application to the operation of an academic department. Management Science. https://doi.org/10.1287/mnsc.19.4.357
Habibi, F., Barzinpour, F., & Sadjadi, S. J. (2017). A multi-objective optimization model for project scheduling with time-varying resource requirements and capacities. Journal of Industrial and Systems Engineering, 10(November), 92–118.
Habibi, F., Barzinpour, F., & Sadjadi, S. J. (2018). Resource-constrained project scheduling problem: review of past and recent developments. Journal of Project Management, 3, 55–88. https://doi.org/10.5267/j.jpm.2018.1.005
Huang, Y.S., Deng, J.J. and Zhang, Y.Y. (2008). TI time-cost-quality tradeoff optimization in construction project based on modified ant colony algorithm. In Proceedings of the 7th International Conference on Machine Learning and Cybernetics, ICMLC, 2(July):1031–35. https://doi.org/10.1109/ICMLC.2008.4620556
Kalhor, E., Khanzadi, M., Eshtehardian, E., & Afshar, A. (2011). Stochastic time-cost optimization using non-dominated archiving ant colony approach. Automation in Construction. https://doi.org/10.1016/j.autcon.2011.05.003
Kaveh, A., Kalateh-Ahani, M., & Fahimi-Farzam, M. (2013). Constructability optimal design of reinforced concrete retaining walls using a multi-objective genetic algorithm. Structural Engineering and Mechanics, 47(2), 227–245. https://doi.org/10.12989/sem.2013.47.2.227
Kaveh, A., & Laknejadi, K. (2011). A novel hybrid charge system search and particle swarm optimization method for multi-objective optimization. Expert Systems with Applications, 38(12), 15475–15488. https://doi.org/10.1016/j.eswa.2011.06.012
Kaveh, A., Laknejadi, K., & Alinejad, B. (2012). Performance-based multi-objective optimization of large steel structures. Acta Mechanica, 223(2), 355–369. https://doi.org/10.1007/s00707-011-0564-1
Kaveh, A., & Massoudi, M. S. (2014). Multi-objective optimization of structures using charged system search. Scientia Iranica, 21(6), 1845–1860.
Kelley, J.E. & Walker, M.R. (1959). Critical-path planning and scheduling. In Proceedings of the Eastern Joint Computer Conference, IRE-AIEE-ACM 1959
Liu, Li., & Zhu, K. (2007). Improving cost estimates of construction projects using phased cost factors. Journal of Construction Engineering and Management, 133, 91–95.
Liu, L., Burns, S. A., & Feng, C. W. (1995). Construction time-cost trade-off analysis using LP/IP hybrid method. Journal of Construction Engineering and Management. https://doi.org/10.1061/(ASCE)0733-9364(1995)121:4(446)
Liu, S., Tao, R., & Tam, C. M. (2013). Optimizing cost and CO2 emission for construction projects using particle swarm optimization. Habitat International, 37, 155–162. https://doi.org/10.1016/j.habitatint.2011.12.012
Luong, D. L., Tran, D. H., & Nguyen, P. T. (2018). Optimizing multi-mode time-cost-quality trade-off of construction project using opposition multiple objective difference evolution. International Journal of Construction Management. https://doi.org/10.1080/15623599.2018.1526630
Marzouk, M., Madany, M., Abou-Zied, A., & El-said, M. (2008). Handling construction pollutions using multi-objective optimization. Construction Management and Economics, 26(10), 1113–1125. https://doi.org/10.1080/01446190802400779
Mungle, S., Benyoucef, L., Son, Y. J., & Tiwari, M. K. (2013). A fuzzy clustering-based genetic algorithm approach for time-cost-quality trade-off problems: a case study of highway construction project. Engineering Applications of Artificial Intelligence. https://doi.org/10.1016/j.engappai.2013.05.006
Ozcan-Deniz, G., Zhu, Y., & Ceron, V. (2012). Time, cost, and environmental impact analysis on construction operation optimization using genetic algorithms. Journal of Management in Engineering. https://doi.org/10.1061/(ASCE)ME.1943-5479.0000098
Panwar, A., & Jha, K. N. (2019). A many-objective optimization model for construction scheduling. Construction Management and Economics. https://doi.org/10.1080/01446193.2019.1590615
Panwar, A., & Jha, K. N. (2021). Integrating quality and safety in construction scheduling time-cost trade-off model. Journal of Construction Engineering and Management, 147(2), 04020160. https://doi.org/10.1061/(asce)co.1943-7862.0001979
Panwar, A., Tripathi, K. K., & Jha, K. N. (2019). A qualitative framework for selection of optimization algorithm for multi-objective trade-off problem in construction projects. Engineering, Construction and Architectural Management. https://doi.org/10.1108/ECAM-06-2018-0246
Rahnamayan, S., Tizhoosh, H. R., & Salama, M. M. (2008). Opposition-based differential evolution. Studies in Computational Intelligence. https://doi.org/10.1007/978-3-540-68830-3_6
Shahriari, M. (2016). Multi-objective optimization of discrete time-cost tradeoff problem in project networks using non-dominated sorting genetic algorithm. Journal of Industrial Engineering International, 12(2), 159–169. https://doi.org/10.1007/s40092-016-0148-8
Sharma, K., & Trivedi, M. K. (2020). Latin hypercube sampling-based NSGA-III optimization model for multimode resource constrained time–cost–quality–safety trade-off in construction projects. International Journal of Construction Management. https://doi.org/10.1080/15623599.2020.1843769
Sharma, K., & Trivedi, M. K. (2021). Development of multi-objective scheduling model for construction projects using opposition-based NSGA III. Journal of the Institution of Engineers (india). https://doi.org/10.1007/s40030-021-00529-w
Sharma, K & Trivedi, MK (2022). AHP and NSGA-II-based time–cost–quality trade-off optimization model for construction projects. https://doi.org/10.1007/978-981-16-1220-6_5
Storn, R., & Price, K. (1997). Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. Journal of Global Optimization. https://doi.org/10.1023/A:1008202821328
Tiwari, A., Sharma, K. & Trivedi, M.K. (2020). NSGA III based time-cost-environmental impact trade-off optimization time – cost – environmental impact trade-off optimization model. https://doi.org/10.1007/978-981-16-1220-6
Tiwari, A., & Trivedi, M. K. (2021). Practical tool for development of non-dominated optimum front in time-cost trade-off analysis. Journal of the Institution of Engineers (india), 102(4), 1073–1088. https://doi.org/10.1007/s40030-021-00554-9
Tiwari, S., & Johari, S. (2015). “Project scheduling by integration of time cost trade-off and constrained resource scheduling. Journal of the Institution of Engineers (india). https://doi.org/10.1007/s40030-014-0099-2
Tizhoosh, H.R. (2005). Opposition-Based Learning: A New Scheme for Machine Intelligence. In Proceedings - International Conference on Computational Intelligence for Modelling, Control and Automation, CIMCA 2005 and International Conference on Intelligent Agents, Web Technologies and Internet
Xu, J., Zheng, H., Zeng, Z., Shiyong, Wu., & Shen, M. (2012). Discrete time-cost-environment trade-off problem for large-scale construction systems with multiple modes under fuzzy uncertainty and its application to Jinping-II hydroelectric project. International Journal of Project Management. https://doi.org/10.1016/j.ijproman.2012.01.019
Yang, I. T. (2007). Using elitist particle swarm optimization to facilitate bicriterion time-cost trade-off analysis. Journal of Construction Engineering and Management. https://doi.org/10.1061/(ASCE)0733-9364(2007)133:7(498)
Zhang, L., Jingjing, Du., & Zhang, S. (2014). Solution to the time-cost-quality trade-off problem in construction projects based on immune genetic particle swarm optimization. Journal of Management in Engineering. https://doi.org/10.1061/(ASCE)ME.1943-5479.0000189
Acknowledgements
Authors appreciate the faculty and staff members of Department of Civil Engineering, MITS Gwalior, who have motivated the authors to conduct this work.
Funding
No funding was received during the preparation of manuscript.
Author information
Authors and Affiliations
Contributions
KS and MKT collected the data, developed the methodology and wrote the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests with anyone.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sharma, K., Trivedi, M.K. Modelling the resource constrained time-cost-quality-safety risk-environmental impact trade-off using opposition-based NSGA III. Asian J Civ Eng 24, 3083–3098 (2023). https://doi.org/10.1007/s42107-023-00696-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42107-023-00696-0